ПРЕОБРАЗОВАНИЯ ПЛОСКОСТИ §5.1. Произведение матриц
реклама

103
Раздел 5
Преобразования плоскости
Раздел 5
ПРЕОБРАЗОВАНИЯ ПЛОСКОСТИ
§5.1. Произведение матриц
Определение
5.1.1.
Матрица C
вается
размера mxn (с элементами ji , i [1, n] , j [1, m] ) назы-
произведением
матрицы
A
jk , j [1, m] , k [1, l ] ) на матрицу
размера
B
mxl
(с
элементами
размера lxn (с элементами
l
ki , k [1, l ] , i [1, n] ), где ji jk ki , i [1, n] , j [1, m]
k 1
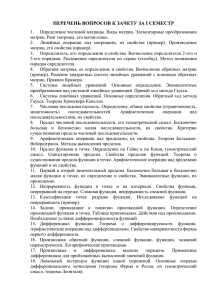
Результат произведения матриц - матрица C , есть матрица размера mxn при любом
l, которая обозначается как C A B . Правило нахождения компонентов произведения
по компонентам сомножителей матричного произведения иллюстрирует рис. 5.1.1.
Пример
5.1.1.
Приведем результаты произведения матриц, имеющих не более чем пару
строк или столбцов.
1. Пусть размер
будет 2x1
A есть 2x2, а размер B - 2x1, тогда размер C
C A B
11 12 11
12 21
.
11 11
21 22 21 2111 22 21
2. Если размер A есть 2x2, а размер B - 1x2, то размер C будет
1x2
11 12
C B A 11 12
21 22
11 11 21 12
12 11 22 12
.
104
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
3. Наконец, пусть размер
иметь размер 2x2
C A
B
11
21
12
22
...
...
...
...
...
...
...
...
...
1l
2l
...
...
...
...
...
...
j1
j2
...
...
...
...
...
...
...
...
...
...
...
...
12
22
...
1i
2i
...
...
...
j1
j2
...
...
m1 m2
...
1i
2i
...
...
1n
2 n
...
...
...
...
...
...
...
...
...
...
...
...
...
...
jl
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
ml
...
...
...
...
...
...
l1
l 2
...
li
...
ln
...
...
...
...
...
ji
...
jn
...
...
...
...
...
mi
...
mn
...
11 12
21 22
.
...
1n
2n
...
будет
11 12
21 22
11 11 12 21 11 12 12 22
21 11 22 21 21 12 22 22
...
11
21
есть 2x2, тогда матрица C
B
11 12
21 22
...
m1 m2
A и
l
ji jk ki
k 1
Рисунок 5.1.1.
Замечания о произведении матриц
Из определения произведения матриц непосредственно следует, что для матриц подходящих размеров:
105
Раздел 5
Преобразования плоскости
1. Произведение матриц некоммутативно, то есть в общем случае
A B B A .
2. Произведение
матриц
обладает
A ( B C )( A B ) C .
3. Произведение
матриц
обладает
A ( B C ) A B A C .
свойством
свойством
ассоциативности
дистрибутивности
Отметим еще раз, что произведение двух матриц существует только тогда, когда
число столбцов первого сомножителя равно числу строк второго.
Легко убедиться, что умножение (как справа, так и слева) любой матрицы
A на
подходящего размера единичную матрицу E (см. §1.1.) дает в результате ту же самую матрицу A .
Определение
5.1.2.
Матрица
A
1
называется обратной квадратной матрице
полнены равенства A
1
A A
A
1
A , если вы-
E .
Обратная матрица существует не для произвольной квадратной матрицы. Для существования матрицы обратной к A необходимо и достаточно, чтобы выполнялось условие
det A 0 1).
A , для которой det A 0 , называется вырожденной, а матри-
Определение
5.1.3.
Матрица
Лемма
5.1.1.
Если обратная матрица существует, то она единственна.
ца, для которой det A 0 - невырожденной.
) Правило нахождения определителя квадратной матрицы порядка n приводится в разделе 6.
1
106
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
Доказательство:
Предположим, что невырожденная матрица
A
1
2
. Тогда из равенств A
A
Умножая
A
1
1
дим к
слева
A ( A
A
1
1
1
1
A
A
обе
A
1
2
1
1
1
E и A
A
части
1
2
1
A
) A
A
1
2
1
A
1
2
A
1
1
и
E следует,
E E O .
данного
1
имеет две обратные:
A
равенства
на
O O или, учтя, что
A
A
1
1
1
1
,
получаем
A E , прихо-
O .
Лемма доказана.
В частном случае, когда
A
11 12
и если det A 0 , матрица
21 2 2
A
1
имеет
вид
A
1
1
det A
22 12
.
21
11
Для квадратных матриц порядка n справедливы 1) следующие равенства
B ) det ( A ) det ( B ) ;
det ( A
det A
Пример
5.1.2.
T
det A ;
det A
1
1
det A
.
Используя матричные операции, систему линейных уравнений
111 12 2 1
211 22 2 2
можно записать в виде
A
x b , где
) Для n 2 эти соотношения проверяются непосредственно по определению 1.1.9., случай произвольного n
рассматривается в разделе 6 .
1
107
Раздел 5
Преобразования плоскости
x
1
;
2
а ее решение (если существует
Пример
5.1.3.
1
A
11 12
,
21 22
A
;
x A
), - в виде
1
b .
Формулы перехода от одной декартовой системы координат к другой
(1.8.2.) с помощью матричных операций могут быть записаны в виде
g1
g1
g2 S
T
где S
g2
;
g3
Теорема
5.1.1.
1
2
b
g3
1
1
1
2 S 2 2 ,
3
3
3
- матрица перехода.
B )T B
Имеет место соотношение ( A
T
A
T
.
