ПОВОРОТ ШАГАЮЩИХ МАШИН С ДВИЖИТЕЛЯМИ НА БАЗЕ
реклама

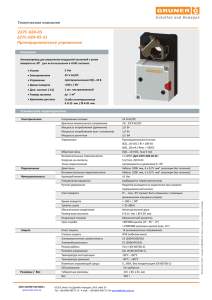
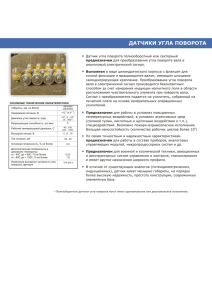
Реализованные проекты УДК 629.1.033.3 В.В.ЧЕРНЫШЕВ ПОВОРОТ ШАГАЮЩИХ МАШИН С ДВИЖИТЕЛЯМИ НА БАЗЕ ЦИКЛОВЫХ МЕХАНИЗМОВ* Введение При выполнении шагающими машинами и шагающими роботами транспортнотехнологических операций существует необходимость маневрирования. Важнейшей характеристикой маневренности является поворотливость. Одним из основных ее показателей является радиус поворота, за который принимают расстояние от мгновенного центра поворота до центра масс машины. Минимальный радиус поворота служит показателем оценки статической поворотливости. Динамическую поворотливость, кроме того, характеризуют время и угол поворота машины с заданным радиусом и скоростью движения. Энергетическую эффективность поворота, как правило, оценивают моментом сопротивления повороту. Для шагающих машин поворотливость зависит от типа шагающего движителя, схемы машины, системы управления движением, а также от размеров и расположения стоп. Различают два принципиально разных способа поворота — дискретный и непрерывный. Дискретный способ поворота осуществляется разделением движений корпуса и движителей с обязательными остановками. При непрерывном способе поворота изменение вектора скорости центра машины происходит без разрывов и остановок движения. Шагающие машины с адаптивным управлением могут реализовать движение в любом направлении по отношению к продольной оси машины, включая поворот на месте и передвижение боком. Возможности шагающих машин с цикловыми движителями по поворотливости существенно ниже. Поворот шагающей машины с цикловыми движителями может быть обеспечен либо путем изменения ориентации плоскостей шагания относительно корпуса, либо бортовым способом — путем изменения скорости движения одного из бортов (аналогично гусеничным машинам). В работе обсуждаются возможные способы осуществления поворота и новые механизмы поворота. Анализ базируется на результатах теоретических и экспериментальных исследований шагающих машин серии «Восьминог». 1. Поворот шагающих машин серии «Восьминог» Поворот шагающих машин серии «Восьминог» осуществляется бортовым способом с фиксированными радиусами R = 0 и R = B/2, где B — ширина колеи машины, за счёт остановки или реверсивного движения силового привода отстающего борта. Бортовой поворот с такими малыми радиусами реализуется по сцеплению не на всех грунтах и требует повышенных энергозатрат. Кроме того, при таком повороте разрушается экологически ранимый верхний почвенный слой из-за скольжения стоп по грунту. В робототехническом комплексе «Восьминог-М» (рис. 1), помимо бортового поворота, возможно осуществление смены направления движения с помощью дополнительных подъемно-поворотных механизмов [1], также использующихся при преодолении локальных препятствий, выполненных в виде двух независимо работающих домкратов с развитыми опорами, установленных на поворотном круге на днище машины (рис. 2). Подъемно-поворотные механизмы позволяют вывесить машину на домкратах и повернуть на поворотном круге на требуемый угол с нулевым радиусом с минимальными энергозатратами. Такие механизмы, строго говоря, не является механизмами поворота, так как они не обеспечивает криволинейное движение. Их можно Работа выполнена при поддержке программы Министерства образования и науки РФ «Развитие научного потенциала высшей школы (2006-2008 годы»). * 72 http://tmm.spbstu.ru Поворот шагающих машин с движителями на базе цикловых механизмов отнести, используя терминологию, принятую в [2], к механизмам смены направления движения. Рис. 1. Шагающий робототехнический комплекс «Восьминог-М» а) 2 1 б) 3 Рис. 2. Структурная схема шагающей машины «Восьминог-М»: 1 — корпус машины, 2 — шагающие движители, 3 — механизм преодоления локальных препятствий и смены направления движения В условиях неорганизованной поверхности алгоритм работы приводов при смене направления движения