ЭЛЕКТРОПРИВОД ГИРОСКОПОВ
реклама

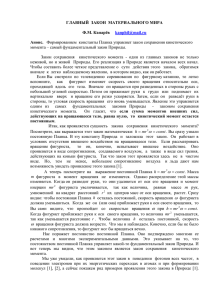
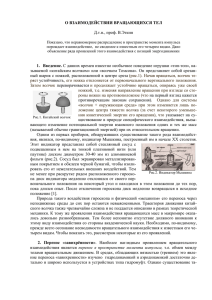
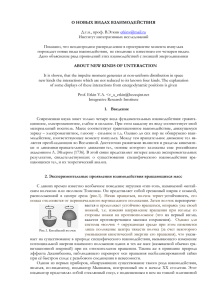
9. Электропривод гироскопов В данном разделе рассматривается роторный механический гироскоп (далее – просто гироскоп). 9.1. Определения Гироскоп - маховик, вращающийся с большой скоростью вокруг своей оси и закрепленный так, что ось его вращения может поворачиваться [3]. Для обеспечения поворота оси маховика чаще всего используют карданов подвес (рис.1) [1]. Как видим, ось вращения гироскопа (ось ротора) способна изменять ориентацию в пространстве [2]. Рис.1. Схема простейшего карданном подвесе [2]. гироскопа в При использовании одной рамы - ротор гироскопа имеет две степени свободы (оси возможного вращения); при двух рамах (рис.1 и 2) - три [3]. Маховик может приводиться во вращение различными типами приводов – пневматическим, пружинным, пороховым. Преимущественное распространение в гироскопии получил электропривод [1]. Гиродвигатель - маховик вместе с электродвигателем, приводящим его во вращение [1]. 9.2. Свойства гироскопов 1) Если на гироскоп не действуют внешние возмущения, то ось вращения его ротора сохраняет постоянное положение в пространстве [3]. 2) Если на гироскоп действует момент внешней силы, стремящийся повернуть (сдвинуть) ось его вращения, то эта ось начинает вращаться не вокруг направления вектора момента (т.е. не вдоль действия вектора силы), а вокруг оси, перпендикулярной вектору момента [3]. Это движение называется прецессией [1]. Прецессия – это изменение вектора кинетического момента гироскопа в результате действия на него внешних сил [4]. Рис.2. Прецессия механического гироскопа [3] Это свойство можно наблюдать в игрушке "волчок". После его раскрутки, повалить его на бок (толкнув его ось вращения) не получится. Под действием толчка волчок лишь отскочит в сторону и будет продолжать вращаться вокруг вертикальной оси, положение которой будет лишь немного смещено относительно первоначального направления оси вращения. Рис.3 Иллюстрация вращения волчка На рис.2 проиллюстрировано свойство (2). Пусть ротор гироскопа вращается с угловой скоростью ωψ. Iψ – исходное положение оси вращения ротора гироскопа. Вдоль нее направлен вектор кинетического момента гироскопа (жирная стрелка). Кинетический момент ротора гироскопа (момент количества движения) - произведение угловой скорости ωψ на момент инерции J ротора гироскопа (относительно его оси вращения). Кинетический момент – векторная величина, направление вектора - вдоль оси вращения в соответствии с "правилом буравчика" [3]. Рука, воздействующая на наружную раму перпендикулярно оси вращения ротора (рис. 2), моделирует приложение внешней силы. Согласно законам Ньютона, такой момент силы должен создавать кинетический момент, совпадающий с ним по направлению и пропорциональный его величине. Поскольку же кинетический момент (связанный с собственным вращением ротора) фиксирован по величине (заданием постоянной угловой скорости посредством электродвигателя), это требование законов Ньютона может быть выполнено только за счет поворота оси вращения (в сторону вектора внешнего момента силы), приводящего к увеличению проекции кинетического момента на эту ось. Этот поворот и есть прецессия, о которой говорилось ранее. Скорость прецессии возрастает с увеличением внешнего момента силы и убывает с увеличением кинетического момента ротора [3]. ωθ – угловая скорость поворота наружной рамки подвеса (нутация); Mθ – момент возмущающей внешней силы. I0 – опорное направление кинетического момента; ф – угол отклонения внутренней рамки карданова подвеса; ωф – угловая скорость поворота внутренней рамки подвеса (прецессия) [3]. Таким образом, гироскоп сохраняет положение оси вращения маховика в абсолютном (инерциальном) пространстве неизменным. Поэтому он может указывать угол поворота основания, на котором закреплен [3]. На этом основано широкое использование гироскопов в технике (в гироскопических приборах) [1]. 9.3. Особые требования, предъявляемые к гиродвигателям Точность и чувствительность любого гироскопического прибора тем выше, чем больше кинетический момент ротора Jω и выше его стабильность [5]. Отсюда вытекают первые три требования. 