Доказательство:
Будем предполагать, что размеры матриц A и B таковы, что произведения
матриц, указанные в формулировке теоремы, существуют.
Пусть числа ik , kj , i j суть элементы матриц
A ,
B и C A
B соот-
ветственно. Тогда, согласно определению 5.1.1.,
l
ij ik kj .
k 1
Но, с другой стороны, по определению операции транспонирования 1.1.8.,
l
l
l
k 1
k 1
k 1
iTj j i jk ki kTj iTk iTk kTj ,
откуда, учитывая определение 5.1.1., делаем заключение о справедливости утверждения теоремы.
Теорема доказана.
108
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
Заметим, что согласно правилу транспонирования произведения матриц равенство
g1
g1
g2 S
g3
T
g2 может быть записано в виде g1
g 2
g 3 g1
g3 S .
g2
g3
Для дальнейших рассуждений нам будет полезно следующее вспомогательное
утверждение.
Лемма
Пусть произведение квадратной матрицы Q на произвольный n5.1.2.
компонентный столбец x
есть нулевой n-компонентный столбец, то-
гда матрица Q нулевая.
Доказательство:
Пусть Q
11 12
21 22
...
...
n1 n 2
0
... 1n
... 2 n
...
...
...
. Выберем в качестве
x
столбец вида
... nn
1 , где
...
0
0
1i
0
...
...
...
1 ii 0 и, в силу произ...
...
...
0
ni
0
вольности i , приходим к заключению о справедливости утверждения леммы.
единица стоит в строке с номером i . Тогда Q
Лемма доказана.
Теорема
5.1.2.
Для невырожденных, одинакового размера квадратных матриц
B справедливо соотношение ( A
B ) 1 B
1
A
1
A
и
.
Доказательство:
1. Пусть произведение матрицы ( A
столбец
x
есть столбец
самое, x A
B
c
B ) 1 на некоторый n-компонентный
c . Тогда ( A
B ) 1 x c
(см. определения 5.1.1. и 5.1.2.).
или, что, то же
109
Раздел 5
Преобразования плоскости
2. С другой стороны, из последнего равенства получаем, что
и, аналогично, B
1
A
1
1
A
x B
c
x c .
1
1
A
x c ,
3. Вычитая почленно равенства ( A B ) 1 x c и B
приходим, в силу дистрибутивности матричного произведения, к соотношению
B ) 1 B
(( A
1
вольности столбца
левая.
A
1
) x o , которое, по лемме 5.1.2., в виду произ-
x , означает, что матрица ( A
B ) 1 B
1
A
1
ну-
Теорема доказана.
1 T
) ( A T ) 1 .
Задача
5.1.1.
Проверить тождество ( A
Определение
5.1.4.
Невырожденная квадратная матрица Q , для которой
вается ортогональной.
1
Q
T
Q , назы-
Свойства ортогональных матриц, играющих важную роль во многих приложениях,
можно сформулировать в виде следующих теорем.
Теорема
5.1.3.
Для ортогональной матрицы Q справедливо равенство det Q 1 .
Доказательство:
Умножая равенство
Q
1
Q
T
последовательно справа и слева на Q , мы в силу
определения 5.1.2. приходим к соотношению
Q
T
Q Q Q
T
E . Откуда
находим, что det 2 Q 1 , поскольку:
-
определитель произведения квадратных матриц одинакового размера равен произведению определителей сомножителей;
-
определитель матрицы не меняется при ее транспонировании;
-
det E 1 .
Теорема доказана.
110
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
Теорема
5.1.4.
Каждая ортогональная матрица второго порядка
det Q 1 может быть представлена в виде
cos
sin
Q , для которой
sin
, где - некоcos
торое число, а каждая ортогональная матрица с det Q 1 - в виде
cos
sin
sin
.
cos
Доказательство:
Пусть матрица Q
равенства
Q Q
11
21
T
12
22
11
21
ортогональная, тогда должны быть справедливы
12
22
1
112 122
1121 1222
2
2
0
1121 1222
21 22
11
12
21
22
E
и,
следовательно,
0
.
1
Последнее матричное равенство может быть записано в виде системы скалярных
условий
112 122 1
1121 1222 0
212 222 1
причем из этих равенств, как было показано при доказательстве теоремы 5.1.3., следует, что det Q 1 . Рассмотрим вначале случай det Q 1 .
Если из суммы первого и третьего уравнений системы вычесть удвоенное равенство
1122 1221 1 , то мы получим
(112 122 ) (212 222 ) 2(1122 1221 ) 0 или (11 22 ) 2 (12 21 ) 2 0
11 22
откуда следует, что
.
12 21
112 122 1
Наконец,
из
условий
212 222 1
имеем
оценки
11 cos
0 112 1 ; 0 212 1 , которые позволяют ввести обозначения
, приво21 sin
;
дящие к требуемому виду матрицы Q поскольку из полученных соотношений следует, что 112 212 1 .
Случай det Q 1 рассматривается аналогично.
Теорема доказана.
111
Раздел 5
Преобразования плоскости
Следствие
5.1.1.
Матрица перехода от одного ортонормированного базиса на плоскости
к другому ортогональная .
Доказательство:
В §1.8. было показано, что S - матрица перехода от одной ортонормированной
системы координат на плоскости к другой, может иметь один из двух следующих
cos sin
cos
sin
видов:
или
, где - угол между первыми базисsin
cos
sin cos
ными векторами. Но тогда матрица перехода
5.1.4.
S
ортогональная в силу теоремы
Следствие доказано.
§5.2. Операторы и функционалы. Отображения и преобразования плоскости
Вводимое в курсе математического анализа понятие функции (как правила, устанавливающего однозначное соответствие между числом, принадлежащим области определения,
и числом, принадлежащим множеству значений) может быть естественным образом обобщено на случай, когда область определения и область значений не являются числовыми множествами.