предполагает выполнение следующих процедур: — ориентацию опор подъёмных движителей по касательным к изогипсам опорной поверхности за счёт работы привода поворотного круга; — вывешивание машины в горизонтальном положении на подъёмных механизмах за счёт независимой работы их приводов; — поворот машины на требуемый угол относительно грунта за счёт работы привода поворотного круга; — опускание машины на стопы опор механизмов шагания за счёт работы приводов подъёмных механизмов; — ориентацию стоп подъёмных движителей в исходное транспортное положение за счёт работы привода поворота поворотного круга; — продолжение курсового движения в требуемом направлении. Анализ показывает, что с энергетической точки зрения бортовой поворот целесообразен при повороте машины на малый угол (порядка 3 – 5°, в зависимости от свойств грун- Теория Механизмов и Машин. 2007. №2. Том 5. 73 Реализованные проекты та). При большем угле поворота энергетически более выгодна смена направления движения с помощью подъёмно-поворотных механизмов. 2. Сопротивление бортовому повороту шагающей машины Испытания опытного образца шагающей машины «Восьминог» в условиях реальной местности указали на ограниченные возможности бортового поворота машины на вязких и тяжёлых грунтах [3, 4] из-за большого сопротивления повороту. На момент сопротивления повороту при бортовом способе его осуществления существенное влияние оказывает схема размещения ног (механизмов шагания) на корпусе машины. Минимальное количество ног, необходимое для статической устойчивости шагающих машин, равно четырем. В этом случае существует единственная походка, обеспечивающая устойчивость — поочередный перенос каждой опоры в новое положение. Для непрерывных походок минимальное количество ног равно шести. По этой причине наибольшее распространение получили машины с шестью и восьмью ногами. При размещении на корпусе 1 машины механизмов шагания 2 (рис. 3) возможны варианты их попарно поперечного группирования (схемы I и IV), последовательного (продольного) размещения вдоль корпуса машины (II) или смешанная схема (III), используемая при распределении основной части нагрузки на заднюю ось. Поперечное группирование ног затрудняет маневрирование при преодолении препятствий. При последовательном расположении механизмов упрощается их соединение с корпусом и подвод мощности; Рис. 3. Схемы размещения ног уменьшается зона уплотнения почвы. Вместе с тем продольная компоновка увеличивает длину машины. Большая опорная поверхность стопы обеспечивает снижение давления на грунт. Для шагающих машин, предназначенных для работы на слабых грунтах, уменьшение габаритов стопы не представляется возможным. Использование стоп с неразвитой опорной поверхностью, как показали полевые исследования механизма взаимодействия опорных элементов (стоп) шагающих машин со слабыми и экологическими ранимыми грунтами, приводит к снижению профильной проходимости. Это обусловлено, в основном, деформацией опорной поверхности, соразмерной с высотой подъема стопы в фазе переноса. Стремление снизить давление на грунт приводит к лыжеобразной конструкции стопы. Побортное объединение движителей с лыжеобразными стопами приводит к сходству поворота шагающих и гусеничных машин. Это позволяет использовать для шагающих машин, в условиях ограниченности опытных данных, эмпирические коэффициенты сопротивления повороту для гусеничных машин [5]. Для определения момента сопротивления повороту шагающей машины 1 выделим элементарную площадку (рис. 4) на опорной плоскости стопы 2 со сторонами dx и dy. При бортовом повороте она будет иметь поперечную составляющую скорости vy. Боковые перемещения точек стопы приводят к появлению дополнительных поперечных сил, действующих от грунта. Элементарная касательная сила, действующая на площадку со стороны грунта, равна dS k p dx dy , где k — коэффициент сопротивления повороту; Рис. 4. 