«ОБОСНОВАНИЕ И ВЫБОР РАЦИОНАЛЬНЫХ ПАРАМЕТРОВ ДВУХКОНТУРНОГО ВЕРТИКАЛЬНОГО ЛЕНТОЧНОГО КОНВЕЙЕРА ДЛЯ ОБОГАТИТЕЛЬНЫХ
реклама

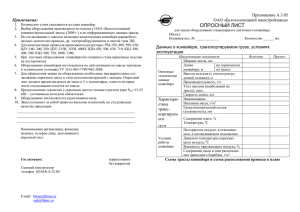
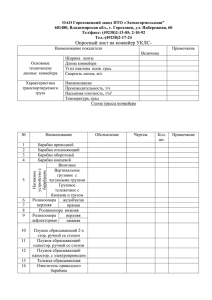
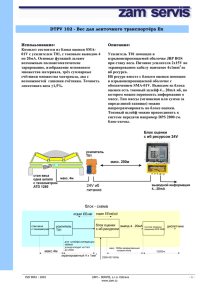
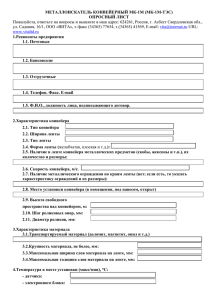
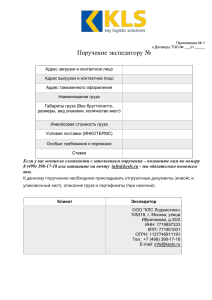
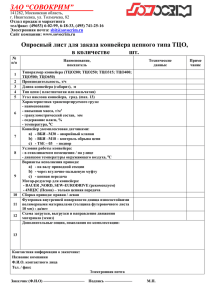
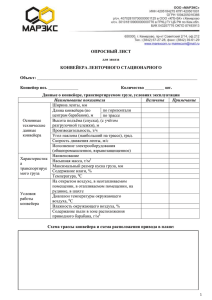
На правах рукописи КОТИЛЕВСКИЙ Александр Владимирович «ОБОСНОВАНИЕ И ВЫБОР РАЦИОНАЛЬНЫХ ПАРАМЕТРОВ ДВУХКОНТУРНОГО ВЕРТИКАЛЬНОГО ЛЕНТОЧНОГО КОНВЕЙЕРА ДЛЯ ОБОГАТИТЕЛЬНЫХ ФАБРИК ГОРНОЙ ПРОМЫШЛЕННОСТИ» Специальность 05.05.06 – Горные машины Автореферат диссертации на соискание ученой степени кандидата технических наук Санкт-Петербург 2010 Работа выполнена в государственном образовательном учреждении высшего профессионального образования СанктПетербургском государственном горном институте имени Г.В. Плеханова (техническом университете). Научный руководитель – доктор технических наук, профессор Тарасов Юрий Дмитриевич Официальные оппоненты – доктор технических наук, профессор Тимофеев Игорь Парфенович, кандидат технических наук Рыжих Алексей Борисович Ведущее предприятие – ОАО «Гипронеруд». Защита диссертации состоится 30 сентября 2010 г в 16 ч 30 мин на заседании диссертационного совета Д 212.224.07 при Санкт-Петербургском государственном горном институте имени Г.В. Плеханова (техническом университете) по адресу: 199106 Санкт-Петербург, 21 линия, д. 2, ауд 7212. С диссертацией можно ознакомиться в библиотеке СанктПетербургского государственного горного института. Автореферат разослан 30 августа 2010 г. УЧЕНЫЙ СЕКРЕТАРЬ диссертационного совета д-р техн. наук, профессор В.В. ГАБОВ ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ Актуальность работы. Использование разрабатываемого двухконтурного вертикального ленточного конвейера на обогатительных фабриках и дробильно-сортировочных заводах горной промышленности позволит существенно улучшить техникоэкономические показатели транспортирования сыпучих грузов, компоновку транспортного и технологического оборудования и уменьшить размеры землеотвода. Однако в настоящее время для выбора параметров разрабатываемого перспективного двухконтурного вертикального ленточного конвейера отсутствуют необходимые для расчета данные, связанные с определением статических сопротивлений движению лент обоих контуров на их вертикальных участках. Эти данные могут быть получены только экспериментальным путем при исследовании бокового давления транспортируемого груза на ленты обоих контуров. Кроме того, для обеспечения экономичной и безопасной эксплуатации конвейера необходима разработка и обоснование параметров улавливающего устройства, срабатывающего при возможном обрыве ленты грузонесущего контура. Данной проблемой занимались такие ученые, как Ю.Д. Тарасов, А.О. Спиваковский, В.К. Дьячков, М.П. Александров, Ю.А. Пертен и др. Цель работы: разработать методику тягового расчета двухконтурного вертикального ленточного конвейера с системой улавливания, обеспечивая эффективную и безопасную его работу. Идея работы: для определения статических сопротивлений движению при транспортировании груза на вертикальном участке конвейера и параметров системы улавливания грузонесущего контура, следует учитывать боковое давление транспортируемого груза, размещенного между полками, на ленты обоих контуров конвейера. Для достижения поставленной цели необходимо решить следующие задачи исследования: 1. Выполнить анализ существующих конструкций вертикальных и крутонаклонных конвейеров, принципов их действия и методик тягового расчета. 2. Разработать лабораторный стенд и методику экспериментальных исследований величины бокового давления 3 транспортируемого груза в зависимости от принятых параметров конвейера. 3. Изготовить экспериментальный стенд и провести его наладку. 4. Провести стендовые исследования и выполнить обработку экспериментальных данных. 5. Разработать уточненную математическую модель вертикального ленточного конвейера. 6. Обосновать компоновочную схему и конструкцию опорных элементов для транспортируемого груза. 