электромагнитного излучения (ЭМИ) 1. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ РАДИОЭЛЕКТРОННОЙ РАЗВЕДКИ
реклама
 1. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ РАДИОЭЛЕКТРОННОЙ РАЗВЕДКИ")
1. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ РАДИОЭЛЕКТРОННОЙ РАЗВЕДКИ
Радиоэлектронная разведка
Радиоэлектронная разведка (РЭР) – получение информации путём приема и
анализа электромагнитного излучения (ЭМИ) радиодиапазона, создаваемого различными
РЭС. В основе радиоэлектронной разведки (РЭР) с применением радиоэлектронных
средств (РЭС) положены демаскирующие признаки объектов разведки (кого ищут) и
действий противника.
Совокупность демаскирующих признаков объекта (важнейших характеристик,
несущих информацию, способствующую их обнаружению) принято называть сигнатурой
(средневековое лат. signatura – знак, от лат. signo – указываю, обозначаю) цели.
Очевидно, что при проведении разведки с помощью технических средств
информативность отдельных характеристик, составляющих сигнатуру цели, будет зависеть
[4] от принципа действия и конструктивных особенностей разведывательной аппаратуры.
Поэтому в исследованиях по заметности должны учитываться потенциальные возможности
средств обнаружения и индивидуальные способности оператора, обслуживающего эту аппаратуру.
Демаскирующие признаки целей (сигнатуры)
Процесс ведения разведки состоит из двух этапов: обнаружение объекта;
распознавание обнаруженного объекта.
Процесс распознавания – это отнесение обнаруженного объекта к одному из
классов объектов по характерным признакам, присущим данному классу, или по
демаскирующим признакам объекта при его распознавании.
К демаскирующим признакам действий противника относятся:
сосредоточение группировок войск и военной техники на возможных
направлениях наступления;
увеличение количества огневых средств на огневых позициях;
повышение активности всех видов разведки и интенсивности функционирования
радиоэлектронных средств.
Одним из существенных демаскирующих признаков, присущим всем без
исключения объектам, является электромагнитное излучение.
Оно может быть естественного (природного) и искусственного происхождения,
первичным (собственным) или вторичным (отраженным).
Собственным является тепловое излучение и электромагнитное излучение РЭС.
Тепловое излучение – электромагнитное излучение, испускаемое объектами с
температурой, большей -273˚С. Оно имеет шумоподобный характер в полосе от
ультрафиолетового до СВЧ (сплошной, но неравномерный спектр).
С повышением температуры излучающей поверхности спектральная плотность
излучения на всех частотах растет. Полная энергия W~К4 (закон Стефана-Больцмана).
Излучения РЭС и ОЭС – это, прежде всего их основные (преднамеренные)
излучения в целях обеспечения функционирования по предназначению – излучения
средств разведки, связи, управления, локации, навигации, радиоэлектронного
подавления.
Особенность основных излучений – наличие закономерностей в их
пространственной, временной и спектральной структуре: диаграмма направленности
излучения, длительность и период следования излучаемых импульсов, несущая частота,
вид амплитудного и фазочастотного спектра, ширина спектра и др.
194
Вторичные электромагнитные излучения – излучения, возникающие за счет
отражения (рассеяния) электромагнитных волн, облучающих объект. Падающие на объект
электромагнитные волны рассеиваются им во всех направлениях, в том числе и в
направлении источника излучения. Для вторичного излучения реальных объектов
характерна зависимость его параметров (интенсивности, спектра, поляризации, наклона
фазового фронта) от отражательной способности, геометрической формы и размеров
объекта, поляризации падающей волны, взаимной ориентации источника облучения и
объекта и, наконец, от параметров их относительного движения.
Первичные и вторичные электромагнитные излучения могут быть приняты и
проанализированы. По результатам анализа делаются выводы об объекте разведки или
намерениях противника. Иными словами, электромагнитные излучения позволяют вести
разведку объектов и их распознавание.
. Радиоэлектронная разведка
Радиоэлектронная разведка (РЭР) предназначена для добывания данных о
противнике с помощью РЭС и ОЭС путем приема и анализа электромагнитных
излучений объектов разведки [4].
В зависимости от применяемых принципов и технических средств РЭР
подразделяется:
на радиоразведку (РР);
радиотехническую разведку (РТР);
радиолокационную разведку (РЛР);
радиотепловую разведку;
оптико-электронную разведку.
РЭР позволяет решать следующие задачи:
обнаруживать объекты;
определять их местоположение и параметры движения;
определять параметры объектов (в том числе РЭС и ОЭС) и характер их изменения
во времени; определять предназначение объектов разведки и их типы – опознавать
их образы.
Для решения указанных задач применяются:
станции радиоразведки;
станции радиотехнической разведки;
радиолокационные, радиотеплолокационные станции (РЛС, РТЛС);
оптико-электронные
средства
(тепловизоры,
оптические
локаторы,
телевизионные станции).
Средства РЭР работают в активном или пассивном режиме (с излучением или без
излучения электромагнитных волн), в широком диапазоне спектра – от оптического до
сверхдлинноволнового.
Они устанавливаются на земле (море), в воздухе и космосе и позволяют вести
соответственно наземную, морскую, воздушную и космическую РЭР. РЭР, как никакой
другой вид разведки, добывает данные о наземных, морских, воздушных и космических
объектах противника в широком диапазоне дальностей (от нескольких километров до
нескольких тысяч километров), высот (от нескольких метров до нескольких сот и тысяч
километров) и условий применения (в простых и сложных метеоусловиях).
РЭР может проводиться без непосредственного контакта с объектом разведки.
Поэтому она малоуязвима для противника.
Эффективность ведения РЭР в значительной степени зависит от выбранного вида
разведки и используемых технических средств, так как каждому из них свойственны свои
возможности и особенности, преимущества и недостатки. Рассмотрим отдельно каждый
из видов РЭР.
195
Радиоразведка добывает данные о противнике путем поиска, перехвата,
пеленгования и анализа излучений его РЭС связи (радиостанций). Радиоразведка
осуществляется
с
помощью
специальных
радиоразведывательных станций,
радиопеленгаторов и радиоразведывательных комплексов.
В результате разведки определяются:
содержание передаваемой информации;
местоположение и тактико-технические данные радиостанций;
интенсивность их работы за некоторый интервал времени;
система расположения радиостанций и плотность их размещения в определенном
районе.
Радиотехническая разведка (РТР) получает сведения о противнике путем
обнаружения и анализа сигналов, излучаемых РЭС локации, навигации, управления и
средствами РЭБ.
РТР ведется с помощью специальных станций радиотехнической разведки. По
данным РТР определяются назначение, тип и местоположение РЭС.
Радиолокационная разведка обеспечивает обнаружение, определение координат и
параметров движения наземных, воздушных и космических объектов противника в
широком диапазоне дальностей и высот.
В основу радиолокационной разведки положены принципы активной
радиолокации.
Достоинство РЛР – она позволяют вести наблюдение объектов при любых
метеоусловиях.
Преимуществом радиолокационной разведки является также то, что РЛС способны
обнаруживать объекты на больших расстояниях – сотни и тысячи километров.
Для ведения воздушной радиолокационной разведки наземных объектов
применяются панорамные РЛС кругового обзора и РЛС бокового обзора (РЛС БО).
Одной из существенно важных характеристик РЛС разведки является их
разрешающая способность по дальности и угловым координатам, определяющая
детальность радиолокационного изображения. Повышение разрешающей способности
РЛС достигается уменьшением длительности импульса, сужением диаграмм
направленности антенн, а также использованием специальных способов преобразований
сигналов в РЛС.
Основной недостаток панорамных РЛС – это низкая линейная разрешающая
способность по азимуту.
РЛС бокового обзора (БО) с так называемой синтезированной апертурой (РСА) –
имеют существенно более высокую разрешающую способность по азимуту, что позволяет
получать радиолокационные изображения земной поверхности и объектов, по дальности
сравнимые с аэрофотоснимками.
Достоинством РЛС БО является также то, что самолеты-разведчики при ведении
разведки могут осуществлять полеты над своей территорией. При этом представляется
возможным вести радиолокационное наблюдение объектов, находящихся на больших
расстояниях от самолета и замаскированных от оптического и ИК-наблюдения.
РЛС БО подразделяют на РЛС с вдольфюзеляжной антенной и РЛС с
синтезированной (искусственной) апертурой антенны.
Высокую угловую и линейную разрешающую способность по азимуту на больших
дальностях от самолета-разведчика имеют РЛС БО с искусственной (синтезированной)
апертурой антенны при малых физических (реальных) ее размерах. Создание
эквивалентных апертур с увеличенной эффективной длиной достигается благодаря
когерентному суммированию отраженных сигналов, принимаемых на определенном
прямолинейном отрезке пути, пролетаемом самолетом. Синтезирование апертуры
позволяет увеличить разрешающую способность РЛС по азимуту в 100 и более раз по
196
сравнению с панорамными РЛС кругового обзора. По разрешающей способности данные
РЛС приближаются к оптическим средствам наблюдения.
К недостаткам РЛС БО относятся необходимость точного выдерживания
горизонтального и прямолинейного полета и зависимость качества радиолокационного
изображения от пространственных флюктуаций траектории полета летательного аппарата
– носителя РЛС.
Радиотепловая разведка основана на обнаружении и определении местоположения
наземных, морских, воздушных и космических объектов по их тепловому излучению в
радиодиапазоне.
Характеристики
радиотеплового
излучения
(интенсивность,
спектральный состав, спектральная плотность) зависят от физических свойств вещества и
температуры излучающего объекта.
Разведка радиоэлектронных средств
РЭС являются важнейшими объектами разведки. На основании анализа данных о
РЭС противника (их местоположении, тактико-технических характеристиках) могут быть
сделаны выводы о группировке сил и средств противника, дана оценка его возможным
замыслам на предстоящие боевые действия [4].
Любая РЭС имеет присущие ему демаскирующие (опознавательные) признаки.
К демаскирующим признакам РЭС относятся его внешний вид, внешний вид
отдельных элементов (прежде всего антенного устройства).
Основным демаскирующим признаком РЭС являются его собственные
электромагнитные излучения. Из сказанного следует, что для разведки РЭС могут быть
использованы практически все известные способы и средства разведки: визуальное
наблюдение, фотографирование, разведка с помощью РЭС.
В зависимости от режима работы РЭС (выключено, включены источники питания,
включен передатчик и т. д.) характеристики теплового излучения будут изменяться. При
облучении (подсвете) РЭС отраженный сиг нал несет информацию о РЭС, особенно о его
антенном устройстве.
Наиболее важные и достоверные данные о РЭС (режимах работы, принципах и
особенностях функционирования, параметрах средств и параметрах сигналов, их
назначении и типе) можно получить при ведении РТР. С помощью ее средств
определяются:
направление на РЭС (как на источник электромагнитного излучения) φ и;
местоположение РЭС;
несущая частота f0;
закон изменения несущей частоты во времени f(t);
амплитудно-частотный спектр сигнала S(ω) или его ширина;
временные параметры сигналов: длительность и и период следования Тп
импульсов; длительность импульсной кодовой посылки и временные интервалы между
импульсами посылки;
время облучения Тобл станции разведки (время воздействия сигнала РЭС);
поляризация электромагнитных волн, излучаемых РЭС;
форма диаграммы направленности антенны РЭС;
режим работы РЭС (импульсный или непрерывный режим излучения
передатчика).
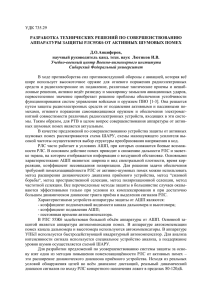
Станция радиотехнической разведки
Станции РТР должны обеспечивать прием сигналов РЭС в заданных диапазонах
частот и направлений, обнаружение сигналов и пеленгацию их источников, анализ и
определение параметров принятых сигналов, регистрацию и документирование
разведданных [4]. Кроме того, может быть предусмотрена передача полученных сведений
на пункт сбора и обработки информации. Указанные функции в станции РТР (рис. 1.4)
197
выполняют: антенное устройство (АУ), приемное устройство (ПРМУ), пеленгационное
устройство (ПУ), устройство анализа параметров сигналов (УАПС), устройство
регистрации разведданных (УРД).
Антенное устройство осуществляет пространственную селекцию (разделение)
сигналов, излучаемых разведываемыми РЭС. Оно должно обеспечивать прием сигналов в
широком диапазоне несущих частот. Для определения направления на источники
сигналов (пеленгации РЭС) применяют антенны с узкой диаграммой направленности.
Пеленгация нескольких РЭС производится путем одновременного (беспоискового) или
последовательного (поискового) пространственного разделения сигналов.
Рис. 1.4. Обобщенная структурная схема станция радиотехнической разведки
Одновременное разделение возможно при приеме сигналов РЭС с разных
направлений на несколько остронаправленных идентичных антенн, диаграммы
направленности которых смещены друг относительно друга на ширину основного
лепестка одиночной антенны. Суммарная диаграмма направленности всех антенн перекрывает заданный диапазон направлений разведки.
Последовательное разделение сигналов осуществляется одной антенной,
принимающей сигналы в пределах основного лепестка ее диаграммы направленности.
Прием сигналов нескольких РЭС в заданном диапазоне направлений разведки
осуществляется за счет последовательного изменения во времени пространственного
положения диаграммы направленности антенны.
Приемное устройство производит прием и селекцию сигналов РЭС по несущей
частоте. Частотное разделение сигналов может быть одновременным (беспоисковым) или
последовательным (поисковым).
При одновременном разделении сигналы нескольких РЭС, с разными частотами,
принимаются независимо несколькими приемными устройствами; их АЧХ разнесены на
ширину полосы пропускания одиночного устройства. В этом случае приемное устройство
станции разведки называют многоканальным. Приемное устройство одного канала может
быть построено, в частности, по схеме приемника прямого усиления.
Последовательное разделение сигналов по частоте производится изменением
частоты настройки приемника в заданном диапазоне несущих частот сигналов РЭС.
Приемное устройство станции разведки в этом случае одноканальное. Для
последовательного разделения могут быть применены супергетеродинные приемники с
перестраиваемым по частоте гетеродином и узкополосным УПЧ.
Основными характеристиками приемных устройств станций РТР являются:
чувствительность (минимальная мощность разведываемого сигнала, при котором
обеспечивается его обнаружение с заданными значениями вероятностей правильного
обнаружения и ложной тревоги); перекрываемый диапазон несущих частот
разведываемых сигналов; точность измерения параметров принимаемых сигналов;
разрешающая способность по измеряемому параметру сигнала.
Пеленгационное устройство определяет направления прихода электромагнитных
волн, излучаемых разведываемыми РЭС. Для определения направления (угловых
198
координат) на РЭС применяются амплитудные, фазовые и частотные методы пеленгации.
По угловым координатам определяется местоположение РЭС.
Основными характеристиками пеленгационных устройств различного типа
являются точность измерения угловых координат РЭС и разрешающая способность по
угловым координатам.
Устройство анализа параметров сигналов предназначено для определения
временных и спектральных параметров сигналов РЭС.
Основными характеристиками анализатора являются: количество измеряемых
параметров сигналов, диапазон значений измеряемых параметров, точность измерения
каждого параметра и разрешающая способность по каждому параметру. Для измерения
значений параметров сигналов применяются различные методы и устройства. Некоторые
из них будут рассмотрены ниже.
Устройство регистрации разведданных служит для автоматической регистрации
параметров принятых сигналов в виде, удобном для анализа и документирования.
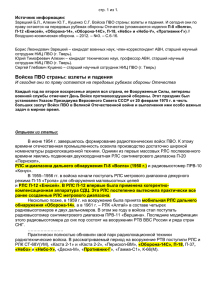
Способы определения местоположения источников электромагнитного излучения
Геометрические параметры положения источников электромагнитного излучения
Для определения положения источника электромагнитного излучения (ЭМИ) с
помощью РЭС [4] измеряют некоторую совокупность геометрических параметров
(величин). Геометрические параметры характеризуют положение источника относительно
одной или нескольких фиксированных точек – точек с известными координатами. В
частности, с помощью РЭС, работающих в пассивном режиме, – средств радио- и РТР,
локации, наведения ракет на источник ЭМИ – определяются пеленг φи источника (рис. 1.5)
из фиксированной точки О и разность дальностей (расстояний) D1–D2 от источника до
двух фиксированных разнесенных точек (О1 и О2 на рис. 1.6).
Под пеленгом φи понимают угол между заданным (выбранным) направлением и
направлением на объект – источник ЭМИ (рис. 1.5). В качестве заданного направления
могут быть направление меридиана (географического, магнитного) или продольная ось
летательного аппарата (самолета, ракеты).
у
и
И
у
Гипербола
И
x
О
x
О1
Рис. 1.5. Пеленг источника
ЭМИ
О
d
О2
Рис. 1.6. Разность дальности
до источника ЭМИ
Измерение геометрических величин позволяет определить линии положения на
плоскости и поверхности положения в пространстве. Линией (поверхностью) положения
называют геометрическое место точек, для которого геометрическая величина,
определяющая возможное положение объекта (источника ЭМИ), имеет постоянное
значение.
199
Если измеряемой геометрической величиной является пеленг, то линия положения
– прямая, проходящая через точки О и И (рис. 1.5), а поверхность положения – плоскость.
Различным значениям пеленгов на плоскости соответствует семейство радиальных
прямых, а в пространстве – семейство плоскостей, проходящих через точку О.
Если измеряемой геометрической величиной является разность расстояний, то
линия положения представляет собой гиперболу, проходящую через точку И. Точки О1 и
О2 – фокусы этой гиперболы (рис. 1.6). Поверхность положения в этом случае –
гиперболоид вращения. Различным значениям разности расстояний соответствует
семейство софокусных гипербол на плоскости или гиперболоидов вращения в
пространстве с фокусами в точках О1 и О2.
Линии и поверхности положения определяют бесконечное множество возможных
положений источника излучения. Для исключения неоднозначности необходимо иметь
как минимум две линии положения на плоскости и три поверхности положения в
пространстве.
В основу определения геометрических параметров положения источников ЭМИ
радиотехническими
методами
положены
закономерности
распространения
электромагнитных волн. В свободном пространстве и в однородных средах
электромагнитные волны распространяются прямолинейно и с конечной постоянной
скоростью. Учет этих закономерностей позволяет измерить геометрические величины по
результатам измерения параметров принимаемого ЭМИ.
Направление на источник ЭМИ в пространстве характеризуется двумя углами во
взаимно-перпендикулярных плоскостях: углом азимута φаз (угол между выбранным
направлением и направлением на источник ЭМИ в горизонтальной плоскости) и углом
места (наклона) φум (угол между выбранным направлением и направлением на источник
ЭМИ в вертикальной плоскости). Так как траектория распространения электромагнитных
волн прямолинейна, то измерение с помощью РЭС углов φаз и φум дает возможность
определять направления на источники ЭМИ.
Постоянство скорости распространения электромагнитных волн позволяет решать
задачи по измерению разности дальностей от точки расположения источника ЭМИ до
фиксированных точек пространства. Измерение разности дальностей сводится к
измерению временных интервалов – разности времен распространения излучения от их
источника до точек расположения приемных устройств РЭС.
В зависимости от вида измеряемой геометрической величины, следовательно, и от
вида линий положения измерители параметров положения источников ЭМИ
подразделяются на угломерные (пеленгаторные) и разностно-дальномерные. Указанные
измерители способны выдавать информацию о параметрах положения источника при
приеме как модулированных, так и немодулированных, в том числе и шумоподобных,
излучений. Иными словами, могут быть приняты излучения не только РЭС связи,
локации, наведения, но и излучения передатчиков радиопомех, тепловые излучения
объектов. Данные об угловых координатах и разности дальностей содержатся в
амплитудных,
фазовых,
временных
или
статистических
в
том
числе
взаимокорреляционных соотношениях сигналов разведываемых РЭС и объектов.
Амплитудные методы пеленгации источников ЭМИ
Фазовый метод пеленгации источников ЭМИ
Методы обзора пространства
Беспоисковый метод обзора (анализа) пространства заключается в том, что все
излучения в разведываемом диапазоне пространства принимаются одновременно [4].
200
При этом радиопеленгатор определяет направления на все источники практически
мгновенно. Одновременный обзор осуществляется с помощью многоканального
пространственно-избирательного устройства – антенной системы, формирующей
многолепестковую неподвижную диаграмму направленности (рис. 1.12). Максимумы
лепестков ДНА смещены в пространстве относительно друг друга примерно на ширину
одного лепестка. Последняя определяет точность и разрешающую способность
пеленгатора по угловым координатам. Поэтому для повышения точности и разрешающей
способности необходимо «сужать» ДНА каждого канала приема. При этом увеличивается
общее число каналов.
Рис. 1.12. Диаграмма направленности радиопеленгатора с одновременным обзором
пространства
Суммарная ДНА пеленгатора перекрывает заданную область разведываемого
пространства. Упрощенная структурная схема радиопеленгатора с одновременным
обзором пространства приведена на рис. 1.13. Прием излучений производится по п
независимым каналам.
А1
УРЧ1
АД1
УРЧ2
АД2
А2
ИНДИКАТОР
Аn
УРЧn
АДn
Рис. 1.13. Упрощенная структурная схема радиопеленгатора с одновременным обзором
пространства
201
Каждый из них принимает излучения в заданном поддиапазоне пространства,
размеры которого определяются шириной диаграммы направленности его антенны.
В качестве приемников в пеленгаторах этого типа часто используются приемники
прямого усиления. Достоинством пеленгаторов с одновременным обзором является то,
что данные о направлении на все действующие источники, находящиеся в поле зрения
ДНА пеленгатора, получают одновременно и с вероятностью, равной единице. Кроме
того, эти данные получают практически мгновенно, так как время, необходимое для
разведки параметра, определяется временем распространения излучения от источника до
пеленгатора и временем распространения принятого излучения от антенны до выходного
устройства.
Беспоисковый метод пеленгации применяется в приемниках оповещения об
облучении летательного аппарата, в станциях радио- и радиотехнической разведки.
Определение пеленга источника ЭМИ при поисковом методе обзора
осуществляется последовательным во времени просмотром разведываемого диапазона
пространства. Для этого изменяют положение диаграммы направленности одноканального
пространственно-избирательного устройства – антенны радиопеленгатора (рис. 1.14). В
частности, это может быть осуществлено путем вращения антенны вокруг вертикальной
оси. За начало отсчета пеленга может быть принято положение максимума ДНА,
совпадающее с заданным направлением, например, с продольной осью ЛА.
Упрощенная структурная схема радиопеленгатора с последовательным обзором
пространства изображена на рис. 1.14.
А
УРЧ
Механизм
поворота
СМ
АД
Усилитель
Гетеро
дин
Устройство
развертки
Индикатор
Рис. 1.14. Структурная схема радиопеленгатора с последовательным обзором
пространства
Прием излучений производится последовательно во времени одной антенной. В
качестве приемников используются приемники супергетеродинного типа. Излучения,
принятые антенной, усиливаются, преобразуются по частоте и поступают на выходное
устройство. В качестве последнего для визуального наблюдения применяется индикатор
электронно-лучевой трубки (ЭЛТ). Выходное устройство сопряжено с антенным
устройством. Линия развертки на индикаторе ЭЛТ перемещается синхронно с изменением
положения максимума ДНА, образуя шкалу пеленгов. При приеме антенной излучения
источника на экране индикатора образуется амплитудная или яркостная отметка.
Положение отметки на шкале пеленга определяет угловое положение источника
относительно заданного направления. Отсчет пеленга производится по максимальному
значению амплитуды сигнала на экране индикатора.
Прием излучения источника и соответственно определение его пеленга при
поисковом методе пеленгации носят вероятностный характер, что является недостатком
202
метода. Этот недостаток может оказаться существенным при разведке РЭС, работающих в
импульсном режиме, кратковременно работающих РЭС и РЛС, работающих в режиме
обзора пространства. Так как просмотр разведываемого пространства производится
последовательно во времени, то некоторые сигналы указанных РЭС могут быть
пропущены (источник в момент излучения находится вне «поля зрения» антенны
пеленгатора). Кроме того, при поисковом методе время, требуемое для определения
пеленга, больше чем при беспоисковом. Оно зависит также всего от скорости вращения
ДНА пеленгатора.
Методы и устройства измерения разности дальностей от источников ЭМИ
Определение разности дальностей от источника ЭМИ возможно только при приеме
его сигналов в двух пространственно разнесенных точках с известными координатами [4].
Оно сводится к измерению разности времен распространения
излучения от источника до этих точек:
12 1 2 ,
12
электромагнитного
(1.4)
где 1 , 2 – время распространения излучения от источника до первой и второй
приемных точек.
Разность
12 пропорциональна разности дальностей D1 D2 . Поэтому по
измеренному временному интервалу 12 и известной скорости с распространения
электромагнитных волн определяется искомая разность дальностей:
D12 D1 D2 с12 .
(1.5)
При отсчете 12 абсолютные величины времени не имеют значения, так как сигнал
источника, принимаемый в одной из точек, используется в качестве опорного (начало
отсчета временного интервала).
В зависимости от режима излучения разведываемого РЭС (импульсный или
непрерывный) для измерения разности дальностей могут использоваться импульсный
(временной) и корреляционный методы.
Импульсный (временной) метод [4] применим только при приеме сигналов РЭС,
работающих в импульсном режиме. Измеритель разности дальностей D12 представляет
собой идентичные приемные устройства, расположенные в двух пунктах, разнесенных на
базу d (рис. 1.15,а).
Каждый из сигналов импульсной последовательности (радиоимпульсы 11 , 21 ,..., n1 ),
принятый в одной из точек (например, в точке 1), после усиления и преобразования (в
частности, из последовательности радиоимпульсов в последовательность видеоимпульсов,
рис. 1.15,б) ретранслируется в другую приемную точку – пункт совместной обработки
сигналов (пункт измерения временного интервала 12 ).
В точке 2 принятая последовательность радиоимпульсов источника ( 12 , 22 ,..., n2 )
подвергается аналогичным преобразованиям. Кроме того, в этой точке указанная
последовательность задерживается на фиксированное время d , компенсирующее время
задержки (распространения) первой импульсной последовательности в канале связи
(ретрансляции). Затем обе импульсные последовательности подаются на измеритель
временных интервалов для измерения 12 .
203
А1
u1(t)
d
УРЧ1
А2 u2(t)
УРЧ2
АД1
ВУ1
АД2
ВУ2
d
Измерит
12
D
а
б
Рис. 1.15. Импульсный измеритель разности дальностей:
а – структурная схема; б – временные диаграммы
Корреляционный метод измерения разности дальностей [4] пригоден при
излучении источником как импульсных, так и непрерывных сигналов, в том числе и
шумоподобных. В основу корреляционного метода положено сравнение сигналов по их
статистическим характеристикам. Одной из таких характеристик является взаимно
корреляционная функция (ВКФ) сигналов РЭС, принимаемых в разнесенных точках.
Устройства, реализующие корреляционный метод измерения разности дальностей,
принято называть корреляционно-базовыми устройствами или системами (КБС). При
применении КБС координаты источника ЭМИ могут быть определены в результате
совместной взаимно корреляционной обработки сигналов одних и тех же источников,
принятых в разнесенных точках.
Для пояснения сущности метода и структуры построения КБС измерения разности
дальностей предположим, что источник излучает непрерывный шумоподобный
стационарный сигнал и(t).
Для статистической радиотехники наибольшие значения имеют три моментные
функции низших порядков – математическое ожидание, дисперсия и функция
автокорреляции [27].
Математическое ожидание
m(t ) x(t )
x w( x)dx M [ x(t )]
есть среднее значение процесса X(t) в текущий момент времени t; усреднение проводится
по всему ансамблю реализаций процесса.
Дисперсия
204
D[ x(t )] Dx (t ) x(t ) m(t ) M [{x(t ) mx (t )} ] ( x mx (t ) ) 2 w( x, t )dx ,
2
2
x Dx
позволяет судить о степени разброса мгновенных значений, принимаемых отдельными
реализациями в фиксированные моменты времени t.
Двумерный центральный момент
o
o
K x (t1 , t 2 ) M x1 (t1 ), x 2 (t 2 ) M { x(t1 ) mx (t1 )}, x(t 2 ) mx (t 2 )}
[ x (t ) m (t )][ x (t ) m (t )]w( x , x ; t , t )dx dx
1
1
x
1
2
2
x
2
1
2
1
2
1
2
называется функцией автокорреляции случайного процесса. Эта функция характеризует
степень статистической связи случайных величин, которые наблюдаются при t=t1 и t=t2,
K x (t1 , t 2 ) t
1 t2 t
2x (t ) .