74 p — давление стопы на грунт. Тогда момент сопротивления повороту находящейся на грунте j-той стопы будет равен http://tmm.spbstu.ru Поворот шагающих машин с движителями на базе цикловых механизмов M Ñj k p j x dy dx, (1) Añò где xj — координата центра j-той стопы; p j N j bl — давление на грунт; Nj — нормальная реакция грунта под j — той стопой; l и b — длина и ширина стопы. Момент сопротивления бортовому повороту n-ногой шагающей машины равен сумме моментов сопротивления повороту всех стоп, находящихся в опорной фазе n M Ñ U j M Ñj , (2) j 1 где Uj — единичная функция, характеризующая состояние j-той ноги, принимающая лишь два значения: 1 – при опоре ноги на грунт и 0 – при переносе ноги. Значения Nj определяются количеством и расположением опор, одновременно находящихся в фазе опоры на грунт. В зависимости от походки и способа изменения скорости борта при повороте возможны различные комбинации опор, находящихся на грунте. Например, для схемы I (см. рис. 3) при независимом приводе бортов с работающими в противофазе механизмами шагания будет иметь место походка: 1, 3, 5, 7 — 1, 3, 4, 5, 6, 7 — 1, 4, 6, 7 — 1, 2, 4, 6, 7, 8 — 2, 4, 6, 8, а при кинематической связи правого и левого бортов может реализоваться следующая последовательность перемены конечностей: 1, 3, 5, 7 — 1, 2, 3, 4, 5, 6, 7, 8 — 2, 4, 6, 8 (цифрами обозначены номера опор по часовой стрелке, начиная с передних, через запятую записаны опоры, одновременно находящиеся в фазе опоры на грунт). При определении момента сопротивления бортовому повороту шагающей машины рассматривались все возможные комбинации опор, обеспечивающие статическую устойчивость. Для определения реакций грунта Nj составлялись уравнения равновесия. Динамичностью процесса при определении реакций можно пренебречь. Уравнения составлялись относительно осей, лежащих в опорной плоскости; в этом случае из условий равновесия исключаются тангенциальные составляющие реакций: n n Fz G N j 0, j 1 j 1 n M j 1 n x N j B 2 0, (3) j 1 n n j 1 j 1 M y N j xj 0, где G — вес машины; B — ширина колеи машины. Если в опорной фазе одновременно находится более 3-х опор, то для однозначного определения реакций уравнения (3) дополнялись уравнениями совместности деформаций, основанными на том, что опорные точки механизмов шагания лежат в одной плоскости: xj x1 x2 x1 x3 x1 yj y1 z j z1 y2 y1 z2 z1 0, y3 y1 z3 z1 Теория Механизмов и Машин. 2007. №2. Том 5. (j 4 n) (4) 75 Реализованные проекты где x1, x2, x3, и y1, y2, y3 — координаты трех выбираемых произвольно, но не лежащих на одной прямой опор шагающей машины; Δzj — деформация грунта под j-й стопой. При использовании линейной модели грунта имеем еще n уравнений: Ni k zi (5) где k — жёсткость грунта. Совместное решение уравнений (3) – (5) позволяет определить все неизвестные реакции. При равномерном распределении давления по площади стопы, учитывая сделанные допущения, после интегрирования (1) из (2) получаем M C kñõ k GL , (6) где L — база машины, за которую принимаем расстояние между крайними точками первой и последней стопы; kñõ — коэффициент, учитывающий схему размещения движителей. Значения момента сопротивления повороту для равномерного распределения давления по стопе и L l 3 10 , что охватывает весь возможный диапазон длин l, для схем (I), (II) и схемы (III) (при нагрузке на заднюю ось 2 3 G ) представлены в табл. 1. Схема (IV) при повороте с малыми радиусами аналогична схеме (I). В табл. 1 для сравнения дан момент сопротивления повороту шагающих машин с большим числом ног. В этом случае он будет равен моменту сопротивления повороту гусеничных машин при равномерном распределении давления по длине гусеницы [5]. Таблица 1 Момент сопротивления повороту при бортовом способе его осуществления MС Попарно поперечное группирование опор (схема I) 0,330,45 kμGL Последовательное размещение опор (схема II) 0,210,24 kμGL Смешанная схема размещения опор (схема III) 0,280,40 kμGL Многоногие машины 0,25 kμGL Из табл. 1. видно, что в сравнении с гусеничными машинами снижение MС, причем незначительное, имеет место лишь при последовательном