7. Разработать методику расчета и выбора параметров улавливающих устройств для обеих ветвей ленты грузонесущего контура. Методы исследований. В основу проведенных исследований положен системный подход к изучаемому объекту. При решении поставленных задач использован комплексный метод исследований, включающий анализ существующих конструкций крутонаклонных конвейеров, анализ существующих конструкций и методик расчета улавливающих устройств, теоретический анализ с использованием методов классической теоретической механики, механики насыпных грузов и экспериментальные исследования на лабораторном стенде. Научная новизна: Установлены зависимости между статическими сопротивлениями движению тягово-несущего и фиксирующего контуров двухконтурного вертикального ленточного конвейера и нагрузками на рабочие органы системы его улавливания с учетом бокового давления транспортируемого груза на ленты обоих контуров и конструктивными параметрами несущих элементов грузонесущего контура при различных физикомеханических свойствах транспортируемого груза. Основные положения, выносимые на защиту: 1. Для определения значения шага расстановки полок на грузонесущем контуре двухконтурного вертикального ленточного конвейера следует руководствоваться рациональным значением бокового давления транспортируемого груза с различными физикомеханическими свойствами, что позволяет определять величины статических сопротивлений движению лент обоих контуров на вертикальном участке конвейера и нагрузки на рабочие органы системы улавливания ветвей грузонесущего контура. Установлено, 4 что для конвейеров с шириной ленты грузонесущего контура свыше 1 м рекомендуется принимать шаг расстановки полок не более 0,6 м. 2. Установлено, что величина бокового давления транспортируемого груза на ленты обоих контуров на вертикальном участке конвейера пропорциональна коэффициентам подвижности, шагу расстановки полок на грузонесущем контуре и коэффициенту пропорциональности между величиной максимального и средне взвешенного бокового давления, а при заданных физикомеханических свойствах транспортируемого груза – экспоненциально зависит от шага расстановки полок на ленте грузонесущего контура. 3. С целью улавливания обеих ветвей ленты грузонесущего контура, в случае его обрыва, следует обеспечивать фиксацию их фрикционными плитами, кинематически связанными двуплечими рычагами с противовесами, а расчетное тормозное усилие определяется с учетом уменьшения его величины за счет бокового давления транспортируемого груза, при этом отношение плеч двуплечих рычагов системы улавливания рекомендуется принимать в пределах 6÷8 при массе противовеса на большем плече до 500 кг. Обоснованность и достоверность научных положений подтверждается лабораторными исследованиями, проводимыми на экспериментальном стенде, и обработкой полученных в ходе исследований данных с использованием математических методов обработки экспериментальных данных. Практическая значимость работы: 1. Предложена принципиальная конструктивная схема двухконтурного вертикального ленточного конвейера для обогатительных фабрик с системой улавливания обеих лент грузонесущего контура. 2. Разработана методика определения бокового давления насыпного груза на ленты обоих контуров. 3. Разработана методика определения коэффициента пропорциональности между величиной максимального и средне взвешенного бокового давления насыпного груза. 4. Разработана методика расчета сопротивлений движению лент обоих контуров. 