Процесс называется стационарным, если функции распределения зависят от
взаимных расположений моментов времени, но не от самих моментов
w( x1 , x2 ,... xn ; t1 , t 2 ,...t n ) w( x1 , x2 ,... xn ; t1 t0 , t 2 t0 ,...t n t0 ) ,
то есть распределение вероятностей n–го порядка зависит только от n-1 разностей:
w( x1 , t1 ) w( x1 ,0) w( x) - не зависит от момента времени,
w( x1 , x2 ; t1 , t2 ) w( x1 , x2 ; t1 t1 , t2 t1 ) w( x1 , x2 ;0, ) .
В этом случае математическое ожидание и дисперсия не зависят от времени, а
автокорреляционная функция определяется только разностью времен:
K x (t1 , t2 ) K x ()
( x m )( x
1
x
2
mx ) w( x1 , x2 ; )dx1dx2 -
– это линейная статистическая связь между мгновенными значениями одного и того же
стационарного случайного процесса.
Нормированная автокорреляционная функция
Rx () K x () / 2x
называется также коэффициентом корреляции или взаимно корреляционной функцией
(ВКФ), для нее Rx (0) 1.
Итак, полагаем, что сигнал и(t) распространяется по различным путям и
принимается в двух пространственно разнесенных точках. ВКФ принятых сигналов и1(t) и
и2(t) и, в частности, сигналов на выходах антенны равна
R12 u1 (t )u2 (t ) ,
205
(1.6)
где τ – сдвиг по времени; черта означает усреднение по времени.
В соответствии с алгоритмом (1.6) система взаимно корреляционной обработки [4]
включает в свой состав устройство перемножения входных сигналов и1(t) и и2(t) и
интегратор, производящий интегрирование результата перемножения. При наличии
статистической взаимно корреляционной связи между сигналами и1(t) и и2(t) на выходе
перемножителя действует постоянная составляющая. Постоянная составляющая проходит
через интегрирующее устройство, уменьшающее флюктуации отклика на выходе.
Упрощенная структурная схема разностно-дальномерной КБС представлена на рис.
1.16.
Рассмотрим функционирование КБС при приеме сигнала одного источника.
Сигналы и1(t) и и2(t), принятые антеннами А1 и А2, усиливаются в УРЧ, преобразуются на
промежуточную частоту ωпр и усиливаются в УПЧ. Тракты усиления и преобразования
независимых приемных устройств должны быть идентичными. Сигналы на выходах УПЧ
коррелированы, так как порождены одним источником. Нарушение взаимной корреляции
сигналов на выходах приемников может вызываться различием параметров сред
распространения сигнала от источника к приемным пунктам и неидентичностью
амплитудно- и фазочастотных характеристик приемных устройств.
Выходные сигналы одного из приемных устройств (сигналы с выхода УПЧ 2 )
ретранслируются в другую приемную точку. Сигналы с выхода УПЧ1 задерживаются на
τd для компенсации времени распространения сигнала и2(t) в линии связи.
А
УРЧ1
СМ1
УПЧ1
u1(t)
d
d
Гетеродин
Линия РС
u2(t)
СМ2
з
УПЧ2
X
Ф
Регистрир.
усво
Устройство взаинокорреляционной
обработки
УРЧ1
Рис. 1.16. Структурная схема корреляционного измерителя разности дальностей
Задержанный на τd сигнал подается затем на устройство регулируемой задержки и с
его выхода – на перемножитель устройства взаимно корреляционной обработки.
Таким образом, на выходе перемножителя действуют смеси сигналов и шумов двух
независимых приемных трактов. Перемножение напряжений внутренних шумов
приемников создает на выходе устройства взаимно корреляционной обработки только
флюктуационную составляющую напряжения (внутренние шумы независимы), а
перемножение сигналов источника наряду с флюктуационной составляющей и
регулярную (постоянную) составляющую. Последняя пропорциональна значению ВКФ
принимаемых сигналов и1(t) и и2(t). Изменяя величину τз регулируемой линии задержки,
206
можно установить значение выходного напряжения, пропорциональное максимальному
значению ВКФ. Значение τз в этом случае будет соответствовать разности времен
распространения сигнала τ12 от источника до антенн А1 и А2 .
Методы определения местоположения источников ЭМИ
По совокупности измеряемых геометрических параметров системы определения
местоположения источников ЭМИ подразделяются [4]:
на триангуляционные (угломерные, пеленгационные);
разностно-дальномерные;
угломерно-разностно-дальномерные.
Вид и количество измеряемых геометрических величин определяют
пространственную структуру системы определения местоположения источника ЭМИ:
количество пространственно разнесенных приемных пунктов сигналов источника ЭМИ и
геометрию их расположения.
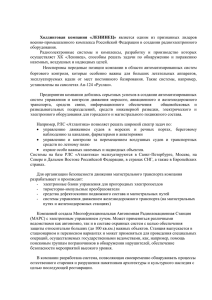
Триангуляционный (угломерный, пеленгационный) метод основан на определении
направлений (пеленгов) на источник ЭМИ в двух точках пространства с помощью
радиопеленгаторов, разнесенных на базу d (рис. 1.18,а).
у
D1
z
И
И
y
h
1
{
D2
O1 d O2 D
x
D
м1D1
м2
а2
h И’
O d 2 O2 x
а
d1
O1
d
а
б
Рис. 1.18. Пояснение триангуляционного метода определения местоположения источника
ЭМИ на плоскости (а) и в пространстве (б)
Если источник ЭМИ располагается в горизонтальной или вертикальной плоскости,
то для определения его местоположения достаточно измерить два угла азимута φ1 и φ2
(или два угла места). Местоположение источника ЭМИ определяется точкой пересечения
прямых О1И и О2И – двух линий положения.
Для определения местоположения источника в пространстве измеряют углы
азимута φ а1 и φ а2 в двух разнесенных точках О1 и О2 и угол места φм1 в одной из этих
точек или, наоборот, углы места φм1 и φм2 в двух точках приема и угол азимута φ а1 в
одной из них (рис. 1.18,б).
Расчетным путем может быть определена дальность от одной из приемных точек
до источника по измеренным углам и известной величине базы d:
D
D1
,
cosм1
D1 sin a1 h ,
tga 2
h
,
D1cos a1 d
отсюда приравняем два выражения для h:
D1 sin a1 tga 2 ( D1 cos a1 d ) ,
207
D1 (cosa1 sin a1ctga 2 ) d .
Таким образом, дальность до источника
D
d
.
cosм1 (cosa1 sin a1ctga 2 )
Триангуляционный метод прост в технической реализации. Поэтому широко
применяется в системах радио- и РТР, в пассивных радиолокационных разнесенных
системах при обнаружении и определении координат излучающих объектов.
Существенным недостатком триангуляционного метода является то, что при
увеличении количества источников ЭМИ, находящихся в зоне действия
радиопеленгаторов, могут происходить ложные обнаружения несуществующих
источников (рис. 1.19). Как видно из рис.1.19, наряду с определением координат трех
истинных источников И1, И2 и И3 обнаруживаются и шесть ложных источников ЛИ1, …,
ЛИ6. Исключить ложные обнаружения при применении триангуляционного метода можно
путем получения избыточной информации о пеленгуемых источниках – увеличением
количества разнесенных радиопеленгаторов или опознаванием принадлежности
получаемой информации к определенному источнику. Опознавание может быть
проведено при сравнении сигналов, принимаемых радиопеленгаторами, по несущей
частоте, периоду следования и длительности импульсов
ЛИ
И3
И1
И2
O1
O2
Рис. 1.19. Пояснение ложных обнаружений несуществующих источников ЭМИ
Дополнительную информацию об источниках получают и за счет взаимно
корреляционной обработки сигналов, принимаемых в разнесенных точках пространства.
Устранение ложных обнаружений при применении триангуляционного метода
возможно также за счет получения данных о разности дальностей от источника излучения
до пунктов приема (пунктов расположения радиопеленгаторов). Если точка пересечения
линий пеленгов не лежит на гиперболе, соответствующей разности дальностей, то она
является ложной.
Разностно-дальномерный метод определения местоположения основан на
измерении с помощью РЭС разности дальностей от источника ЭМИ до пунктов приема,
разнесенных в пространстве на расстояние d. Местоположение источника на плоскости
находится как точка пересечения двух гипербол (две разности дальностей, измеренные в
трех приемных пунктах), принадлежащих различным базам А1А2, A2A3 (рис. 1.20). Фокусы
гипербол совпадают с точками расположения пунктов приема.
208
И
у
D1
D2
D2
x
А1
d12
А2
d13
А3
Рис. 1.20. Пояснение разностно-дальномерного метода определения источников ЭМИ
Пространственное положение источников ЭМИ определяется по трем разностям
дальностей, измеряемым в трех-четырех приемных пунктах. Местоположение источника –
точка пересечения трех гиперболоидов вращения.
Угломерно-разностно-дальномерный
метод
определения
местоположения
предполагает измерение с помощью РЭС разности дальностей от источника ЭМИ до двух
разнесенных приемных пунктов и измерение направления на источник в одном из этих
пунктов.
Для определения координат источника на плоскости достаточно измерить азимут φ
и разность дальностей АД от источника до точек приема. Местоположение источника
определяется точкой пересечения гиперболы и прямой.
Для определения положения источника в пространстве необходимо дополнительно
измерить в одной из точек приема угол места источника ЭМИ. Местоположение
источника находится как точка пересечения двух плоскостей и поверхности
гиперболоида.
Ошибки определения местоположения источника ЭМИ на плоскости зависят от
ошибок измерения двух геометрических величин:
двух пеленгов в триангуляционных системах;
двух разностей дальностей в разностно-дальномерных системах;
одного пеленга и одной разности дальностей в угломерно-разностно-дальномерных
системах.
При центрированном гауссовском законе распределения ошибок определения
линий положения среднеквадратическое значение ошибки определения местоположения
источника:
12 22 2r cos
m
,
sin
где 1 , 2 – дисперсии ошибок определения линий положения; r – коэффициент
взаимной корреляции случайных ошибок определения линий положения Л1 и Л2; γ – угол
пересечения линий положения.
При независимых ошибках определения линий положения r = 0.
При триангуляционном методе определения местоположения источника
2
2
1 D11 , 2 D22
.
Среднеквадратическая ошибка определения местоположения
209
m
D11 2 D22 2
.
sin
При применении идентичных радиопеленгаторов 1 2
m
D1 2 D2 2
sin
.
Наибольшая точность будет при пересечении линий положения под прямым углом
(γ = 90°).
При оценке ошибок определения местоположения источника в пространстве
необходимо рассматривать ошибки измерения трех геометрических величин. Ошибка
определения местоположения зависит в этом случае от взаимной пространственной
ориентации поверхностей положения. Наивысшая точность определения положения будет
при пересечении нормалей к поверхностям положения под прямыми углами.
Способы определения и запоминания частоты сигналов
разведываемых РЭС
Способы определения несущей частоты сигналов
Несущая частота – один из основных параметров, подлежащих определению при
ведении РТР.
Для ее определения разведывательный приемник должен принимать сигналы во
всем предполагаемом диапазоне частот РЭС. Поэтому одна из основных характеристик
разведывательного приемника является диапазон разведываемых частот D f р.
Просмотр разведываемого диапазона может осуществляться: последовательно во
времени (поисковый метод) и одновременно по всем диапазону (беспоисковый).
Поисковые способы [4] определения частоты сигналов требуют определенного
времени на просмотр диапазона D f р, минимальная полоса пропускания приемника много
меньше D f р . Указанный способ реализуется в панорамных одноканальных приемниках
прямого усиления и супергетеродинных приемниках, перестраиваемых по частоте.
Беспоисковые способы [4] реализуются:
в многоканальных приемниках прямого усиления или супергетеродинного
типа;
в приемниках оптико-электронного типа;
в приемниках, использующих устройства функционального типа.
Многоканальный прием основан на принципе разбиения разведываемого диапазона
частот с помощью полосовых фильтров на ряд достаточно узких частотных
поддиапазонов по частям.
Оптико-электронные приемники сочетают радиотехнические устройства с
оптическими, что позволяет реализовать мгновенное преобразование Фурье.
Функциональный измеритель использует зависимость величины выходного
напряжения от несущей частоты.
Функциональные измерители бывают следующие (курсивом выделены наиболее
распространенные):
интерференционного типа;
дисперсионного типа;
поляризационного типа;
корреляционного типа.
210
Существуют комбинированные (поисковые+беспоисковые) способы, которые
реализуют преимущества и свободны от недостатков поисковых и беспоисковых методов.
Поисковые способы определения частоты сигналов
Беспоисковые способы определения частоты
Комбинированные способы определения частоты сигналов [4] реализуются путем
использования различного сочетания приемников беспоискового и поискового типов:
широкополосные РПрУ и узкополосные, многоканальные и одноканальные, включенные
последовательно или параллельно в зависимости от конкретных решаемых задач. Это
позволяет сократить время анализа по сравнению с поисковым способом без ухудшения
точности определения частоты или, наоборот, повысить точность, сократив скорость
анализа.
Анализ структуры сигналов РЭС
Совокупность параметров РЭС, подлежащих радио- и РТР.
Устройства измерения параметров сигналов
Радиосигналы РЭС характеризуются вполне определенной совокупностью
параметров [4], которые описывают их свойства:
пространственные;
временные;
энергетические;
поляризационные;
спектральные;
корреляционные и др.
При РТР измеряются параметры радиосигнала, которые дают о нем наиболее
полное представление и позволяют произвести распознавание типа РЭС. Так, при анализе
импульсных радиосигналов наибольший интерес представляют временные параметры
импульсной последовательности:
длительность τи;
период повторения Тп импульсов;
длительность Тпач пачки импульсов;
период повторения Тпач пачек импульсов;
законы внутриимпульсной модуляции частоты;
коды импульсов.
Радио- и РТР непрерывных радиосигналов позволяет определить:
вид и параметры модуляции;
временные характеристики модулирующих сигналов;
спектральные характеристики модулирующих сигналов;
корреляционные характеристики модулирующих сигналов.
Измерение параметров радиосигналов возможно с использованием
цифровых устройств;
аналоговых устройств;
комбинированных устройств.
Упрощенная структурная схема цифрового измерителя параметров радиосигнала
(устройства цифровой обработки – УЦО) представлена на рис. 1.34. Измеритель состоит
из приемного тракта (ПТ), аналого-цифрового преобразователя (АЦП), блока цифровых
вычислений (БЦВ) и блока управления (БУ).
В приемном тракте осуществляются прием, усиление и селекция радиосигналов в
заданной полосе несущих частот. Операция преобразования аналоговой величины
параметра сигнала в цифровую форму выполняется в АЦП. Измерение величины
211
параметра производится в БЦВ. Алгоритм вычислений задается БУ. Выбор способа
регистрации определяется требуемым быстродействием.
ПТ
АЦП
БЦВ
БУ
Рис. 1.34. Упрощенная структурная схема устройства цифровой обработки сигналов
Аналоговые устройства измерения вычисляют значения параметров сигналов,
являющиеся непрерывной функцией значений исходного сигнала.
Комбинированные устройства измерения параметров сигналов содержат в
различных сочетаниях аналоговые и цифровые измерители.
При цифровой обработке аналоговую величину (t) необходимо преобразовать в
цифровой код (рис. 1.35). Такое преобразование осуществляется квантованием
(дискретизацией) величины (t) по времени и уровням.
Рис. 1.35. Дискретизация сигналов по времени и уровням
Чем меньше интервал дискретизации, тем точнее отображается исходная функция
(t) и меньше ошибки квантования по времени. Однако при этом увеличивается и объем
обрабатываемой информации, что требует увеличения как объема памяти, так и
быстродействия устройства обработки информации.
Цифровые устройства измерения временных параметров
сигналов
Измерение длительности импульсов. Для измерения длительности импульсов [4]
применяется метод счета тактовых (эталонных) импульсов в течение времени действия
входного импульса (сигнала). Счет импульсов обычно производится двоичным цифровым
счетчиком, причем:
– перед поступлением каждого входного импульса счетчик устанавливается в
нулевое состояние 00…0;
– поступление тактовых импульсов на вход счетчика происходит после появления
импульса u1>0 (рис. 1.36) и прекращается после пропадания импульса u1.
Для регистрации импульсов, повторяющихся с частотой Fп, длительность которых
изменяется от импульса к импульсу, используется устройство, структурная схема
212
которого показана на рис. 1.37. Здесь входной импульс uвх подается на
дифференцирующую цепь (ДЦ). Импульс u1>0 устанавливает триггер в положение, при
котором схема И открывает доступ тактовым импульсам u2 на вход счетчика. Импульсы u1
с выхода ДЦ подаются также на ограничитель сверху, пропускающий только импульс
u1<0, который инвертируется схемой НЕ. Положительный импульс с выхода этой схемы
устанавливает триггер Ту в положение, при котором схема И прекращает поступление
импульсов на вход счетчика. Число импульсов, зафиксированное в счетчике,
пропорционально длительности измеряемого импульса. Сформированный в счетчике
цифровой код считывается через вентили Вc при воздействии на них импульса
считывания u4 и передается в другое устройство для дальнейшей обработки информации.
Для подготовки всего устройства к обработке следующего входного сигнала uвх служит
импульс u5 с выхода ЛЗ2 (рис. 1.36 и 1.37), который устанавливает счетчик в исходное
нулевое состояние 00. . .0.
Тактовые (эталонные) импульсы вырабатываются высокостабильным генератором
тактовых импульсов (ГТИ) с периодом повторения Тт. Длительность измеренного
импульса τи≈NTT. Наибольшая методическая ошибка в измерении длительности импульса
равна периоду Tт тактовых импульсов. Относительная величина этой ошибки:
TT
T
1
T .
и NTT N
Рис. 1.36. Графики, поясняющие принцип действия цифрового измерителя длительности
импульсов
213
uвх
ДЦ
u1
НЕ
Огр
ЛЗ1(Т31)
u4
ЛЗ2(Т32)
Ту
u5
u4
u3
ГТИ
u2
счетчик
И
Вс
Вс
Вс
Вс
Цифровой код
Рис. 1.37. Цифровой измеритель длительности импульсов
Если длительность измеряемых импульсов τи =1 мкс, а допустимая величина
ошибки 0,1, то для получения указанной точности потребуются тактовые импульсы
с весьма малым периодом повторения TT и 0.1 мкс (fт=10 МГц) и
соответственно с весьма малой длительностью – около 10…20 нс. При большой же
длительности измеряемых импульсов возникают трудности конструирования ЛЗ.
Измерение периода следования импульсов. Структурная схема цифрового
измерителя периода следования импульсов [4] изображена на рис. 1.38. Основными
элементами устройства являются: генератор тактовых импульсов (ГТИ), счетчик тактовых
импульсов, схемы И, управляющий триггер Ту и вентили Вс считывания цифрового кода.
ГТИ
uт
И
T0
T1
Tn-1
Ty
Вс
uК
uН
Вс
20
Вс
Импульс
установки
нуля
Импульс
считывания
2n-1
21
Цифровой код числа
Рис. 1.38. Измеритель периода следования импульсов
Работа рассматриваемого устройства иллюстрируется временными диаграммами
(рис. 1.39).
214
Рис. 1.39. Графики, поясняющие принцип действия измерителя периода следования
импульсов
ГТИ вырабатывает периодическую (с периодом ТТ) последовательность
положительных импульсов. Короткий импульс uн, возникающий одновременно с началом
анализируемого процесса, длительность которого подлежит измерению, переключает
триггер Ту, управляющий схемой И, в состояние, при котором схема И пропускает
импульсы uТ на вход счетчика импульсов (триггер То). С этого времени производится счет
тактовых импульсов до момента появления импульса uк, фиксирующего окончание
анализируемого процесса. Импульс uк подается на другое плечо триггера Ту и
переключает его, в результате чего схема И закрывает доступ тактовых импульсов на вход
счетчика. Счет импульсов на этом заканчивается.
Цифровой код числа N поступивших на вход счетчика тактовых импульсов
определяет длительность Т процесса (с точностью примерно до периода ТТ длительность
T NTT ). Полученный в счетчике цифровой код числа N считывается посредством
вентилей Вс, управляемых импульсом считывания.
Измерение периода синусоидальных колебаний. При измерении периода
синусоидальных колебаний Тх могут использоваться цифровые измерители [4],
рассмотренные ранее. В процессе измерения Тх необходимо выделить границы периода по
моментам переходов синусоидального колебания через нуль. Эта операция
осуществляется усилителем-формирователем (УФ), структурная схема которого
приведена на рис. 1.40,а.
Для исключения зависимости длительности от амплитуды необходимо увеличить
крутизну колебания в области переходов через нуль. Это достигается за счет усиления
сигнала в усилителе (У), его ограничения в ограничителе (Огр) на определенном уровне
(рис. 1.40,б) и дифференцирования полученного сигнала дифференцирующей цепью (ДЦ).
Для управления работой последующего ключа (Кл) обычно используют типовой узел (рис.
1.40,в), на вход которого через диоды Д проходят только импульсы отрицательной
полярности, на последние реагируют триггеры Тг.
При достаточно больших значениях коэффициента передачи усилителя форма
ограниченного сигнала близка к прямоугольной, т. е. можно считать, что передний фронт
импульсов после дифференцирующей цепи практически совпадает с моментами перехода
измеряемого напряжения через нулевой уровень (рис. 1.40, б).
215
Вариант структурной схемы устройства измерения периода Тх показан на рис. 1.41,
а. В устройстве используется заполнение периода Тх импульсами опорной частоты f0 от
генератора импульсов ГИ (рис. 1.41, б). Если на счетчик ЦС поступило N импульсов, то
Tх NT0 N / f 0 .
uу
uвх
У
Огр
Ключ
uд
ДЦ
Тр.узел
УНЧ
а
б
D
S
D
SET
Q
S
Тг1
.
R
CLR
ДЦ
SET
Q
Тг2
Q
R
CLR
Выход на
ключ
Q
в
Рис. 1.40. Структурная схема устройства измерения периода синусоидальных колебаний
(а), его временная диаграмма работы (б) и структурная схема типового триггерного узла
(в)
Т0
ГИ
Кл
ЦС
Уф
u
а
б
216
Рис. 1.41. Структурная схема устройства измерения периода синусоидальных колебаний
(а) и временные графики его работы (б)
Относительная погрешность квантования в процентах D =100/N=100Т0/Тх=100fх/f0,
т. е. растет прямо пропорционально fх. Поэтому временное преобразование применимо для
измерения параметров только низкочастотных процессов (примерно до 1000 Гц).
Нижний предел по частоте определяется емкостью счетчика, например, при Nmах=
106 и f0=106 Гц , fх min =1 Гц.
Аналоговые устройства измерения временных параметров сигналов
Определение вида и параметров модуляции непрерывных сигналов
Анализ спектров радиоизлучений
ОСНОВЫ ТЕОРИИ РАДИОЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
Виды помех и способы их создания
Способы снижения эффективности применения радио- и оптико-электронных
средств
Эффективность ведения разведки РЭБ [4] в значительной степени зависит от
эффективности функционирования РЭС. В связи с этим уделяется большое внимание
разработке и совершенствованию различных средств и способов борьбы с РЭС
противника, исключающих или затрудняющих возможность их применения по боевому
предназначению.
Эффективность применения РЭС может быть снижена путем их уничтожения или
подавления. При уничтожении наносится такой ущерб, при котором полностью
исключается возможность их применения. В результате подавления показатели
эффективности функционирования РЭС ухудшаются частично (временно).
Наиболее эффективным средством поражения РЭС (как источников ЭМИ)
являются ракеты с головками самонаведения (ГСН) на источник излучения. Применяемые
в равносигнальном направлении (РСН) моноимпульсные системы автоматического
сопровождения по направлению (АСН) и системы АСН с коническим сканированием
обеспечивают высокую точность наведения ракет на источник ЭМИ.
Для
обнаружения
РЭС
и
выработки
команд
целеуказания
противорадиолокационным ракетам используются специальные системы РТР,
устанавливаемые на борту самолета-носителя ракет. Пеленгация РЭС производится
фазовым или амплитудным методом.
217
Несколько слов о моноимпульсных РЛС. Оценивая помехозащищенность
моноимпульсных РЛС по отношению к современным видам помех, необходимо
учитывать, что моноимпульсный метод применяется лишь для измерения угловых
координат. Что касается методов обнаружения, определения дальности и скорости, а
также методов сопровождения по дальности и скорости, то они принципиально не
отличаются от методов, реализуемых в обычных одноканальных РЛС сопровождения.
Поэтому в этой части существует преемственность видов помех и способов защиты от
них между одноканальными и двухканальными координаторами.
Повышенная помехозащищенность угломерного канала моноимпульсных систем
связана с принципом его работы. Как известно, в моноимпульсных системах для точного
определения направления на цель в принципе достаточно одного импульса. Поскольку за
время существования импульса эффективная отражающая поверхность цели практически
не меняется, то моноимпульсная система мало чувствительна к амплитудным
флуктуациям отраженного сигнала и точность ее по сравнению с одноканальными
угломерами выше. При этом за счет эффективного нормирования с помощью сигналов
опорной ДН приемной антенны устраняется любая внешняя амплитудная модуляция.
Отсюда следует, что угломерный канал мало чувствителен и к помехам с амплитудной
модуляцией. Напротив, амплитудно-модулированная помеха, обладая определенным
превышением по мощности над отраженным сигналом, облегчает работу
моноимпульсного угломерного канала, так как увеличивает эквивалентную отражающую
поверхность цели и диапазон дальностей, в котором возможно нормальное слежение за
целью. Это справедливо не только для амплитудно-модулированных помех, но также и
для помех с другими видами модуляции, излучаемыми из одной точки пространства,
например частотно-модулированных и фазомодулированных помех, если только
приемные каналы идентичны по амплитудно-фазовым характеристикам.
Однако на практике трудно создать совершенные моноимпульсные приемники, и
поэтому могут иметь место те или иные недостатки конструктивного и схемного
характера. Эти недостатки могут снижать помехоустойчивость радиолокационных
устройств по отношению к активным помехам, в том числе к помехам, излучаемым из
одной точки.
В соответствии с этим все; возможные помехи угломерным каналам
моноимпульсных РЛС можно разбить на две группы. К первой группе относятся помехи,
создание которых обусловливается возможными конструктивно-схемными недостатками
реализации моноимпульсного метода. Ко второй группе относятся помехи, создание
которых возможно и при идеальной реализации моноимпульсного метода. К таким
помехам относятся: помехи на кроссполяризации, двухчастотная, когерентная,
мерцающая, перенацеливающая.
В основу РЭП положены изменения внешних условий их функционирования. Эти
изменения достигаются преднамеренным воздействием электромагнитными излучениями
на приемные устройства РЭС, применением ложных целей и ловушек, уменьшением
радиолокационной и оптической контрастности (заметности) лоцируемых объектов и
военной техники, изменением свойств (параметров) среды распространения
электромагнитных волн, передачей дезинформирующих сигналов.
Ухудшение показателей эффективности функционирования при радиоэлектронном
подавлении РЭС и ОЭС может проявляться в следующем:
уменьшении дальности действия РЭС;
снижении вероятности обнаружения сигналов (целей) на одной из фиксированных
несущих частот в многоканальных РЭС;
увеличении ошибки автоматического сопровождения цели по одному или
нескольким параметрам (направлению, дальности или скорости);
ухудшении разрешающей способности по дальности и т. д.
218
В крайнем случае, когда РЭП приводит к полному нарушению работы РЭС
противника, оно называется
Помехи и их влияние на функционирование радиоэлектронных средств
Все радио- и оптико-электронные средства, средства радиоэлектронной разведки и
радиоэлектронной борьбы, работают [4] реально в условиях мешающих воздействий.
Применительно к РЭС мешающими воздействиями могут быть механические (вибрации,
удары, перегрузки), климатические (изменения температуры, влажности, давления
окружающей
среды),
воздействия
внешних
магнитных,
электрических
и
электромагнитных полей. При наличии мешающих воздействий потенциальные
возможности применения РЭС и ОЭС по предназначению снижаются.
Под помехами (в технике) понимается обширная область явлений (мешающих
воздействий), препятствующих нормальному функционированию технических устройств,
средств и систем.