Определение
5.2.1.
Будем говорить, что задан оператор Â , действующий на множестве со
значениями в множестве , если указано правило, по которому каждому
элементу множества поставлен в соответствие единственный элемент из
множества .
Â
Символически
результат
действия
оператора
обозначается
так:
ˆ
y Ax , x ; y . Элемент y в этом случае называется образом элемента x, элемент x
- прообразом элемента y.
Определение
5.2.2.
Если - область значений некоторого оператора - является числовым множеством, то говорят, что на множестве задан функционал.
Функционалы
y ( x ) , x .
обычно
обозначаются
так
же,
как
и
функции:
например,
112
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
Пример
5.2.1.
1.
Если каждому вектору x в пространстве поставлен в соответствие
вектор y , являющийся ортогональной проекцией вектора x на неко
x торую ось l , то говорят, что в пространстве задан оператор y Pr
l
ортогонального проектирования векторов на ось l. В этом случае символически можно записать, что Aˆ P̂rl .
2.
Каждой дифференцируемой на [ , ] функции f ( ) можно поставить в однозначное соответствие f ( ) - ее производную функцию,
поэтому можно говорить об операторе дифференцирования
d
d
f ( )
f ( ) , символически обозначаемом как Aˆ
.
d
d
3.
Каждому вектору x в пространстве можно поставить в однозначное
соответствие число
x
- его длину. Очевидно, что данная зависи-
мость является функционалом, заданным на множестве векторов.
4.
Для каждой непрерывной на [ , ] функции f ( ) существует одно
значно вычисляемый определенный интеграл
f ( )d ,
который
можно рассматривать как функционал Ф ( f ) f ( )d на множестве
функций, непрерывных на [ , ] .
Определение
5.2.3.
Оператором Â , отображающим плоскость (или просто отображением
плоскости) P на плоскость Q, называется правило, по которому каждой
точке плоскости P поставлена в соответствие единственная точка плоскости
Q.
Отображение плоскости принято обозначать следующим образом: Aˆ : P Q . Если
точка M плоскости P отображается в точку M плоскости Q , то это представляется как
M Aˆ M , при этом точка M является образом точки M, а точка M - прообразом точки
M.
Определение
5.2.4.
Отображение Aˆ : P Q называется взаимно однозначным, если каждая
точка плоскости Q имеет прообраз и притом единственный.
113
Раздел 5
Преобразования плоскости
Определение
5.2.5.
Отображение Â плоскости P в саму себя называется преобразованием
плоскости P .
Определение
5.2.6.
Последовательное выполнение преобразований M Aˆ M и M Bˆ M
называется произведением (или композицией) этих преобразований.
Произведение операторов записывается в виде M Bˆ Aˆ M . Заметим, что в общем
случае это произведение не коммутативно, но ассоциативно.
Определение
5.2.7.
Определение
5.2.8.
Преобразованием, обратным взаимно-однозначному преобразованию
Aˆ : P Q , называется оператор Aˆ 1 : Q P такой, что для каждой точки
M плоскости P имеет место Aˆ 1 ( Aˆ M ) Aˆ ( Aˆ 1 M ) M .
Точка плоскости P, переводимая преобразованием Â сама в себя, называется неподвижной точкой для Â . Множество на P состоящее из неподвижных точек для Â называется неподвижным для Â .
Множество точек P переходящее при Â само в себя называется инвариантным множеством преобразования Â .
§5.3. Линейные операторы на плоскости
Пусть на плоскости с декартовой системой координат {O, g1 , g 2 } каждой ее точке
M поставлена в однозначное соответствие точка M , то есть, согласно определению 5.2.6.,
задано преобразование этой плоскости M Aˆ M . Пусть координатные представления ради
x
y
ус-векторов этих точек суть rM
g
и rM
g
x
, тогда координаты x и y будут
y
x Fx ( x , y )
некоторыми функциями от x и y
и потому равенство
y Fy ( x , y )
Fx ( x , y )
x
F ( x , y ) можy
y
но рассматривать как координатное представление оператора rM Aˆ rM , являющегося дан
ным преобразованием плоскости в системе координат {O, g1 , g 2 } .
Далее мы будем рассматривать частные, но важные для приложений виды функций
Fx ( x , y ) и Fy (x , y ) .
114
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
Определение
5.3.1.
Оператор rM A rM называется линейным оператором, если в каждой декартовой
системе
координат
он
{O, g1 , g 2 }
задается
формулами
x 11x 12 y 1
.
y 21x 22 y 2
x
y
При помощи операций с матрицами линейный оператор может быть записан в виде
x
1
12
A
, где матрица Aˆ g 11
называется матрицей линейного
g y
2
21 22
оператора A , являющейся его координатным представлением в {O, g1 , g 2 } .
Определение
5.3.2.
Оператор rM A rM называется линейным однородным оператором, если
он удовлетворяет определению 5.3.1. и, кроме того, 1 2 0 .
Если же 1 2 0 , то оператор Â называется неоднородным.
Пример
5.3.1.
Теорема
5.3.1.
К линейным однородным операторам относятся:
-
оператор A , действие которого сводится к умножению координат
радиус-вектора прообраза на фиксированные действительные
числа. Этот оператор называется “оператором сжатия к осям”
или, просто, “сжатием к осям” и имеет в ортонормированном ба 0
зисе матрицу Aˆ 1
, где положительные числа 1 и 2 e
0 2
коэффициенты сжатия;
-
оператор ортогонального проектирования радиус-векторов точек
плоскости на некоторую заданную ось, проходящую через начало
координат.
