Формирование математических моделей электрических цепей
реклама

Формирование математических моделей электрических цепей
Одним из наиболее распространенных методов формирования и реализации
математических моделей электрических цепей является метод переменных состояний.
Его применение предполагает разделение всех относящихся к схеме электрической цепи
переменных на три множества:
множество входных переменных U {U 1 ,U 2 ,...,U P } ;
множество выходных переменных Y { y1 , y 2 ,..., y k } ;
множество переменных состояния X {x1 , x2 ,..., xn } .
В качестве входных переменных рассматривают задающие напряжения
e(t ) идеальных источников напряжения и задающие точки j (t ) идеальных источников
тока, в качестве переменных состояния – точки в индуктивностях i L (t ) и напряжения на
емкостях U C (t ) , в качестве выходных – все остальные точки и напряжения, которые
необходимо определить при расчете.
Для схемы электрической цепи рисунка 3 входными переменными являются
E1 , E2 , j1 , j2 : U {E1 , E2 , j1 , j2 } .
К
переменным
состояния
относятся
iL1 , iL 2 , uC1 , uC 2 : X {iL1 , iL 2 , uC1 , uC 2 }. Выходными же переменными могут быть все
остальные точки и напряжения. Например, если при расчете требуется определить точки,
протекающие через источник напряжения E 2 и емкость C1 , а также падение напряжения
на сопротивлении R2 , то эти токи и напряжение и будут выходными переменными:
Y {iE 2 , iC1 , u R 2 } .
Математическая модель электрической цепи в методе переменных состояния
формируется в виде системы дифференциальных уравнений первого порядка, записанных
в нормальной форме (форме Коши):
dx1
dt g1 (t , x1 ,..., xn );
dx2 g (t , x ,..., x );
2
1
n
dt
...............................;
dxn g (t , x ,..., x ).
n
1
n
dt
(7)
Систему дифференциальных уравнений (7) удобно представлять в матричном виде:
dX
G (t , X ),
dt
вектор-столбец
переменных
X [ x1 , x2 ,..., xn ]T
T
G(t , X ) [ g1 (t , X ), g 2 (t , X ),..., g n (t , X )] - n-мерная вектор-функция.
где
(8)
состояния;
При
необходимости
определения
выходных
переменных
система
дифференциальных уравнений дополняется системой алгебраических уравнений,
связывающих выходные переменные с входными и переменными состояния:
F ( X ,Y ,U ) 0,
(9)
вектор-столбец
выходных
переменных;
Y [ y1 , y2 ,..., yk ]T
T
F ( X ,Y ,U ) [ f1 ( X ,Y ,U ), f 2 ( X ,Y ,U ),..., f k ( X ,Y ,U )] - k-мерная вектор-функция.
где
Для линейной электрической цепи с постоянными параметрами математическая
модель определяется системой :
dX (t )
AX (t ) BU (t ),
dt
Y (t ) CX (t ) DU (t ),
(10)
где A,B,C,D - матрицы постоянных коэффициентов уравнений, причем A - квадратная
матрица n-го порядка (n – количество переменных состояния), B – матрица размером
n p (p - количество входных переменных); C – матрица размером k n (k – количество
выходных переменных), D – матрица размером k p.
Основой формирования математических моделей электрических цепей,
содержащих двухполюсные элементы с постоянными параметрами, являются первый и
второй законы Кирхгофа и компонентные соотношения (1),(2) для резистивных,
индуктивных и емкостных элементов.
При этом на первом этапе составляется система уравнений:
dI L
UL;
dt
dU C
C
IC ;
dt
RI R U R ;
( I L ,U C ,U L , I C , I R ,U R , t ) 0.
L
(11)
Здесь I L , I R , I C - векторы токов индуктивностей, сопротивлений и емкостей
соответственно; U L ,U R ,U C - векторы падений напряжения на индуктивностях,
сопротивлениях, емкостях; L, C, R - диагональные матрицы индуктивностей, емкостей,
сопротивлений; - вектор, элементы которого являются функциями указанных
переменных.
Первые два матричных уравнения представляют собой систему дифференциальных
уравнений относительно переменных состояния, а два последних – систему
алгебраических уравнений, связывающих переменные состояния с остальными
переменными.
На втором этапе формирования математической модели систему уравнений (11)
преобразовывают к системе только дифференциальных уравнений относительно
переменных состояния и входных переменных. Для этого из системы алгебраических
уравнений выражаются переменные U L и I C через переменные состояния и входные
переменные и подставляют их в правые части дифференциальных уравнений из (11).