5. Разработана методика расчета и выбора параметров улавливающих устройств прижимного типа, рекомендации по их 5 установке и выбору рационального их количества для улавливания оборвавшейся ленты грузонесущего контура. Апробация работы. Основные положения и результаты работы докладывались и обсуждались на научной конференции молодых ученых в Санкт-Петербургском государственном горном институте 17.03.2010 г. Личный вклад автора: Разработаны математические модели для определения: сопротивлений движению лент обоих контуров; бокового давления транспортируемого груза на ленты обоих контуров; коэффициента пропорциональности между величиной максимального и средне взвешенного бокового давления насыпного груза на вертикальном участке двухконтурного вертикального ленточного конвейера для транспортирования насыпного груза; рациональных параметров системы улавливания оборвавшейся ленты грузонесущего контура. Разработан и изготовлен экспериментальный стенд для исследования закономерностей формирования статических сопротивлений движению лент обоих контуров на вертикальном участке конвейера. Установлены функциональные связи, определяющие зависимости конструктивных и эксплуатационных параметров конвейера от физико-механических свойств транспортируемого груза. Публикации. По результатам диссертационной работы опубликованы 2 статьи, 1 из которых в издании, рекомендованном ВАК Минобрнауки России, и получен 1 патент РФ. Структура и объем работы. Диссертация состоит из введения, четырех глав и заключения. Работа изложена на 110 страницах, содержит 34 иллюстраций, 14 таблиц, список литературы из 95 наименований. Содержание работы. Во введении обоснована актуальность, цель, задачи работы, сформулирована ее идея, защищаемые научные положения, научная новизна и практическая значимость работы. В первой главе выполнен обзор литературных источников, проведен анализ общих характеристик современных 6 крутонаклонных конвейеров, проведен анализ способов удержания груза на наклонном участке ленточного конвейера, рассмотрены основные проблемы и направления совершенствования, описана новая конструкция вертикального ленточного конвейера с системой улавливания. Во второй главе предложен способ удержания груза при вертикальном транспортировании, обоснована конструктивная схема вертикального ленточного конвейера, уточнена математическая модель процесса транспортирования груза. Предложен способ улавливания оборвавшейся ленты грузонесущего контура вертикального ленточного конвейера, приведена математическая модель процесса улавливания. В третьей главе приведено описание экспериментального стенда и методики проведения исследований, выполнены исследования параметров двухконтурного вертикального ленточного конвейера на вертикальном участке и определены зависимости натяжения лент обоих контуров от величины шага расстановки полок, зависимость бокового давления груза на ленты обоих контуров от величины шага расстановки полок, зависимость коэффициента пропорциональности между величиной максимального и средневзвешенного бокового давления от величины шага расстановки полок, зависимость сопротивления движению лент от величины шага расстановки полок, проведена обработка экспериментальных данных с рекомендациями по выбору рациональных параметров улавливающих устройств, а также рациональному выбору шага расстановки полок. В четвертой главе разработаны рекомендации по проектированию двухконтурных вертикальных ленточных конвейеров, разработан алгоритм и программа для расчета сопротивлений движению, тормозного усилия для улавливания оборвавшейся ленты грузонесущего контура двухконтурного вертикального ленточного конвейера, определению тормозного усилия, развиваемого одним улавливающим устройством, рекомендации по выбору необходимого их количества и расстановке по трассе конвейера для двухконтурных вертикальных ленточных конвейеров. В заключении приведены основные выводы, научные и практические результаты работы. 7 ЗАЩИЩАЕМЫЕ ПОЛОЖЕНИЯ 1. Для определения значения шага расстановки полок на грузонесущем контуре двухконтурного вертикального ленточного конвейера следует руководствоваться рациональным значением бокового давления транспортируемого груза с различными физико-механическими свойствами, что позволяет определять величины статических сопротивлений движению лент обоих контуров на вертикальном участке конвейера и нагрузки на рабочие органы системы улавливания ветвей грузонесущего контура. Установлено, что для конвейеров с шириной ленты грузонесущего контура свыше 1 м рекомендуется принимать шаг расстановки полок не более 0,6 м. Разработана конструкция двухконтурного вертикального ленточного конвейера (рис. 1) и методика расчета и выбора