Для линейного однородного оператора A справедливы соотношения:
Ar
, r ,r
1. A (r1 r2 ) Ar
1
2
1 2
2. A ( r ) A r , r ,
Доказательство:
В справедливости утверждения теоремы убедимся непосредственной проверкой, используя правила действия с матрицами. Например, для 1º имеем
115
Раздел 5
Преобразования плоскости
12
Aˆ (r1 r2 ) 11
21 22
(
x1
x
2
y1
y2
)
11 12
21 22
x1
12
11
y1
21 22
x2
y2
ˆ Ar
ˆ
Ar
.
1
2
Теорема доказана.
Если для некоторого оператора A справедливы соотношения
Теорема
5.3.2.
Ar
, r ,r
1. A (r1 r2 ) Ar
1
2
1 2
2. A ( r ) A r , r , ,
то этот оператор линейный и однородный.
Доказательство:
Пусть r x g1 y g2 и A r x g1 y g 2 - соответственно координатные разложения для прообраза и образа, тогда
x g1 y g 2 A ( x g1 y g 2 ) x A g1 y A g 2 .
Вводя обозначения A g1 11 g1 21 g 2 и A g 2 12 g1 22 g 2 , получаем
x g1 y g 2 x Aˆ g1 y Aˆ g 2 (11x 12 y) g1 ( 21x 22 y) g 2 .
x 11 x 12 y
И, окончательно,
, или
y 21 x 22 y
x
y
11 12
21 22
g
x
y
.
Теорема доказана.
Отметим также, что образом вектора a с a
g
координатным представлением Aˆ a
g
ax
ay
в базисе {g1 , g2 } является вектор Â a с
a x
12
11
ay
21 22
ax
.
ay
Из теорем 5.3.1. и 5.3.2. вытекают:
Следствие
5.3.1.
Столбцами матрицы линейного однородного оператора A в базисе
{g1 , g2 } являются координатные представления векторов A g1 и A g 2 .
116
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
Следствие
5.3.2.
Каждому линейному однородному оператору преобразования плоскости в конкретном базисе соответствует квадратная матрица второго
порядка, а каждая квадратная матрица второго порядка задает в этом
базисе некоторый линейный однородный оператор.
Задача
5.3.1.
Исходя из правил действия с матрицами, показать, что для линейных однородных операторов на плоскости справедливы утверждения:
1. Матрица произведения линейных однородных операторов равна
A
B g .
произведению матриц сомножителей: AB
g
g
2. Если A 1 есть оператор, обратный линейному однородному
1
оператору A , то A 1 A .
g
g
Выясним теперь, как изменится матрица линейного однородного оператора при замене базиса. Имеет место
Пусть в системе координат {O, g1 , g 2 } некоторый однородный линейный оператор имеет матрицу A g . Тогда в системе координат
Теорема
5.3.3.
A
{O, g1 , g 2 } этот оператор будет иметь матрицу
g
S
1
A
g
S ,
где S - матрица перехода от {O, g1 , g 2 } к {O, g1 , g 2 } .
Доказательство:
Aˆ
Пусть в исходной системе координат действие задается формулой r
g
а в новой системе координат -
Aˆ
r
g
от
{O, g1 , g 2 }
к
{O, g1 , g 2 }
с
g
, и пусть S
r
S
,
r
g
g
- матрица перехода
g
формулами
перехода
S
r
и
r
g
g
r
r
.
g
g
Подставляя два последних соотношения в первое и принимая во внимание утверждение теоремы 1.8.2. о невырожденности матрицы перехода S (то есть, существование матрицы S
S
1
), получаем, что
Aˆ
r
g
g
S
или r
r
g
S
g
1
Aˆ
g
S
.
r
g
117
Раздел 5
Преобразования плоскости
Наконец, вычитая последнее равенство почленно из равенства
Aˆ
r
g
силу произвольности
g
,в
r
g
(согласно лемме 5.1.2.) приходим к соотношению
r
g
Aˆ
g
S
1
Aˆ
g
S .
Теорема доказана.
Следствие
5.3.3.
Величина det Aˆ
не зависит от выбора базиса.
g
Доказательство:
Поскольку определитель произведения матриц равен произведению определителей
сомножителей, то, в силу теоремы 5.3.3. и невырожденности матрицы перехода
S , имеем
1
1
det A det ( S
Aˆ
S ) det S det Aˆ det S
g
g
1
det S
det Aˆ
g
g
det S det Aˆ
g
.
Следствие доказано.
Задача
5.3.2.
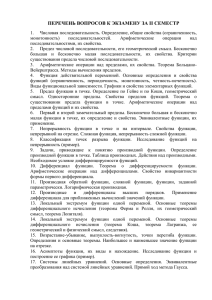
В ортонормированной системе координат найти матрицу оператора, ортогонально проектирующего радиус-векторы точек координатной плоскости на прямую x 3y 2 0 .
Решение:
Пусть точка-прообраз M имеет ради
x0
ус-вектор r0
, а точка M - обy0
раз точки M, соответственно ее ради
x 0
r
ус-вектор 0
.
y 0
Из рис. 5.3.1. следует, что M есть
точка
пересечения
прямой
x 3y 2 0 и перпендикуляра к
ней, проходящего через M.
y
O
x
M
M
Рисунок 5.3.1.
118
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
Поскольку нормальный вектор прямой x 3y 2 0 является направляющим вектором этого перпендикуляра, то уравнение последнего будет иметь
x
x0
1
вид
. Откуда следует, что координаты радиус-вектора
y
y0
3
точки M будут удовлетворять системе уравнений
9
3
1
x 0 x 0
x 0 10 x 0 10 y 0 5
или
.
y 0 y 0 3
3
1
3
x 3y 2 0
y0 x0
y
0
0
10
10 0 5
Используя правила операций с матрицами, получаем окончательно, что
9
3
9
3
1
x
x0
0
10
10 .