Однако при этом возможны осложнения, вызванные неполнотой системы алгебраических
уравнений. Если система алгебраических уравнений в (11) полная, то есть количество
переменных U I , I C , I R ,U R равно количеству уравнений и система разрешима
относительно указанных переменных, то преобразование модели к системе только
дифференциальных уравнений возможно, а порядок системы дифференциальных
уравнений будет равен числу реактивных элементов в схеме. Если же система
алгебраических уравнений неполная, то преобразование к системе только
дифференциальных уравнений возможно, однако порядок системы дифференциальных
уравнений будет меньше числа реактивных элементов цепи. Такие цепи носят название
топологически вырожденных.
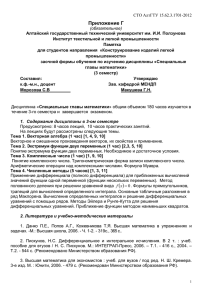
Пример формирования методом переменных состояния математической модели
линейной электрической цепи с постоянными параметрами, схема замещения которой
изображена на рисунке 4, приведен в файле example.doc.
Рисунок 4. Схема замещения с указанием выбранных направлений токов на
контурах.
К достоинствам метода переменных состояния, обусловившим его популярность,
следует отнести широкое привлечение аппарата матричной алгебры на всех этапах
формирования и реализации математических моделей, позволяющее подходить к анализу
электрических цепей с единых позиций в общей форме, а также существование
эффективных машинных методов решения систем дифференциальных уравнений первого
порядка. Кроме того, число уравнений в методе переменных состояния часто оказывается
меньше, чем при использовании других подходов.
Аналитический метод реализации математических моделей
Аналитический метод реализации математических моделей линейных
электрических цепей заключается в решении системы линейных неоднородных
дифференциальных уравнений первого порядка (10) в аналитической форме.
Из теории дифференциальных уравнений известно, что общее решение системы
линейных неоднородных дифференциальных уравнений X O.H . (t ) можно представить как
сумму общего решения соответствующей системы линейных однородных
дифференциальных уравнений X O.O. (t ) и частного решения системы линейных
неоднородных дифференциальных уравнений X C (t ) :
X O.H . (t ) X O.O. (t ) X C (t ),
(12)
где X O.H . (t ), X O.O. (t ), X C (t ) - векторы переменных состояния.
Частное решение системы неоднородных дифференциальных уравнений X C (t )
характеризует установившееся (стационарное) состояние цепи и носит название
принуждённой составляющей. Вид частного решения системы линейных неоднородных
дифференциальных уравнений первого порядка (10) определяется вектором входных
переменных U(t).
При U (t ) U const частное решение X C (t ) X C const . Подставляя его в
систему (10) и принимая во внимание, что производная от постоянной величины равна
нулю, получаем:
dX C
AX C BU 0,
dt
откуда
X C A 1 BU .
(13)
Система линейных однородных дифференциальных уравнений первого порядка,
соответствующая системе (10), имеет вид:
dX (t )
AX .
(14)
dt
Её общее решение в матричной форме записывается так:
X O.O. (t ) e At C ,
(15)
где А – квадратная матрица постоянных коэффициентов математической модели; С –
вектор констант интегрирования; e At - экспоненциальная матрица.
Понятие экспоненциальной матрицы. Экспоненциальной матрицей (матричной
At
экспонентой) e называют квадратную матрицу, определяемую как сумму ряда
Ak t k
A 2 t 2 A3t 3
e
E At
...,
k!
2
6
k 0
At
K
где k! 1 2 3 ... (k 1) k - k-факториал; A A;
k
(16)
AO E ; Е – единичная
i 1
матрица.
Из (16) видно, что при t=0 e E.
Точное вычисление матричной экспоненты по (16) не представляется возможным,
так как сумма содержит бесконечное число слагаемых, однако для этой цели можно
воспользоваться формулой Сильвестра:
AO
n n
A k E t
e ,
(17)
e At
i 1 k 1 i k
k i
где n - порядок матрицы А, i - собственные числа матрицы А, Е- единичная матрица.
i
Для матрицы А второго порядка формула Сильвестра принимает вид
в случае действительных различных собственных чисел:
e At
( A 2 E ) t ( A 1 E ) t
e
e ,
(1 2 )
(2 1 )
1
2
(18)
в случае комплексно-сопряженных собственных чисел:
e At Ee t cos( j t )
R
1
j
( A R E )e t sin( j t ).
R
(19)
Вектор С постоянных интегрирования в (15) определяется из начальных условий. В
общем виде начальные условия запишем в виде: X (t 0 ) X 0 . Для простоты положим
t 0 0. Тогда X (0) e AOC X C EC X C , откуда находим:
C X (0) X C .