основных его параметров. Использование такого конвейера на обогатительных 8 Рис. 1. Вертикальный ленточный конвейер, а– вид сбоку (продольный разрез), б – узел установки улавливающих устройств для грузонесущей и нерабочей ветвей ленты грузонесущего контура, вид сбоку; в – то же, вид сверху 1 – опорная рама; 2, 3 – барабаны приводные; 4, 5 – барабаны натяжные; 6 – грузонесущий контур; 7 – фиксирующий контур; 8, 9 – рабочая и холостая ветви грузонесущего контура, 10, 11 – рабочая и холостая ветви фиксирующего контура; 12 – полки; 13, 15, 16 – вертикальная направляющая; 14 – прямые роликоопоры; 17, 18 – плиты; 19, 20, 21, 22, 27, 28, 29, 30 – шарниры; 23, 24, 25, 26 – двуплечие рычаги; 31, 32, 33, 34 – кронштейны; 35, 36 – противовесы; 37, 38 – штоки; 39 – электромагниты; 40 – ось симметрии. фабриках и дробильно-сортировочных заводах горных и горнометаллургических предприятий, а также на предприятиях других отраслей промышленности позволит снизить затраты, связанные с землеотводом и строительством транспортных галерей за счет более компактной компоновки объектов технологического комплекса. Проведен комплекс экспериментальных исследований, на специально разработанном лабораторном стенде, для установления закономерностей формирования статических сопротивлений движению лент обоих контуров на вертикальном участке конвейера. Стенд (рис.2) представляет собой фрагмент вертикального участка грузонесущего контура конвейера. При исследовании на стенде для заданной пробы транспортируемого груза, характеризующегося насыпной плотностью (кг/ м3), углом внутреннего трения (град) и коэффициентом подвижности (бокового давления) λ = (1–sin)/ (1+sin ), определяются натяжения P1 и P2 отрезков лент грузонесущего и фиксирующего контуров моделируемого конвейера путем поочередного смещения вверх отрезков лент первого и второго контуров, а также при совместном смещении обоих контуров с определением суммы натяжений P1 + P2. 9 Рис.2. Схема лабораторного стенда. 1 – грузонесущий контур; 2 – полки; 3 – проба сыпучего груза; 4 фиксирующий контур; 5 – основание стенда; 6, 7 – неподвижные направляющие; 8, 9 – кронштейны; 10, 11 – прицепные приспособления; 12 – жесткая опора; 13, 14 винтовые стяжки; 15, 16 – динамометры; 17, 18, 23, 24 – болтовые соединения; 19, 20 – съемные элементы; 21 – ребра жесткости; 22 – нижняя опора. По измеренным значениям натяжений P1 и P2 и экспериментально определенным коэффициентам трения f, f1, f2 (f – пробы транспортируемого груза о ленту второго контура, f1 и f2 – ленты первого и второго контуров о их направляющие) определяются нормальные усилия T1 и T2, приложенные к лентам обоих контуров за счет бокового давления груза, отнесенные к шагу h расстановки полок на ленте первого контура, и усилие T3 , приложенное к ленте первого контура за счет деформации грузонесущей ветви ленты первого контура консольно закрепленной на ней нагруженной полкой. Поскольку усилия T1 и T3 действуют совместно в формировании сопротивлений движения ленты первого контура за счет прижатия этой ленты к направляющей, а также учитывая, что T1 T3 из-за увеличенного натяжения ленты первого контура, их значения целесообразно определять как T0 = T1 + T3 . Усилия T2 и T0 находятся при решении системы уравнений: P1 = nп ( T2 f + T0 f1 ) + G1 + G; P2 = nп T2 ( f + f2 ) + G2; 10 P1 + P2 = nп ( T2 f2 + T0 f1 ) + G1 + G2 + G, где G – суммарный вес пробы транспортируемого груза, размещенной на полках первого контура, Н; G1 , G2– вес ленты первого контура с полками и прицепным приспособлением и вес ленты второго контура с прицепным приспособлением, Н; nп – количество полок, загруженных пробой транспортируемого груза. Из первого уравнения находим: T0 = P1 – (G + G1) – nп T2 f / (nп f1). Из второго уравнения – T2 = ( P2 – G2) nп-1 (f + f2 )-1. Третье уравнение позволяет проконтролировать значение T0, найденное из первого уравнения. По найденным значениям T2 определяются средние значения бокового давления транспортируемого груза на ленту второго контура при различных расстояниях h между полками (Па): p = T2 (b2 h)-1 , (1) где b2 – ширина ленты