размещении опор. Использованная в экспериментальном образце шагающей машины «Восьминог» схема с попарно поперечным группированием ног имеет наибольший момент сопротивления повороту. Значительное увеличение при малых радиусах поворота суммарной силы тяги движителей забегающего борта делает необходимым проверку возможности поворота машины по сцеплению. Для шагающих движителей коэффициент свободной удельной силы тяги без учета сил инерции численно равен коэффициенту сцепления k движителя с грунтом. Для обеспечения поворота на горизонтальной поверхности при равномерном распределении веса машины на оба борта необходимо, чтобы соблюдалось неравенство k G 2 P2 , где P2 M C B — сила тяги движителей забегающего борта; B — ширина колеи. Тогда бортовой поворот машины без буксования стоп возможен при k 76 k 2 ( L B) kñõ . (7) http://tmm.spbstu.ru Поворот шагающих машин с движителями на базе цикловых механизмов Для опытного образца шагающей машины «Восьминог», выполненной по схеме (I) (см. рис. 3), с L B 2 и L l 3 , на размокшей дороге на глинистом грунте ( k 0, 2 ) поворот возможен, в соответствии с (7), при k 0,15 , а максимальное значение коэффициента сопротивления повороту для этого грунта kμ max= 0,3…0,4. Попытка поворота с малым радиусом на таком грунте приведет к полному буксованию стоп, что имело место при испытаниях опытного образца, имевшего фиксированные радиусы поворота R 0 и R B 2 . Таким образом, фиксированные радиусы поворота робота «Восьминог» существенно ограничивает его маневренность. Желательно предусмотреть возможность плавного регулирования радиуса поворота. 3. Поворот за счет изменения ориентации плоскостей шагания Поворот, осуществляемый изменением ориентации плоскостей шагания, менее энергоемок, чем бортовой и, в отличие от бортового, позволяет реализовать поворот, близкий к кинематически точному. Основной недостаток такого поворота, обусловленный дискретным характером взаимодействия стоп с грунтом, состоит в сложности системы управления. Например, схема поворота, представленная на рис. 5, а, требует при согласованном повороте плоскостей шагания передних движителей (на угол Ψ1 и Ψ2) одновременного управления скоростями всех движителей в функции от углов Ψ1, Ψ2 и радиуса поворота R. б) а) Рис. 5. Поворот шагающей машины за счет изменения ориентации плоскостей шагания передних движителей Если при повороте сохранять скорость прямолинейного движения центра машины, то из условия совпадения мгновенных скоростей передних движителей и корпуса скорость шагающих движителей должна быть равна: v1 vC L , R sin 1 v2 vC L , R sin 2 v L cos 2 v3 C , R sin 2 v4 (8) vC L cos 1 . R sin 1 Для осуществления поворота с минимальным проскальзыванием и срезом грунта был разработан механизм поворота [6], схема которого представлена на рис. 5, б. В этом случае передние движители расположены на общей поворотной балке и присоединены к корпусу с помощью двухстепенного шарнира. Первая степень свободы шарнира обеспечи- Теория Механизмов и Машин. 2007. №2. Том 5. 77 Реализованные проекты вает балке с движителями возможность поворота в плоскости движения. Вторая степень свободы служит для присоединения поворотной балки к корпусу посредством торсиона, который обеспечивает улучшенную адаптацию стоп к неровностям опорной поверхности. Изменение ориентации плоскостей шагания движителей осуществляется за счет поворота передней балки путем согласованного изменения угловых скоростей независимо управляемых асинхронных электродвигателей с частотным регулированием. В этом случае для совпадения мгновенных скоростей передней поворотной оси и корпуса скорость шагающих движителей должна удовлетворять условиям: L B , sin 12 2 v L B v2 C , R sin 12 2 v1 vC R (9) v L cos 12 B v3 C , R sin 12 2 v L cos 12 B v4 C . R sin 12 2 В данной схеме поворота по сравнению со схемой, показанной на рис. 5, а, число управляемых параметров уменьшается — необходимо лишь согласованное управление скоростями всех движителей в функции от