10
5 , то есть Aˆ 10
3
1
3
3
1
e
y
y0
0
10
10
5
10
10
§5.4. Аффинные преобразования и их свойства
Линейные операторы, преобразующие плоскость саму в себя (то есть линейные операторы вида A : P P ) и имеющие обратный, играют важную с практической точки зрения
роль и потому выделяются в специальный класс.
Определение
5.4.1.
Линейный оператор
x
A
y
саму на себя, с матрицей
det
Теорема
5.4.1.
Aˆ
g
g
x
1
, отображающий плоскость P
y
2
11 12
, для которой в любом базисе
21 22
11 12
0 , называется аффинным преобразованием плоскости.
21 22
Если линейное преобразование аффинное в некоторой декартовой системе координат, то это преобразование будет аффинным и в любой
другой декартовой системе координат.
Доказательство:
По следствию 5.3.3. определитель матрицы линейного оператора не зависит от выбора базиса, поэтому для аффинности линейного преобразования достаточно, чтобы
det A g 0 хотя бы в одном базисе.
Теорема доказана.
119
Раздел 5
Преобразования плоскости
Каждое аффинное преобразование имеет единственное обратное, которое также является аффинным.
Теорема
5.4.2.
Доказательство:
Поскольку det Aˆ
(см.
Aˆ
g
g
0 , то матрица
Aˆ
1
существует, единственна и невырожденная
g
§5.1.), а, в силу теоремы 1.1.2., система
x
x
1 всегда имеет единственное решение
2
y
y
линейных уравнений
x
для любого вектора
y
x
. Но это означает, что между образами и прообразами аффинного преобразоваy
ния существует взаимно однозначное соответствие, то есть для Â существует единственное
обратное
аффинное
преобразование,
задаваемое
формулами
1
x
x
ˆ 1 1 .
A
Aˆ g1 1 , где
g
2
2
y
2
y
Теорема доказана.
Для выяснения геометрического смысла числовых характеристик матрицы аффинного преобразования переформулируем определение 1.8.3. ориентации пары неколлинеарных
векторов на плоскости, использовавшись операцией векторного произведения.
Определение
5.4.2.
Пусть n есть некоторый нормальный вектор плоскости P , направленный в
сторону наблюдателя. Тогда пару неколлинеарных векторов a и b назовем
право ориентированной, если существует 0 такое, что [ a , b ] n и, соответственно, - лево ориентированной, если существует 0 такое, что
[a , b ] n .
Тогда будет справедлива
Теорема 5.4.3.
1.
При аффинном преобразовании отношение площади образа параллелограмма к площади самого параллелограмма равно абсо11 12
лютной величине det
.
21 22
120
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
При аффинном преобразовании ориентация образов пары векто11 12
0,
ров совпадает с ориентацией прообразов, если det
21 22
2.
и меняется на противоположную, если det
11 12
0.
21 22
Доказательство:
Рассмотрим некоторый базис образованный векторами g1 и g 2 , образы которых при
аффинном преобразовании
g1 Aˆ g1 11 g1 21 g 2
есть соответственно
Â
и
g 2 Aˆ g 2 12 g1 22 g 2 (рис. 5.4.1.), где, согласно следствию 5.3.2., коэффициенты
, , и являются элементами матрицы линейного оператора A , то есть
11
12
A
g
21
22
11 12
.
21 22
g 2
g1
g1
g2
Рисунок 5.4.1.
По свойству векторного произведения (см. §2.4.) площадь параллелограмма постро
енного на базисных векторах g1 и g2 , S [ g1 , g 2 ] , а площадь параллелограмма
построенного на образах базисных векторов S [ g1 , g2 ] . Поскольку
[ g1 , g 2 ] [11 g1 21 g 2 ,12 g1 22 g 2 ] (11 22 12 21 )[ g1 , g 2 ]
det Aˆ g [ g1 , g 2 ] ,
то S det A
det A
g
g
S
, а ориентация пары векторов
0 и меняется на противоположную при det A
{g1 , g2 } не меняется при
g
0.
121
Раздел 5
Преобразования плоскости
Наконец отметим, что полученные соотношения будут выполнены для любого базиса, а, значит, и для любого параллелограмма.
Теорема доказана.
Теорема 5.4.4.
При аффинном преобразовании всякий базис переходит в базис, а для
любых двух базисов существует единственное аффинное преобразование, переводящее первый базис во второй.
Доказательство:
Пусть аффинное преобразование задано формулами
x 11x 12 y 1
,
y
x
y
21
22
2
тогда образами первой пары базисных векторов будут векторы
2
g1 11 g1 21 g 2
g 12 g1 22 g 2
А, поскольку det Aˆ
T
det Aˆ det
11 12
0 , то векторы g 1 и g 2 линейно
21 22
независимы (теорема 1.6.2.) и из них можно образовать базис.
Сопоставляя определение 1.8.2. и следствие 5.3.1., замечаем, что, в том случае, когда
базис {g1 , g 2 } является образом базиса { g1 , g 2 } при аффинном преобразовании Â ,
матрица перехода от базиса { g1 , g 2 } к базису {g1 , g 2 }
S Aˆ g . Но, поскольку для
любой пары базисов матрица перехода существует, единственна и невырождена, то
будет существовать единственное аффинное преобразование, переводящее первый
базис во второй.
Теорема доказана.
Рассмотрим теперь вопрос о том, что происходит с различными геометрическими
объектами на плоскости при аффинном преобразовании.
Теорема 5.4.5.
При аффинном преобразовании образом прямой линии является прямая.