второго контура, м. С другой стороны, параметр p может быть выражен через физико-механические свойства пробы транспортируемого груза следующим образом: p = g k λ h , (2) где g - ускорение свободного падения, м/с ; k - коэффициент пропорциональности между величиной максимального и средневзвешенного бокового давления при заданном расстоянии h между полками; - насыпная плотность пробы транспортируемого груза кг/м3. Приведенная зависимость получена для условий, когда в качестве транспортируемого груза использован гранитный щебень фракции 20÷40 мм с насыпной плотностью = 1370 кг/м3 и углом внутреннего трения, определяющим коэффициент подвижности (боковое давление) λ (при sin = 0,543). Эта функциональная зависимость может быть аппроксимирована уравнением: 2 p = 363,5∙e1,3∙h. (3) График зависимости (2) функции p(h), полученный в результате экспериментальных исследований на стенде, приведен на рис.3. 11 Рис.3. Зависимость среднего бокового давления транспортируемого груза на ленту второго контура от шага h расстановки полок на ленте первого контура Аналогичным образом определяется зависимость условного давления p0, определяющимся усилием T0 прижатия ленты первого контура к направляющей от параметра h: p0 = T0 (b1 h)-1 , где b1 ширина ленты первого контура, м. Функция p0 (h) описывается уравнением: p0 = 46,5∙e13,1∙h. (4) График зависимости p0 (h) представлен на рис.4. Полученные функциональные связи, определяющие зависимости конструктивных и эксплуатационных параметров конвейера от физико-механических свойств транспортируемого груза, позволяют оценить величину сопротивлений движению первого грузонесущего и второго фиксирующего контуров вертикального ленточного конвейера, вызванные боковым давлением транспортируемого груза на ленты обоих контуров и деформацией ленты первого контура. С учетом полученных зависимостей при проектировании вертикального ленточного конвейера статические сопротивления грузонесущей ветви первого контура на вертикальном его участке следует определять по формуле: W1 = H g( q + qл1 + qп ) + (p0 B1 + qр )w1 , 12 Рис.4. Зависимость условного среднего бокового давления на ленту первого контура от шага расстановки полок на ленте а статические сопротивления второго контура определяются по формуле: W2 = H ( g qл2 + p B2 w2 ). Принятые обозначения: B1, B2 – ширина ленты соответственно первого и второго контуров; qл1, qл2 , - линейные массы лент первого и второго контуров, кг/м; w1, w2 - коэффициенты сопротивления движению лент по роликовым опорам для первого контура и опорам скольжения – для второго контура. Рис. 5. График зависимостей сопротивлений движению от шага расстановки полок. Анализируя графики, приходим к выводу, что изменение сопротивлений движению грузонесущей ветви наиболее точно аппроксимируется полиномиальной зависимостью – 7 5 7 4 7 3 6 2 4 4 , а для W 3 10 h 3 10 h 2 10 h 4 10 h 5 10 h 7 10 1 сопротивлений движению огибающей ветви, наиболее достоверной является аппроксимация экспоненциальной зависимостью: 4 0, 2h . W 8 10 e 2 Используя полученные зависимости (среднего бокового давления на ленту второго контура, условного среднего бокового давления на 13 ленту первого контура, сопротивлений движению лент обоих контуров от величины шага расстановки полок), представленные на графиках (рис. 5), можно сделать вывод, что для двухконтурного вертикального ленточного конвейера с ширинами лент не менее 1 м рекомендуется принимать шаг расстановки полок не более 0,6 м. При заданных конструктивных параметрах рациональное значение шага расстановки полок – 0,4 м. 2. Установлено, что величина бокового давления транспортируемого груза на ленты обоих контуров на вертикальном участке конвейера пропорциональна коэффициентам подвижности, шагу расстановки полок на грузонесущем контуре и коэффициенту пропорциональности между величиной максимального и средне взвешенного бокового давления, а при заданных физико-механических свойствах транспортируемого груза – экспоненциально зависит от шага расстановки полок на ленте грузонесущего контура. Исследования по определению нормальных и касательных напряжений проводились по следующей схеме: Рис. 6. 