радиуса поворота (угол Ψ12 не требует управления). Результаты математического моделирования [7, 8] свидетельствуют о возможности обеспечения курсовой устойчивости движения в этом случае. Вместе с тем, как показала конструктивная проработка, такая схема может обеспечить поворот с радиусами от до Rmin= 9 м. Меньшие радиусы (B и B/2) могут быть реализованы только бортовым способом из-за ограничений, накладываемых конструкцией на угол поворота Ψ12 передней балки. Обе рассмотренные схемы поворота из-за сложности системы управления не вписываются в концепцию проектирования простого и надежного шагающего шасси. 4. Механизм поворота на базе асинхронной карданной передачи Фиксированные радиусы поворота шагающей машины «Восьминог» существенно ограничивают ее маневренность. Желательно иметь возможность плавного регулирования радиуса поворота. Для этого был разработан новый механизма поворота (рис. 6) на основе асинхронной карданной передачи с изменяемым углом наклона промежуточного вала [9, 10]. Механизм позволяет без изменения конструкции хорошо себя зарекомендовавших цикловых движителей повысить маневренность шагающей машины и может выполнять ряд дополнительных функций. Принцип работы механизма поворота основан на изменении закона движения опорных точек шагающего движителя по траектории. Механизм поворота содержит асинхронные карданные передачи 1, связывающие силовой привод 2, расположенный на корпусе 3 машины, и шагающие движители, попарно установленные на несущих балках 4 правого и левого бортов. Несущие балки 4 соединены с корпусом 3 рычажной подвеской 5. Изменение угла наклона γ рычагов подвески 5 и промежуточного вала карданной передачи 1 осуществляется оператором машины посредством силового гидроцилиндра 6. Выходной вал карданной передачи связан через бортовой редуктор 7 с ведущим кривошипом механизма шагания 8. Для обеспечения ускоренного движения стопы в фазе переноса вилки промежуточного вала карданной передачи 1 расположены во взаимно перпендикулярных плоскостях, чем достигается неравномерность вращения выходного вала передачи. Взаимное расположение вилки ведомого вала передачи и кривошипа 78 http://tmm.spbstu.ru Поворот шагающих машин с движителями на базе цикловых механизмов выбирается так, что при наибольшей угловой скорости ведомого вала кривошип занимает положение, при котором опорная точка механизма шагания находится в фазе переноса. б) в) а) Рис. 6. Схема механизма поворота (а) и закон движения опорной точки по траектория при γ =0° (б) и γ°=45° (в): 1 — асинхронная карданная передача; 2 — силовой привод; 3 — корпус шагающей машины; 4 — несущие балки; 5 — рычажная подвеска; 6 — силовой гидроцилиндр; 7 — бортовой редуктор; 8 — ведущий кривошип механизма шагания. Изменение закона движения опорных точек механизмов шагания по траектории обеспечивается неравномерностью вращения выходного вала асинхронной карданной передачи. При равномерном вращении ведущего вала карданной передачи вращение промежуточного вала будет неравномерным. Неравномерность возрастает с увеличением угла наклона осей валов γ и усиливается после второго шарнира Кардана – Гука. Асинхронная карданная передача имеет за цикл два участка с ускоренным вращением ведомого вала. Для нормальной работы механизмов шагания необходима одна фаза ускоренного вращения ведущего кривошипа за цикл, соответствующая фазе переноса. Поэтому передаточное отношение бортовых редукторов выбиралось равным iбр 0,5 . В этом случае за один оборот ведущего вала карданной передачи происходит два оборота кривошипа механизма шагания и, соответственно, два шага. Поворот шагающей машины можно осуществить либо уменьшением угла наклона γ2 промежуточного вала карданной передачи забегающего борта, либо увеличением угла наклона γ1 карданной передачи отстающего борта. Поворот требует дополнительных затрат мощности, поэтому второй способ, при котором скорость центра машины и энергозатраты на передвижение уменьшаются, предпочтительней. При увеличении угла