122
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
Доказательство:
x x0 p
Пусть даны прямая
, где p и q - (не равные нулю одновременно) коор y y0 q
динаты направляющего вектора прямой, и аффинное преобразование
x
1
x
. Тогда образом прямой будет множество точек плоскости с
A
y
2
y
координатами
x (11 x 0 12 y 0 1 ) (11 p 12 q )
,
y ( 21 x 0 22 y 0 2 ) ( 21 p 22 q )
так
как
p 11 p 12q
. Заметим, что, если 11 p 12 q 21 p 22 q 0 , то мы имеем
q 21 p 22q
прямую.
11 p 12 q 0
Предположим противное, пусть
, но в силу аффинности преобразо 21 p 22 q 0
11 12
0 и, следовательно, по теореме 1.1.2., p q 0 есть единвания det
21 22
ственное решение этой системы уравнений, что противоречит условию.
Теорема доказана.
Теорема 5.4.6.
При аффинном преобразовании образом параллельных прямых являются параллельные прямые, общая точка пересекающихся прямыхпрообразов переходит в точку пересечения их образов.
Доказательство:
Предположим, что пара параллельных прямых переведена аффинным преобразованием в пересекающиеся или совпадающие прямые.
Рассмотрим одну из точек, общих для образов прямых. Поскольку аффинное преобразование взаимно однозначно, то прообраз общей точки единственный и должен
принадлежать одновременно каждой из прямых-прообразов.
Однако таких точек нет, ибо прямые-прообразы параллельны. Следовательно, образы
параллельных прямых также параллельны.
Если же прямые-прообразы пересекаются, то в силу взаимной однозначности аффинного преобразования, образом их точки пересечения может быть только точка пересечения образов этих прямых.
Теорема доказана.
123
Раздел 5
Преобразования плоскости
При аффинном преобразовании сохраняется деление отрезка в данном
отношении.
Теорема 5.4.7
Доказательство:
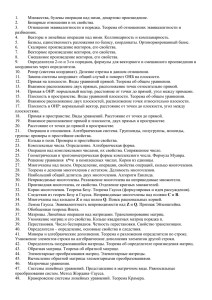
Пусть точки M i ; i 1,2,3 с координатами
xi
являются образами (рис. 5.4.2.) точек
yi
M 2
M i ; i 1,2,3 соответственно с координа-
тами
x2 x1
xi
. И пусть дано, что
,и
x3 x2
yi
M 1
M3
M2
M 3
M1
y 2 y1
, где 1, нужно показать,
y3 y2
что
x 2 x1
y 2 y1
.
и
x 3 x 2
y 3 y 2
Рисунок 5.4.2.
x 11 x 12 y 1
Если аффинное преобразование задано в виде
, то
y 21 x 22 y 2
x 2 x1
x 3 x 2
11 ( x 2 x1 ) 12 ( y 2 y1 ) 11 ( x 3 x 2 ) 12 ( y 3 y 2 )
.
11 ( x 3 x 2 ) 12 ( y 3 y 2 )
11 ( x 3 x 2 ) 12 ( y 3 y 2 )
y 2 y1
.
Аналогично показывается, что
y3 y 2
Заметим, что в ортонормированной системе координат из полученных соотношений следует равенство отношения длин образов и отношения длин прообразов отрезков, лежащих на одной прямой:
M 1 M 2
M 3 M 2
( x 2 x1 ) 2 ( y 2 y1 ) 2
( x 3 x 2 ) 2 ( y 3 y 2 ) 2
( x 3 x 2 ) 2 ( y 3 y 2 ) 2
( x 3 x 2 ) 2 ( y 3 y 2 ) 2
Теорема доказана.
( x3 x2 ) ( y3 y2 )
2
( x3 x2 ) 2 ( y3 y2 ) 2
2
( x 2 x1 ) ( y 2 y1 )
2
2
( x3 x2 ) 2 ( y3 y2 ) 2
M1 M 2
M2 M3
.
124
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
Отметим также, что из теоремы 5.4.7. непосредственно вытекает, что при аффинном
преобразовании отрезок прямой переходит в отрезок.
Теорема 5.4.8.
При аффинном преобразовании отношение длин образов двух отрезков,
лежащих на параллельных прямых, равно отношению длин их прообразов.
Доказательство:
M1 M 2
Пусть дано, что
. Проведем прямую M 3 M 3 , параллельную M4M2. По-
M3 M4
скольку при аффинном преобразовании образы параллельных прямых параллельны,
то в силу теоремы 5.4.6. M 4 M 2 M 3 M 3 и M 4 M 2 M 3 M 3 - параллелограммы. (Рис.
5.4.3.). Следовательно, M 2 M 4 M 3 M 3 .
M 1
M2
M1
M 2
M 3
M4
M 4
M 3
M 3
M3
Рисунок 5.4.3.
Наконец по теореме 5.4.7., получаем
M 1 M 2
3
M M
M 1 M 2
4
3
M M
2
M 1M 2
M 1M 2
M 3 M 2
.
M 3M 4
Теорема доказана.
Теорема 5.4.9.
При аффинном преобразовании всякая декартова система координат
переходит в декартову систему координат, причем координаты образа
каждой точки плоскости в новой системе координат будут совпадать с
координатами прообраза в исходной.
125
Раздел 5
Преобразования плоскости
Доказательство:
M 2
y
y
g 2
M2
M
M
O
g2
g 1
M 1
x
M1
O
x
g1
Рисунок 5.4.4.
Пусть исходная система координат образована базисом { g1 , g 2 } и началом координат
O . Согласно теореме 5.4.4. при аффинном преобразовании базис переходит в базис.
Дополняя преобразованный базис образом начала координат O , мы получаем пре
1
2
образованную систему координат {O , g , g } .