1 – предметный стол; 2 – проба насыпного груза; 3 – ограничивающая рамка; 4 – сменный груз; 5 – тяговый орган. σ = G/F; τ =T/F, где σ и τ – нормальное и касательное напряжение сдвига сыпучего груза соответственно, Па; T – усилие сдвига ограничивающей рамки, Н; G – суммарная нормальная нагрузка от веса самого груза и сменного груза, свободно размещеннго на поверхности пробы транспортируемого груза внутри ограничивающей рамки, Н; F – площадь ограничивающей рамки, м2. В результате, для пробы транспортируемого груза, получаем зависимость соотношения нормальных и касательных напряжений сдвига, которая аппроксимируется уравнением σ= 0,646τ + 327,2. Угол внутреннего трения (φ) равен 33º (sin φ=327,2/603,35=0,542). Коэффициент подвижности равен: λ=(1-sin φ)/(1+sin φ) = 0,296. 14 Рис. 7. Соотношение нормальных и касательных напряжений сдвига Из уравнения (2), в которое значения p подставляются из уравнения (1), могут быть определены значения коэффициента k, соответствующие различным значениям h: k= p (g λ h )-1. (5) Рис.8. Зависимость коэффициента пропорциональности от шага расстановки полок на ленте первого контура Приведенная зависимость получена для условий транспортирования гранитного щебня фракции 20÷40 мм с насыпной плотностью () 1370 кг/м3 и углом внутреннего трения () 33°, определяющим коэффициент подвижности (боковое давление) λ, и наилучшим образом аппроксимируется уравнением: k = e-2,7∙h. 3. С целью улавливания обеих ветвей ленты грузонесущего контура, в случае его обрыва, следует обеспечивать фиксацию их фрикционными плитами, кинематически связанными двуплечими рычагами с противовесами, а расчетное тормозное усилие определяется с учетом уменьшения его величины за счет бокового давления транспортируемого груза, при этом отношение плеч двуплечих рычагов системы улавливания 15 рекомендуется принимать в пределах 6÷8 при массе противовеса на большем плече до 500 кг. Для определения рациональных параметров улавливающих устройств задаемся исходными данными (табл. 1): Таблица 1 Исходные данные для определения рациональных параметров улавливающих устройств Н, м 20 q, кг/м 271,69 qл, кг/м 16,6 qр, кг/м 15 В1, м 1 В2, м 1,2 w 0,04 f 0,62 t0, с 0,5 lт, м 1 Параметры улавливающих устройств выбираются следующим образом. Вначале определяется скорость движения ленты после ее обрыва на момент срабатывания соответствующего улавливающего устройства в результате решения дифференциального уравнения m dv/dt +W = 0, (6) где m - движущаяся масса, кг; v и dv – скорость движения ленты (при движении вниз) после ее обрыва и ее приращение, м/с; t и dt – время движения после обрыва ленты вниз и его приращение, с; W – суммарные сопротивления движению ленты, Н. Перечисленные выше параметры определяются при следующих допущениях: скорость ленты в момент ее обрыва, учитывая движение ленты вверх строго в вертикальном направлении, принимается равной нулю, влияние верхнего и нижнего наклонных участков грузонесущего контура не учитывается, т.к. при достаточно большой высоте вертикального участка конвейера, как показали расчеты, они не оказывают существенного влияния на значения параметров m и W и конечный результат. С учетом принятых допущений для грузонесущей ветви улавливаемого контура: m = H (q + qл + qп); W = H - g (q + qл + + qп)+ p (B2 f + B1 w) + qр w. Соответственно для холостой ветви улавливаемого контура: m=H (qл+qп); W=-g H (qл+qп). Принятые обозначения: H – высота вертикального участка конвейера, м; q , qл , qп - линейные массы соответственно транспортируемого груза, ленты и закрепленных на ленте несущих полок, кг/м; g – ускорение свободного падения, м/с2 ; p – средневзвешенное боковое давление транспортируемого груза на ленту второго и первого контуров при заданном расстоянии между 16 полками первого контура, Па. Параметр p определяется в результате экспериментальных исследований (см ниже) физико-механических свойств сыпучего груза, транспортируемого конвейером; B1, B2 – ширина ленты первого (грузонесущего) и второго (фиксирующего) контуров, м; f коэффициент трения транспортируемого