γ закон движения опорных точек по траектории меняется — скорость в фазе переноса растет, а в опорной фазе имеет место ее снижение. В результате уменьшается курсовая скорость отстающего борта, за счет чего и осуществляется поворот. На рис. 6, б и в показан характер изменения закона движения опорной точки механизма шагания по траектории при изменении угла γ. На траектории точки расставлены через равные интервалы времени ( 1 24 цикла), точки с заливкой соответствуют опорной фазе. Кинематические зависимости радиуса поворота шагающей машины от угла наклона γ1 промежуточного вала карданной передачи отстающего борта при γ2 = const представлены на рис. 7. Радиусы поворота на рис. 7 представлены в виде относительной величины ρ, у которой за единицу принята половина ширины колеи машины B/2. Механизм поворота позволяет плавно изменять радиус поворота от до 3 5 м . Меньшие радиусы (ρ = 0 и ρ = 1) могут быть реализованы бортовым способом поворота. Помимо основной функции, механизм поворота может выполнять и дополнительные. В частности, синхронное изменение угла наклона промежуточных валов карданной передачи правого и левого борта приводит к плавному изменению скорости передвижения машины. Таким способом можно менять скорость передвижения в 1,5 — 2 раза. Теория Механизмов и Машин. 2007. №2. Том 5. 79 Реализованные проекты Кроме того, ускоренный перенос опорной точки позволяет использовать в качестве опорного участок траектории (рис. 6, в) с почти равномерным движением опорной точки и практически горизонтальный. В результате курсовое движение становится более равномерным, а амплитуда вертикальных колебаний корпуса уменьшается. Рис. 7. Зависимости относительного радиуса поворота ρ от угла наклона γ1 промежуточного вала асинхронной карданной передачи отстающего борта при γ2= 0° (кривая 1), γ2= 20° (кривая 2); γ2= 35° (кривая 3) Зависимость от угла γ коэффициента неравномерности курсового движения kvx (vx max vx min ) vx , где vx max, vx min, vx — максимальное, минимальное и среднее значение курсовой скорости соответственно, и коэффициента, характеризующего вертикальные колебания корпуса kvz vz max vx , где vz max — максимальное значение вертикальной скорости машины, представлены в табл. 2. Таблица 2 Зависимости коэффициентов неравномерности kvx и kvz от угла γ γ, kvx kvz 0 0,835 0,358 5 0,834 0,365 10 0,782 0,364 15 0,698 0,360 20 0,586 0,353 25 0,454 0,340 30 0,317 0,320 35 0,203 0,288 40 0,178 0,246 45 0,335 0,195 Наибольший эффект, как это видно из табл. 2, имеет место при увеличении γ до 40 - 45°. В этом случае неравномерность курсового движения уменьшается в 4 — 4,5 раза, а скорость вертикальных колебаний корпуса снижаются до 20 — 25 % от курсовой скорости. Кроме того, силовые гидроцилиндры механизма поворота (рис. 6) позволяют на базе рычажной подвески организовать систему горизонтальной установки корпуса, которая достигается путём варьирования углов наклона γ рычагов подвески правого и левого бортов. Это повышает функциональные возможности установленного на машине грузового манипуляционного оборудования и позволяет работать в условиях большого уклона местности. 5. Поворот за счет поворотной трансформации траектории опорной точки Поворот шагающей машины с цикловыми движителями может быть реализован за счет изменения длины шага одного из бортов. Изменить длину шага в определенных пределах можно путем трансформации траектории опорной точки механизма шагания. На базе движителя шагающего робота «Восьминог» разработан ряд схем шагающих движителей [11, 12] с функциями механизма поворота. Одна из схем приведена на рис. 8. 