Степень отклонения показателей качества функционирования от потенциально
возможных зависит от многих факторов, прежде всего от вида помех и их интенсивности,
от устойчивости РЭС к воздействию помех.
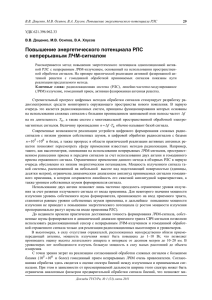
Все без исключения РЭС, упрощенные схемы которых приведены на рис. 2.1-2.3,
включают в свой состав:
источник электромагнитного излучения (передающее
устройство,
отражающий объект, источник теплового излучения);
среду распространения электромагнитного излучения (ЭМИ);
приемное устройство ЭМИ (рис. 2.4).
среда распространения
Источник
ЭМИ
Приемник
ЭМИ
Воздействия на сигнал
(изменения параметров
среды)
Воздействие
на РПрУ
Рис. 2.1. Упрощенная схема систем радиосвязи
Помехи
среда распространения
Источник
ЭМИ
Отражающий
(переизлучающий)
объект
Приемник
ЭМИ
Воздействие
на РПрУ
Помехи
Воздействия на сигнал
(изменения параметров
среды)
Рис. 2.2. Упрощенная схема систем активной радиолокации
219
В каждом из составных звеньев (источнике, среде распространения и приемном
устройстве ЭМИ) указанных систем могут действовать помехи.
Источник теплового
излучения
среда распространения
Приемник
ЭМИ
Помехи
Воздействие
на РПрУ
Воздействия на сигнал
(изменения параметров
среды)
Рис. 2.3. Упрощенная схема систем теплолокации радио и ИК-диапазонов
Помехи
Источник
ЭМИ
Среда
РРВ
Приемное
устройство
Рис. 2.4. Упрощенная обобщенная схема систем передачи, получения и извлечения
информации
Искажения структуры сигнала, формируемой в передатчике, обусловливаются
влиянием внутренних причин:
флюктуациями напряжений источников питания;
флюктуациями параметров элементов;
флюктуациями коэффициентов усиления усилителей.
Подобные же причины искажений структуры принятого сигнала характерны и для
приемного устройства.
Для внешних мешающих воздействий открытыми и уязвимыми звеньями систем
передачи и получения информации являются приемные устройства ЭМИ и среда
распространения.
Воздействие среды распространения на передаваемый (принимаемый) сигнал и
возникающие при этом его искажения обусловлены неоднородностью физических
параметров реальной среды (плотности, температуры, влажности, электронной
концентрации ионосферы) и отличием этих параметров от параметров свободного
пространства.
Чем больше отличие параметров реальной среды от параметров свободного
пространства, тем больше диапазон флюктуаций параметров среды, тем больше
искажения полезного сигнала, тем ниже эффективность функционирования РЭС.
220
Случайные изменения во времени пространственного положения неоднородностей
атмосферы приводят к случайным изменениям параметров сигнала, предсказать которые,
как и принять меры к их устранению, практически невозможно.
Параметры среды распространения ЭМИ могут быть изменены и искусственным
образом путем применения определенных средств и способов. Это означает, что
представляется возможность управлять как характером, так и степенью искажений
сигналов, распространяющихся в среде.
Значительное влияние на эффективность функционирования РЭС могут оказывать
помехи, возникающие за счет отражения (рассеяния) собственных электромагнитных
излучений РЭС от земной поверхности. Электромагнитные волны, излучаемые антенной
РЭС по основному и боковым лепесткам ее диаграммы направленности, рассеиваются
земной поверхностью и объектами, находящимися на ней, в различных направлениях, в
том числе и в направлении источника излучения – в направлении РЭС. Отраженные
сигналы, поступая на вход приемника РЭС, оказывают мешающее воздействие.
Интенсивность отражений зависит от длины волны и поляризации сигнала РЭС, угла
облучения и отражающих свойств поверхности.
Отражение электромагнитных волн от реальных поверхностей представляет собой
совокупность зеркальной (когерентной) и диффузной (некогерентной) составляющих. При
облучении земной поверхности непрерывным гармоническим сигналом
uс (t ) U mс cos с t
отраженный от нее сигнал u с s(t) может быть записан в виде аддитивной смеси
когерентной uскs(t) = Umкcos(ωct-ψ0) составляющей и некогерентной uс.нкs(t) = Umнкcos(ωctψ1(t)) составляющей (узкополосного гауссова шума):
uсs (t ) U mк cos(сt 0 ) U mнн cos(с t 1 (t ))
U m cos(сt (t )),
где Umк,ψ0 – амплитуда и фаза когерентной составляющей отраженного сигнала; Umнк,ψ1(t)
– амплитуда и фаза некогерентной составляющей, изменяющиеся во времени по
случайному закону; U m ( t ) , ψ(t) – амплитуда и фаза отраженного (результирующего)
сигнала, изменяющиеся по случайному закону.
Наличие некогерентной составляющей свидетельствует о том, что спектр
отраженного сигнала отличается от спектра сигнала, излучаемого РЭС.
Приемное устройство (антенна и приемник) – как открытое и уязвимое звено РЭС –
подвержено воздействию всех внешних ЭМИ, спектр которых находится в пределах его
полосы пропускания.
При приеме полезного uc(t) и помехового uп(t) сигналов на входе приемника РЭС
может действовать аддитивная смесь
uвх(t)=uc(t) +uп(t) ,
где uвх(t) отличаются от параметров полезного сигнала. Степень отличия зависит от
структур полезного и помехового сигналов, от их энергетического соотношения.
Очевидно, что чем больше это отличие, тем больше потери принимаемой полезной
информации, тем ниже эффективность функционирования РЭС в условиях воздействия
помех.
Внешними мешающими ЭМИ – радиоэлектронными помехами – могут быть
излучения: 1) естественного (природного), 2) искусственного происхождения.
К первым относятся:
221
тепловое (электромагнитное) излучение Солнца,
планет, земной
поверхности и предметов, находящихся на ней;
атмосферные ЭМИ (обусловленные, например, грозовыми разрядами);
ЭМИ фона околоземного пространства (вызываемые потоком заряженных
частиц в верхних слоях атмосферы).
Искусственные радиоэлектронные помехи (радиопомехи) создаются техническими
средствами (в том числе РЭС), излучающими электромагнитную энергию, а также
объектами, отражающими (рассеивающими) эту энергию. Радиопомехи могут быть
неорганизованными
(непреднамеренными,
неумышленными)
и
специально
организованными (преднамеренными, умышленными).
Неорганизованные радиопомехи РЭС возникают за счет воздействия на приемные
устройства РЭС электромагнитных излучений РЭС и других технических средств и
устройств. Радиопомехи, создаваемые перечисленными техническими средствами и
устройствами, называются индустриальными. Неорганизованные радиопомехи,
обусловленные одновременной работой нескольких РЭС, называют взаимными. Они
возникают в тех случаях, когда спектры частот ЭМИ одних РЭС находятся в пределах
полос пропускания приемников других.
Особенности воздействия на радиоэлектронные средства помеховых
сигналов различного вида
Для подавления РЭС определенного класса и назначения (РЭС связи, локации,
навигации, управления) применяются помеховые сигналы различного вида. Их
воздействие на РЭС может приводить:
к перегрузке его приемника;
к маскированию;
к искажению или имитации полезных сигналов.
На конечный результат (эффективность) воздействия оказывают влияние:
соотношение мощностей помехового и полезного сигналов или абсолютное
значение мощности помехового сигнала на входе приемника подавляемого РЭС;
соотношение ширины спектра помехового сигнала и полосы пропускания
подавляемого устройства (приемника, системы АСН, АСС);
структура полезного сигнала, структура построения подавляемого
устройства и способы повышения помехоустойчивости, применяемые в РЭС;
степень взаимной когерентности или коррелированности помехового и
полезного сигналов или взаимной когерентности помеховых сигналов, действующих на
входе приемника подавляемого РЭС, и др.
Поэтому выбор вида и параметров помехового сигнала (его амплитудной,
частотной, фазовой и поляризационной структуры) должен осуществляться с учетом
структуры полезного сигнала и особенностей функционирования подавляемого РЭС,
требуемого (заданного) эффекта и особенностей воздействия. Рассмотрим возможности
применения некоторых видов помеховых сигналов для подавления РЭС.
Помеховый сигнал в виде немодулированного гармонического колебания в
принципе может быть использован для подавления всех без исключения РЭС. Его
воздействие на РЭС может приводить к перегрузке приемника или искажению полезного
сигнала. Эффективность воздействия зависит от абсолютного значения мощности
помехового сигнала на входе приемника, соотношения амплитуд помехового и полезного
сигналов, разности их несущих частот и начальных фаз, вида полезного сигнала и способа
обработки сигналов в приемнике, от степени взаимной коррелированности помехового и
полезного сигналов. Для обеспечения мешающего воздействия необходимо, чтобы
разность несущих частот помехового и полезного сигналов не превышала примерно
222
половины ширины полосы пропускания линейной части приемника подавляемого РЭС, т.
е.
∆f= |fп - fc |≤0.5∆fпр .
При выполнении этого условия и одновременном воздействии помехового и
полезного сигналов с частотами ωп и ωс и с произвольным соотношением начальных фаз
ψп и ψс на входе УПЧ приемника в результате взаимодействия сигналов образуется
результирующее напряжение, амплитуда которого
U mp (t ) U mп U mс 2U mпU mс cos(бt р )
2
2
,
где Umп и Umс – амплитуды помехового и полезного сигналов; ΨР = ΨП - ΨС – разность
начальных фаз помехового и полезного сигналов; ωб=|ωп-ωс| – частота биений.
При случайном изменении разности частот или фаз (например, из-за
нестабильности частоты генератора помеховых сигналов) мешающее воздействие
помехового сигнала проявляется в том, что амплитуда результирующего сигнала
изменяется во времени случайным образом.
При большой мощности помехового сигнала может наступить перегрузка
приемника помеховым сигналом, при которой прием полезного сигнала исключается.
Приближенным аналогом подобного рода взаимодействия сигналов является
многопутное распространение электромагнитных волн от источника к приемнику,
возникающее в линиях радиосвязи за счет их отражений от протяженных образований
естественного происхождения (земной поверхности, ионосферы). При взаимодействии
прямого сигнала и зеркальной (когерентной) составляющей сигнала, отраженного от
образования, в точке приема возникает явление интерференции и как результат –
замирание принимаемого сигнала. Показатели качества ведения радиосвязи в таких
случаях снижаются.
Подобная картина взаимодействия сигналов имеет место при локации
маловысотных воздушных объектов, при наведении ракет класса «воздух – воздух» на
воздушные цели (при их полетах на малых высотах), при создании радиопомех системам
АСН путем искусственного подсвета земной поверхности.
Помеховые сигналы в виде немодулированного синусоидального колебания не
нашли широкого применения. Это объясняется тем, что, во-первых, при создании
радиопомех требуется высокая точность настройки частоты передатчика радиопомех на
частоту подавляемого РЭС и, во-вторых, от воздействия этих помеховых сигналов можно
легко избавиться путем включения в тракт усиления колебаний радиочастоты
режекторных (вырезающих) фильтров.
Воздействие на приемник РЭС детерминированных амплитудно-модулированных
помеховых сигналов с несущей частотой ωп и начальной фазой ΨП (при условии |ωпωc|≤0.5∆ωпр) может приводить, так же как и рассмотренного выше немодулированного
сигнала к перегрузке приемника, искажению или имитации полезного сигнала РЭС.
Последнее имеет место, например, при создании помех системам АСН с коническим
сканированием.
Детерминированные импульсные помеховые сигналы используют как
имитирующие радиопомехи при подавлении РЭС, работающих в импульсном режиме
излучения (импульсные РЛС, командные радиолинии управления с импульсной
модуляцией). Для эффективного воздействия этого вида помех необходимо, чтобы их
параметры (f0, и, Тп) были бы примерно равны по своим значениям параметрам полезных
сигналов подавляемых РЭС.
223
Непрерывные шумовые помеховые сигналы могут применяться для подавления всех
без исключения РЭС в качестве маскирующих радиопомех. Поэтому важным параметром
этого вида сигналов является коэффициент качества шума ηш= Р'ш /Рш. Среди шумовых
помеховых сигналов наилучшими маскирующими свойствами (при равных средних
мощностях и ширине спектров) обладают прямошумовые помеховые сигналы.
Хаотические импульсные помеховые сигналы по результату воздействия на РЭС
относятся к маскирующим радиопомехам. Эффективность данных радиопомех в
значительной степени зависит от соотношения средних значений параметров импульсной
последовательности (временного интервала между импульсами и их длительности) с
параметрами подавляемого РЭС, в частности, с шириной полосы пропускания приемника.
Формирование сигналов в передатчиках радиопомех
Построение передатчиков прямошумовых радиопомех
Краткая характеристика способов формирования помеховых сигналов. К
настоящему времени определились два основных способа формирования помеховых
сигналов [4] в передатчиках, работающих в радиодиапазоне:
путем автогенерации колебаний с последующим их усилением (или без него);
путем модуляции несущего колебания по тому или иному параметру.
В качестве примера реализации первого способа могут служить так называемые
передатчики прямошумовых радиопомех (ПШП) различных типов.
Модулированные помехи принято разделять по виду модулируемого параметра
несущего колебания:
на амплитудно-модулированные шумовые помехи (АМШП);
фазомодулированные шумовые помехи (ФМШП);
частотно-модулированные шумовые помехи (ЧМШП).
Реально в СВЧ приборах не удается реализовать «чистую» модуляцию по одному
из указанных параметров. Поэтому реально имеет место комбинированная модуляция,
например AM-ФМ; ФМ-AM и т. д. Название помех принято определять тем видом
модуляции, который преобладает в данном передатчике.
СВЧ приборы, применяемые в передатчиках помех:
лампы бегущей волны (ЛБВ-О);
лампы обратной волны со скрещенными полями (ЛОВ-М).
Полупроводниковые приборы:
лавинно-пролетные диоды (ЛПД);
диоды с барьером Шоттки;
биполярные и полевые транзисторы и т. д.
Основное внимание далее будет уделено рассмотрению передатчиков помех на
вакуумных приборах: ЛБВ-О, ЛОВ-М, магнетронах, как наиболее мощных приборах.
Принципы построения передатчиков прямошумовых радиопомех [4]. Известно, что
наилучшими маскирующими свойствами обладают «белые» гауссовы шумы. К «белым»
шумам, подчиняющимся гауссову закону распределения мгновенных значений, относятся
тепловые шумы резисторов, дробовые шумы электронных ламп и полупроводниковых
приборов, фоторезисторов и фотоэлементов. Поэтому естественно стремление
использовать указанные источники шумов для получения помеховых сигналов.
Реализуется это в так называемых передатчиках прямошумовых радиоэлектронных
помех. Шумы первичных источников усиливаются, проходят цепь преобразований
спектра и антенной передатчика излучаются в пространство.
Характерной особенностью помехового сигнала такого вида является то, что все
его параметры – амплитуда, фаза (частота) изменяются по случайным законам.
Общее выражение для напряжения прямошумовых помех имеет вид
224
uп (t ) U m cos(0t D(t )) ,
где Um(t), Δψ(t) – случайные функции времени. Текущее значение частоты помехового
сигнала
(t )
(t )
(D (t ))
0
t
t
является случайной функцией времени с математическим ожиданием, равным ω0.
Обычно для этих сигналов удовлетворяется условие ∆fп/f0 <<1 (∆fп – ширина
спектра помехового сигнала), в связи с чем их часто называют квазигармоническими
шумами.
На практике нашли применение два типа передатчиков прямошумовых
радиопомех:
с прямым усилением шумов первичного источника;
с переносом спектра шумов первичного источника методом гетеродинирования.
Упрощенная структурная схема передатчика прямошумовых радиопомех с
непосредственным (прямым) усилением шумов представлена на рис. 2.8,а. Графики
спектральных плотностей шума первичного источника Gm(f) и формируемого помехового
сигнала Gп(f) приведены на рис. 2.8,б. Там же показан примерный вид амплитудночастотной характеристики перестраиваемого фильтра К2ф(f).
В передатчиках прямошумовых помех (с прямым усилением) используются
специально разработанные вакуумные или полупроводниковые шумовые диоды. В
вакуумном диоде для повышения уровня дробовых шумов используют
высокотемпературный катод прямого накала. Диод работает в режиме насыщения
анодного тока.
В полупроводниковых шумовых диодах используют явления лавинного пробоя.
Но, несмотря на принимаемые меры, уровень спектральной плотности шумов таких
источников не превышает Gm(f) =10-17 …10-16 Вт/Гц, а ширина спектра не превышает
2·108…3·108 Гц.
Требуемая
ширина
спектра
помех
∆fп
формируется
узкополосным
перестраиваемым фильтром. Настройка на несущую частоту подавляемой РЛС f0
производится по сигналам разведывательной части станции помех. Часто настройка
полосового фильтра бывает фиксированной, и каждый передатчик работает на
фиксированной частоте, а заданный диапазон рабочих частот перекрывается помеховыми
сигналами от нескольких передатчиков, спектры которых примыкают друг к другу.
Так как мощность передатчика помех
Рп≈ G п(f0) ∆f п
существенно (в сотни и тысячи раз) превосходит мощность первичного источника шума,
то при формировании узкополосных помеховых сигналов вынуждены применять
многокаскадные резонансные усилители.
Кф(t)
Gш(t)
Источник
шумов
uш
Перестраив
аемый
фильтр
uп
Усилитель
мощности
Команды на перестройку
от разведприемника
а
225
б
Рис. 2.8. Передатчик прямошумовых радиопомех с прямой фильтрацией
спектра шума первичного источника:
а – структурная схема; б – графики, поясняющие его работу
Число каскадов может быть уменьшено при построении передатчика помех по
структурной схеме, приведенной на рис. 2.9, а. Графики спектров, поясняющие работу
передатчика, изображены на рис. 2.9, б. Сравнительно низкочастотные шумы Um(t),
имеющие неравномерную спектральную плотность, поступают на корректирующий
фильтр.
Амплитудно-частотная характеристика фильтра выбирается из условия
выравнивания спектра сигнала первичного источника, т. е.
Kф (F )
k
Gш ( F )
в интервале 0<F<Fmax. Это позволяет выровнять («отбелить») шум первичного источника
( Gш ' ( F ) на рис. 2.9,б). Далее эти шумы поступают на смеситель. На второй вход
смесителя поступают синусоидальные колебания с перестраиваемого по частоте
генератора.
Смеситель собран по балансной схеме. В нем с сигналами осуществляется
операция, близкая к операции умножения, так что
U вых (t ) kсмuп (t )u 'ш (t ) ,
Кф
Источник
шумов
uш
Корректиру
ющий
фильтр
uш’
Балансный
смеситель
uвых
Перестраи
ваемый
фильтр
uп
Усилитель
мощности
uг
Перестраи
ваемый
гетеродин
а
226
Команды на перестройку
от разведприемника
б
Рис. 2.9. Передатчик прямошумовых помех с перекосом спектра:
а – структурная схема; б – графики, поясняющие его работу
где k см – коэффициент передачи смесителя. В результате такого преобразования на
выходе смесителя выделяются две полосы спектра
fi =fг ±Fi (Fi – i-я составляющая спектра шума первичного источника). Из спектра сигнала
на выходе смесителя резонансным перестраиваемым фильтром выделяется полоса частот.
Полученный таким образом сигнал усиливается и излучается в пространство.
Балансный смеситель можно рассматривать и как амплитудный модулятор с
подавлением несущего колебания шума.
Принципы построения передатчиков шумовых радиопомех с амплитудной
модуляцией
Построение передатчика шумовых радиопомех с фазовой модуляцией
Построение передатчика шумовых радиопомех с частотной модуляцией
Принцип действия передатчика хаотических импульсных радиопомех
Хаотической импульсной помехой (ХИП) принято называть сигнал,
представляющий собой последовательность радиоимпульсов, у которых длительность и,
амплитуда Um, период следования Tп являются случайными величинами, а несущая
частота f0=const. Однако энергетически выгодно применять помехи, у которых Um=const.
В этом случае генераторное (усилительное) устройство передатчика используется в
наивыгоднейшем режиме, а в СВЧ-диапазоне устраняется неизбежная паразитная
модуляция колебаний по текущей фазе.
Могут использоваться и ХИП, у которых только один параметр – TП является
случайным, а и =const.
227
Упрощенная структурная схема передатчика ХИП с использованием видеошумов
[4] представлена на рис. 2.19,а. Графики, поясняющие работу устройства, приведены на
рис. 2.19,б.
Видеошумы uш(t), усиленные до необходимой величины, подаются на пороговое
формирующее устройство. В качестве последнего используют заторможенный
мультивибратор или блокинг-генератор.
Для получения случайных импульсных последовательностей, у которых должны
быть случайными как и, так и Tп, применяется триггер Шмитта, который представляет
собой пороговое устройство, срабатывающее при uш(t)≥ U0, (U0 - порог срабатывания) и
возвращающееся в исходное положение, когда uш(t)<U0. Полученная таким образом
последовательность импульсов uи(t) поступает в качестве модулирующего напряжения на
генератор СВЧ-колебаний, в котором превращается в последовательность
радиоимпульсов. Настройка автогенератора на частоту подавляемого РЭС противника f0
осуществляется по сигналам разведприемника.
Генератор
видеошумов
uш
Пороговое
устройство
uи
АГ
Модулятор
СВЧ
f0
РТР
а
б
Рис. 2.19. Передатчик хаотических импульсных радиопомех:
a – структурная схема; б – графики напряжений Шмитта
на входе и выходе триггера
Если в качестве исходного используется гауссов шум с шириной спектра ΔFШ, то
среднее значение числа импульсов в секунду определяется по формуле
m
где
ш
1 DFШ
e
Tп 2 3
U 02
2
2 ш
,
– среднеквадратическое значение напряжения шумов.
Принцип действия передатчика многократных ответных импульсных
радиопомех
228
Активные радиопомехи радиолокационным системам обнаружения целей
Краткая характеристика радиолокационных систем обнаружения воздушных
целей
РЛС обнаружения, наведения и целеуказания (ОНЦ) [4] осуществляет обнаружение
воздушных целей, определение их координат и параметров движения. Полученная
информация используется при решении задач целераспределения, выработке команд
целеуказания ЗРК и ЗСК и наведения ИП на воздушные цели. Указанные РЛС работают в
режиме кругового или секторного обзора воздушного пространства. При работе РЛС
диаграмма направленности антенны (ДНА) периодически перемещается в пределах
заданной зоны обзора пространства. Данные о целях поступают дискретно через интервал
времени Tобз, определяемый скоростью вращения антенны. Обнаружение цели,
определение ее координат осуществляются на проходе в момент нахождения ее в
пределах ДНА в течение времени облучения Tобз.
Измеряемыми координатами целей, как правило, являются дальность от РЛС до
цели Rц и угловые координаты – азимут φц и угол места θц. Могут измеряться также
высота полета целей h и радиальная составляющая скорости их движения vp.
В зависимости от числа измеряемых координат РЛС ОНЦ делятся:
на однокоординатные (радиолокационные дальномеры, высотомеры),
двухкоординатные,
трехкоординатные.
Совокупность двух или нескольких РЛС ОНЦ, информация от которых
объединяется и подвергается совместной обработке, называется радиолокационным
постом. Два или более радиолокационных поста, обменивающихся информацией,
образуют радиолокационную систему (сеть) обнаружения воздушных целей.
В радиолокационных системах информация о целях извлекается из принимаемых
от цели радиосигналов. Наибольшее применение получили активные РЛС. В этих РЛС
радиосигналы образуются в результате облучения целей зондирующими сигналами и
приема от них отраженных сигналов.
В зависимости от вида зондирующих (облучающих цели) сигналов РЛС ОНЦ
делятся:
на импульсные,
непрерывные,
квазинепрерывные.
В импульсных РЛС излучается периодическая последовательность
немодулированных или модулированных радиоимпульсов длительностью τи и периодом
следования Ти. В первом случае РЛС называются РЛС с простыми импульсными
сигналами. Импульсные РЛС, в которых используются радиоимпульсы с внутренней
(частотной или фазовой) модуляцией, называются РЛС со сложными сигналами.
T
Отношение Q и , называемое скважностью импульсной последовательности, у
и
импульсных РЛС равно сотням и тысячам.
К достоинствам импульсных РЛС с большой скважностью относятся:
простота одновременного измерения дальности до нескольких целей и их высокое
разрешение по дальности,
временная развязка излучаемых и принимаемых сигналов, что позволяет
использовать в РЛС для передачи и приема одну антенну.
229
В РЛС с непрерывным излучением (рис.9.1, [3]) излучаются незатухающие
колебания. Эти колебания могут быть гармоническими, модулированными (например,
частотно-модулированными), шумоподобными и др. Их достоинствами являются:
возможность обнаруживать цели путем селекции отраженных сигналов по частоте
Доплера;
однозначно измерять дальность и радиальную скорость полета относительно РЛС
при сравнительно малой мощности излучения.
Приемо-передающая антенна
f0
Когерентный
передатчик
Переключ.прием/передача
Смеситель
Местный
гетеродин
f пч
f 0+f д
f 0+f пч
Смеситель
2
Фильтр
f пч+f д
УПЧ
Фазовый
детектор
fд
Рис. 2.31. Упрощённая структурная схема непрерывной РЛС ( fд – частота Доплера)
РЛС с квазинепрерывным излучением (когерентные импульсные РЛС с малой
скважностью Q=5…30) обладают хорошей разрешающей способностью по дальности и
скорости.
Излучаемые сигналы импульсных РЛС могут быть когерентными или
некогерентными. У некогерентной последовательности начальные фазы от импульса к
импульсу изменяются по случайному закону. Начальная фаза радиоимпульсов
когерентной последовательности изменяется по детерминированному закону или является
постоянной величиной.
По виду обработки отраженных от цели сигналов РЛС также делятся на
некогерентные и когерентные. В некогерентных импульсных РЛС при обработке
отраженного сигнала фаза высокочастотных импульсов не используется. Для получения
информации о координатах цели используется огибающая отраженных радиоимпульсов.
При когерентной обработке принятых импульсных радиосигналов используется
дополнительная информация, заключенная в их фазе. Когерентная обработка позволяет
улучшить характеристики обнаружения РЛС, обнаружить движущиеся цели на фоне
пассивных радиопомех.
РЛС с непрерывным и квазинепрерывным излучением, а также импульсные РЛС со
сложными сигналами являются когерентными. Импульсные РЛС с большой скважностью
могут быть некогерентными и когерентными.
В радиолокационных системах обнаружения местоположение цели в пространстве
определяется как точка пересечения линий или поверхностей положения,
соответствующих измеренным значениям координат. При этом могут использоваться
дальномерный, угломерный, угломерно-дальномерный, разностно-дальномерный,
230
суммарно-дальномерный, угломерно-разностно-дальномерный методы определения
местоположения лоцируемого объекта.
В радиолокационных системах информация о координатах и параметрах движения
целей [4] извлекается из принятых сигналов в результате первичной, вторичной,
третичной обработки.
1. Первичная обработка сигналов осуществляется за один период обзора Tобз (время
облучения цели Tобл) РЛС. При этом предполагается, что за время наблюдения Tн=
Tобз координаты цели не меняются.
2. При вторичной обработке получение информации осуществляется за несколько
периодов обзора РЛС. При этом представляется возможность определить
траекторию полета цели.
3. Третичная обработка выполняется совместной обработкой данных, получаемых
несколькими совмещенными или разнесенными РЛС. В этом случае удается
определить местоположение источников помех.
Наиболее широкое применение нашли некогерентные и когерентные импульсные
РЛС с большой скважностью. Используются также РЛС с квазинепрерывным излучением
и сложными импульсными и шумоподобными сигналами.
Основной задачей РЭП радиолокационных систем обнаружения целей являются
скрытие (маскировка) самолетов, их количества, создание на экранах индикаторов РЛС
ложных отметок целей. Воздействие радиопомех приводит к уменьшению количества
получаемой противником информации об истинных целях, затруднению решения задач
целераспределения, выработки команд наведения на воздушные цели, команд
целеуказания .
Эффективность воздействия радиопомех зависит от структуры построения и
принципа функционирования подавляемой РЛС, вида используемых помеховых сигналов,
способа их создания, применяемых средств помехозащиты и др.