Пусть в исходной системе координаты точки-прообраза M суть x и y , а в преобразованной системе координаты точки-образа M суть x и y (рис. 5.4.4.), тогда в
силу теоремы 5.4.7. будут справедливы соотношения
x
OM1
g1
O M1
1
g
x
;
y
OM 2
g2
O M 2
2
y .
g
После естественного обобщения на случай разных знаков получаем доказываемое
свойство.
Теорема доказана.
Теорема
5.4.10.
Для любой линии второго порядка, указанной в формулировке теоремы 4.4.1. и не являющейся пустым множеством:
-
при аффинном преобразовании ее тип не может измениться;
-
найдется аффинное преобразование, переводящее ее в любую другую линию второго порядка этого же типа.
126
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
Доказательство:
Рассмотрим первое утверждение теоремы.
1. В силу теорем 5.4.6. и 5.4.8. параллелограмм вместе со своей внутренней частью
переходит в параллелограмм и, значит, ограниченная кривая перейдет в ограниченную. Отсюда следует, что эллипсы и точки могут переходить только в эллипсы и точки. С другой стороны, точка не может переходить в эллипс и наоборот,
поскольку это противоречит свойству взаимной однозначности аффинного преобразования.
2. Среди линий второго порядка только гиперболы и параллельные прямые имеют
несвязанные ветви, то есть существует прямая, не пересекающая линию второго
порядка такая, что ветви этой линии расположены по разные стороны от прямой.
Сохранение данного свойства при аффинном преобразовании очевидно. Параллельные же прямые не могут перейти в ветви гиперболы в силу теоремы 5.4.6.
3. Среди непрямых линий второго порядка только парабола является неограниченной, связной кривой. Следовательно, при аффинном преобразовании парабола
может перейти только в параболу.
4. Если линия второго порядка есть точка, прямая или же пара параллельных или
пересекающихся прямых, то из утверждения теорем 5.4.5. и 5.4.6. вытекает, что
их тип не может измениться.
Рассмотрим второе утверждение теоремы.
Из теорем 4.4.1. и 5.4.1. следует, что для каждой линии второго порядка может
быть построено аффинное преобразование, приводящее уравнение линии к одному из следующих девяти видов:
x 2 y 2 1 ;
x2 y2 0 ;
x2 y2 1
y2 1 0 ;
y 2 2x 0 ;
y2 0 .
(5.4.1.)
Но, поскольку уравнения любой пары линий, принадлежащих к одному и тому же
типу, приводятся двумя различными аффинными преобразованиями к одному и тому
же виду из списка (5.4.1.), то в силу взаимной однозначности аффинного преобразования и очевидной аффинности произведения аффинных преобразований следует
справедливость второго утверждения теоремы.
Теорема доказана.
Замечание:
изменение при аффинном преобразовании типа линии второго порядка оказывается также невозможным и для случая "пустых множеств". Справедливость этого утверждения будет показана в §9.4. (теорема 9.4.1.)
127
Раздел 5
Преобразования плоскости
Для всякого аффинного преобразования существует пара взаимно ортогональных направлений, которые переводятся данным аффинным
преобразованием во взаимно ортогональные.
Теорема
5.4.11.
Доказательство:
Рассмотрим ортонормированную систему координат. Пусть пара исходных взаимно
ортогональных направлений задается в ней ненулевыми векторами p и q с координатными представлениями
p
e
и
q
e
.
Потребуем, чтобы их образы (ненулевые в силу аффинности)
p
e
11 12
12
11
21 22
21 22
q
e
11 12
12
11
21 22
21 22
были также взаимно ортогональны. Условие ортогональности векторов p
и q
в
базисе {e1 , e2 } имеет вид
(11 12)(11 12) (21 22)(21 22) 0 или
2
2
2
2
(1112 21 22 ) 2 (11
12
21
22
) (1112 21 22 ) 2 0 ,
а после переобозначения коэффициентов,
U 2 2V U 2 0 .
Рассмотрим следующие случаи:
1) U V 0 . В этом случае любая пара взаимно ортогональных векторов данным
преобразованием переводится во взаимно ортогональную пару векторов.
2) U 0 и V 0 . Тогда 0 , то есть искомая пара векторов - базисная.
3) Наконец, если U 0 , то отношение координат векторов p и q находится из
2V
квадратного уравнения ( ) 2
( ) 1 0 , имеющего действительные реше
U
V
V2
1 при любом ненулевом U.
ния ( )
1, 2 U
U2
Теорема доказана.
128
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
§5.5. Ортогональные преобразования плоскости
Определение
5.5.1.
Ортогональным преобразованием плоскости P называется линейный опе11 12
x
1
x*
ратор Q вида
, матрица которого Q e
* Q e
21 22
y
2
y
ортогональная в любой ортонормированной системе координат.
Заметим, что ортогональное преобразование является частным случаем аффинного
преобразования, поскольку, в силу теоремы 5.1.3., имеет место либо det Q e 1 , либо
det Q
e
1 . Помимо приведенных в §5.4. аффинных свойств, ортогональные преобразова-
ния обладают своими специфическими особенностями. Рассмотрим основные из них.
Признак того, что некоторый линейный оператор является ортогональным, может
быть сформулирован как
Линейный оператор на плоскости является ортогональным, если его
матрица ортогональная хотя бы в одной ортонормированной системе
координат.
Теорема
5.5.1.
Доказательство:
Пусть на плоскости P имеются два ортонормированных базиса {e1 , e2 } и {e1, e2 } с
матрицей перехода S . Согласно следствию 5.1.1. эта матрица также ортогональная
1
и для нее справедливо равенство S
S
T
, и пусть матрица линейного оператора
Q ортогональна в исходном базисе {e1 , e2 } , то есть для нее Q
1
e
Q
T
e
.