(20)
При нулевых начальных условиях имеем:
C XC.
(21)
Общее решение X O.O. (t ) e C системы линейных однородных дифференциальных
At
уравнений характеризует поведение электрической цепи в переходном режиме при
отсутствии внешних источников электрической энергии и при заданных начальных
условиях и называется свободной составляющей. Из (18) и (19) видно, что вид свободной
составляющей определяется собственными числами матрицы А математической модели,
поэтому собственные числа матрицы А несут в себе важную информацию о переходном
процессе в цепи. По ним можно сделать вывод о том, сходится переходный процесс к
установившемуся состоянию или расходится, определить характер переходного процесса
(апериодический или колебательный), постоянные времени цепи, частоты собственных
колебаний (для колебательного переходного процесса) и оценить время переходного
процесса.
Так, для сходимости переходного процесса необходимо, чтобы свободная
составляющая с ростом времени стремилась к нулю. Из (18) и (19) видно, что это
возможно только в случае, если вещественные собственные числа отрицательны, а
комплексные имеют отрицательные вещественные части.
Если собственные числа матрицы А математической модели вещественные и
различны, то характер переходного процесса в цепи апериодический, если же собственные
числа комплексные - переходный процесс колебательный.
Скорость затухания свободной составляющей в переходном режиме оценивают
величинами, называемыми постоянными времени, которые определяются следующим
образом:
для вещественных собственных чисел
i
где
1
i
, i 1, n ,
(22)
i - i-oe собственное число матрицы А; п - порядок системы дифференциальных
уравнений математической модели;
для комплексно-сопряженных собственных чисел
где
1
R
,
(23)
R - вещественная часть комплексно-сопряженных собственных чисел.
При колебательном переходном процессе частота собственных затухающих колебаний
определяется по формуле:
(24)
C 2f C j ,
где f C частота собственных колебаний;
C - круговая частота собственных колебаний;
j -мнимая часть комплексно-сопряженных собственных чисел.
Время переходного процесса зависит от скорости затухания свободной составляющей
и определяется максимальной постоянной времени цепи:
Tnn 5 max .
(25)
Численный метод интегрирования дифференциальных уравнений
Для интегрирования систем дифференциальных уравнений первого порядка,
представленных в нормальной форме, разработан целый ряд численных методов [!!!!].
Рассмотрим подробнее явный метод Эйлера.
Пусть для системы дифференциальных уравнений первого порядка, записанных в
dX
G (t , X ), с начальными условиями X (0) X 0 требуется
dt
решить задачу Коши во временном интервале 0 t T . Для применения численных
нормальной форме
методов необходимо перейти от непрерывной, или континуальной, формы записи системы
дифференциальных уравнений к дискретной. С этой целью вся область интегрирования
[0,T] разбивается на отрезки
0 t 0 t1 ... t k ... t M T .
Тем самым непрерывной области изменения аргумента t ставятся в соответствие
дискретная область изменения этого аргумента
(0 t T ) (t 0 , t1 ,..., t M ).
k 1, M называют шагом дискретизации (шагом
Величину hk t k t k 1 ,
интегрирования), а саму дискретную область - сеточной областью или сеткой. Будем
далее полагать, что hk h const . Сеточную область при этом называют равномерной, а
t k называют узлами сетки. Значения искомых функций в узлах сеточной области будем
обозначать X (t k ) X k . В k-ом узле сеточной области систему (8) можно записать:
dX k
(26)
Gk ,
dt
dX k dX
где
t t ; Gk G (t k , X k ).
dt
dt
Предположим, что решение задачи Коши известно в узлах, предшествующих t k 1 .
k
При достаточной гладкости вектор-функции G(t,X) (то есть существовании производных
нужного порядка по всем переменным) используем разложение Х(t) в ряд Тейлора в
окрестности точки t k :
X ( n ) (t k )
X (t )
(t t k ) n .
n!
n 0
(27)
Полагая t t k 1 t k h, получим
dX k h d 2 X k h 2 d 3 X k
X k 1 X (t k h) X k h
.
dt
2 dt 2
6 dt 3
(28)
Из (28) находим:
dX k X k 1 X k h d 2 X k h 2 d 3 X k
.
dt
h
2 dt 2
6 dt 3
Подставляя это значение производной в (26), будем иметь
X k 1 X k
Gk 0(h),
h
(29)
h d 2 X k h2 d 3 X k
где 0( h)
2 dt 2
6 dt 3
Аналогичным образом можно вывести и другие формулы численного интегрирования
систем.