1) Обеспечение высокой частоты вращения маховика ω. Скорость вращения гироскопа значительно превышает скорость поворота оси его вращения [2]. 2) Гиродвигатель должен иметь большой момент инерции J при минимальной массе [5]. 3) Высокая стабильность скорости вращения при изменении момента нагрузки и колебаниях напряжений сети [5]. 4) Минимальное трение [1]. 5) Быстрая готовность [1]. Под готовностью понимают время с момента включения до момента стабилизации выходных параметров с заданной точностью. Одной из составляющих этого времени является время разгона гиродвигателя (установления модуля кинетического момента) [1]. Время разгона и стабилизации уровня и направления вектора кинетического момента называют кинематической готовностью [1]. 9.4. Особенности электродвигателей для гироскопов 1) Электродвигатель конструктивно объединен в одно целое с маховиком, который является носителем кинетического момента. Маховик содержит вынесенный на максимальный радиус обод, ступицу, посредством которой осуществляется посадка маховика на вал и жестко связывающую их диафрагму. Совокупность названных элементов, образующих маховик, ротор электродвигателя и вал будем называть гироротором. Гироротор является быстровращающимся элементом ГД, поэтому основные требования к его конструкции заключаются в обеспечении механической прочности, стабильности, однородности, монолитности и симметрии [1]. 2) Для обеспечения при данных габаритах и весе наибольшего кинетического момента маховая масса ГД размещается на максимальном расстоянии от оси вращения. ЭД расположен внутри объема маховой массы. В этих условиях конструктивно более целесообразна обращенная конструкция ЭД – с вращающимся наружным ротором, которая и получила преимущественное распространение [1]. При переходе к обращенной конструкции масса двигателя увеличивается незначительно [5]. 3) Для увеличения кинетического момента двигатели выполняются высокоскоростными. Их скорость чаще всего составляет 20...30 тысяч об/мин [1]. Высокая частота вращения двигателей переменного тока обеспечивается за счет высокой частоты питающего напряжения, которая должна быть увеличена до 400–2000 Гц при двух- и четырехполюсном исполнении гиродвигателя [5]. 4) На валу гиродвигателей нет полезной нагрузки (Мв=0). Они работают в режиме холостого хода (КПД равен нулю). Развиваемый гиродвигателями электромагнитный момент расходуется на покрытие собственных потерь - механических потерь трения вращающегося маховика о среду, а также потери на трение в подшипниках [1]. Вся мощность, потребляемая ГД, идет на его нагрев [1]. Минимальное трение обеспечивается высокосовершенными подшипниками [3]. Поскольку трение в подшипниках очень мало, для приведения ротора гироскопа во вращение и для поддержания этого вращения обычно бывает достаточно маломощного электродвигателя [3]. 5) Из-за большого момента инерции вращающихся частей ГД имеют относительно большое время разбега (разгона от состояния покоя до установившейся скорости). Так, если время разбега исполнительных двигателей при частоте питания 400...500 Гц составляет 0,05...0,15 с, то для ГД оно в десятки и сотни раз больше и обычно составляет от 3 до 100 секунд [1]. Время разбега гиродвигателя можно снизить за счет применения вакуума, водорода или гелия, при герметичном выполнении камеры гироскопа, что позволяет снизить потери на трение ротора в окружающей среде. Уменьшение времени разбега может быть также достигнуто повышением напряжения питающей сети на время пуска [5]. 6) В гироскопических приборах диаметр ротора составляет 4–20 см (меньшее значение относится к авиационно-космическим приборам). Диаметры роторов судовых гиростабилизаторов измеряются метрами [3]. 9.5. Типы электродвигателей для гироскопов. 1) Двигатели постоянного тока. Применялись изначально [1]. ДПТ с параллельным и независимым возбуждением имеют достаточно жесткую характеристику, т.