Для маскировки целей (могут применяться активные непрерывные шумовые
радиопомехи, хаотические импульсные помехи (ХИП). При воздействии непрерывных
шумовых помех и ХИП на экране ИКО РЛС появляются засвеченные секторы.
В качестве имитирующих активных помех для подавления РЛС используются
импульсные однократные или многократные ответные помехи (МОП), представляющие
собой один или несколько радиоимпульсов, излучаемых станцией помех, в ответ на
каждый радиоимпульс РЛС, принятый ею.
Радиоэлектронное подавление активными радиопомехами некогерентных
импульсных РЛС
В некогерентных импульсных РЛС ОНЦ при измерении дальности до цели
используется импульсный метод, а при измерении угловых координат – амплитудный
метод максимума. Принцип действия такой РЛС поясняется структурной схемой [4],
изображенной на рис. 2.32.
231
Механизм
поворота
Модулятор
ГРЧ
АП
Гетеродин
СМ
УПЧ
Синхронизатор
Антенна
ССП
АД
ВИ
Индикатор
Рис. 2.32. Структурная схема некогерентной импульсной РЛС ОНЦ
В качестве зондирующих сигналов используется некогерентная
последовательность радиоимпульсов, вырабатываемая генератором радиочастоты
(ГРЧ). Длительность радиоимпульсов задается модулятором, а моменты излучения
(период следования Tп) – синхронизатором. В режиме «Передача» последовательность
зондирующих радиоимпульсов через антенный переключатель (АП) поступает в
антенну и излучается в окружающее пространство.
Обзор пространства, например, в двухкоординатной РЛС осуществляется
поворотом антенны, имеющей сравнительно узкую диаграмму направленности в
азимутальной (горизонтальной) плоскости и широкую в угломестной (вертикальной)
плоскости.
При круговом обзоре РЛС осуществляет однократный обзор пространства за
время Tобз=1/nА, где пА – число оборотов антенны. При этом цель облучается в течение
времени Tобл, которое определяется выражением
Tобл
0.5
,
2n А
где 0.5 – ширина ДНА в азимутальной плоскости (в градусах) по уровню половинной
мощности.
За один оборот антенны на вход приемника поступает пачка из отраженных
радиоимпульсов. Количество импульсов в пачке Nи равно
Nи
Tобл 0.5 Fп
,
Tп
2n А
232
где Fп – частота следования импульсов.
Угловые перемещения антенны (максимума ДНА) в азимутальной плоскости
передаются на индикатор РЛС. В результате формируется радиально-круговая развертка.
Положение радиальной развертки на экране ИКО однозначно определяет направление
максимума ДНА РЛС.
Отраженные от цели сигналы улавливаются антенной, проходят через тракт
обработки и подаются на ИКО РЛС, на котором формируется отметка цели в виде дужки.
Местоположение цели в азимутальной плоскости определяется удалением DЦ отметки от
центра ИКО и углом φЦ..
Полоса пропускания УПЧ согласуется с длительностью радиоимпульса τи и равна
Δf=1/ τи. Однако из-за нестабильности несущей частоты колебаний передатчика,
гетеродина приемника, эффекта Доплера полоса пропускания УПЧ выбирается в 1,5…2
раза шире.
Амплитудный детектор выделяет огибающие принятых радиоимпульсов.
Полученная на выходе детектора за один период обзора пачка видеоимпульсов
накапливается в накопителе (видеоинтеграторе, ВИ) и поступает на ИКО. При небольшом
количестве импульсов в пачке их накопление может осуществляться люминофором
электронно-лучевой трубки с яркостной отметкой ИКО.
Воздействие активных радиопомех на РЛС ОНЦ может приводить к подавлению
сигналов целей в приемном тракте, маскировке полезных сигналов помеховыми, а также к
имитации полезных сигналов.
Подавление полезных сигналов происходит в тех случаях, когда помеховый сигнал
на входе приемника подавляемой РЛС во много раз превышает по амплитуде (мощности)
полезный сигнал и вызывает перегрузку усилительных каскадов, имеющих ограниченный
динамический диапазон. По мере увеличения интенсивного помехового сигнала
результирующая амплитуда выходного сигнала изменяется. При большой интенсивности
радиопомехи полезный сигнал будет ограничен и произойдет его полное подавление.
Перегрузка усилительных каскадов приемников РЛС возможна при создании
импульсных и непрерывных шумовых радиопомех.
Радиоэлектронное подавление активными радиопомехами РЛС с
внутриимпульсной модуляцией
РЛС с ЛЧМ-сигналом [4]. Недостаток импульсных РЛС с простыми сигналами –
при фиксированном значении импульсной мощности передатчика увеличить дальность
действия возможно только за счет увеличения длительности зондирующих радиосигналов.
Но при этом ухудшается разрешающая способность РЛС по дальности ( D c и / 2 ).
Так, увеличение длительности радиоимпульсов с 1 до 100 мкс приводит к ухудшению
разрешающей способности со 150 м до 15 км.
Выход – в использовании РЛС со сложными сигналами. Нашли применение
импульсные РЛС с ЛЧМ и фазоманипулированными (фазокодоманипулированными –
ФКМ) сигналами.
Общим для указанных РЛС является то, что принимаемые отраженные сигналы от
целей подвергаются свертке (сжатию) и последующей когерентной обработке. Так как
структуры сигналов различны, то и «процедуры» сжатия и обработки сигналов в этих РЛС
имеют особенности. В связи с этим имеет особенности и радиоэлектронное подавление
РЛС с ЛЧМ и РЛС с ФКМ - сигналами.
В РЛС с ЛЧМ-сигналами (рис. 2.36) излучается периодическая последовательность
радиоимпульсов достаточно большой длительности и с изменяющейся несущей
частотой внутриимпульсных колебаний по закону f f 0 t при 0 t и (рис.
2.37,а), где α - постоянная величина. Ширина спектра импульсного частотно233
модулированного сигнала Df
B
, Df 2 (В - произведение ширины спектра
и
сигнала на его длительность, называемое базой или коэффициентом сжатия, В>>1). При
и 0,1 мкс 107 с , f 0 10 ГГц , 0,01 f 0 , Df 200 МГц , В=2·10-7·108=20.
t
и
Рис. 2.36. ЛЧМ-сигнал
f
з
fmax
зmax
fmin
зmin
0
и
а
t
fmax f
fmin
б
Рис. 2.37. Графики, поясняющие принцип действия РЛС с ЛЧМ-сигналами: а –
закон изменения частоты радиоимпульсов; б – дисперсионная характеристика линии
задержки устройства обработки сигналов
Обработка сигналов, отраженных от целей, осуществляется корреляционным
приемником или согласованным фильтром. В качестве согласованного фильтра
используется дисперсионная линия задержки, время запаздывания сигнала в которой
зависит от частоты радиоимпульса (рис. 2.37, б). Более низкие мгновенные частоты
радиоимпульса задерживаются на большее время по сравнению с высокими частотами.
Вследствие этого на выходе дисперсионной линии задержки получается укороченный
(сжатый) радиоимпульс, длительность которого сж и / B - в B раз меньше
длительности излучаемого радиосигнала.
Если дисперсионная линия задержки не имеет потерь, то справедливо равенство
Ec вых Ec вх . В этом случае Pc вых / Pc вх и / cж B .
Для радиоэлектронного подавления РЛС с ЛЧМ могут применяться активные
маскирующие или имитирующие радиопомехи.
В качестве маскирующих используются непрерывные шумовые радиопомехи. Для
этого вида помехового сигнала характерно то, что изменения его мгновенной частоты
происходят по случайному закону. Вследствие этого мощность помехового сигнала при
прохождении через дисперсионную линию задержки не изменяется. А так как мощность
полезного сигнала увеличивается в В раз, то коэффициент подавления РЛС с ЛЧМ сигналами при использовании непрерывных шумовых помех в В раз больше, чем при
234
подавлении импульсных РЛС с простыми сигналами (при равенстве импульсных
мощностей передатчиков РЛС).
Имитирующие радиопомехи могут создаваться путем ретрансляции
(переизлучения) сигналов РЛС с задержкой по времени, либо путем смещения частоты
несущей, либо путем дополнительной модуляции сигналов по амплитуде или частоте.
Рассмотрим прохождение таких радиопомех через приемник РЛС.
Радиопомеха, создаваемая путем переизлучения сигналов РЛС с задержкой по
времени, проходит через дисперсионную линию задержки точно так же, как и полезный
сигнал. Если передатчик помех расположен на прикрываемом самолете (цели), то вначале
на выходе дисперсионной линии задержки появится сжатый по времени отраженный
сигнал, а затем помеховый сигнал. Временная задержка помехового сигнала определяется
временем задержки полезного сигнала в ретрансляторе.
Изменение несущей частоты помехового сигнала в ретрансляторе на величину Fр в
диапазоне возможных доплеровских частот приводит к тому, что помеховый сигнал
эквивалентен отраженному с доплеровской частотой Fд= Fр.
При увеличении или уменьшении частоты несущей в ретрансляторе помеховый
сигнал на выходе дисперсионной линии задержки может оказаться слева или справа от
полезного сигнала на временной оси. Это обстоятельство позволяет создавать
опережающую ответную помеху по дальности.
Модуляция амплитуды ретранслированного сигнала шумом приводит к
образованию большого числа ложных отметок. Воздействие такой помехи эквивалентно
воздействию «белого» шума.
При синхронизации модулирующего напряжения ретранслятора сигналом РЛС
такая помеха является более эффективной, чем «белый» шум, так как оказывается
коррелированной с сигналом.
В РЛС с ФКМ-сигналами [4] излучается последовательность радиоимпульсов
(рис. 2.38,в) длительностью и , каждый из которых состоит из В подимпульсов
длительностью и ' cж . Начальная фаза этих импульсов изменяется по вполне
определенному закону (коду) и принимает одно из двух значений - 0 или π.
235
Рис. 2.38. К пояснению принципа действия РЛС с ФКМ-сигналами: мгновенные значения
модулирующего сигнала (а), несущего колебания (б), ФКМ-радиосигнала (в)
Закон изменения фазы несущего колебания показан на рис. 2.38,а. В приемнике с
помощью дешифратора принятые отраженные импульсные сигналы сжимаются по
времени (длительности) в В раз.
Возможная структурная схема дешифратора изображена на рис. 2.39. Дешифратор
представляет собой линию задержки с отводами, отстоящими друг от друга на
длительность и ' . На каждом выходе линии задержки помещается фазовращатель,
который может изменить фазу на π. Выходные сигналы фазовращателей суммируются.
Полученный результат фильтруется в полосе Df 1 / и ' . Код фазовращателей
устанавливается обратным коду излучаемого сигнала. В момент времени, когда сложный
импульс заполнит линию задержки, его элементарные сигналы (подимпульсы) на входе
сумматора оказываются в фазе. Следовательно, амплитуда сигнала на выходе сумматора
U c вых ВU c вх , где U c вх - амплитуда импульса на входе линии задержки. Мощность
выброса шумовых помех на интервале времени и некоррелирована. Поэтому
U П вых ВU П вх .
uвх(t)
Линия задержки
'и
'и
'и
'и
Сумматор
УПЧ
uвых(t)
Рис. 2.39. Устройство сжатия сигналов РЛС с ФКМ-сигналами
Следовательно, в рассматриваемой РЛС по отношению к РЛС с простым сигналом
обеспечивается выигрыш в отношении сигнал/помеха по мощности в В раз, что потребует
для ее подавления увеличения мощности передатчика радиопомех также в В раз.
Коэффициент сжатия В в современных РЛС составляет сотни…тысячи. Коэффициент
подавления рассмотренной РЛС при действии шумовых радиопомех, так же как в РЛС с
ЛЧМ-сигналами, в В раз выше, чем в импульсных РЛС с простыми сигналами.
Для подавления РЛС с ФКМ-сигналами кроме активных шумовых радиопомех
также могут использоваться имитирующие радиопомехи, которые получают путем
ретрансляции сигналов подавляемой РЛС.
По аналогии с РЛС, использующей ЛЧМ-сигналы, в РЛС с ФКМ-сигналами можно
ожидать эффективное действие радиопомех, создаваемых путем изменения фазы
ретранслированного сигнала. Радиопомеха, создаваемая путем задержки ФКМ-сигнала по
времени, будет проходить через дешифратор и создавать на выходе помеховый импульс,
задержанный от отраженного сигнала на время задержки в ретрансляторе. Изменение
частоты несущей на величину FP, значительно большую максимальной доплеровской
частоты целей, приводит к созданию помех каналу измерения дальности. Смещенные по
236
частоте помеховые сигналы создают помеховые импульсы, возникающие раньше и позже
полезного сигнала.
Передатчик ложных целей для РЛС с ЛЧМ. Цель имитационных помех – создать
ложную информацию путем внутриимпульсной амплитудной и частотной модуляции
ретранслируемого сигнала, приводящего к созданию ложных целей по дальности.
Подверженность РЛС с ЛЧМ воздействию ретрансляционной помехи связана с тем, что
отраженный сигнал от цели должен приниматься до того момента, как сформировался
сжатый импульс. Добавление в ретранслируемый сигнал, например, частотного сдвига
вызывает появление ложного импульса до или после отраженного (сжатого) от цели.
Достижимый при этом диапазон ошибок по дальности ограничивается пространственной
протяженностью рабочего импульса РЛС (до сжатия).
Радиолокационный сигнал РЛС с ЛЧМ принимается приемной антенной
передатчика, усиливается в СВЧ-усилителе, модулируется в нем по фазе с целью
обеспечения сдвига по частоте на определенную величину, проходит амплитудный
модулятор, где превращается из широкого импульса в серию узких импульсов,
усиливается в усилителе мощности и излучается через передающую антенну.
Синхронизация фазовой и амплитудной модуляции обеспечивается с помощью
управляющих импульсов, формируемых специальным генератором, работа которого
синхронизуется продетектированными импульсами РЛС. Управляющие импульсы
представляют собой сигналы пилообразной формы, подаваемые на фазовый модулятор, и
сигналы прямоугольной формы – для амплитудной модуляции.
За счет изменения частоты амплитудной модуляции, полярности и преобразования
частоты с помощью фазовой модуляции можно сформировать ложную цель,
расположенную на большей или меньшей дальности относительно дальности до
постановщика помех. Если отношение помеха-сигнал при этом достаточно велико, то
истинная цель может подавляться в приемнике РЛС, и оператор РЛС будет наблюдать
только ложную цель.
Поскольку обработка сигналов в приемниках РЛС может быть различной, выбор
параметров помеховой модуляции при формировании ложных целей должен
осуществляться на основании экспериментальных исследований на аналогах РЛС
противника или посредством моделирования. В ряде случаев представляется
целесообразным излучать ложные сигналы описанной структуры одновременно с
непрерывным шумом в пределах всей рабочей полосы частот. Если мощность шума
достаточна, чтобы замаскировать действительный отраженный сигнал от цели, то в этом
случае исключается возможность повторного захвата цели после срыва захвата,
вызванного действием ложной частотной информации.
Известно, что создание одиночных ложных целей на расстоянии порядка 1,5 км от
прикрываемой цели, как правило, не препятствует запуску ракеты. Поэтому
целесообразно создавать не менее двух ложных целей на различных дальностях и
осуществлять по программе уводы строба дальности на эти ложные цели. В этом случае
РЛС будет лишена возможности сопровождать по дальности движущуюся в пространстве
цель, возникнут большие ошибки слежения по дальности.
Один из методов защиты РЛС от имитационных помех рассмотренной структуры
сводится к изменению закона модуляции частоты от импульса к импульсу. В этом случае
передатчик ложных целей будет поочередно излучать помеховые импульсы, создающие
то опережающие, то запаздывающие ложные цели. В результате на индикаторе РЛС будут
наблюдаться импульсы, расположенные по обе стороны от полезного сигнала. При
симметричном законе ЧМ - сигнала РЛС ложные цели будут равноотстоящими по
временной оси от импульса цели. Это позволяет определять местоположение истинной
цели как середины между положениями ложных целей и выставлять следящий строб
дальности точно на место, где находится сигнал реальной цели.
237
Против описанной помехозащиты можно применить помеху с одинаковым
изменением частоты от импульса к импульсу, тогда на экране индикатора РЛС будет
создаваться только одна ложная цель (не парная) или с двойным изменением частоты в
каждом импульсе с использованием, например, балансного модулятора. В этом случае
возможно совмещение импульсной помехи с отраженным от цели импульсом, и при
достаточной мощности помехи может происходить подавление полезного сигнала в схеме
АРУ или ограничителе.
Имитирующие помехи РЛС с ЛЧМ сигналами могут создаваться путем
ретрансляции сигналов РЛС с задержкой по времени. Такая помеха проходит фильтр
сжатия точно так же, как и полезный сигнал. Если передатчик помех расположен на
прикрываемом самолете, то вначале на выходе фильтра сжатия появится сжатый по
длительности отраженный сигнал, а затем помеховый сигнал. Время задержки сжатого
помехового сигнала относительно сжатого отраженного сигнала будет равно времени
задержки помехового сигнала в ретрансляторе.
Имитационная помеха может быть создана также путем амплитудной модуляции
гармоническим колебанием и шумом. При амплитудной модуляции по гармоническому
закону с частотой fм и глубиной т помеха состоит из составляющей на несущей частоте и
двух боковых частот, отстоящих от несущей на величину ±fМ с амплитудой т/2.
Составляющая на несущей частоте будет ослаблять или усиливать действие отраженного
сигнала в зависимости от фазового сдвига, поэтому ее стараются, подавлять при
формировании помехи, две другие составляющие будут оказывать мешающее действие,
аналогичное смещению частоты на величину ±fМ. Если при модуляции используется
одновременно несколько гармонических составляющих, например п, то на выходе
фильтра сжатия будет создаваться 2n дополнительных сигналов. Но в этом случае
отраженный сигнал будет иметь амплитуду, превышающую амплитуду помеховых
составляющих, и помеховый эффект при большом п будет незначительным. Амплитудная
модуляция шумом приводит к образованию большого числа ложных отметок, воздействие
такой помехи будет эквивалентно действию маскирующей шумовой помехи.
Передатчик уводящих помех по дальности импульсной РЛС с ЛЧМ. Для
создания уводящих помех по дальности обычным импульсным РЛС широкое
распространение, как указывалось ранее, получил способ, основанный на применении
устройства кратковременного запоминания частоты на основе рециркулятора
радиоимпульсов. Однако применительно к подавлению РЛС с ЛЧМ этот способ не
обеспечивает увод строба дальности РЛС с внутриимпульсной частотной модуляцией,
потому что в рециркуляторе запоминается мгновенная частота передней части
радиолокационного импульса выборки, которая не совпадает с частотой остальной части
ЛЧМ - импульса. В результате этого в запомненном (рециркулированном) радиоимпульсе
отсутствует главное изменение частоты. Другой недостаток этого способа при его
использовании для создания уводящей помехи по дальности РЛС с ЛЧМ связан с
несогласованностью длительности радиолокационного импульса (десятки микросекунд) с
величиной задержки в рециркуляторе. В настоящее время в диапазоне СВЧ имеются
линии задержки на 0,5 мкс с приемлемой величиной затухания для аппаратурной
реализации.
Радиоэлектронное подавление активными радиопомехами
РЛС с квазинепрерывным излучением
Мерцающие помехи системам АСН
Мерцающими называют помехи, создаваемые системам АСН двумя и более
передатчиками, разнесенными в пространстве и работающими в прерывистом режиме
(рис. 2.49,а).
238
Если передатчики работают последовательно в соответствии с графиком рис.
2.49,б, то мерцающие помехи называются синхронными. Если же процессы включения и
выключения передатчиков осуществляются независимо, помехи называются
асинхронными.
Кроссполяризационные радиоэлектронные помехи системам
АСН
Кроссполяризационной помехой [4] называют радиосигнал, повторяющий полезный
по времени и спектральным характеристикам, но имеющий поляризацию, ортогональную
к поляризации сигналов подавляемой РЛС.
В простейшем случае этот вид помех создается методом ретрансляции сигнала
подавляемой РЛС с поворотом плоскости поляризации на 90° (рис. 2.52).
Ес
А прм
Нс
Пс
У
Нп
Еп
А прд
Пп
Рис. 2.52. Структурная схема станции кроссполяризационных помех
Здесь через ПС , НС , ЕС обозначены мгновенные значения векторов потока мощности
(Пойтинга), магнитной и электрической составляющих поля соответственно. Создание
данных помех возможно потому, что все линейно-поляризованные антенны наряду с
сигналами на основной поляризации принимают, хотя и с большим ослаблением (от 10 до
20, а при принятии специальных мер и до 30…40 дБ), сигналы с ортогональной
поляризацией (кроссполяризацией). Это связано с особенностями распределения токов,
наводимых полем в элементах антенны, появлением у этих токов составляющих,
ортогональных вектору ЕС поля, облучающего антенну.
Особенности подавления систем АСН многоцелевых РЛС
Развитие способов быстрого сканирования ДНА в пространстве позволило создать
многоцелевые РЛС, которые могут практически одновременно сопровождать несколько
целей по дальности, скорости и направлению. Прежде всего, это относится к РЛС с
фазированными антенными решетками (ФАР). В них путем изменения фазовых
соотношений сигналов излучателей можно за весьма короткое время порядка нескольких
микросекунд сориентировать ДНА в направлении на любую точку в пространстве обзора.
Последовательно направляя ДНА с одной цели на другую и удерживая ее в этом
направлении любое, наперед заданное время, измеряют координаты цели, на которую
направлена в данный момент диаграмма. Затем диаграмма направляется на другую цель и
т. д. Число таких целей может достигать нескольких десятков. Естественно, что такой
прерывистый режим работы РЛС отражается и на ее оценке как объекта РЭП [30].
Особенность РЛС (как объекта РЭП) состоит в том, что цель в каждом цикле
измерений облучается конечное время, то есть все системы АСЦ работают в дискретном
режиме [4]. Между циклами облучения цели ее координаты изменяются. Поэтому наряду
с автосопровождением в обычном понимании этого процесса в системе АСЦ
239
предусматривается экстраполяция (предсказание) изменения измеряемой координаты во
времени с использованием информации о ее значениях, полученных в предыдущих
циклах измерений. Дискретный характер облучения каждой цели уменьшает энергию
полезного сигнала, накапливаемую системой АСН, и тем самым снижает ее
помехоустойчивость. В самом деле, для облучения каждой из Nц, целей отводится время
Tобл ≤ Tобз / Nц, где Tобз – время, отводимое на облучение всех Nц сопровождаемых целей, т.
е. интервал дискретности работы каналов АСЦ.
Выбор Tобз ограничен как сверху, так и снизу. Ограничение сверху диктуется
необходимостью не допустить за время Tобз ухода цели из ДНА, а снизу – временем
установления процессов в каналах сопровождения каждой из целей.
Радиоэлектронное подавление систем военного назначения
с помощью компьютерных вирусов и электромагнитного оружия
Общие понятия о компьютерных вирусах и их основные
свойства
Широкое внедрение в военные электронные системы компьютерной техники, в том
числе в системы ПВО, привело к появлению нового типа РЭП, основанного на
использовании компьютерных вирусов, которые можно назвать компьютерным РЭП
(КРЭП). Сущностью данного типа РЭП [3] являются разработки и введение
радиоэлектронным способом в подавляемые системы таких программ (вирусов), которые
бы нарушали работу компьютерных систем, искажали рабочие программы таким
образом, что получаемые при этом результаты носили бы ложную информацию или
приводили к разрушению уже верной информации. Преднамеренное использование
компьютерных вирусов может привести к полному нарушению работы вычислительных
сетей и систем и, как следствие, к блокировке нормальной работы системы ПВО.
Основными характеристиками программ-вирусов являются [3]: компактность,
универсальность, способность к распространению, эффективность,
многофункциональность и устойчивость.
Компактность программ-вирусов способствует их распространению на другие
программы и усложняет их обнаружение.
Универсальность программ-вирусов заключается в том, что они способны
воздействовать на различные прикладные программы. Во многих случаях при этом даже
не требуется информация об инфицируемой программе.
Способность к распространению является неотъемлемой особенностью
программ-вирусов. С помощью инфицированной им программы он может
распространяться на другие программы и файлы, составляющие информационную
систему. В этом смысле компьютерный вирус ведет себя подобно биологическому
вирусу.
Эффективность программ-вирусов во многих случаях оказалась чрезвычайно
высокой. В результате их действия наступала полная потеря информации, выход из строя
программ и даже операционных систем.
Многофункциональность проявляется в разнообразии функциональных
особенностей программ-вирусов. Некоторые компьютерные вирусы просто поражают
прикладные программы, не затрагивая файлов данных и функций операционных систем.
Другие могут быть нацелены на нанесение ущерба или уничтожение файлов.
Эффективность программ-вирусов повышается вследствие того, что они могут себя не
проявлять до определенного момента времени (наступления определенного события).
Это позволяет вирусу выиграть время для распространения, пока пользователь
пораженной системы не обнаружит его присутствия.
240
Устойчивость программы-вируса состоит в том, что даже после обнаружения
устранение его является сложной проблемой, поскольку он способен повторно
распространяться по системе от единственной инфицированной копии.
Основное различие между традиционным РЭП и КРЭП в том, что РЭП
воздействует на элементы приемника подавляемой системы, а КРЭП – на процессоры
данной системы. По своей специфике КРЭП больше всего подходит для дезорганизации
тактических операций и в отличие от РЭП обладает свойством продолжения воздействия
на подавляемую систему после передачи сигнала помехи. При этом принципы создания
КРЭП открывают возможность воздействовать на объекты заблаговременно, тем самым
устраняя элемент неопределенности при разработке оперативно-тактических планов.
Компьютерный вирус обладает свойством инфекционности и способен
распространяться от системы к системе. После первоначальной имплантации эффект
действия КРЭП распространяется на широкий круг пользователей, что позволяет
осуществлять непрямое воздействие на интересующие объекты, т. е. посредством
воздействия на другие более доступные и менее защищенные объекты, входящие в
единую информационную систему. Программа-вирус может быть сориентирована на
поиск конкретных систем, в которых она может находиться в пассивном состоянии до
момента приведения в действие. Воздействие вируса может проявляться в различных
формах: незаметном изменении функций пораженной системы, полном выходе системы
из строя или в уничтожении файлов данных и программ.
Реализация КРЭП может быть скрытной. Вирусы могут распространяться и
поражать систему незаметно для пользователей. Не зная о воздействии помехи, объект
подавления не может принять своевременные меры по защите, т. е. внести изменения в
программу работы или оказать противодействие.
Реализуемость компьютерного РЭП
Для того чтобы являться эффективным средством РЭБ, КРЭП должно быть
надежным и целенаправленным. При наличии априорной информации об объекте
подавления программа-вирус может вводиться в него заранее. Вирус воздействует на
цифровые процессоры, распространяется и ожидает команды, чтобы стать активным.
При этом важное значение приобретает получение информации о том, что вирус достиг
места назначения и готов к действию. Такую информацию можно получить на
основании наблюдения за работой линий передачи или по получении
запрограммированных сообщений, предусмотренных в программе-вирусе.
Реализуемость КРЭП облегчается благодаря тенденциям развития
радиоэлектронных систем, связанных с возрастающим использованием: распределенной
цифровой обработки сигналов и данных; встроенных ЭВМ с изменяемой программой;
сетевых систем связи; стандартных ЭВМ; стандартного программного обеспечения;
стандартных линий передачи данных и форматов сообщений.
Все это диктуется снижением стоимости и упрощением техобслуживания
сложных систем, повышением их быстродействия и информативности. В то же время
возрастают возможности КРЭП, упрощается ввод программы-вируса.
Эффективность КРЭП [3] зависит от способности вируса распространяться и
инфицировать систему. В большинстве случаев в современных системах боевого
управлении, связи и разведки предусмотрены меры защиты от вмешательства
противника. Однако специфика КРЭП позволяет во многих случаях обойти эти меры.
Существует четыре типа ввода вируса в подавляемую систему:
непосредственный, посредственный, прямой и непрямой.