80 http://tmm.spbstu.ru Поворот шагающих машин с движителями на базе цикловых механизмов Движитель содержит дополнительную поворотную коленчатую ось 5, общую для каждой пары механизмов шагания, на которой шарнирно закреплены точки O1 подвеса звеньев 3. Управление сводится к изменению углового положения звена 5 с помощью силового гидроцилиндра 6. Поворот коленчатой оси приводит к смещению точки подвеса коромысла 3 (из положения O1 в положение O1 ) и трансформированию базовой траектории I в траекторию II (рис. 8, б). В результате увеличивается максимальная высота шага (с H1 до H2), что повышает возможности движителя по профильной проходимости. Также имеет место уменьшение длины шага (с LI до LII), и механизм может дополнительно выполнять функции механизма поворота. При этом движитель остается одностепенным. а) б) Рис. 8. Схема шагающего движителя с функциями механизма поворота (а) и трансформация траектории опорной точки при повороте (б): 1 — ведущий кривошип механизма шагания; 2 — Г-образный шатун (опорное звено); 3 — коромысло; 4 — стопа; 5 — коленчатая ось; 6 — силовой гидроцилиндр Изменение длины шага происходит в основном за счет реверсивного движения шагающей опоры на участке 14–17. Кинематический анализ механизма показывает, что предложенный способ позволяет плавно изменять относительный радиус от до 2 3 м . Меньшие радиусы (ρ = 0 и ρ = 1) могут быть реализованы бортовым способом. К очевидным недостаткам рассмотренного способа реализации поворота надо отнести некоторое усложнение конструкции движителя из-за необходимости дополнительного привода. Другой недостаток заключается в сложной нелинейной зависимости длины шага от угла поворота коленчатой оси, что существенно усложняет задачу управления машиной. 5. Бортовой поворот шагающей машины в статически неустойчивом положении Благодаря периодическому и дискретному взаимодействию стоп с опорной поверхностью существует возможность реализовать бортовой поворот с малыми радиусами на любом грунте [12]. Рассмотрим, например, поворот шагающей машины по схеме II (см. рис. 3) с радиусом R B 2 . При правом повороте движение машины (рис. 9) может происходить вокруг следующих остановленных опор отстающего борта: либо 3, либо 2 и 4, либо 2, 3 и 4. В последних двух случаях и при повороте вокруг неподвижной опоры 3 ту половину цикла, когда на грунте находятся 1-я и 5-я стопы забегающего борта, MC определяется формулой (6). Вторую половину цикла, когда опоры 1 и 5 находятся в переносе, на грунте должны находиться только две стопы — 3-я и 6-я. При шарнирном закреплении стоп и смещении центра масс машины ( xC 0 ) от линии действия нормальных реакций N3 и N6 (см. рис. 9) Теория Механизмов и Машин. 2007. №2. Том 5. 81 Реализованные проекты для обеспечения статической устойчивости машины необходимо иметь как минимум еще одну дополнительную точку опоры. Рис. 9. Бортовой поворот шагающей машины в статически неустойчивом положении В результате машина опустится на грунт одной (или двумя) стопами, находящимися в фазе переноса. На рис. 9 это 1-я стопа, которая будет двигаться юзом. При этом момент сопротивления повороту будет складываться из моментов сопротивления повороту 3-й и 6-й стопы — MC3 и MC6, соответственно, а также момента сопротивлению повороту MC1 1-й стопы и момента от силы сцепления P1 k N1 этой стопы с грунтом. Учитывая, что в рассматриваемом случае M C 3 k l N3 8 , M C 6 k l N 6 8 и M C1 k N1 ( L l ) 2 , получаем: MC k l N3 8 k l N 6 8 k N1 ( L l ) 2 k N1B. (10) При малых значениях xC реакция N1 N 6 , и двумя последними слагаемыми (моментом MC1 и моментом от силы P1) в (11) можно пренебречь. Учитывая, что при этом N 6 N 3 G 2 , получаем M C k G l 8. (11) Тогда при L l 3 10 момент сопротивления бортовому повороту шагающей машины будет лежать в пределах M C 0,01 0,04 k GL , что на порядок меньше, чем для всех схем размещения шагающих движителей (табл. 1.) и гусеничных машин. Таким образом, благодаря периодическому и дискретному взаимодействию стоп с опорной поверхностью существует возможность при соответствующем управлении постепенно, с перерывами в пол цикла, реализовать поворот шагающей машины с малыми радиусами на любом грунте. Аналогичного эффекта можно добиться и при других малых радиусах поворота, когда скорость забегающего борта v2 существенно больше скорости отстающего борта v1. Причем для снижения момента сопротивления повороту шагающей машины предпочтительна схема последовательного (продольного) размещения ног вдоль корпуса. 