Перейдем к базису {e1, e2 } , в котором матрица линейного оператора Q согласно
1
теореме 5.3.3. будет иметь вид Q S
Q S . Найдем в новом базисе матрицу
e
Q
1
e
e
. Используя теоремы 5.1.1. и 5.1.2. , а также ортогональность матриц
S
и
Q e , получим
Q
1
e
( S
1
( S
T
Q
Q
e
e
S ) 1 S
1
S )T ( S
1
Q
Q
1
e
e
( S
1 1
) S
S ) T Q
T
e
1
.
Q
1
e
S S
T
T
Q e ( S
T T
)
129
Раздел 5
Преобразования плоскости
Но равенство Q
1
e
Q
T
означает, что матрица линейного оператора Q ортого-
e
нальная и в базисе {e1, e2 } .
Теорема доказана.
Теорема
5.5.2.
В ортонормированной системе координат ортогональное преобразование плоскости сохраняет:
1.
Скалярное произведение векторов;
2.
Длины векторов и расстояния между точками плоскости;
3.
Углы между прямыми.
Доказательство:
1. Пусть дано ортогональное преобразование плоскости Q̂ с матрицей
Q̂
e
в ор-
тонормированной системе координат {O, e1 , e2 } . Из полученных в §2.3. результа
тов следует, что в ортонормированном базисе {e1 , e2 } скалярное произведение
1
2
векторов a и b с координатными представлениями a
e
и b
e
1
2
может быть представлено в следующем виде
1
a
2
( a, b ) 11 2 2 1 2
T
b
e
e
Тогда, для скалярного произведения образов векторов a и b , принимая во внимание ортогональность матрицы Q̂ e , получаем
(Qˆ a , Qˆ b ) ( Qˆ
T
a
e
e
e
1
e
a
b
e
Qˆ
T
a ) T Qˆ
e
T
Qˆ
e
a
b
e
T
Qˆ e Qˆ
b
e
T
a
E b
e
e
e
(a, b )
b
e
e
Равенство (Qˆ a , Qˆ b ) ( a , b ) , a , b и означает, что при ортогональном преобразовании плоскости скалярное преобразование сохраняется в любом ортонормированном базисе.
2. Из сохранения при ортогональном преобразовании скалярного произведения для
любой пары векторов следует сохранение длин векторов, поскольку этом случае
Qˆ a (Qˆ a, Qˆ a ) ( a, a ) a , a .
130
Лекции кафедры высшей математики МФТИ
“Аналитическая геометрия и линейная алгебра” Умнов А.Е.
3. Поскольку в силу 2 при ортогональном преобразовании равные треугольники
переходят в равные, то будут сохраняться и величины углов между векторами на
плоскости.
Теорема доказана.
Используя свойства ортогональных преобразований, можно показать, что для аффинных преобразований справедлива следующая важная теорема.
Теорема
5.5.3.
Каждое аффинное преобразование может быть представлено в виде
произведения ортогонального преобразования и двух сжатий по взаимно ортогональным направлениям.
Доказательство:
1. В силу следствий 5.3.1. и 5.3.2., а также справедливости утверждений задачи
5.3.1. и примера 5.3.1., нам достаточно убедиться, что матрица каждого аффин
ного преобразования в любом ортонормированном базисе {e1 , e2 } может
быть представлена в виде произведения ортогональной матрицы и диагональной
матрицы с положительными значениями диагональных элементов.
2. По теореме 5.4.11. существует ортогональный (но не обязательно нормирован
ный) базис {g1 , g 2 } , в который данное аффинное преобразование Â переведет
исходный ортонормированный базис {e1 , e2 } . При этом существуют положительные нормирующие множители 1 и 2 такие, что
e1
g1
1
; e2
g2
2
; 1 g1 ; 2 g 2
А это означает, что {e1 , e2 } - базис и притом ортонормированный.
3. С другой стороны, линейное преобразование Q̂ , переводящее ортонормирован
ный базис {e1 , e2 } в ортонормированный базис {e1 , e2 } , очевидно ортогональное
и имеет в исходном базисе ортогональную матрицу Q̂ e . Тогда будут справедливы соотношения
g1
g2
1
0
0
e1
2 e
2
e1
e2
Qˆ
T
e
e1
g1
e2
g2
Aˆ
T
e
e1
e2
,
131
Раздел 5
Преобразования плоскости
из которых следует равенство
(
T
1
0
e
0
2
Aˆ
Qˆ
T
e
)
e1
o .
o
e2
Тогда, в силу линейной независимости базисных векторов {e1 , e2 } , мы имеем
T
Aˆ e
1
0
0
2
Aˆ e Qˆ
e
Qˆ
1
0
0
2
T
или, после транспонирования обеих этого равенства,
e
.
Таким образом, аффинное преобразование представимо в виде произведения ортогонального преобразования и оператора "сжатия к осям" (см. пример 5.3.1.)
Теорема доказана.
§5.6. Понятие группы
Определение
5.6.1.
Множество G называется группой по отношению к заданной операции, если
любым двум его элементам x и y оставлен в соответствие третий элемент
этого же множества, называемый произведением и обозначаемый xy , и если
выполняются следующие условия:
1. x ( yz ) ( xy) z ;
2. существует элемент e такой, что для любого x G xe ex x ;
3. для каждого x существует элемент x 1 такой, что x 1 x e .
Если, кроме того, xy yx , x , y G , то группа называется коммутативной или абелевой.
Пример
5.6.1.
К группам относятся, например, следующие множества:
1) Множество вещественных чисел относительно операции сложения образует группу, где e - число 0.
2) Множество положительных вещественных чисел образует группу относительно операции умножения, где e - число 1.
3) Множество поворотов плоскости вокруг фиксированной точки
образует группу относительно операции композиции.
4) Множество аффинных преобразований плоскости образует
группу относительно операции композиции.