Непосредственный ввод предполагает использование среды, определяющей
функционирование подавляемой системы. Например, если подавляемой системой
является радиостанция тактического назначения, то при вводе вируса используются
радиосигналы, поступающие непосредственно в антенну и приемное устройство. В
241
системе боевого управления, связи и разведки вирус вводится непосредственно в
приемное устройство по линии управления и передачи данных в надежде, что приемник
отработает и, следовательно, имплантирует его. В результате распространения он будет
инфицировать все системы, связанные с пораженной системой. При этом достаточно
один раз преодолеть помехозащищенность системы в какой-то момент времени, чтобы
потом действовать в ней независимо от дальнейших изменений режимов работы,
увеличивающих помехозащищенность. Как известно, при реализации традиционного
РЭП эффективность обеспечивается только в момент преодоления помехозащищенности
приемника. Учитывая изложенное, КРЭП следует нацеливать на самое слабое звено в
системе помехозащищенности поражаемого объекта
Опосредственный ввод вируса в систему предполагает использование иной
среды, чем та, которая определяет ее назначение. Так, например, для ввода вируса могут
быть использованы системы питания, стабилизации, терморегулирования РЭА,
двигательные системы, прямо или косвенно электрически связанные с системойобъектом подавления.
Прямой ввод вируса предусматривает непосредственное воздействие на
интересующий процессор. Он может быть осуществлен, например, путем непрерывной
передачи программы-вируса во время приема подавляемым объектом нормальной
передачи. Но при этом можно столкнуться с эффективной помехозащитой объекта.
Непрямой ввод может оказаться более предпочтительным. Он рассчитан на
свойства инерционности вируса и предполагает использование для ввода программывируса наиболее уязвимого объекта, от которого вирус должен распространяться к
целевому объекту. При этом можно применять инструменты материально-технического
обслуживания и диагностики состояния интересуемой системы. Инфицируя контрольный
процессор вирусом, можно поразить другие процессоры, входящие в данную систему, и
тем самым достичь цели противодействия. Этот метод отличается простотой и высокой
эффективностью, поскольку очень трудно предусмотреть меры, препятствующие
распространению инфицированного вируса.
Существуют различные варианты применения КРЭП: «троянского коня»;
вынужденного карантина; перегрузки (насыщения); зондирования; целевого поражения.
Вариант «троянского коня» предусматривает ввод вируса в пораженную систему и
обеспечение пассивного его состояния до наступления установленного события или
момента времени. Достоинство состоит в том, что вирус бездействует определенное
время, не вызывая никаких подозрений.
Вариант вынужденного карантина предусматривает открытое внедрение в
систему. В результате пораженный узел (устройство) отключается оператором из
опасения распространения инфекции на другие узлы, что приводит к снижению
эффективности работы подавляемой системы.
Вариант перегрузки предусматривает многократное дублирование программывируса в целях снижения пропускной способности и быстродействия системы.
Вариант зондирования предусматривает ввод компьютерного вируса в сеть с
целью вывода из строя определенного файла, системы или другого объекта. В этом
случае вирус распространяется и самоуничтожается во всех пунктах, пока не найдет
целевой объект. После вывода из строя последнего программа-вирус самоуничтожается
окончательно, не оставляя следов.
Защита от компьютерного РЭП
Проблема защиты от КРЭП более серьезная, чем защита от РЭБ, поскольку
связана не только с защитой самого объекта, но и с защитой всех связанных с ним
объектов. Последнее обусловливается способностью вируса распространяться от узла к
узлу и от объекта к объекту. Стратегия защиты от КРЭП предусматривает [3]:
242
воспрещение доступа, включающее в себя ряд мер, препятствующих
проникновению вируса в систему;
обнаружение вируса, если вирус проник в систему;
локализацию вируса, сводящуюся к принятию мер для предотвращения его
распространения;
уничтожение (удаление) вируса до того, как он сможет нанести ущерб;
восстановление файлов данных, если вирусу удалось нанести им значительный
ущерб, используя для этого резервные копии файлов;
оперативное резервирование, предусматривающее варианты операций без вывода
из строя системы.
Реализация данной стратегии защиты, естественно, требует принятия
соответствующих мер в отношении аппаратурного и программного обеспечения, а также
выполнения условий строгого соблюдения правил эксплуатации и режимов работы.
В качестве аппаратурных мер защиты от КРЭП можно рекомендовать компактдиски и другие типы ЗУ, воспрещающие доступ к выполняемым программам;
электрическую изоляцию систем для предотвращения распространения вируса;
использование в комплексе процессоров различных типов.
В качестве программных мер защиты от КРЭП рекомендуется:
запрет доступа к центральным процессорным устройствам и программам,
выполняющим несанкционированные функции;
слежение за выполнением программ с целью обнаружения вируса; объединение
операционных систем для предотвращения распространения вирусов. В этом
случае вирус должен быть согласован с языком каждой системы; использование
антивирусных программ для ликвидации вирусов в инфицированных программах;
перегрузка программного обеспечения с целью дезинфекции. Инфицированные
программы и файлы стираются и восстанавливаются по чистым копиям.
При эксплуатации в целях защиты от КРЭП необходимо:
обеспечение строгого режима радиомаскировки; наблюдение за работой системы с
целью обнаружения вируса; разработка и соблюдение правил эксплуатации
системы, имеющих целью ограничить распространение вирусов в том случае, если
им удалось проникнуть в систему;
постановка в карантин инфицированных объектов для предотвращения
распространения вирусов;
разработка резервных планов на случай, если вирус нанесет серьезный ущерб.
Поскольку вирусы могут затаиваться среди миллионов строк рабочей программы и
проявлять себя в решающие моменты, меры защиты от них должны приниматься
до того, как противник получит возможность их использовать.
Общие понятия об электромагнитном оружии
Сущность электромагнитного оружия (ЭМО) [3] заключается в создании
кратковременных электромагнитных излучений большой мощности с целью воздействия
на радиоэлектронные устройства и выведения их из строя. Эффект действия такого
оружия обусловливается тем, что современные радиоэлектронные устройства насыщены
полупроводниковыми приборами и элементами, весьма чувствительными к
энергетическим перегрузкам. Поток электромагнитной энергии достаточно высокой
плотности мощности способен выжечь полупроводниковые переходы таких приборов,
полностью или частично нарушив их нормальное функционирование.
Наиболее легко повреждаются смесительные диоды радиолокационных и связных
приемников, маломощные МОП-структуры логических элементов и даже
полупроводниковые приборы электронных систем зажигания двигателей внутреннего
сгорания.
243
Выход из строя полупроводниковых приборов вызывается обычно их перегревом
электромагнитной энергией из-за малых размеров полупроводниковых переходов.
Напряжение пробоя переходов невысокое и составляет величину от единиц до
десятков вольт в зависимости от типа прибора. Так, для кремниевых высокоточных
биполярных транзисторов, обладающих повышенной прочностью к перегревам,
напряжение пробоя меняется от 15 до 65 В. У арсенид-галлиевых полупроводниковых
приборов этот порог составляет 10 В. Устройства памяти с произвольным доступом,
составляющие существенную часть любого компьютера, обычно имеют пороговые
напряжения примерно 7 В. Типовые логические ИС на МОП-структурах – от 7 до 15 В, а
микропроцессоры обычно прекращают свою работу при напряжениях 3,3...5 В.
Помимо разрушения полупроводниковых элементов электромагнитный импульс
при среднем уровне плотности мощности может вызвать парализацию электронного
устройства, сущность которой заключается в потере работоспособности на определенный
интервал времени. Это может происходить от перегрузок приемоусилительных
устройств, приводящих к потере их чувствительности, и от процессов восстановления
нормального состояния функционирования. При этом разрушения (необратимого
выхода из строя) полупроводниковых элементов не происходит.
Электромагнитное оружие в настоящее время рассматривается как одно из
наиболее эффективных средств ведения информационной борьбы. Это обусловливается
значимостью информационных потоков в различных сферах деятельности, включая
управление экономикой, производством, обороной страны. Информационная система
предусматривает постоянный обмен управленческими решениями и сообщениями о их
выполнении. В ее состав практически включается множество радиоэлектронных
устройств сбора и обработки информации, нарушение функционирования которых
разрушает систему со всеми вытекающими из этого последствиями.
Так, при ведении боевых операций первостепенное значение приобретают
средства связи и целеуказания. Для сбора необходимой информации и ее использования
применяют радиолокационные станции различного назначения, системы командования,
управления и связи, радио и радиотехническую разведку. Все эти средства представляют
собой объекты воздействия электромагнитного оружия, поражение которых приведет к
дезинформации информационной системы, к снижению эффективности или полному
нарушению работы системы ПВО и ПРО.
По характеру действия электромагнитное оружие может рассматриваться как
оружие массового поражения радиоэлектронных средств. В соответствии с этим при
планировании боевых операций уделяется большое внимание его применению на
начальном этапе боевых операций, предшествующем широкомасштабному наступлению.
Пути проникновения электромагнитного импульса в
радиоэлектронную аппаратуру
По спектральным характеристикам ЭМО можно разделить на два вида:
низкочастотное, создающее электромагнитный импульс (ЭМИ) со спектром на
частотах ниже 1 МГц, и высокочастотное (микроволновое), обеспечивающее
электромагнитное воздействие в СВЧ-диапазоне [3]. Оба эти вида также различаются по
технике реализации и в какой-то мере механизму воздействия на радиоэлектронные
устройства.
Проникновение низкочастотного электромагнитного импульса на элементы
радиоэлектронного устройства обусловливается в основном наводками на элементы
устройства и особенно на каналы внешнего питания, подачи и съема информации. Пути
проникновения электромагнитного поля СВЧ-диапазона более обширные, они включают
не только элементы наводки электромагнитного поля, но и прямое проникновение в
радиоэлектронную аппаратуру через антенную систему, поскольку спектр СВЧ-поля
охватывает рабочую частоту подавляемой аппаратуры. Энергия СВЧ также может
244
проникать через отверстия и стыки в корпусах аппаратуры. В первом случае величина
проникающей энергии будет максимальной в рабочем диапазоне антенны.
Проникновение энергии через отверстия и стыки зависит от их размеров и длины волны
электромагнитного импульса. В этом случае существуют сильные резонансные явления
на различных частотах. Очевидно, наиболее сильная связь наблюдается на резонансных
частотах отверстий корпуса, то есть в том случае, когда длина волны соизмерима с
размерами отверстий. Связь резко уменьшается на волне, длиннее резонансной волны
отверстий. Поэтому воздействие низкочастотного электромагнитного оружия в
значительно меньшей степени связано с наводками через отверстия и стыки в корпусе
аппаратуры. На частотах выше резонансной частоты наблюдается более медленный спад
степени связи. Но за счет множества типов колебаний в объеме корпуса аппаратуры
возникают острые резонансы.
Если поток СВЧ-энергии достаточно интенсивен, то воздух в отверстиях и стыках
ионизируется и становится хорошим проводником, экранирующим от проникновения
электромагнитной энергии. Учитывая это, увеличение падающей на объект энергии
может привести к уменьшению электромагнитной энергии, воздействующей на
аппаратуру и, как следствие, к снижению эффективности воздействия ЭМИ.
Реализация электромагнитного оружия
Техника реализации низкочастотного электромагнитного оружия [3].
Генерация электромагнитного импульса и его действие наблюдались при первом
высокоатмосферном ядерном взрыве. Эффект характеризовался возникновением очень
короткого (сотни наносекунд), но интенсивного электромагнитного импульса,
порождавшего мощное электромагнитное поле, действовавшее на электромагнитные
устройства различных типов. Наносимые при этом повреждения были схожи с
повреждениями от ударов в непосредственной близости к аппаратуре электрических
молний.
Экранирование электронных устройств при этом обеспечивает только частичную
защиту, так как любой кабель (провод), идущий к аппаратуре или выходящий из нее,
уподобляется антенне и передает кратковременные воздействия на аппаратуру.
Компьютеры, использующиеся в системах обработки данных, системах связи, дисплеях,
управляющих производственных системах, включая шоссейную и железнодорожную
сигнализации, РЛС, электронное военное оборудование, спутники, аппаратура связи
УВЧ, ОВЧ, ВЧ и низких диапазонов и телевизионная аппаратура – все является
потенциально уязвимым по отношению к электромагнитному импульсу.
Основным техническим средством реализации мощных электромагнитных
импульсов, составляющих основу низкочастотного электромагнитного оружия, в
настоящее время является генератор с взрывным сжатием магнитного поля,
обеспечивающий создание электрической энергии в десятки мегаджоулей в промежутки
времени от десятков до сотен микросекунд. При этом уровень развиваемой пиковой
мощности достигает единиц и десятков тераватт, а производимый генератором ток в
10...1000 раз превышает ток, порождаемый типовым разрядом молнии.
Устройство и принцип действия генератора иллюстрируется рис. 2.64. Генератор
состоит из ротора и статора. В представленном варианте генератора коаксиального типа в
качестве ротора используется цилиндрическая медная трубка, заполненная взрывчатым
веществом. Статор генератора формируется спиралью из прочного (обычно медного)
провода, окружающей ротор. В целях оптимизации электромагнитной индукции в роторе
статорная обмотка иногда делится, на секции.
Первоначальное магнитное поле в генераторе, предшествующее взрыву,
формируется стартовым током статора. При этом может использоваться любой внешний
источник, способный обеспечить импульс электрического тока силой от единиц
килоампер до мегаампер.
245
Во избежание преждевременного разрушения генератора поверх статорной
обмотки устанавливается кожух из немагнитного материала (обычно цемента или
стекловолокна совместно с эпоксидной смолой).
а
б
Рис. 2.64. Схема устройства генератора с взрывным сжатием магнитного поля
Подрыв взрывчатого вещества происходит с помощью специального генератора в
момент, когда ток в статорной обмотке достигает максимума. Образующийся при этом
плоский однородный фронт взрывной волны распространяется вдоль взрывчатого
вещества, деформируя структуру ротора, превращая ее из цилиндрической в коническую
форму. В момент расширения трубки ротора до размеров статора происходит короткое
замыкание статорной обмотки, приводящее к эффекту сжатия магнитного поля
генератора и возникновению мощного импульса тока величиной порядка нескольких
десятков мегампер. Степень возрастания выходного тока по сравнению со стартовым
током зависит от конструкции генератора и может достигать нескольких десятков.
246
Другим типом источника низкочастотной электромагнитной энергии большой
мощности является магнитогидродинамический генератор (МГД), приводимый в
действие с помощью ракетного топлива или взрывчатки. Основой работы данного
генератора является возникновение тока в проводнике, движущемся в магнитном поле.
Только в качестве проводника используется плазма, состоящая из ионизированного
взрывчатого вещества или газообразного топлива, движущаяся сквозь магнитное поле.
Однако данный тип генератора к настоящему времени меньше проработан, чем
генератор с взрывным сжатием магнитного поля, и потому имеет пока меньшие
перспективы широкого применения в боевых электромагнитных средствах.
Реализация низкочастотного электромагнитного оружия в эффективном варианте
требует больших антенн, поскольку ее максимальная излучаемая мощность лежит в
диапазоне частот ниже 1 МГц. Решением этой проблемы может быть применение
катушек с намотанными на них кабелями, выбрасываемыми в момент взрыва
электромагнитной бомбы, или достаточно точная доставка боевого средства к месту
расположения подавляемого объекта. В последнем случае наводка электромагнитного
импульса на радиоэлектронные устройства объекта может осуществляться
непосредственно за счет обмотки электромагнитного генератора и будет тем сильней, чем
ближе к объекту располагается этот генератор.
Техника реализации СВЧ-энергии высокой мощности [3]. В качестве
генератора СВЧ-излучения могут использоваться различные электронные приборы,
начиная от широко известных магнетронов и клистронов и кончая новыми приборами
— генератором с виртуальным катодом (зиркатором), гиротроном, лазером на свободных
электронах и плазменным лучевым генератором. Все эти приборы обладают
способностью преобразовывать кинетическую энергию электронного пучка в
электромагнитную энергию СВЧ-диапазона.
Существующие лабораторные источники мощности СВЧ-излучения способны
работать как в импульсном (длительностью 10 нс и более), так и в непрерывном режимах
и перекрывать диапазон от 500 МГц до десятков ГГц при частотах повторения от единиц
до тысяч импульсов в секунду. Максимальная генерируемая при этом мощность
достигает уровня нескольких мегаватт (при непрерывном режиме) и нескольких гигаватт
(при импульсном режиме). Разумеется, различные типы генераторов в пределах
указанных параметров не являются одинаковыми. Так, гиротроны работают в
миллиметровом диапазоне волн с высоким КПД, а варакторы – в сантиметровом
диапазоне и имеют меньший КПД. Для тактического СВЧ-оружия крайне важно, чтобы
генераторы были или достаточно широкополосными, или перестраивались в пределах
декады. Наибольшей широкополосностью обладают плазменно-лучевые приборы, а легче
всего перестраиваются по частоте – виркаторы. На рис. 2.65 показана схема виркатора с
соосным виртуальным катодом. По своей конструкции этот виркатор представляет собой
круглый волновод, переходящий в конус. Катод представляет собой металлический
цилиндрический стержень диаметром несколько сантиметров, анодом является
натянутая на обод металлическая сетка. При подаче на анод положительного потенциала
порядка 105... 106 В вследствие взрывной эмиссии с катода поток электронов устремляется
к аноду и проходит через него в пространство за анодом, где тормозится собственным
кулоновым полем и отражается обратно к аноду, образуя виртуальный катод на
расстоянии от анода, примерно равном расстоянию от него до реального катода.
Отраженные электроны проходят сквозь сетку анода и вновь тормозятся у поверхности
реального катода. В результате формируется облако электронов, осциллирующее у анода
в потенциальной яме между виртуальным и реальным катодами. На частоте колебаний
облака электронов возбуждается СВЧ-поле, которое излучается в пространство через
диэлектрическое окно.
247
Рис. 2.65. Схема виркатора с соосным виртуальным катодом
Стартовые токи в виркаторах, при которых возникает генерация, составляют
1... 10 кА, а выводимая СВЧ-мощность достигает единиц гигаватт.
Особенности физических процессов, возникающих в виркаторах, делают их
наиболее приемлемыми для генерации импульсов наносекундной длительности в
длинноволновой части сантиметрового диапазона. Экспериментально от виркаторов
получены уровни мощности от 170 кВт до 40 ГВт в сантиметровом и дециметровом
диапазонах.
Недостатком виркаторов является низкий КПД, составляющий примерно 1 %, что
обусловливается многомодовым характером генерируемого в них электромагнитного
поля и интерференцией между модами. Преимущество высокочастотных устройств перед
низкочастотными – возможность фокусирования генерируемой ими энергии в
направлении цели с помощью достаточно компактных антенных систем с механическим
или электронным управлением.
При необходимости поражения одновременно нескольких целей можно
использовать ФАР, позволяющие быстро менять положение луча и формировать
одновременно несколько лучей. Но при этом следует учитывать допустимые уровни
электромагнитного излучения, на которых сказываются эффекты, связанные с
электрическими пробоями в атмосфере. Ограниченная электрическая прочность воздуха
устанавливает границу плотности потока СВЧ-энергии. Экспериментально установлено,
что значение плотности потока СВЧ-энергии, при котором наступает диэлектрический
пробой в воздухе, меняется с частотой, длительностью импульса, давлением воздуха и
плотностью свободных электронов, с которой начинается лавинный процесс пробоя. При
их наличии и нормальном атмосферном давлении пробой начинается при плотностях
мощности 105...106 Вт/см2, если длительность импульса СВЧ-излучения больше
наносекунды. Но для наступления пробоя, требуется время, необходимое для того, чтобы
свободные электроны успели поглотить достаточное для начального пробоя количество
СВЧ-энергии. В соответствии с этим фактором пробой наступает лишь в конце мощного
СВЧ-импульса.
При выборе рабочей частоты СВЧ-излучения учитываются также условия
распространения электромагнитных волн в атмосфере. Известно, что СВЧ-излучение
поглощается в атмосфере водяным паром, молекулами кислорода и осадками. Пики
резонансного поглощения водяным паром приходятся на частоты 22 и 185 ГГц, а для
248
молекул кислорода – на частоты 60 и 118 ГГц. В пределах дальности действия
тактического оружия (.1...100 км) и на малых высотах поглощение в диапазоне
нескольких гигагерц на этих резонансных частотах может быть недопустимо большим.
Поглощение осадками возрастает с частотой. Так, на частоте 3 ГГц излучение
ослабляется на расстоянии 10 км при умеренном дожде на 0,01 дБ, но на частоте 30 ГГц
при тех же условиях оно уже возрастает до 10 дБ.
Таким образом, выбор рабочей частоты излучения СВЧ-оружия зависит от
требований дальности действия и всепогодности его применения.
Тактика применения электромагнитного оружия
Электромагнитное оружие может применяться как в стационарном, так и в
мобильном вариантах [3].
При стационарном варианте облегчается выполнение массогабаритных и
энергетических требований к аппаратуре, упрощается ее обслуживание. Но при этом
требуется обеспечение высокой направленности электромагнитного излучения только в
сторону цели во избежание поражения собственных радиоэлектронных устройств этим
излучением. Это можно обеспечить только применением остронаправленных антенных
систем. В случае реализации СВЧ-излучения использование остронаправленных антенн
не составляет проблемы, чего нельзя сказать при реализации низкочастотного ЭМО.
В этом отношении мобильный вариант реализации ЭМО имеет ряд преимуществ.
Прежде всего, легче решается проблема защиты собственных радиоэлектронных
средств от воздействия ЭМО, поскольку боевое средство может быть доставлено
непосредственно к месту расположения объекта, подлежащего воздействию, и только там
приведено в действие. Удаленность цели от места расположения собственных
радиоэлектронных средств будет гарантировать безопасность последних от губительного
действия ЭМО.
Упрощаются проблемы с излучением электромагнитной энергии, поскольку в
этом случае отпадает необходимость применения направленных антенных систем, а в
ряде случаев вообще можно обойтись без них, ограничившись непосредственной
электромагнитной связью, возникающей между генератором ЭМО и электронными
устройствами противника в связи с их близким расположением друг к другу. Но при
мобильном варианте, конечно, возникают и некоторые затруднения в удовлетворении
массо-габаритных и энергетических требований к аппаратуре, но они вполне
преодолеваются.
Средствами доставки ЭМО в мобильном варианте могут быть самолеты,
вертолеты, ракеты, корабли. При этом предполагается наличие соответствующей
информации о целях, подлежащих электромагнитному воздействию. В сборе такой
информации важная роль отводится средствам РТР. Подавляющее большинство
интересующих целей в процессе функционирования излучают радиоволны, обладающие
определенными характеристиками, позволяющими не только их идентифицировать, но и
устанавливать их местоположения с достаточной точностью. Это позволяет
разрабатывать системы обнаружения, опознавания и пеленгации таких источников
излучения в целях выведения на них боевых средств ЭМО.
При использовании самолетов (вертолетов) эффективным средством доставки
ЭМО к цели является планирующая бомба. Ее можно запустить с дальности,
превышающей дальность действия системы ПВО противника, что минимизирует риск
поражения самолета средствами ПВО противника и риск повреждения бортовых
радиоэлектронных устройств электромагнитным воздействием бомбы при ее взрыве.
При этом автопилот планирующей бомбы может быть запрограммирован так, что
профиль полета бомбы к цели и высота ее подрыва будут оптимальными с точки зрения
достигаемого эффекта применения ЭМО.
249
В настоящее время разработано снаряжение по точному наведению обычных и
планирующих бомб с применением глобальной спутниковой навигационной системы.
Для доставки средств ЭМО могут быть использованы также беспилотные летательные
аппараты, оснащенные соответствующей аппаратурой обнаружения источников
излучения и наведения на них средств ЭМО.
Электромагнитные боеголовки могут также доставляться к цели с помощью
крылатых ракет, оснащенных аккумуляторными устройствами электроэнергии для
обеспечения приведения в действие ЭМО. Момент срабатывания ЭМО тесно связан с
определенными датчиками носителей. При размещении на крылатой ракете – с датчиком
навигационной системы, при размещении в противокорабельной ракете – с
радиолокационной головкой наведения, а при размещении на ракете «воздух-воздух» –
непосредственно с системой взрывателя. Подрыв бомбы в воздухе может быть
осуществлен с помощью радиолокационного высотомера, барометрического устройства
или глобальной навигационной системы.
Защита от электромагнитного оружия
Наиболее эффективной защитой от ЭМО конечно является предотвращение его
доставки путем физического уничтожения носителей, как и при защите от ядерного
оружия. Однако это не всегда достижимо и всегда будет иметь место прорыв отдельных
носителей ЭМО через систему ПВО и ПРО, особенно при массовом применении средств
ЭМО. Поэтому наряду со средствами перехвата и уничтожения носителей ЭМО следует
прибегать к мерам электромагнитной защиты непосредственно самой радиоэлектронной
аппаратуры.
К таким мерам прежде всего следует отнести полную экранировку самой
аппаратуры, а также экранировку помещений, где эта аппаратура размещается. Это
неизбежно приведет к снижению электромагнитных наводок и их поражающего действия
на полупроводниковые элементы аппаратуры. Если помещение уподобится известной
клетке Фарадея, предотвращающей проникновение внешнего электромагнитного поля,
то защита аппаратуры от ЭМО будет полностью обеспечена.
Однако реально такая защита не может быть обеспечена, поскольку аппаратура
нуждается в подводке питания извне и должна иметь каналы связи, по которым должна
поступать информация и результаты обработки этой информации. Иными словами,
защищаемая аппаратура не может по своим функциональным характеристикам
полностью изолироваться от внешнего мира, и это усугубляет проблему ее защиты от
ЭМО. Наряду с экранировкой помещений и самой аппаратуры необходимо
обеспечивать также защиту всех внешних связей аппаратуры от проникновения через
них к аппаратуре электромагнитного воздействия. Такой защитой являются фильтры. Но
они обычно защищают только в определенной полосе частот и соответствующим
образом настраиваются. Учитывая широкополосность электромагнитных излучений,
создаваемых ЭМО, обеспечить полную и надежную защиту с помощью фильтров вряд ли
возможно. Хорошей защитой от электромагнитных наводок по проводам, идущим к
аппаратуре, является замена их на волоконно-оптические каналы. Но это неприменимо к
цепям электропитания.
Проблема защиты от ЭМО усугубляется и тем, что развитие современной
информационной системы идет по пути дезинтеграции. Вместо больших центров по
приему и обработке информации предпочитают иметь в каждом учреждении свои
компьютерные системы, которые в целях оперативного взаимообмена информацией
соединяются соответствующими каналами связи, используя при этом часто глобальную
информационную систему Интернет. Такая децентрализация радиоэлектронной
аппаратуры и взаимосвязи является основным фактором уязвимости радиоэлектронных
средств по отношению к ЭМО, в результате чего применение ЭМО в военных
конфликтах становится еще более перспективным.
250
3. РАДИОЭЛЕКТРОННАЯ МАСКИРОВКА
3.1. Методы радиоэлектронной маскировки
3.1.1. Общие положения
Радиоэлектронная маскировка - это комплекс технических и организационных
мероприятий, направленных на снижение эффективности средств радио-,
радиотехнической и радиолокационной разведок противника [20]. Она применяется для
снижения заметности объектов средствами радиоэлектронных разведок различных
классов и назначений [19].
Можно выделить три основных источника электромагнитного излучения (ЭМИ),
наличие которых позволяет приемникам средств разведки обнаружить и выделить на
фоне помех сигналы, создаваемые разведываемыми объектами в разных частотных
диапазонах:
1. Электромагнитные поля радиоэлектронных систем и средств (РЭС),
расположенных на объекте. Их излучение подразделяется на основное, попадающее в
рабочую полосу частот и в главный лепесток диаграммы направленности передающей
антенны (ДН), и побочное - излучение на частотах вне спектра передаваемого сигнала и в
боковых лепестках ДН. Кроме основного и побочного излучения радиопередающих
устройств через передающие антенны, происходит и несанкционированное излучение
РЭС. Несанкционированное излучение возникает в процессе работы радиоприемных
устройств (прежде всего, через излучение гетеродинов), вычислительных систем,
информационных систем типа кабельных линий связи и передачи данных [19].
2. Электромагнитное излучение объектов, возникающее за счет рассеяния энергии
падающих радиоволн, создаваемых внешним по отношению к самому объекту
излучателем (радиолокационной станцией, например).
3. Электромагнитное излучение, возникающее в результате взаимодействия
движущегося объекта с внешней средой. Так образуется свечение (излучение в видимой
части спектра электромагнитных волн) плазмы в зоне ударной волны уплотнения,
которую создает перед собой летательный аппарат в атмосфере. Нагревание поверхности
летательного аппарата, из-за трения о воздух, сопровождается низкочастотным
излучением ИК-диапазона и радиодиапазона. Эти излучения позволяют обнаруживать
объекты средствами инфракрасной и радиотепловой разведки. Трение корпуса о воздух и
трение газов, выбрасываемых в процессе сгорания топлива из реактивных двигателей,
приводит к электризации корпуса летательного аппарата (ЛА).