82 http://tmm.spbstu.ru Поворот шагающих машин с движителями на базе цикловых механизмов Заключение Возможности бортового поворота шагающей машины с цикловыми движителями ограничены из-за большого момента сопротивления повороту. Кроме того, бортовой поворот шагающей машины реализуется по сцеплению не на всех грунтах. Поворот за счет изменения ориентации плоскостей шагания сводит к минимуму энергозатраты на поворот, а также проскальзывание и срез грунта. Однако из-за сложности системы управления указанный способ поворота не вписывается в концепцию проектирования простого и надежного шагающего шасси. Эффективность бортового поворота может быть существенно повышена при использовании новых механизмов поворота, специально разработанных для шагающих машин. Принцип действия механизмов поворота, в частности, может быть основан на управлении движением опорных точек по траектории или на целенаправленной трансформации формы самой траектории. Механизмы шагания в этом случае будут оставаться одностепенными и могут выполнять дополнительные функции (изменять параметры шага при встрече с препятствием для успешного его прохождения, бесступенчато регулировать скорость передвижения в некоторых пределах, снижать неравномерность движения, вызванного самим шагающим способом передвижения и др.). Бортовой поворот шагающей машины в статически неустойчивом положении при соответствующем управлении, благодаря периодическому и дискретному взаимодействию стоп с опорной поверхностью, может обеспечить снижение момента сопротивления повороту на порядок, что позволяет реализовать ступенчатый поворот с малыми радиусами на любом грунте. СПИСОК ЛИТЕРАТУРЫ 1. Основы расчета и проектирования шагающих машин с цикловыми движителями: монография / Брискин Е.С., Жога В.В., Чернышев В.В., Малолетов А.В. – М.: Машиностроение, 2006. – 164 с. 2. Планетоходы / Под. ред. Кемурджиана А.Л. – М.: Машиностроение, 1982. – 319 c. 3. Чернышев В.В. Сопротивление бортовому повороту шагающей машины //Тракторы и сельскохозяйственные машины. 2003. № 2. C.24–27. 4. О повороте шагающих машин с движителями на основе цикловых механизмов шагания / Брискин Е.С., Чернышев В.В., Малолетов А.В. и др. // Мобильные роботы и мехатронные системы: Мат. науч. шк.-конф. / М.: МГУ, 2001. C.152–163. 5. Забавников Н.А. Основы теории транспортных гусеничных машин. – М.: Машиностроение, 1975. – 448 с. 6. Шагающая опора для транспортных средств повышенной проходимости: Пат.2239577 РФ, В62D57/032 /Чернышев В.В., Брискин Е.С., Тельдеков А.В. 2004. 7. Мобильный робототехнический комплекс на базе многоопорной шагающей машины /Брискин Е.С., Чернышев В.В., Малолетов А.В., Тельдеков А.В. // Мехатроника: Механика. Автоматика. Электроника. Информатика. 2001. №3. С.19–27 8. Чернышев В.В., Брискин Е.С., Буданов В.М., Девянин Е.А. и др. Особенности управления и стабилизации положения корпуса многоногих статически устойчивых шагающих машин // Мобильные роботы и мехатронные системы: Мат. науч. шк.конф. / М.: МГУ, 2000. C.256–273. 9. Чернышев В.В., Малолетов А.В. Многофункциональный механизм поворота для транспортно-технологических шагающих машин // Известия вузов. Машиностроение. 2001. №1. С.48–52. 10. Шагающая опора для многоопорных транспортно-погрузочных средств повышенной проходимости: Пат. 2171194 РФ, В62 D57/032 / Чернышев В.В., Брискин Е.С., Малолетов А.В. 2001. Теория Механизмов и Машин. 2007. №2. Том 5. 83 Реализованные проекты 11. Шагающая опора для транспортных средств повышенной проходимости: Пат. 2207583 РФ, В62 D57/032 / Чернышев В.В., Брискин Е.С., Савин А.Ю. 2003. 12. Чернышев В.В. Системы частичной адаптации, подрессоривания и поворота шагающих машин с движителями на основе цикловых механизмов // Мобильные роботы и мехатронные системы: Матер. науч. шк.-конф. / М.: МГУ, 2002. C.181–196. Поступила в редакцию 23.04.2007 84 http://tmm.spbstu.ru