груза о ленту второго контура, w - коэффициент сопротивления движению ленты первого контура относительно роликовых опор; qр – линейная масса вращающихся частей роликовых опор, кг/м. Начальная скорость движения ленты вниз v0 в момент срабатывания улавливающего устройства (м/с) находится из дифференциального уравнения (7): v0 t0 0 0 dv W/ m dt (7) После интегрирования уравнения (7) находим: v 0 W t 0 / m , где – t0 – время срабатывания улавливающего устройства, с. При расчетах параметр t0 определяется в соответствии с принятой схемой включения расстопоривающего электромагнита. Процесс улавливания ветвей оборвавшейся ленты первого контура описывается дифференциальным уравнением: m dv/dt +W + Wт = 0, (8) где Wт - суммарная тормозная сила, развиваемая улавливающим устройством, Н. Необходимая величина тормозного усилия Wт находится при интегрировании уравнения (8) с учетом найденного значения v0 и заданной величины тормозного пути lт при улавливании ленты. Для этого приращение временной координаты t выражается через приращение линейной координаты x и скорость v при смещении оборвавшейся ленты вниз, т.е dt = dx /v : m v dv/dx +W + Wт = 0, Уравнение (9) интегрируется «по частям»: 17 (9) 0 lT v0 0 vdv ( W WT )/ m dx, откуда Wт = 0,5 m v 02 / lт - W. В зависимости от высоты H вертикальной части конвейера он может быть снабжен одним или несколькими улавливающими устройствами, поэтому в общем случае Wт = nл Wто , (10) где nл - число улавливающих устройств, Wто - тормозное усилие, развиваемое одним улавливающим устройством, Н. Выбор параметров улавливающих устройств, обеспечивающих надежное улавливание обеих ветвей грузонесущего контура, осуществляется при решении уравнения (табл. 2): Wт = 0,5 nл f0 Gп l2 / l1 sin 2, (11) где f0 – для грузонесущей ветви ленты первого контура приведенный коэффициент трения торцов полок и транспортируемого груза о поверхность ленты второго контура. Для нерабочей ветви – ее коэффициент трения о направляющую; Gп - вес противовеса на двуплечем рычаге, Н; l1 , l2 – плечи рычага улавливающего устройства соответственно со стороны тормозной плиты и противовеса, м; - угол наклона двуплечего рычага к горизонту в исходном положении перед срабатыванием улавливающего устройства, град. Определение суммарной тормозной силы h (шаг), м 0,3 0,4 0,5 0,6 qп, кг/м 10,78 9,33 8,35 7,62 p, Па 536,88 611,42 696,30 792,97 m, кг 5981,31 5952,43 5932,73 5918,19 W, Н -50186 -48735 -47211 -45553 v0, м/с 4,20 4,09 3,98 3,85 Таблица 2 Wт, Н 102823,06 98611,16 94171,86 89380,01 Уравнение (11) позволяет подобрать требуемое соотношение веса противовеса и числа улавливающих устройств, обеспечивающих потребную величину тормозной силы Wт для улавливающих устройств на грузонесущей и нерабочей ветви первого контура (табл.3): 18 nл Gп = 2 Wт l1 (f0 l2 sin 2 )-1 . l1, м 0,15 0,15 0,15 0,15 Таблица 3 Соотношение веса противовеса и числа улавливающих устройств h=0,3 м h=0,4 м h=0,5 м h=0,6 м l2, м l2/l1 β, град nл*Gп, Н nл*Gп, Н nл*Gп, Н nл*Gп, Н 0,6 4 45 82921,82 79525,13 75945,05 72080,65 0,8 5,33 45 62191,37 59643,85 56958,79 54060,49 1 6,67 45 49753,09 47715,08 45567,03 43248,39 1,2 8 45 41460,91 39762,57 37972,53 36040,33 При заданных конструктивных параметрах вертикального конвейера, рациональным вариантом будет расстановка полок с шагом 0,6 м при отношении плеч рычагов 8 и установка восьми улавливающих устройств с противовесами массой 500 кг каждый (табл. 4). Таблица 4 Выбор рационального количества улавливающих устройств nл 2 4 6 8 10 Gп, Н 5000 5000 5000 5000 5000 nл*Gп, Н 10000 20000 30000 40000 50000 При нормальной работе конвейера статическое сопротивление движению грузонесущей ветви ленты первого контура на вертикальном участке конвейера помимо веса ленты с полками и размещенного на полках транспортируемого груза зависит от бокового давления груза на ленту грузонесущего контура и ее деформации за счет нагрузок от прикрепленных к ленте полок с транспортируемым грузом. Сопротивление формируется при взаимодействии грузонесущей ветви с роликовыми опорами. Сопротивления движению восходящей ветви второго контура