Приведенные демаскирующие факторы и определяют основные направления и
средства радиоэлектронной маскировки объектов.
Поскольку прием радиосигналов всегда производится на фоне помех той или иной
интенсивности, в условиях изменения параметров среды распространения и действия
других непредсказуемых факторов, то в качестве характеристики заметности объектов
используют вероятность обнаружения сигнала системами разведки. Это условная
вероятность правильного решения о наличии сигнала на входе приемника при условии,
что этот сигнал действительно присутствует.
3.1.2. Пассивные помехи
В этой связи одним из основных маскирующих средств является постановка
маскирующих и имитирующих помех, создающих ложную информацию системам
целераспределения, наведения и самонаведения. Это, как правило, пассивные помехи,
нетребующие применения передатчиков помех.
251
Пассивные помехи [20] - это сигналы, поступающие на вход РЭС противника в виде
электромагнитных полей, рассеянных естественными или искусственными отражателями.
Любое тело с электрическими параметрами, отличными от параметров окружающей
среды, является отражателями электромагнитных волн. Все облучаемые РЛС объекты,
кроме цели, являются источником рассеянных электромагнитных полей, создающих
пассивные помехи. Интенсивность рассеяния волн зависит от размеров, конфигурации
объекта и электрических свойств материала, из которого он изготовлен. Различают
естественные
и
искусственные
помехи.
Естественные
помехи
создаются
электромагнитными полями, рассеянными земной поверхностью (для низколетящих
воздушных целей, наземных и надводных целей), неоднородностями атмосферы
(например, метеоосадками), различного рода строениями и другими непреднамеренными
образованиями. Искусственные помехи возникают за счет полей рассеяния
преднамеренно созданными различного рода отражателями: дипольными, уголковыми,
линзовыми, а также искусственными ионизированными и аэрозольными образованиями.
Пассивные помехи могут создаваться только тем РЭС, которые обнаруживают
цели по рассеянным ими электромагнитным волнам [19].
Создаваемые пассивные помехи (ЭМП, рассеянные искусственными объектами и
отражающими средами) могут практически не отличаться от электромагнитных полей,
рассеянных реальными целями (ракетами, танками, самолетами, кораблями). Рассеянные
множеством отражателей, они могут вызывать засветку различных частей экранов
приемника разведывательных РЭС и маскировать на их фоне реальные цели. Ложные
отметки существенно затрудняют наблюдение и распознавание реальных целей и
нарушают работу автоматических систем передачи данных и управления. При большом
количестве и близком расположении ложных целей их изображения сливаются, образуя
на экране индикатора светящееся пятно, которое маскируют данные об истинных целях.
Наиболее распространенным средством создания пассивных помех ещё со времен
Второй мировой войны являются дипольные отражатели (ДО).
Пассивные помехи образуют маскирующий фон и в этом смысле они аналогичны
шумовым помехам.
3.1.3. Ложные цели и ловушки
К эффективным средствам РЭБ относятся и так называемые ложные
цели и ловушки [20], предназначенные для имитации реальных защищаемых объектов.
Они, как правило, выпускаются при преодолении ПВО противника с летательных
аппаратов или с земли. При этом достигаются следующие результаты:
дезориентация операторов РЛС и перегрузка вычислительных устройств контура
(системы обработки информации);
увеличение времени на опознавание образа цели (определение истинных целей);
отвлечение ударных средств ПВО (истребителей, ракет) на поражение ложных
целей.
Ложная цель [19] представляет собой устройство, имитирующее рассеивающие
свойства реальных объектов, подлежащих противорадиолокационной маскировке. Они
создают на экране приемника радиоразведки (например, РЛС) такие же отметки, что и
реальная цель, и служат для их маскировки, противодействуя РЭС обнаружения и
целеуказания. В качестве ложных целей используют, как правило, радиолокационные
отражатели, обладающие повышенными рассеивающими (электромагнитные волны)
свойствами (уголковые и линзовые отражатели, как одиночные, так и в составе групп,
например, решетки Ван-Атта).
Ложные цели, предназначенные для срыва автосопровождения цели и головки
самонаведения ракет [20], называются ловушками. Ложные цели и радиолокационные
ловушки могут функционировать, как за счет пассивных отражателей, так и активных
ретрансляторов. Кроме того, на них зачастую устанавливаются и передатчики помех, в
252
этом случае создаваемые ими помехи будут уже активными. Эффективность ложных
целей может быть оценена снижением вероятности поражения прикрываемых самолетов.
3.1.4. Снижение заметности объектов
Важнейшим направлением маскировки считается снижение заметности объектов,
то есть уменьшение вторичного (отраженного, рассеянного) излучения радиолокационных
целей, которое не связано с работой собственных РЭС маскируемых объектов, а возникает
за счет взаимодействия объектов с полями радиолокационных станций противника.
Методы снижения отраженного сигнала иначе называются методами уменьшения
эффективной поверхностью рассеяния (ЭПР). Уменьшения ЭПР осуществляют в
настоящее время двумя основными способами, применяемыми как порознь, так и
совместно (как правило, в авиации): во-первых – за счет выбора малоотражающей формы
радиолокационной цели, во-вторых - применением специальных поглощающих
электромагнитные волны противорадиолокационных покрытий.
3.1.5. Маскировка объектов
Для маскировки объектов могут также применяться целенаправленные воздействия
на среду распространения электромагнитных волн, в результате которого одна часть
энергии электромагнитного поля может преобразовываться в кинетическую энергию
движущихся заряженных частиц, а другая часть - рассеиваться элементами
модифицированной среды распространения сигнала по направлениям, отличным от
направлений на РЭС разведки.
Из всего многообразия средств радиопротиводействия (РПД) можно выделить
следующие виды пассивных (не требующие применения передатчиков) помех:
пассивные помехи;
ложные цели и ловушки;
противорадиолокационная маскировка;
средства, изменяющие электрические свойства среды.
В конечном итоге эффективность описанных пассивных средств радиомаскировки
оценивается их характеристиками рассеяния.
3.2. Радиолокационные характеристики объектов
3.2.1. Рассеянное поле
Рассеяние электромагнитных волн различными телами (рис. 3.1) [31] обусловлено
возникновением в них под действием внешнего поля ( Ei , H i ) индуцированных
свободных (на проводниках) и связанных (в диэлектриках) электрических зарядов,
которые в нестационарном случае (в случае переменных во времени процессов) приводят
к появлению переменных токов, и как следствие, рассеянного электромагнитного поля (
E r , H r ). При проведении измерений ЭМП фиксируют полное поле:
(3.1)
E Ei E r ; H H i H r .
Рассеянное поле ( E r , H r ) можно определить либо расчетным путем, либо
экспериментально. Экспериментальное определение рассеянного поля возможно
следующим образом:
1) облучением тела короткими радио (или видео) импульсами с последующей селекцией
отраженного сигнала по времени его прихода к приемной антенне;
2) использованием направленных антенн в приемной и передающей частях
измерительного стенда, обеспечивающих необходимый для требуемой точности
измерений уровень развязки;
253
3) использование эффекта Доплера при измерениях (измерение рассеянного поля от
движущегося объекта);
4) использование при измерении методов компенсации первичного поля (падающей
волны). В этом случае вначале проводят измерения падающего поля (полного поля в
отсутствии объекта – фона), а затем из полного поля, измеренного в присутствии
объекта, вычитают ранее измеренное падающее поле
E r E Ei ; H r H H i .
Каждый из указанных методов позволяет произвести измерения рассеянного поля с
той или иной степенью точности. Точность измерений обусловлена в большой степени
совершенством используемой аппаратуры.
3.2.2. Теневое рассеянное поле
В радиолокации в рассеянном поле принято выделять так называемую теневую
составляющую (тенеобразующее рассеянное поле) [31]. Это поле характерно для тел
больших электрических размеров (характерный размер которых значительно превышает
длину волны падающего поля). В этом случае за телом (в направлении противоположном
направлению падения волны) возникает тень той или иной интенсивности - чем больше
поперечный размер тела, тем с большей точностью в этом направлении можно положить
E Ei Er 0 ,
то есть можно считать, что в зоне тела существует теневое рассеянное поле E rt равное, но
противоположное по фазе падающей волне
(3.2)
E rt Ei .
Таким образом, рассеянное поле ( E r , H r ) можно представить в виде суперпозиции
двух полей: теневого ( E rt , H rt ) рассеянного поля (3.2) и собственного рассеянного поля (
Err , H rr )
Er Err Ert ; H r H rr H rt .
(3.3)
Для больших по сравнению с λ тел собственное рассеянное поле E rr , H rr , как
правило, является определяющим в передней полусфере и практически отсутствует
вблизи направления =π, в то время как теневое поле Ert, наоборот, концентрируется в
задней полусфере вблизи направления =π и практически отсутствует в передней
полусфере. Иными словами, рассеянные и теневые поля больших тел чаще всего
разнесены в пространстве. Если же размеры рассеивающего тела сравнимы с длиной
волны или меньше её, то указанные поля уже так явно не разделены в пространстве, а
интерферируют друг с другом.
3.2.3. «Черное» тело
Реальные рассеивающие тела (особенно СТЕЛС-объекты) не только рассеивают
электромагнитные поля, но и поглощают. Под стелс-технологиями теперь подразумевают
[33] комплекс технических решений, в результате которых уменьшается уровень
сигналов, поступающих от военного объекта на приемные системы, пытающиеся объект
обнаружить
и
уничтожить.
Эти
сигналы
переносятся
акустическими
и
электромагнитными волнами в широком спектре частот. Задача стелс-технологии
заключается в максимально возможном уменьшении радиолокационной заметности
объекта. Стелс-технология включает в себя следующие основные направления: теорию
дифракции на сложных телах, разработку и исследование радиопоглощающих
материалов, технологию нанесения покрытий и, наконец, радиофизический эксперимент,
используемый для контроля в каждом из перечисленных направлений.
Очевидно, что чем сильнее поглощает электромагнитную энергию тело, тем
меньше оно рассеивает. Для оценки потенциально достижимых уровней поглощения и
254
рассеяния волн в радиолокационных отражателях и объектах вводят понятие абсолютно
черного тела. Современные радиопоглощающие материалы по своим свойствам весьма
близки к идеально поглощающим, по крайней мере, в ограниченной полосе частот и
секторе углов [34]. Для описания свойств отражателей, как правило, используются
параметры установившегося режима или параметры в частотной области [31].
Согласно определению [35], «черным» телом называют объект, который полностью
поглощает энергию падающего на него поля. В настоящее время существует несколько
моделей «черного» тела. Это модели: Кирхгофа, Коттлера, Макдональда, Зоммерфельда и
др. Все эти модели, математические и физические, объединяет общее требование
отсутствия отражения от поверхности черного тела [34]. Поэтому скажем несколько слов
только о математической модели Кирхгофа.
Кирхгоф сделал предположение, что на освещенной части поверхности черного
тела полное поле (наведенное – падающее плюс рассеянное) равно падающему, что
эквивалентно отсутствию отражений от него, а на теневой части - оно (полное поле) равно
нулю (что соответствует непрозрачному для ЭМВ телу).
Отсутствие полного поля на теневой части поверхности черного тела заставляет
признать, что за таким абсолютно черным телом больших по сравнению с длиной волны
размеров существует теневое рассеянное поле (3.2). Собственное рассеянное поле E rr ,
H rr черного тела в соответствии с моделью Кирхгофа должно отсутствовать.
То есть для абсолютно черного тела справедливы равенства
E r E rt ; H r H rt .
(3.4)
Тогда в соответствии с формулой (3.3) под собственным рассеянным полем E rr ,
H rr любого тела следует понимать поле, возникающее вокруг рассеивающего тела
дополнительно к теневому полю E rt , H rt вокруг соответствующего (с аналогичной
рассматриваемому телу геометрией) абсолютно черного тела.
Следует отметить, что в соответствии с теоремой о теневом контуре [36], если
рассеивающее тело велико по сравнению с длиной волны, то поле, рассеянное черным
телом, в приближении физической оптики не зависит от формы поверхности тела и
полностью определяется его теневым контуром, т. е. границей освещенной части
поверхности. Таким образом, например, черный шар, черный диск при нормальном
падении волны и черный конус при падении волны вдоль его оси при одинаковых
радиусах создают одинаковое теневое поле. Более того, все непрозрачные тела независимо
от формы и граничных условий на их поверхности (при любом коэффициенте отражения
волны от освещенной части поверхности) при одинаковом теневом контуре имеют
одинаковое теневое поле рассеяния.
3.2.4. Эффективная площадь рассеяния
Для оценки радиолокационной заметности объектов вводят понятие эффективной
площади рассеяния, называемой также эффективной поверхностью рассеяния (ЭПР),
эффективным поперечником или поперечным сечением рассеяния [31]. В зарубежной
литературе часто встречается аббревиатура ЭПО - эффективная поверхность отражения
[32]. Различают дифференциальную и интегральную ЭПР. На практике для оценки
характеристик радиолокационных отражателей используют дифференциальную ЭПР. ЭПР
характеризует способность рассеивающего тела преобразовывать падающую на него
электромагнитную волну в рассеянную волну, распространяющуюся в направлении на
приемник.
ЭПР определяют как площадь поперечного сечения σ изотропного
отражателя, мысленно установленного на месте реального объекта, и создающего в
точке приема такую же плотность потока мощности рассеянной
электромагнитной волны, что и реальная цель [16], [31].
255
Найдем ЭПР (σ) объекта при полном поляризационном приеме [31]. Рассмотрим
задачу в следующей постановке. Пусть А – произвольное рассеивающее тело расположено
на достаточно большом расстоянии R0 от передающей (С) и приемной (В) антенн
РЛС (см. рис. 3.1). Передатчик С у поверхности объекта А создает напряженность
падающего поля Ei и соответствующую ей плотность потока падающей мощности Пi.
С
Ei
Eq
Еr
А
В
Еs
R0
Рис. 3.1. К определению ЭПР
Приемник В и передатчик С в общем случае разнесены на угол . В близости от
приемника В объект А создает напряженность рассеянного поля Er (Пr, –соответствующая
ей плотность потока рассеянной мощности). Интенсивность рассеянного объектом поля
(Er и Пr) зависит от формы тела А и его ориентации по отношению к В и С, а также от
угла .
Мысленно заменим объект А идеальным изотропным отражателем, рассеивающим
энергию ЭМП во все стороны равномерно. Поскольку расстояние R0 достаточно большое,
то рассеянную волну можно было считать сферической. Мощность рассеяния такого
изотропного тела в этом случае (по определению ЭПР изотропный отражатель и реальный
объект создают в точке приема одинаковый вектор Пойнтинга - Пr) будет иметь вид
Pr =4π R02Пr.
(3.5)
В то же время изотропный отражатель имеет площадь поперечного сечения σ,
перпендикулярную направлению падения волны, следовательно,
перехваченное
изотропным телом из падающего поля мощность равна
Pr =σ Пi.
Таким образом, величина σ, называемая эффективной поверхностью рассеяния тела
А, будет определяться следующим выражением:
= lim 4R02 П r / Пi .
(3.6)
R0
Учитывая соотношения П r = 0.5W E r
σ можно записать в виде
2
= lim 4R02 Er / Ei
R0
2
и Пi = 0.5W E i , формулу для расчета
2
.
(3.7)
ЭПР при разнесении передатчика и приемника в пространстве на угол (см. рис.
3.1) называют двухпозиционной или бистатической при полном поляризационном приеме,
а угол - двухпозиционным или бистатическим углом (смысл термина «полный
поляризационный прием» означает совпадение поляризаций падающей, отраженной и
принятой волн, то есть предполагается, что Ei и Er поляризованы одинаково и приемник
регистрирует полное поле Er). При = 0 ЭПР называют ЭПР обратного рассеяния,
однопозиционной, моностатической или, иногда, радиолокационной ЭПР. Под термином
ЭПР чаще всего понимают моностатическую ЭПР.
256
Строго говоря, на практике полного поляризационного приема не бывает. Вопервых, поляризация рассеянного поля (на рис. 3.1 поляризация r), как правило,
отличается от поляризации падающего поля (поляризация i) вследствие деполяризации
при рассеянии [31]. Во-вторых, поляризация приемной волны обычно не совпадает с
поляризацией рассеянного поля, и, следовательно, в приемник попадает лишь на часть
рассеянного поля, поляризованного в соответствии с поляризацией приемной антенны.
Таким образом, приемник выделяет из рассеянного поля некоторую составляющую Es с
поляризацией s; другая составляющая Eq с поляризацией q, ортогональной s, не попадает в
приемник. Если поляризации излучаемого поля i и принимаемого поля s совпадают, то
говорят о согласованном приеме или приеме на параллельной поляризации. Это наиболее
часто встречающийся случай РЛС с простейшим одноканальным антенно-волноводным
трактом. Если же поляризации i и s ортогональны (i s), то говорят об ортогональном
приеме, перекрестном приеме или приеме на ортогональной поляризации
(кроссполяризации) [31].
В соответствии с рис. 3.1 выражение ЭПР объекта А при излучении поля с
поляризацией i и приеме поля с поляризацией s запишется в виде
is = lim 4R02 Es / Ei
2
.
R0
(3.8)
Для вычисления ЭПР по этой формуле необходимо уточнить понятия параллельной
и ортогональной поляризаций i и s [31].
Аналогичным образом вводятся понятия теневой или эффективной поверхностью
затенения и ЭПР при полном поляризационном приеме. Для этого пользуются понятием
черного тела.
Так как теневое поле концентрируется вблизи направления ≈π, а собственное
рассеянное - во всех остальных направлениях, то вблизи так называемого направления
рассеяния вперед (≈π) ЭПР можно назвать эффективной поверхностью затенения и
определить как:
t = lim 4R 2 Ert / Ei
R0
2
,
(3.9)
где E rt – теневое рассеянное поле позади абсолютно черного тела, обладающего таким же
теневым контуром, как и заданное рассеивающее тело. Это площадь поверхности
идеального «изотропного» абсолютно черного тела, создающего во всех направлениях
одинаковое теневое поле, равное теневому полю реального тела в рассматриваемом
направлении. Особенность теневого рассеянного поля Ert в том, что в приближении
физической оптики его поляризация всегда совпадает с поляризацией падающего поля Ei.
Поэтому эффективная поверхность затенения, в отличие от ЭПР, не зависит от
поляризации. Большое по сравнению с длиной волны тело в некотором телесном угле
вблизи в окрестности направления =π затеняет поток падающей энергии. Эффективная
поверхность затенения является мерой этого явления. Затенение отсутствует, когда σt=0, и
оно максимально, когда σt∞.
Поскольку в соотношении (3.3) теневое поле не зависит от поляризации падающей
волны, то на основании этого можно записать выражение, определяющее понятие ЭПР
при полном поляризационном приеме:
r = lim 4R 2 Err / Ei
R0
2
.
Таким образом, величина σr представляет собой ЭПР без учета теневого
рассеянного поля.
3.2.5. Интегральный поперечник рассеяния
257
(3.10)
3.2.6. Интегральный поперечник поглощения
3.3. ЭПР тел простой формы
3.3.1. ЭПР металлической сферы (шара)
3.3.2. ЭПР плоских тел
3.3.3. ЭПР металлического диска
3.3.4. ЭПР прямоугольной пластины
3.3.6. ЭПР цилиндра
3.4. Искусственные радиолокационные отражатели
3.4.1. Общие понятия
Искусственные радиолокационные отражатели – это устройства направленного
отражения (как правило, большого уровня) радиоволн. Приведенные выше отражатели
простой формы имеют высокий уровень ЭПР в очень узком секторе углов (плоские
отражатели см. 3.3.2-3.3.4) или ненаправленное рассеяние (цилиндры) только в одной
плоскости [4], [19], [20], [31]. Для расширения углового сектора с высокой ЭПР
проектируют специальные устройства - пассивные направленные переизлучатели
электромагнитной энергии и активные усилители-ретрансляторы, радиолокационные
отражатели. Они используются для увеличения эффективной площади рассеяния ложных
радиолокационных целей и ловушек [31].
К пассивным переизлучателям относятся уголковые отражатели, линзы Люнеберга
и антенные решетки Ван-Атта. Радиолокационные отражатели широко применяются в
качестве навигационных знаков, маркеров и буев при управлении движением воздушного
и морского транспорта, служат эталонами при градуировке и калибровке различных
радиолокационных устройств, являются средством увеличения радиолокационной
контрастности малых морских судов, метеорологических зондов и космических
аппаратов, используются в качестве мишеней, радиолокационных ловушек и ложных
целей.
3.4.2. Двугранный уголковый отражатель
Уголковые отражатели [31] представляют собой жесткую конструкцию из двух или
трех
взаимно-перпендикулярных
металлических
граней (различной
формы).
Металлические двугранные уголковые отражатели представляют собой простейший тип
радиолокационных отражателей. На практике они используются относительно редко, так
как они являются широкоугольными отражателями только в одной плоскости. Тем не
менее двугранные отражатели часто входят как составные элементы в различные
конструкции, для которых рассчитываются рассеянные поля, поэтому они представляют
особый интерес.
Двугранный уголковый отражатель состоит из двух плоских металлических граней
(рис. 3.13), развернутых под определенным углом 0<<π (чаще всего 900). В результате
при падении плоской волны между его гранями возникают двукратные или многократные
переотражения. Внутренние поверхности граней, если они достаточно велики по
сравнению с длиной волны, образуют систему из двух плоских зеркал. Угол
определяет кратность переотражения волн между гранями. При <π/2 отражения
оказываются многократными.
Для расчета характеристик рассеяния двугранных уголковых отражателей больших
по сравнению с длиной волны размеров можно использовать метод последовательных
258
приближений Вестпфаля (многократных переотражений от граней на основе метода
физической оптики), но чаще всего используют апертурный метод [31], который основан
на представлении геометрической оптики. Согласно этому методу строятся
эквивалентные синфазные апертуры, которые затем, на основе представлений физической
оптики, рассматриваются как источники рассеянного поля в виде плоских пластин
соответствующего размера и формы.
А
А
b
b
А
А
a
a
r
r
z
z
а
б
Рис. 3.13. Двугранные уголковые отражатели:
а – двукратное отражение при >π/2; б – трехкратное отражение при <π/2
Такие представления для двухгранного уголка с прямоугольными гранями дают
следующее выражение для моностатической диаграммы ЭПР
σ() 2σ m
sin ka sin
4
cos( ) cos2 ( )
4
4
ka sin
4
где
m
8a 2b 2
2
4
4
2
i ka cos( )
e 2
4
;
(3.40)
,
.
Основным недостатком двухгранных отражателей является тот факт, что они
обладают широкой моностатической диаграммой ЭПР только в плоскости,
перпендикулярной ребру уголка. В ортогональной плоскости, которой принадлежит грань
А-А (см.рис. 3.13), ЭПР принимает максимальное значение на биссектрисе угла и
определяется таким же выражением, как и у прямоугольной пластины, совпадающей с
раскрывом уголкового отражателя,
3.4.3. Трехгранный уголковый отражатель
В зависимости от формы они могут быть треугольными, прямоугольными и
секторными (рис. 3.15) [4, 19, 20, 31]. Уголковые радиоотражатели даже небольших
размеров обладают значительными ЭПР. ЭПР, однако, очень сильно зависит от точности
выдержки прямых углов между гранями. Например, уголковый отражатель с
259
треугольными гранями при а =125 см и λ = 3,2 см имеет максимальную ЭПР, равную 1·104
м2. При отклонении углов между гранями от прямых всего на 1° ЭПР снижается в 30 раз и
равна примерно 300 м2. Для треугольных, прямоугольных и секторных уголковых
отражателей максимальные ЭПР соответственно будут:
4 a4
a4
a4
тр 2 , пр 12 2 , кр 2 2 ,
3
(3.42)
где а – длина ребра отражателя.
а
б
в
Рис. 3.15. Уголковые отражатели с гранями:
а – треугольный; б – прямоугольный; в – круглый
По сравнению с изотропными телами уголковые отражатели обладают
направленной диаграммой рассеяния.
Максимальная ЭПР уголка возрастает при увеличении размера его граней и
уменьшении длины падающей волны.
Менее чувствительны к погрешностям изготовления уголки с треугольными
гранями, имеющие более широкую и равномерную диаграмму направленности [4], а также
обладающие большей жесткостью граней. Поэтому их применяют гораздо чаще, несмотря
на то, что для получения той же ЭПР требуется несколько больше материала, чем на
отражатели с квадратными гранями.
3.4.4. Линзовые отражатели
Все линзовые отражатели, как следует из самого их названия, содержат в качестве
основных элементов диэлектрические линзы различных типов. Чаще всего используются
те или иные модификации диэлектрической линзы Люнеберга, которая может быть
цилиндрической или сферической.
Линза Люнеберга (рис. 3.24,а) – диэлектрический цилиндр без потерь [31],
диэлектрическая проницаемость которого меняется вдоль радиуса (который >> λ) от ε=1
на поверхности цилиндра до ε=2 на оси (рис. 3.24,б).
260
dl
а
F
а
а
б
Рис. 3.24. Линза Люнеберга
Благодаря этому падающая волна беспрепятственно проникает внутрь линзы. Все лучи,
независимо от угла падения на поверхность линзы, имеют одинаковые фазовые длины и
сходятся в одной точке F , лежащей на поверхности линзы с противоположной стороны.
Чтобы превратить линзу Люнеберга в отражатель, достаточно поместить в ее фокусе
металлическую пластину. Лучи, падающие на пластину, и лучи, отраженные от нее, в силу
симметрии имеют одинаковые траектории, и после выхода из линзы распространяются в
обратном направлении, образуя плоский фронт.
Отражатели на основе цилиндрических линз по своим рассеивающим свойствам
подобны либо плоской пластине, либо двугранному уголковому отражателю.
Для расширения рассеивающих свойств в телесном угле используют сферические
линзы (рис. 3.25,а).
Ширина диаграммы рассеяния линзы зависит от размеров металлизированной
поверхности (рефлектора). Например, если рефлектор равен половине поверхности шара,
ширина диаграммы рассеяния составляет 140° (рис. 3.25,б) [4, 20]. Максимальная ЭПР
такой линзы вычисляется по формуле
= 4a 4 /2
(3.43)
Епад
дБ
30
Еотр
20
10
-90
-45
0
45
90 ,град
Рефлектор
а
б
Рис. 3.25. Отражение электромагнитной волны линзой Люнеберга (а) и ее примерная
диаграмма рассеяния (б)
Всенаправленный по азимуту отражатель можно получить, окружив часть шара
металлическим кольцом (рис. 3.26,а) [4, 20, 31]. Максимальное значение ЭПР данного
отражателя определяется шириной металлизированного кольца l – из выражения
=
261
4
2
(R 2 2Rl ) 2 .
(3.43)
R
Металлическое
кольцо
l
а
б
Рис. 3.26. Линза Люнеберга с металлическим кольцом (а) и ее диаграмма рассеяния
в азимутальной плоскости (б)
Рис. 3.27. Некоторые типы линз Люнеберга
На базе линзы Люнеберга разработано несколько конструкций линзовых
отражателей (рис. 3.27) [4, 20, 31], позволяющих сформировать те или иные диаграммы
рассеяния.
3.4.5. Отражатели-антенны
Отражатели-антенны представляют собой обычные антенны, используемые в
режиме рассеяния принимаемых сигналов. Наибольший уровень отраженного сигнала
достигается при коротком замыкании антенны в точке подключения волноводного тракта
или фидера. В такой антенне, если она изготовлена из идеального проводника или из
диэлектрика без потерь, принимаемая энергия переизлучается и создает рассеянное поле.
Одними из наиболее широкоизвестных и эффективных отражателей - антенн
являются антенные решетки Ван-Атта [4, 20, 31].
Конструктивно антенная решетка Ван-Атта в одном из вариантов представляет
собой металлическую пластину с размещенными на ней дипольными вибраторами. Они
размещаются рядами на расстоянии /4 от металлической пластины, параллельно ей.
Пары диполей располагаются симметрично относительно центра пластины.
Электрические длины кабелей, соединяющих симметричные диполи, одинаковы.
Благодаря этому обеспечивается отражение электромагнитных волн в обратном
направлении (рис. 3.28) [4, 20, 31]. Для того чтобы такая решетка могла отражать волны с
любой поляризацией, каждая пара диполей располагается под углом 90° к соседней. Если,
например, решетка образована из N полуволновых диполей, расположенных на λ /2 друг
от друга и на λ/4 от металлической пластины, то ее ЭПР может быть определена по
формуле [4, 20]
4S 2
= 2 (sin( cos)) 4 ,
2
где θ – угол падения; S = Nλ2/4 - площадь раскрыва решетки.
262
(3.44)
При θ = 0 ЭПР решетки максимальна и равна = 2 N 2 /4 .
Металлическая
пластина
Соединительные
коаксиальные кабели
Рис.3.28. Ответчик Ван-Атта
Решетка (ответчик) Ван-Атта обладает следующими преимуществами перед
уголковыми и линзовыми отражателями [4]:
1. Диаграмма рассеяния шире, чем у уголкового отражателя.
2. Отраженный сигнал может быть промодулирован.
3. В решетке имеется возможность изменять направление рассеяния.
4. Значительное увеличение ЭПР может быть обеспечено за счет использования
встроенных в соединительные линии усилителей.
5. Можно изменять поляризацию переизлученного сигнала.
6. Может быть обеспечено угловое сканирование диаграммы рассеяния.
Очень часто вместо диполей применяют печатные плоские спирали. В этом случае
за счет диапазонных свойств спиралей расширяется и рабочий диапазон частот решетки.
Расчет решеток Ван-Атта ведется с помощью приближенных методов [31]. В
работах [41] - [44] впервые получено строгое решение задачи рассеяния плоской волны на
двумерной модели решетки Ван-Атта, образованной плоскопараллельными волноводами.
Решение получено методом интегральных уравнений [37].
y
V
L1 A
A
A
i
A
L2
d
b
V2
V
Рис.3.29. Решетка Ван-Атта из плоскопараллельных волноводов
263
x
Распределение электрического (кривые 1 и 2 ) и магнитного (кривые 3 и 4) полей на
эдементах решетки Ван-Атта - второй вариант
Кривые 1 и 3 - строгое (полномодовый расчет соединяющих трактов) решение
Кривые 2 и 4 - NV-модовый расчет соединяющих трактов
Проведенные численные исследования [41] - [44] показали, что при создании
решеток Ван-Атта следует добиваться участия в формировании диаграммы рассеяния как
можно большего
числа распространяющихся волн, то есть увеличением размера d
4
Ex (x)излучателей.
,
trace 1
раскрыва
При этом на практике можно ограничиться
размером раскрыва
trace
2
излучателя d 1,54 , что обеспечивает существование в волноводах четырёх
H z (x)
распространяющихся
типов волн E , n 0, 1,2,4 , которые волны должны складываться
n
2
в раскрывах A n синфазно [41] - [44] (то есть иметь одинаковые фазовые скорости в
трактах l ),
0
kx(i )
5
0
5
В качестве иллюстрации к сказанному на рис.3.30 приведена
решетки с
пятью парами излучателей при d 1,54 ; b 0,4 и длине волноводов l 37,5 ,
обеспечивающей практически одинаковый набег фаз всех четырех распространяющихся
рассеяния
решетки Ван-Атта
второй
вариантзадачи, кривая 2 — строгому
типовДиаграммы
волн. Кривая
1 соответствует
строгому
решению
Кривая 1 - строгая теория.
решению, но с учетом в трактах Vn только основного типа волны E0 и кривая 3 —
Кривая 2 - строгая теория при одномодовых соединяющих трактах
приближенным
расчетам [31]. расчет
Кривая 3 - приближенный
Такая решетка (см.рис.3.29) обеспечивает максимально возможный рабочий сектор
d
b
b0
0
углов 451.540000
(см.рис.3.30) относительно
нормали
к решетке. l Основная
0.400000
0.400000
1.200003 сложность
реализации предложенной в работах [41] - [44] решетки является обеспечение
h
2
l
A
синфазности
сложения распространяющихся
в трактах волн в раскрывах излучателей
1.940000
0.020000 NV 0.000000 N 5.000000
37.500100 n
в широкой
полосе частот.
(i ) 40
,
дБ
trace 1
trace 2
trace 3
30
20
10
0
0
30
60
90
120
150
180
i0
Рис. 3.30. Моностатические диаграммы ЭПР
Анализ решеток Ван-Атта на основе многомодовых линий передачи [41] - [44]
показал, что они обладают в 5 6 раз более широкими моностатическими диаграммами
рассеяния, чем широко используемые в настоящее время – одномодовые [31].
3.4.6. Усилители - ретрансляторы
Усилители - ретрансляторы [4] могут быть выполнены в соответствии со
структурной схемой, представленной на рис. 3.31. Принятые антенной А1 сигналы
264
усиливаются в ЛБВ и модулируются по амплитуде шумовым напряжением, поступающим
от генератора шума (ГШ). Далее сформированный помеховый сигнал излучается
антенной А2, обеспечивая имитацию флюктуации ЭПР реальной цели.
А1
А2
ЛБВ
ГШ
Рис. 3.31. Структурная схема усилителя-ретранслятора
Необходимое значение коэффициента усиления ретранслятора можно определить
из уравнения РЭП. В частном случае, если расстояние между ловушкой и прикрываемым
самолетом является малым по сравнению с дальностью «ракета – самолет», коэффициент
усиления определяется
kp
где kП – коэффициент подавления РЛС;
4 k П ц
,
2 GП
(3.45)
ц – ЭПР реальной цели; GП –коэффициент
усиления приемной антенны ретранслятора.
3.5. Особенности радиоэлектронного подавления некогерентных импульсных
РЛС обнаружения целей пассивными помехами
3.5.1. Общие положения
Для создания искусственных пассивных маскирующих помех широко используют
дипольные отражатели, которые исторически являются родоначальниками таких помех
[14]. Поскольку отражение от диполей является некогерентным [4], то они особенно
эффективны для противодействия некогерентных импульсных РЛС, которые при
обработке сигналов не учитывают доплеровский сдвиг частоты отраженных ЭМВ от цели
и от облака дипольных отражателей. В результате на выходе амплитудного детектора
спектры полезного сигнала и сигнала помехи перекрываются, затрудняя обнаружение и
селекцию цели.
Цель не обнаруживается в облаке дипольных помех, если мощность помеховых
сигналов (отраженных от диполей, распределенных в импульсном объеме) превышает в
определенное число раз мощность полезного сигнала (отраженного от цели). Отношение
мощности помехового сигнала к полезному на входе приемника равно [4]
k (
PП
)вх ио ,
PС
ц
(3.46)
где ц – ЭПР цели.
Задача выделения полезного сигнала на фоне пассивных помех имеет много
общего с проблемой обнаружения сигнала в гауссовом шуме. Сигналы, отраженные от
облака диполей при достаточно большой его плотности, в силу центральной предельной
теоремы могут рассматриваться как гауссов шум, однако в отличие от белого шума
автокорреляционная функция этого шума не будет совпадать с δ-функцией [4].
Вследствие коррелированности шума, порождаемого облаком диполей,
коэффициент подавления пассивными помехами будет зависеть от параметров
265
спектральной плотности сигналов, отраженных от облака диполей. Это особенно важно
учитывать при определении коэффициента подавления РЛС, имеющих приставки для
компенсации сигналов, от пассивных помех.
Минимально необходимое отношение
(
PП
) min
PС
, при котором вероятность
обнаружения цели на фоне дипольных отражателей, для заданной вероятности ложной
тревоги, меньше некоторого значения [4] (0,1—0,5), называется коэффициентом
подавления импульсной РЛС пассивными помехами.
3.5.2. Дипольные отражатели
3.6 Особенности радиоэлектронного подавления когерентных
импульсных РЛС обнаружения целей пассивными радиопомехами
3.6.1. Изменение пространственного положения облака ПРЛО в целом приводит к
доплеровскому смещению частоты помехового сигнала, а случайные блуждания
дипольных отражателей в облаке вызывают амплитудные и фазовые флюктуации,
расширение спектра сигнала, отраженного от облака.
В когерентной импульсной РЛС [4] с большой скважностью для защиты от
пассивных помех принимают специальные меры. Например, доплеровское смещение
частоты, обусловленное движением облака, учитывается регулировкой частоты
когерентного генератора с помощью устройства компенсации ветра, исходный сигнал в
которое поступает со специального датчика. Амплитудные и фазовые колебания
помехового сигнала ослабляются использованием в РЛС схемы череспериодной
компенсации (СЧК). Подавление когерентных импульсных РЛС с СЧК пассивными
радиопомехами вызывает определенные трудности [4].
3.7. Особенности радиоэлектронного подавления РЛС автоматического
сопровождения целей пассивными радиопомехами
3.7.1. Проблема защиты РЛС от пассивных помех является весьма актуальной [4],
поскольку ДО в настоящее время нашли широкое применение в авиации как для
групповой, так и для индивидуальной маскировки самолетов.
Пассивные радиопомехи могут [4] успешно применяться для подавления
некогерентных импульсных РЛС обнаружения. Применение когерентных импульсных
РЛС ОНЦ с СЧК позволяет существенно ослабить их действие. Однако увеличение
мощности помехового сигнала может обеспечить условия, при которых РЛС с СЧК будет
подавлена пассивными радиопомехами.
Применение в РЛС систем управления оружием непрерывных и квазинепрерывных
зондирующих сигналов позволяет осуществить непосредственную селекцию движущихся
целей за счет отличия доплеровских скоростей реальных целей и облака ДО. Такие РЛС
хорошо защищены от воздействия пассивных помех.
В настоящее время успешно ведутся работы по дальнейшему повышению
эффективности подавления пассивными помехами РЛС с непрерывными и
квазинепрерывными сигналами.
3.8. Маскировка объектов с помощью ложных целей и ловушек
3.8.1. Ложные цели
Одним из способов радиопротиводействия является создание ложной информации
в контурах целераспределения, наведения и самонаведения [4, 20]. Наиболее просто эта
266
задача может быть решена применением радиолокационных ловушек или ложных целей,
запускаемых при преодолении ПВО противника с летательных аппаратов или с земли.
Основными задачами применения ложных целей [20] в контурах целераспределения
являются:
дезориентация операторов РЛС и перегрузка вычислительных устройств контура
(системы обработки информации);
увеличение времени на опознавание образа цели (определение истинных целей);
отвлечение ударных средств ПВО (истребителей, ракет) на поражение ложных
целей.
В качестве ложных целей применяются ракеты, оснащенные стартовыми или
маршевыми двигателями, наличие которых позволяет осуществлять автономный
управляемый или неуправляемый полет в течение длительного времени (до нескольких
десятков минут). Чтобы ракета-ложная цель создавала такой же по интенсивности и
спектру сигнал, как и защищаемый летательный аппарат, она оборудуется
соответствующими средствами – активными и пассивными ретрансляторами. Ложные
радиолокационные цели могут быть также созданы в результате ионизации локальных
областей сжиганием в атмосфере легких металлов (натрия, цезия).
Эффективность ложных целей может быть оценена снижением вероятности
поражения прикрываемых самолетов.
В случае массового применения ложных целей вероятность поражения самолета,
прикрытого группой ложных целей, может быть вычислена по формуле [20]
Pm (n)
m
P,
n
где п – общее количество целей (ложных и реальных) в группе; т – число выпущенных
ракет; Р – вероятность поражения цели за один выстрел.
Вышеприведенная формула справедлива при следующих предположениях:
m ≤ n;
выбор целей (ложных или реальных) системой целераспределения для
обстрела равновероятен;
по каждой цели производится один пуск ракеты (одна атака истребителя)
независимо от того ложная эта цель или реальная.
Pm(n)
0.8
n=1
n=2
n=10
n=4
n=20
0.4
2
4
6
8
10
12
14
m
Рис.3.40. Зависимость вероятности поражения одной истинной цели Рт(п),прикрытой n – 1
ложными целями, после m выстрелов (пусков)
Зависимость вероятности поражения одной истинной цели Рт(п), прикрытой п-1
ложными целями, после т выстрелов, приведена на рис.3.40 [20]. Кривые построены для
вероятности поражения цели одной ракетой Р = 0,8.
Для указанных условий применение ложных целей существенно снижает
вероятность поражения самолетов. Так, в случае прикрытия самолета одной ложной
целью (n = 2) вероятность его поражения одной ракетой (т = 1) снижается в два раза
267
(Рт(п) = 0,4) по сравнению с вероятностью поражения неприкрытого самолета (n = 1).
Однако снижение эффективности действий ПВО практически до нуля (Рт(п) ≈ 0,05 ÷ 0,1)
обеспечивается применением относительно большого количества ложных целей (10 ÷ 20).
Это является одним из недостатков применения ложных целей в контурах
целераспределения.
Воспроизведение амплитудной компоненты вектора признаков ложной цели
обеспечивается либо с помощью усилителей-ретрансляторов, либо пассивными
рассеивателями электромагнитной энергии.
Активные усилители-ретрансляторы могут быть эффективны в метровом и
дециметровом диапазонах волн и на больших расстояниях до подавляемых РЛС в связи с
их ограниченными энергетическими возможностями. На малых расстояниях мощность
сигнала, создаваемого ретранслятором на входе подавляемого устройства, будет меньше
мощности полезного сигнала, отраженного от прикрываемого самолета, вследствие чего
оператор может опознать среди ложных целей реальную.
Пассивные рассеиватели (различного рода отражатели) обеспечивают получение
достаточно большой эффективной площади рассеяния ловушки, соизмеримой с ЭПР
прикрываемого самолета в сантиметровом диапазоне волн.
В отдельных случаях [20] на ракетах-ловушках могут быть установлены
передатчики активных помех и устройства сбрасывания дипольных отражателей.
Схема, поясняющая принцип действия генератора ложных целей, приведена на
рис.3.41 [29, 40].
Аf
fлц
0
fц
Елц
Ец
t
В
ЛЦ
С
D
Rлц/c Rц/c
ГЛЦ
б
f’лц
.Rлц
f'ц
Ц
.
Rц
Rлц
Rц
t
2Rлц/c
ПРД
1
2
ПРМ
2Rц/c
а
в
Рис. 3.41. К принципу действия генератора ложных целей
Передатчик РЛС обнаружения в точке 1 создает и излучает зондирующий сигнал
частоты f0 . Этот сигнал достигает цели (ЛА) и отражается от нее (импульс D на
рис.3.41,б). Амплитуда отраженного импульса
Eц ~ ц ,
задержка
частота отличается от номинальной на частоту доплеровского сдвига
268
f дц
ц Rц / c ,
Rц ' / .
а
Более слабый сигнал В попадает на ложную цель и отражается от нее с амплитудой
Eлц ~ лц .
Пришедшие на радиоприемник РЛС в точке 2 сигналы имеют удвоенные задержки
и доплеровские сдвиги частоты, а их амплитуды различны. Такое различие по параметрам
позволяет распознать ложную цель на фоне истинной. Чтобы избежать этого, на ЛЦ
ставят генератор ложных целей, излучающий ответный импульс помехи С с амплитудой,
примерно равной Eц .
В результате из точки 2 (рис.3.41,в) в радиоприемник поступают импульсы от
истинной и ложной цели, мало отличимые по амплитуде. Это создает эффект
размножения целей [29, 40]. При этом необходимо обеспечить подобие импульсов от
истинной и ложной целей по своим параметрам и по флуктуациям, обусловленным
отражением от протяженной цели.
Проще всего генератор ложных целей выполнить по схеме ретранслятора с
дополнительным усилением и модуляцией запросного сигнала РЛС.
3.8.2. Радиолокационные ловушки
Применение ловушек в контуре наведения или самонаведения должно [20]
приводить, как правило, к замыканию его на ложную цель. Время замыкания должно быть
соизмеримо со средним временем наведения (самонаведения) средств поражения ПВО.
Пуск (сброс) ловушки в этом случае целесообразно производить после замыкания контура
наведения (самонаведения) на реальную цель. Удачное применение ловушки приводит
[20] к срыву атаки зенитной управляемой ракеты (истребителя) или к получению промаха,
безопасного для прикрываемого самолета.
Вектор признаков ловушки должен [20] иметь компоненты, обеспечивающие
захват ее на сопровождение, с учетом амплитудных (энергетических) характеристик,
скорости и ускорения. Помеховый сигнал, порождаемый ловушкой на входе подавляемой
системы автоматического сопровождения, должен превышать полезный сигнал, чтобы
обеспечить возможность переключения простейших следящих систем на ловушку.
По способу применения радиолокационные ловушки подразделяются на
управляемые, буксируемые и сбрасываемые.
Управляемые радиолокационные ловушки подобны [20] управляемым ложным
радиолокационным целям и представляют собой ракеты, на которых устанавливаются
активные или пассивные рассеиватели электромагнитной энергии.
На ракетах-ловушках могут устанавливаться как стартовые, так и маршевые
двигатели, обеспечивающие управляемый полет («по радио» или по программе) в течение
времени от нескольких секунд до нескольких минут.
Ракеты-ловушки обеспечивают срыв наведения (самонаведения) за счет увода за
собой атакующей ракеты (или истребителя).
Направление пуска ракеты-ловушки определяется направлением атаки и
соотношением векторов скорости цели, ловушки и атакующего снаряда. Для успешного
применения ракеты-ловушки прикрываемый самолет должен одновременно с запуском
ловушки осуществлять маневр по скорости и направлению.
В качестве буксируемых радиолокационных ловушек могут [20] использоваться
металлические сети, пассивные или активные рассеиватели, буксируемые самолетами на
длинных тросах. Ловушка может исполнить свою роль, если она не выделяется на экране
РЛС по угловым координатам.
Будучи привязанной к носителю, ловушка будет иметь по существу ту же самую
скорость и доплеровскую частоту. Этого достаточно, чтобы создать желаемый
имитационный или шумовой сигнал с эффективной мощностью, достаточной чтобы быть
269
захваченным следящими стробами угрожаемого средства. Однако буксируемая ловушка
всегда сталкивается с проблемой перекрытия по углам.
Удаление буксируемой ловушки от самолета в основном [20] определяется
разрешающей способностью подавляемой системы по скорости и углу (рис.3.42).
vc
L
С
Л
vc
q
vc
Dр
vл
D
vр
P
Рис.3.42. Схема наведения ракеты на цель,
буксирующую ловушку
Условие неразрешения самолета и ловушки по углу:
L
где
D p D
sin q
,
D p - разрешающая способность подавляемой РЛС по углу, q – ракурс ловушки.
Буксируемая ловушка очень эффективна против полуактивных ракетных систем,
поскольку создаваемая ею эффективная мощность достаточна для обеспечения
соответствующей защиты против большинства используемых в настоящее время систем
Буксируемые ловушки вероятно менее эффективны против ракет с командным
наведением, так как оператор таких систем может легко отличить самолет от ловушек. В
общем случае трудно обеспечить буксируемую ловушку высокой эффективной
мощностью, достаточной для того, чтобы заставить РЛС командного управления ракетой
перейти в режим сопровождения по помехе. Другой проблемой буксируемой ловушки
является ее потенциальная неприемлемость для пилотов, которые вынуждены мириться с
ухудшением аэродинамики самолета и принимать это во внимание при совершении
маневрирования.
Сбрасываемые (расходуемые) ловушки не имеют двигателей и представляют собой
активные или пассивные рассеиватели электромагнитной энергии. В частном случае
ловушкой может быть пачка, ракета или снаряд, начиненные дипольными отражателями.
Эти системы РЭП базируются на выбросе малогабаритных объектов, полезная
нагрузка которых позволяет генерировать имитирующие сигналы с целью
перенацеливания следящих стробов угрожаемой системы.
Две проблемы, которые при этом должны быть решены, связаны с доплеровской
частотой и продолжительностью их эффективного действия.
Доплеровская проблема может быть решена путем излучения в направлении
ловушки соответствующим образом рассчитанной частоты, которая должна излучаться,
чтобы увести стробы скорости противосамолетной ракеты, или соответствующим образом
откорректированной непосредственно на борту ловушки.
270
Вторая проблема заключается в том, что после выброса расходуемой ловушки
очень трудно поддерживать долго ее эффективность, так как она будет тотчас же
отделяться от самолета. Поэтому перед ее пуском необходимо быть уверенным, что ракета
уже приближается и находится на правильной дальности. При отсутствии этой
информации необходимо запускать расходуемые ловушки через определенные интервалы,
начиная с момента обнаружения непрерывного излучения, по всей вероятности
являющемся облучением полуактивной ракеты. С этой целью самолет должен быть
оснащен большим количеством ловушек.
Для того, чтобы увеличить эффективность этих устройств, разработаны системы,
базирующиеся на выбросе активных ловушек в направлении приближающейся ракеты,
что увеличивает продолжительность их эффективного действия.
В любом случае должны быть решены проблемы по развязке принимаемых и
излучаемых сигналов на столь малом объекте, каким является ловушка.
Защита морских и воздушных носителей должна быть различной вследствие ряда
принципиальных особенностей:
при защите воздушных носителей с помощью внебортовых систем РЭП
необходимо, прежде всего, преодолеть проблему имитации доплеровской частоты
отраженного сигнала от самолета. Поскольку почти все противосамолетные
системы используют мощные доплеровские фильтры, система РЭП, не способная
обеспечить вхождение сигнала помехи в доплеровский фильтр, является
неэффективной.
в случае защиты морских объектов основной проблемой, требующей разрешения,
является создание сигнала с соответствующей эффективной мощностью,
способной замаскировать высокую ЭПР корабля. Требуемая эффективная
мощность может быть получена либо с помощью усиления антенны, либо с
помощью высокочастотной мощности, генерируемой ЛБВ. Однако в первом случае
весьма сомнительно, что ложная цель ограниченного размера сможет нести очень
направленную антенну и бортовую систему ее наведения. В последнем случае, с
другой стороны, ложная цель должна нести довольно тяжелую нагрузку,
состоящую из электронных схем, мощного источника питания и ЛБВ с
соответствующей системой охлаждения.
Если ложная цель представляет собой буксируемый бакен, весовых проблем не
возникает, но остается проблема с ее правдоподобием, поскольку противокорабельные
ракеты обладают высоким разрешением по дальности.
Если угроза состоит из двух ракет, то можно предположить, что ловушка может
быть разрушена первой ракетой; в этом случае наличие второй буксируемой ловушки в
соответствующем месте будет решающим.
Применительно к выбрасываемой морской ловушке, кроме проблемы, связанной с
ограниченностью объема и веса для размещения полезной нагрузки, должны быть
разрешены проблемы, связанные с кинематикой ракетной ловушки и ее правдоподобием.
Ловушка должна выбрасываться в соответствующий момент времени, чтобы привлечь
внимание противокорабельной ракеты и отклонить ее на курс, не представляющий угрозы
для корабля.
В этом случае также должна быть рассмотрена дополнительная проблема,
создаваемая скоординированным пуском двух противокорабельных ракет.
По принципу действия радиолокационные ловушки подразделяются на пассивные
ловушки, осветительные ракеты, активные системы.
Пассивные ловушки [10]. Основная идея, подчеркивающая целесообразность
использования пассивных ловушек, заключается в простоте выбрасываемого устройства,
способного создавать радиолокационный образ (сигнатуру), для военных систем
противника, аналогичный сигнатуре носителя, подлежащего защите.
271
Применительно к морской ситуации следует упомянуть уголковые отражатели,
которые могут быть надувными, располагаться подобно бакенам, быть буксируемыми или
в свободном движении.
Одним из первых методов радиопротиводействия РЛС являлось рассеивание
дипольных отражателей. Диполи могут использоваться как для создания коридоров
скрытного проникновения объектов, так и для самозащиты носителей, выбрасывающих
их. При использовании диполей для самозащиты наиболее широко используемыми
методами являются методы перенацеливания и маскировки.
При перенацеливании стараются создать ложные цели с расположением,
отличающимся от положения защищаемого носителя (рис.3.43). Основная цель при этом ввести в заблуждение систему захвата цели РЛС сопровождения. В основном диполи
выбрасываются согласованно после того, как с помощью передатчика помех достигнут
срыв режима сопровождения или перед захватом цели ракеты.
Маскировка включает в себя распределение диполей в элементе разрешения РЛС,
где находится цель. Это может использоваться, когда ЭПР, создаваемая диполями, много
больше, чем ЭПР носителя.
Положительной стороной дипольных помех [10] является простота и легкость их
создания. Отрицательной стороной такой защиты самолета является то, что при выбросе
дипольные отражатели почти мгновенно замедляют скорость перемещения. Этот
недостаток может быть частично устранен, если перед выбросом дипольных отражателей
пилот сманеврирует таким образом, что создастся очень низкий доплеровский сдвиг
частоты отраженного от самолета сигнала относительно РЛС.
Применительно к морской ситуации отрицательной стороной является требование
создания более высокой ЭПР ложной цели с помощью диполей, чтобы защитить большие
объекты (корабли).
Рис.3.43. Перенацеливающие (отвлекающие) диполи
Для РЭП оптикоэлектронных средств применяются тепловые (пиропатроны,
противоинфракрасные снаряды и др.) и оптические ловушки (макеты объектов),
предназначенные для отвлечения на себя ракет, авиационных бомб с системами
самонаведения.
Очень хорошим средством радиопротиводействия средствам вооружения с ИК
наведением являются [10] пуски осветительных ракет (рис. 3.44).
272
Рис.3.44. Пуски осветительных ракет
Осветительные ракеты содержатся в специальных патронах, обычно складируемые
в тех же самых пусковых устройствах, которые используют для выброса дипольных
отражателей. После выброса они могут в течение нескольких секунд генерировать
излучение с интенсивностью более высокой, чем защищаемый объект. Ракета увлекается
светящейся ракетой и наводится на нее, забывая об истинной цели.
Проблемой противодействия данного типа является то, что защищаемый объект не
может нести неограниченное количество патронов, поскольку неизвестно, приближается
ракета или нет и неизвестно, когда следует пускать осветительные ракеты.
Для разрешения отмеченной проблемы можно использовать систему
предупреждения о пуске ракеты или систему предупреждения о приближении ракеты.
Активные системы. Основной целью таких систем является перенацеливание
угрожаемого средства на ложную цель, выбрасываемую с защищаемого носителя, путем
рассеяния сигнала, подобного отраженному, но более притягательного, чем отраженный
сигнал от истинной цели, или путем создания столь сильной шумовой помехи, что
приводится в действие помехозащита и РЛС переходит в режим сопровождения помех. К
активным системам помимо прочих относят наземные ложные цели-ловушки,
представляющие собой мощные источники рассеяния энергии радиоволн. Установленные
на некотором удалении от защищаемых объектов, они могут отвлекать на себя
управляемые ракеты с радиолокационными ГСН.
3.9. Противорадиолокационная маскировка
3.9.1. Методы противорадиолокационной маскировки объектов
Следуя хорошо известному принципу, что наилучшей защитой [10] является
устранение обнаружения, защищаемый воздушный или морской объект должен в первую
очереди минимизировать свою заметность (видимость) по отношению к поисковым
системам противника, которые могут быть радиочастотного (РЧ), инфракрасного (ИК) и
оптического типа.
Для снижения радиолокационной заметности могут [10] использоваться
следующие методы:
использование поглощающих материалов;
использование композитных материалов;
уменьшение острых кромок, неровностей поверхности и уголковых отражателей;
отклонение отраженных сигналов в сторону от направления на РЛС;
отклонения отражений в соответствующие направления;
273
устранение уголковых переходов;
снижение ЭПР антенны;
радиопоглощающие композитные материалы.
Эти методы направлены на снижение ЭПР защищаемого объекта.
3.9.2. Снижение ЭПР путем выбора формы отражающего объекта [4]
Значение ЭПР во многом определяется формой объекта, а также соотношением его
геометрических размеров и длины волны [45]. Так, установлено, что наименьшую ЭПР
имеет конус при его облучении со стороны вершины.
По соотношению геометрических размеров объекта и длины падающей волны цели
разделяются на 3 группы:
1)
цели с размерами много меньше длины волны (l<<λ),
2)
цели с размерами одного порядка с длиной волны (l≈λ),
3)
цели с размерами много больше длины волны (l>>λ).
При l<<λ ток, наводимый падающим полем на поверхности тела, имеет
одинаковую фазу по всей поверхности. В этом случае форма объекта и наличие малых по
сравнению с максимальным размером цели lmax частей не влияет на значение ЭПР. Таким
образом, мы можем заменить тело элементарным диполем размером lmax.