помимо веса ленты определяется боковым давлением транспортируемого груза, которое воспринимается восходящей ветвью ленты второго контура с передачей этого давления на неподвижную направляющую, в результате чего возникает дополнительная сила трения. ЗАКЛЮЧЕНИЕ 19 В диссертации, на базе выполненных теоретических и экспериментальных исследований была решена актуальная научноквалификационная задача установления закономерностей, связывающих величину шага расстановки полок на грузонесущем контуре двухконтурного вертикального ленточного конвейера с величиной бокового давления транспортируемого груза с различными физико-механическими свойствами, что позволяет определить величины статических сопротивлений движению лент обоих контуров на вертикальном участке конвейера и нагрузки на рабочее органы системы улавливания ветвей грузонесущего контура, а также определена зависимость бокового давления от коэффициента пропорциональности между величиной максимального и средневзвешенного бокового давления и предложен вариант улавливания обоих контуров за счет фиксации их фрикционными плитами. Основные научные результаты и практические рекомендации заключаются в следующем: 1. Предложена, защищенная патентом, конструкция вертикального двухконтурного ленточного конвейера с улавливающим устройством прижимного типа, которая с учетом полученных в результате экспериментальных исследований параметров – величин суммарных сопротивлений движению может быть рекомендована не только для двухконтурного вертикального ленточного конвейера с данным видом закрепления несущих полок, но и других конструкций вертикальных ленточных конвейеров. 2. Предложена математическая модель, описывающая процесс формирования статических сопротивлений движению лент обоих контуров двухконтурного ленточного конвейера на вертикальном участке с учетом бокового давления транспортируемого груза. 3. Установлена закономерность формирования бокового давления транспортируемого груза на ленты обоих контуров, которая аппроксимируется экспоненциальными функциями, с параметрами, определяющими физико-механические свойства транспортируемого груза, ширину ленты и шаг расстановки полок на ленте грузонесущего контура, который рекомендуется принимать не больше 0,6 м. 4. Предложена математическая модель процесса улавливания оборвавшейся ленты грузонесущего контура двухконтурного 20 вертикального ленточного конвейера, связывающая конструктивные параметры системы улавливания с параметрами конвейера и боковым давлением транспортируемого груза. 5. Разработан и изготовлен экспериментальный стенд для определения статических сопротивлений движению лент обоих контуров на вертикальном участке конвейера. 6. Разработана и апробирована методика проведения экспериментальных исследований для установления закономерностей формирования статических сопротивлений движению лент обоих контуров на вертикальном участке конвейера с учетом бокового давления транспортируемого груза. 7. Разработана методика расчета и выбора параметров улавливающего устройства для вертикального двухконтурного ленточного конвейера, позволяющая подобрать рациональное соотношение массы противовеса и числа улавливающих устройств на вертикальном участке конвейера. 8. На основе методики расчета и выбора параметров улавливающего устройства разработана программа, позволяющая подобрать рациональное соотношение массы противовеса и числа улавливающих устройств средствами программного обеспечения Microsoft Excel. Основные положения диссертации опубликованы в следующих работах: 1. Тарасов Ю.Д. Исследование параметров вертикального ленточного конвейера с системой улавливания грузонесущего контур / А.В. Котилевский // Горное оборудование и электромеханика. №7. 2010. С. 30 – 36. 2. Вертикальный ленточный конвейер. Пат. РФ №2352510 МПК B 65 G 15/00 (2007.12), / Ю.Д. Тарасов, А.В. Котилевский, патентообладатель Санкт-Петербургский государственный горный институт, опубликовано: 20.04.2009 Бюл. № 11. 3. Котилевский А.В. Двухленточные крутонаклонные конвейеры // Журнал научных публикаций аспирантов и докторантов. №10. 2009 – С. 117-121. 21