ЭПР такого диполя [4]
6
= 43lmax
/4 .
(3.57)
Такое же значение ЭПР имеет куб с размером ребер lmax. Если обозначить объем
куба V, то из выражения (3.57) получим
= 43V 2 /4
.
(3.58)
Формула (3.58) показывает, что для рассматриваемой группы целей ЭПР зависит
лишь от объема объекта.
Если l≈λ, то характерным является осциллирующая зависимость ЭПР от длины
волны. Цель имеет максимальную ЭПР при lmax= 0,5λ.
При l>>λ имеет место оптическое рассеяние. Оно порождается поверхностными
токами, наводимыми падающей волной на многочисленных элементах цели. Каждый
элемент вносит свой вклад в суммарную ЭПР цели, значение которой определяется по
формуле [4]
4 e
i
4
Dr
dS '
(3.59)
S
где S – часть освещенной поверхности тела; dS’ – проекция элемента поверхности dS на
плоскость, нормальную к направлению падения волны, ∆r–разность хода лучей в точке
приема от двух элементов поверхности S.
ЭПР зависит от кривизны тела. Для плоских объектов характерно отсутствие
зависимости ЭПР от длины волны.
Плоская поверхность имеет ЭПР, обратно пропорциональную квадрату длины
волны:
где S – площадь поверхности.
= 4S 2 /2
274
,
(3.60)
В оптической области рассеяния (l>>λ) плоские поверхности, нормальные
направлению падения волны, имеют значительные ЭПР. Так, при λ = 10 см и S = l м2
получим σ = 1,25·103 м2.
Все реальные цели (самолеты, танки, корабли и др.) имеют сложную
геометрическую форму. Отраженный от таких объектов сигнал представляет собой
векторную сумму элементарных полей En (t ) , создаваемых отдельными характерными
частями цели
E (t )
N
2
i rn
En (t )e ,
(3.61)
n 1
где rn – расстояние от n-ro отражающего элемента, создающего в раскрыве приемной
антенны поле En (t ) .
Выражение (3.61) показывает, что суммарная ЭПР сложной цели зависит от длины
волны λ.
Основной вклад в суммарное поле EΣ вносят поля сигналов, отраженных от так
называемых блестящих точек цели.
Блестящими точками (областями) цели являются части выпуклых поверхностей,
различные стыки, сочленения и другие элементы, действующие как пассивные
рассеиватели. Положение блестящей точки на цели зависит от направления паления
волны к поверхности цели.
Из-за большого вклада в ЭПР объекта блестящих точек часто можно заменить цель
её эквивалентом, составленным только из блестящих точек. Очевидно, что для снижения
радиолокационной заметности объекта необходимо по возможности заменять участки
тела с резкими переходами на элементы с малыми радиусами кривизны (удалить кромки)
и с двойной кривизной, а плоские участки тела развернуть так относительно
предполагаемого направления падения волны на цель, чтобы зеркально-отраженные лучи
не возвращались обратно в антенну РЛС.
3.9.3. Противорадиолокационные покрытия
Противорадиолокационными покрытиями (ПРЛП) называются материалы (со
специальными химическими и физическими свойствами), предназначенные для нанесения
на маскируемые объекты в целях существенного снижения ЭПР или искажения
характеристик отраженного поля [4]. Принцип действия ПРЛП основан на явлениях
интерференции, дифракции и поглощения волн в материалах, имеющих сложную
физическую и химическую структуру. В настоящее время известны следующие виды
ПРЛП [4]:
1) интерференционные,
2) поглощающие,
3) неотражающие структуры,
4) комбинированные.
3.9.4. Интерференционные покрытия [4, 19, 20]
Действие интерференционных покрытий основано на эффекте снижения
интенсивности отражённой энергии ЭМВ за счёт интерференции нескольких когерентных
пучков волны, прошедших различные расстояния от облучателя к приёмнику. В
результате суммирования таких пучков получается интерференционная картина.
Расстояния между максимумами и минимумами интерференционной картины в дальней
зоне велико. Таким образом удаётся ослабить отражённый сигнал в направлении
минимумов интерференционной картины.
275
Различают два основных вида интерференционных покрытий: двухлучевые и
многолучевые.
В основе конструирования двухлучевых покрытий лежит явление двухлучевой
интерференции. Рассеяние от этих покрытий формируется за счет интерференции луча,
отраженного от внешней границы раздела, и луча, отраженного от границы раздела
«покрытие – объект» (рис.3.45,а). Антенная система Ан фокусирует луч в точке Р. За счет
интерференции двух монохроматических волн Е1 и Е2, отличающихся постоянной фазой
δ, интенсивность IР результирующего поля
I p Ep
где
I1, 2 E1, 2
2
2
E p E1 E2
зависит от разности фаз δ:
I1 I 2 2 I1I 2 cos ,
(3.62)
– интенсивности интерферирующих пучков (косые скобки означают
усреднение по времени);
4
n1h cos ' .
0
P
z
(3.63)
z
S1
n1
E1
Aн
E2
y
y
h
n0
а
б
Рис.3.45. К пояснению принципов действия интерференционных покрытий: а –
двухлучевого; б – многолучевого
В выражении (3.63) п1 – коэффициент преломления покрытия; λ0 – длина волны в
свободном пространстве; h – толщина покрытия; θ' – угол преломления.
При нормальном падении (θ'=0˚) минимум интенсивности переизлучаемой волны
имеет место при δ=(2m+1)π, т = 0, 1, 2, т. е. при толщине покрытия
h
2m 1 0
.
4 n1
(3.64)
Минимальная толщина эффективно действующего покрытия
hmin= λ/4n1.
Под многолучевым интерференционным покрытием понимается [4] однослойная
или многослойная структура одинаковой толщины, переотражающая поле, состоящее из
суммы пучков, испытавших многократное отражение (рис.3.45,б). Все отраженные лучи
С1,С2,..., Ср порождены падающим лучом S1 и после отражения взаимно параллельны.
276
На рис.3.46 штриховой линией показаны диаграмма рассеяния металлической
пластины, а сплошной линией – диаграмма рассеяния той же пластины, защищенной
интерференционным покрытием. Из рисунка видно, что в направлении падения волны
отражение отсутствует [4]. Однако в других направлениях интенсивность отраженных
сигналов может быть значительной. Это является недостатком, ограничивающим
применение интерференционных покрытий при решении задач ПРЛМ объектов,
обнаружение которых возможно многопозиционными радиолокационными системами.
Другим недостатком интерференционных покрытий является их малая диапазонность.
Рис.3.46. Диаграммы рассеяния металлической пластины (штриховая линия) и
металлической пластины с интерференционным покрытием (сплошная линия)
Хорошими диапазонными свойствами обладают многослойные покрытия типа
«слоеный пирог» [4]. В этих покрытиях удается достигнуть их полного согласования со
свободным пространством на нескольких частотах. Для двухслойного покрытия (два
диэлектрических слоя и две резистивные пленки) полное согласование достигается на
двух частотах. Толщина обоих слоев h1 и h2 и их диэлектрические проницаемости ε1 и ε2
выбираются из условия обеспечения заданной диапазонности.
В качестве интерференционных покрытий могут применяться металлические сети,
помещенные на расстоянии четверти длины волны от защищаемого объекта, или
диэлектрический материал толщиной λ/4, нанесенный на металлическую поверхность.
Подобные покрытия применяют для маскировки от радиолокационного обнаружения
устройств, обеспечивающих работу двигателей под водой, от перископов подводных
лодок и других объектов.
3.9.5. Поглощающие (градиентные) покрытия [4]
Принцип действия поглощающих покрытий основан на преобразовании в них
энергии падающей волны в тепловую или другие виды энергии.
Форма поверхности поглощающего покрытия также должна обеспечивать
плавность изменения его структуры от внешней границы к внутренней. Наиболее
распространенной является поверхность в виде пирамид и конусов (рис.3.47). Чем меньше
λ/L и Т/λ, тем лучше согласование. Коэффициент отражения экспоненциально
уменьшается с ростом λ. Однако за счет интерференции волн, отраженных от
неоднородностей, могут иметь место осцилляции этой зависимости.
Поглощающие покрытия имеют большую толщину, т.к. должны обеспечивать
изменение магнитной и диэлектрической проницаемости от значений ε r=μr=1 на внешней
границе покрытия до значений εn(z) и μn(z), обеспечивающие полное поглощение
падающих волн в толще покрытия, причём эти изменения должны происходить на
интервале, большем длины волны.
277
L
Т
S
Рис.3.47. Одна из форм поверхности поглощающего покрытия
Примером градиентного материала с пирамидальной формой поверхности может служить
поглотитель ECCOSORB VHP-NRL (рис.3.48) это прочный, пирамидальной формы,
углеродсодержащий уретановый пенообразный поглотитель. Применяется, в основном,
при строительстве безэховых камер, или для покрытия испытательного оборудования,
стоек и опор в безэховых камерах (БЭК). Он обеспечивает высокие показатели в широком
диапазоне частот при нормальном и широких углах облучения. Суффикс NRL означает
его соответствие требованиям пожарному сертификату военно-морской научноисследовательской лаборатории (NRL) США № 8093.
Рис.3.48. РПМ ECCOSORB VHP-NRL
Eccosorb VHP является предпочтительным решением для антенных измерений,
оборудования безэховых камер благодаря отличным характеристикам в СВЧ диапазоне. В
первую очередь предназначен для поглощения энергии фронтально, т.е. когда
направление излучения нормально к поглощающему элементу, но также показывает
хорошие характеристики при направлении излучения, отличном от нормального к
плоскости расположения поглощающих элементов. Именно поэтому ECCOSORB VHPNRL хорошо подходит для использования во всех областях безэховых камер. Имеются
поглощающие элементы различных геометрических размеров, что дает возможность
выбирать их в зависимости от конструкции камеры, частот и направления облучения.
Зависимость коэффициента отражения от частоты поглотителей ECCOSORB VHP18-NRL (кривая - 1), VHP-26- NRL (кривая - 2),VHP-36- NRL (кривая - 3), VHP-45NRL (кривая - 4) приведена на рис.3.49.
Частота в МГц
http://www.eccosorb.com/products/85/ECCOSORB%20VHP
278
2
1
4
3
Рис.3.49. Частотная зависимость коэффициента отражения от частоты
Примером использования материала ECCOSORB VHP-18-NRL может служить
БЭК ЦКП «Прикладная электродинамика и антенные измерения», созданного при
кафедре АиРПУ ТТИ ЮФУ (рис.3.50)
Рис.3.50 Безэховая камера ЦКП «Прикладная электродинамика и антенные измерения»
Фигурная поверхность покрытия позволяет увеличить площадь соприкосновения
покрытия со свободным пространством. Для увеличения количества отражений угол при
вершине пирамид должен быть 30…90° [19]. Хорошие поглощающие свойства покрытия
достигаются путем добавления в диэлектрические материалы угольной пыли (сажи).
Радиопоглощающие покрытия, состоящие из градиентных материалов [4, 19, 20],
представляют собой конструкцию, состоящею из основы и наполнителя. В качестве
основы используются неметаллические вещества, такие, как стеклотекстолит, пенопласт,
различные каучуки. Наполнителями служат магнитные (никель-цинковые ферриты,
http://airpu.tsure.ru/mac/index_mac.php
279
порошковое карбонильное железо и пр.) и немагнитные (порошок графита, угольная и
ацетиленовая сажа пр.) материалы.
Поглощение энергии повышайся, если концентрация наполнителя в поглощающем
материале увеличивается от внешней поверхности к основанию. Это достигается либо
специальной технологией пропитки основы поглотителем, либо изготовлением
многослойных материалов, где концентрация поглотителя постепенно возрастает. Чтобы
на границах слоев не возникло паразитного отражения, не должно быть резкого
изменения ε и μ при переходе от слоя к слою.
Применение многослойных покрытий расширяет их диапазонность. Толщина
материала определяет диапазон частот, в котором происходит поглощение энергии.
Верхний (входной) слой градиентных радиопоглощающих материалов обычно состоит из
материалов, имеющих диэлектрическою проницаемость, близкую к единице, для
обеспечения согласования с электрическими параметра ми свободного пространства.
Радиопоглощающие покрытия обладают относительно небольшой диапазонностыо
и значительной массой, что ограничивает их массовое применение. В связи с этим
покрытия наносят в основном на те части боевой техники, которые в наибольшей степени
отражают ЭМВ (блестящие точки).
Малоподвижные или неподвижные объекты и сооружения (здания, мосты,
корабли) могут покрываться для снижения ЭПР широкодиапазонными поглощающими
покрытиями из пористого каучука, смешанного с угольной пылью, или из
пенополистирола, покрытого угольной пленкой. Такие материалы имеют шероховатую
поверхность, в результате чего интенсивность отражения мало зависит от угла падения.
Их коэффициент отражения не превышает 1 % по мощности.
Здания можно маскировать, покрывая стены пористым бетоном с примесью
графита или многослойными материалами, имеющими поры и зерна различной величины.
Размеры зерен постепенно уменьшаются от 20 до 1,0 мм.
Большое внимание уделяется исследованию плазмы как поглощающей среды
энергии электромагнитных волн. Делались попытки создать специальные
радиопоглощающие краски и ткани. В Канаде, например, изготовлена краска,
предназначенная для покрытия ракет и самолетов, но при испытаниях она оказалась
недостаточно эффективной. В ФРГ разработана радиопоглощающая ткань, из которой
изготавливают маскирующее полотно, имеющее слоистую сетчатую структуру. Ячейки
ткани наполнены графитовым порошком вместе со связующей массой. Ткань состоит из
трех пли пяти слоев, имеющих различные размеры ячеек. Полотнищами такой ткани
предполагается маскировать от радиолокационного и визуально-оптического
обнаружения танки, орудия, ракетные установки, самолеты и другую военную технику.
3.9.6. Неотражающие структуры [4]
Неотражающие структуры могут быть построены на базе антенных решеток,
конструкций с большим числом дифракционных элементов и неотражающих проводящих
поверхностей сложной формы. Они формируют диаграмму рассеяния с минимумом в
направлении приема.
Простейшим
неотражающим
устройством
может
служить
противорадиолокационный экран из проводящего материала, устанавливаемый наклонно
к направлению прихода волны. Максимум переотраженной энергии направлен в сторону
от источника излучения. В обратном направлении имеет место лишь незначительное
излучение за счет дифракционных явлений второго и более высоких порядков.
Другим известным неотражающим устройством является про водящее тело с
вырезанными в нем канавками глубиной четверть длины волны (рис.3.51). Если ступеньки
имеют высоту, кратную целому числу полуволн, то такая структура отражает волны, как
идеальное зеркало, когда электрический вектор перпендикулярен ребру ступеньки
(нормальное падение).
280
h/4
Рис.3.51. Конструкция неотражающей структуры с вырезанными канавками
Минимум отраженной энергии для волн с произвольным положением плоскости
поляризации может быть получен при применении ребристой структуры, у которой
углубления и ступеньки чередуются в шахматном порядке (две системы взаимно
ортогональных канавок). Хорошие результаты получаются, когда на отражающей
поверхности в шахматном порядке располагаются дифракционные элементы с
полусферической головкой (рис.3.52). Такое покрытие имеет лучшие диапазонные
характеристики за счет расположения дифракционных элементов на различной высоте от
подложки.
Малую массу и габариты имеют резонансные покрытия, являющиеся комбинацией
антенных решеток и интерференционных многослойных покрытий [4].
Рис.3.52. Конструкция неотражающей структуры с дифракционными элементами с
полусферической головкой
В многослойном интерференционном покрытии роль поглотителя играет
резистивная пленка, которая может быть заменена решеткой из диполей, нагруженных на
резисторы. Для расширения диапазонных свойств покрытия применяют набор диполей
разной длины. Диполи располагают на различных расстояниях от отражающей
поверхности. Применение двух взаимно перпендикулярных решеток исключает
зависимость отражающей способности структуры от поляризации падающих волн.
Неотражающие структуры имеют те же достоинства и недостатки, что и
интерференционные покрытия [4].
3.9.7. Покрытия на эффекте полного прохождения волны во вторую среду [4]
Этот тип покрытий основан на свойстве некоторых материалов не отражать волны,
падающие под углом, называемым углом Брюстера (рис.3.53).
281
z
п
E0
Rв=0
1
S
пр
2
или
пр
y
E0
Рис.3.53. Эффект полного прохождения электромагнитной волны во вторую среду
3.9.8. Малозаметный самолет типа "Стелс" [10]
Самолет типа "Стелс" - это новая система оружия, способная в значительной мере
снизить боевую эффективность рубежа ПВО на базе радиолокационной техники. При его
создании используется ряд технических приемов (изложенных в данном подразделе),
позволяющих достигнуть очень низкой ЭПР - настолько низкой, что самолет типа "Стелс"
называют самолетом – невидимкой [10, 45].
Средства обнаружения практически не в состоянии обнаружить самолет типа "Стелс".
Его инструкция предусматривает использование материалов и методов, перечисленных на
рис.. Они позволяют снизить до минимума уровни рассеянных и отраженных сигналов, а
также сосредотачивать их по нескольким направлениям, отличным от направления на
средства обнаружения.
По сравнению с другими методами стелс-технология позволяет добиться снижения
ЭПР в 1000 раз и более с соответственным уменьшением дальности действия РЛС до 17% и
менее.
В основе этой технологии лежат следующие принципы [10, 45]:
1. Использование радиопоглощающих материалов для покрытия тех металлических
частей, которые вызывают интенсивное рассеяние, например, соединяющиеся
кромки воздухозаборников турбинных двигателей.
2. Использование синтетических материалов, прозрачных для СВЧ излучения
(например, углеродное волокно), для изготовления больших поверхностей
(например, крыльев).
3. Придание такой конфигурации, которая обеспечивает минимальное рассеяние
концентрацией по нескольким направлениям, отличным от направления прихода
(например, кромки с минимально допустимыми наклонами, отсутствие двугранных
элементов, которые могут вести себя как уголковые отражатели, почти идеал! но
гладкие переходы между различными поверхностями).
4. Использование материалов зеркального типа с целью избежать эффектов
уголковых отражателей; например, введение очень тонких металлических нитей в
прозрачный материал фонаря кабины экипажа.
5. Применение активных систем для снижения ЭПР.
6. Снижение заметности в ИК области спектра и маскировка труб выпуска газов
посредством установки их в верхней части фюзеляжа.
7. Размещение средств поражения и средств РЭП внутри самолета.
На рис.3.54 приведен первый в мире самолет-невидимка F-117, разработанный по
технологии «Стелс» с учетом перечисленных выше принципов.
282
Рис.3.54. Самолет F-117А
Значительное уменьшение дальности действия РЛС в результате применения стелстехнологии ставит перед ПВО серьезные проблемы. Проблема заключается не только в
снижении уровня сигнала (ее можно решить посредством повышения чувствительности
приемника), но также и в том, что в виду экстремально малой ЭПР самолет становится
трудно отличить от насекомых и птиц. Если, к тому же, имеются мешающие отражения,
то выигрыш в отношении сигнал-шум у устройств СДЦ необходимо повысить на 30 дБ,
чтобы обнаружить столь малую цель, что может оказаться невозможным. Более того,
рубежи обороны должны, как правило, перекрывать друг друга, а уменьшение дальности
действия в результате уменьшения ЭПР приводит к образованию коридоров, через
которые самолеты типа "Стелс" может беспрепятственно проникать и подходить близко к
цели (рис.3.55). Чтобы восстановить непрерывную линию обороны (зоны, покрываемые
РЛС соприкасаются), число РЛС в системе ПВО, по-видимому, должно быть увеличено в
4 или 5 раз, а чтобы восстановить прежнюю зону действия (с перекрытием (см.рис.3.55)),
число РЛС должно быть увеличено в 16 ÷ 25 раз [10].
283
Рис.3.55. Зона действия РЛС сокращается из-за малой ЭПР самолетов типа "Стелс", в
результате его появляются серьезные бреши в системе ПВО
Это верно, если ЭПР самолета уменьшена одинаково во всех направлениях. Как
правило, значительного снижения ЭПР удается добиться только в узком секторе
углов в передней полусфере (прим. автора).
В виду малой ЭПР самолетов типа "Стелс" также упрощается проблема их
индивидуальной защиты, так как можно использовать передатчики помех с более низкой
эффективной мощностью излучения.
284
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.
Шлезингер Р.Дж. Радиоэлектронная война/ Перевод с англ. А.Б. Андреева и
И.М. Верещагина; под ред. А.М. Пархоменко.– М.: Воениздат, 1963.– 320 с.
2.
Бартон Д., Вард Г. Справочник по радиолокационным измерениям/ Пер с
англ. под ред. М.М. Вейсбейна. – М.: Сов. Радио 1976.– 392 с.
3.
Перунов Ю.М., Фомичев К.И., Юдин Л.М. Радиоэлектронное подавление
информационных каналов систем управления оружием/ Под ред. Перунова Ю.М. – М.:
Радиотехника, 2003.– 416с.
4.
Основы теории радиоэлектронной борьбы/ Под ред. Николенко Н.Ф. – М.,
1987.– 352 с.
5.
Цветнов В.В., Демин В.П., Куприянов А.И. Радиоэлектронная борьба:
радиоразведка и радиопротиводействие. – М.: МАИ, 1998.– 248 с.
6.
Цветнов В.В., Демин В.П., Куприянов А.И. Радиоэлектронная борьба:
радиомаскировка и помехозащита.– М.: МАИ, 1999.– 240 с.
7.
Атражев М.П., Ильин В.А., Марьин Н.П. Борьба с радиоэлектронными
средствами. – М.: Воениздат, 1972.– 278 с.
8.
Защита радиолокационных систем от помех/ Под ред. А.И.Канащинкова,
В.И.Меркулова. – М.: Радиотехника, 2003.– 416 с.
9.
Вартанесян В.А. Радиоэлектронная разведка. – М.: Воениздат.– 1993 (1975),
278 (255) с.
10.
Фелиппо Нери. Введение в системы радиоэлектронной защиты. – М.:
ОНТИПИ ФГУП ЦНРТИ, 2003.– 358 с.
11.
Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного
распознавания. – М.: Радио и связь, 1984.– 152 с.
12.
Бенжамин Р. Анализ радио- и гидролокационных сигналов (структура,
разрешение и обработка сигналов в радио- гидролокационных и других системах)/
Перевод с англ. О. Казакова и А. Лившиц; под ред. И.Е. Овсиевича. – М.: Воениздат,
1969.– 256 с.
13.
Соненберг Г.Д. Радиолокационные и навигационные системы/ Пер. с англ.–
Л.: Судостроение, 1982.– 400 с.
14.
Военно-исторический труд. К 100-летию радиоэлектронной борьбы.
Основные этапы развития 1904-2004/ Под общей ред. Осина А.В. – Воронеж, 2004.– 440
с.
15.
Служим военно-морскому флоту. Таганрогский научно-исследовательский
институт связи/ Под ред. Э.В.Чекрыгина.– Ростов-на-Дону: Изд. ООО «Южный
издательский дом», 2006.– 328 с.
16.
Майзельс Е.Н., Торгованов В.А. Измерение характеристик рассеяния
радиолокационных целей/ Под ред. М.А. Колосова. – М.: Сов. Радио, 1972.– 232 с.
17.
Кремер И.Я., Владимиров В.И., Карпухин В.И. Модулирующие
(мультипликативные) помехи и прием радиосигналов/ Под ред. И.Я. Времера. – М.: Сов.
Радио, 1972.– 480 с.
18.
Абчук В.А., Суздаль В.Г. Поиск объектов. – М.: Сов. Радио, 1977.– 336 с.
19.
Палий А.И. Радиоэлектронная борьба: (Средства и способы подавления и
защиты радиоэлектронных систем). – М.: Воениздат, 1981.– 320 с.
20.
Вакин
С.А.,
Шустов
Л.Н.
Основы
радиопротиводействия
и
радиоэлектронной разведки. – М.: Сов. Радио, 1968.– 448 с.
21.
Современная радиоэлектронная борьба. Вопросы метрологии / Под ред. В.Г.
Радзиевского. – М.: Радиотехника, 2006.– 424 с.
22.
Радзиевский В.Г., Сирота А.А. Теоретические основы радиоэлектронной
разведки. – М.: Радиотехника, 2004.– 432 с.
10
23.
Вопросы перспективной радиолокации. Коллективная монография / Под
ред. А.В. Соколова. – М.: Радиотехника, 2003.– 512 с.
24.
Модели технических разведок и угроз безопасности информации.
Коллективная монография / Под ред. Е.М.Сухарева. Кн.3 –М.: Радиотехника, 2003.– 144 с.
25.
Общесистемные вопросы защиты информации. Коллективная монография/
Под ред. Е.М.Сухарева. Кн.1. – М.: Радиотехника, 2003.– 296 с.
26.
Ананьин Э.В., Ваксман Р.Г., Патраков Ю.М. Методы снижения
радиолокационной заметности //Зарубежная радиоэлектроника. 1994. №4-5. С. 5-21.
27.
Корн Г., Корн Т. Справочник по математике для научных работников и
инженеров. – М.: Наука, 1970.– 720 с.
28.
Баскаков С.И, Радиотехнические цепи и сигналы: Учебник. – М.: Высш.
Школа, 1983.– 536 с.
29.
Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. М. Радио и
связь, 1984.
30.
Ветлинский В.Н., Ульянов Г.Н. Многоцелевые РЛС.– М.: Воениздат, 1975.
31.
Кобак В.О. Радиолокационные отражатели. – М.: Сов. радио, 1975.– 248с.
32.
Эффективная площадь отражения сложных радиолокационных объектов
(тематический выпуск)// ТИИЭР. 1989. Т.77. №5.
33.
Лагарьков А.Н., Погосян М.А. Фундаментальные и прикладные проблемы
стелс-технологий//Вестник российской академии наук. 2003. Т.73. №9. С.848.
34.
Захарьев Л.Н., Леманский А.А. Рассеяние волн «черными» телами. – М.:
Сов. Радио, 1972. –288с.
35.
Ландау Л.Д., Лифшиц Е.М. Теория поля. – М.: Физматгиз, 1960. –190с.
36.
Уфимцев П.Я. Дифракция электромагнитных волн на черных телах и
прозрачных пластинах//Изв. Вузов. Радиофизика. 1968. Т.11. №6. С.912.
37.
Марков Г.Т., Чаплин А.Ф. Возбуждение электромагнитных волн. –М.-Л.,
Энергия, 1967.
38.
Банков С.Е., Курушин А.А. Расчет излучающих структур с помощью FEKO.
М.:ЗАО «НПП «Родник», 2008.-248с.
39.
Справочник по антенной технике: Справочник в 5т. Т.1./Л.Д.Бахрах,
Л.С.Бененсот, Е.Г.Зелкин др.; Под ред. Я.Н.Фельда, Е.Г.Зелкина - М.: ИПРЖР, 1997.—256
с.
40.
Куприянов А.И., Сахаров А.В. Теоретические основы радиоэлектронной
борьбы: Учебное пособие/А.И.Куприянов, А.В.Сахаров.- М.: Вузовская книга, 2007.-356c.
41.
Привалова Т.Ю., Юханов Ю.В. Рассеяние плоской волны на двумерной
модели решетки Ван-Атта (Излучение и рассеяние электромагнитных волн.
Радиоэлектронные системы локации и связи. Монография)/ Под ред. В.А.Обуховца.
Антенны. 2007. Вып. 5 (120). С.23-28.
42.
Привалова Т.Ю., Синявский Г.П., Юханов Ю.В. Анализ характеристик
рассеяния двумерной решетки Ван-Атта // Электромагнитные волны и электронные
системы. 2007. Т.12. № 5. С.58-65.
43.
Привалова Т.Ю., Юханов Ю.В., Болов Р.Б. Дифракция плоской Еполяризованной волны на решетке Ван-Атта // Труды международной научной
конференции «Излучение и рассеяние ЭМВ ИРЭМВ-2009». Таганрог – Дивноморское, 26
июня – 2 июля 2009. С.83-87.
44.
Привалова Т.Ю., Юханов Ю.В. Рассеяние плоской Н-поляризованной волны
на решетке Ван-Атта с импедансным фланцем// Электромагнитные волны и электронные
системы. 2009. Т.14. № 7. С.66-69.
45.
Монин М.А., Ягудина И.М. Радиолокационная заметность самолетов (Обзор
по материалам открытой иностранной печати)//М.: ЦАГИ, 1986. 257с.
11