е. их скорость вращения с изменением момента нагрузки изменяется незначительно [5]. Недостатки [1]: - общие недостатки, присущие коллекторной машине постоянного тока; В частности, вследствие износа щеток и коллектора и наличия вращающейся обмотки якоря возрастает возможность разбалансировки и загрязнения прибора. Практически трудно обеспечить удовлетворительную коммутацию при вакуумированном выполнении гиродвигателя [1]. - невысокая скорость вращения (обычно не превышает 12000–14000 об/мин) и невысокая стабильность этой скорости. Как следствие, невысокий кинетический момент [5]. 2) Вентильный двигатель [1]. За счет наибольшего отношения момента к току эти двигатели обладают лучшими характеристиками по быстродействию и меньшими габаритами. Проблема их использования связана с реализацией бесконтактного датчика положения, обеспечением стабильности скорости вращения. 3) Асинхронный двигатель с короткозамкнутым ротором [1]. Удовлетворяет большинству требований, и получил широкое применение в гироскопии. С целью увеличения момента инерции применяют обращенную конструкцию АД, когда статор 1 находится внутри ротора [5] (рис. 4). В маховик 3 запрессован сердечник ротора с короткозамкнутой обмоткой 5. Недостаток [1]: - зависимость скорости вращения не только от изменения параметров, источника питания, но и от изменения момента нагрузки. Поэтому высокие требования к стабильности кинетического момента не могут быть обычно удовлетворены с помощью асинхронных Рис. 4. Эскиз конструкции АД гиродвигателей. обращенного исполнения [5] 4) Гистерезисный двигатель [1]. Нашел преимущественное применение [1]. Достоинства [1]: - механическая характеристика обеспечивает надежный пуск и вход в синхронизм любой инерционной массе, если статический момент нагрузки меньше электромагнитного - простота и монолитность конструкции ротора. - обеспечение стабильной скорости вращения на уровне стабильности частоты питания (не более 0,01...0,001%). 9.6. Структура электропривода для гироскопов 1) Электродвигатель 2) Статический преобразователь (инвертор) с каналами регулирования (стабилизации) частоты и напряжения [1]. Обеспечивает высокую частоту напряжения, ее стабильность и минимальное время разгона за счет частотного управления с частотой абсолютного скольжения близкой к критической, то есть при стабилизации в режиме пуска частоты абсолютного скольжения [1]. 9.7. Область применения гироскопов Гироскоп способен измерять изменение углов ориентации связанного с ним тела относительно инерциальной системы координат. Как правило, принцип действия основан на законе сохранения вращательного момента (момента импульса) [2]. Основные области применения гироскопов – судоходство, авиация и космонавтика [3]. 1) Системы навигации (авиагоризонт, гирокомпас, ИНС и т. п.) [2]. Пример. Если поворот оси гироскопа ограничить пружиной, то на ЛА, выполняющем разворот, гироскоп будет деформировать пружину, пока не уравновесится момент внешней силы. В этом случае сила сжатия (или растяжения) пружины пропорциональна угловой скорости движения летательного аппарата. Таков принцип действия авиационного указателя поворота и многих других гироскопических приборов [3]. Прецизионные гироскопы используются в системах наведения стратегических ракет большой дальности [2]. Альтернативное решение: Спутниковая навигация GPS и ГЛОНАСС [2]. 2) Нереактивные системы ориентации и стабилизации космических аппаратов [2]. Например, если каким-либо способом измерять угловое положение рамок относительно друг друга и корпуса, то при различных поворотах объекта (а значит и корпуса гироскопа) можно получить данные о его угловом положении относительно неподвижной в пространстве оси ротора. [1]. К приборам систем стабилизации и навигации относятся авиагоризонт, гировертикаль, гироскопический указатель крена и поворота. Гироскопы могут быть как указывающими приборами, так и датчиками автопилота. На многих самолетах предусматриваются гиростабилизированные магнитные компасы и другое оборудование – навигационные визиры, фотоаппараты с гироскопом, гиросекстанты. В военной авиации гироскопы применяются также в прицелах воздушной стрельбы и бомбометания [3]. Указатель курса, поворота, горизонта, сторон света, гирокомпас [4] Внутри этих приборов вращаются со скоростью в несколько десятков тысяч оборотов в минуту небольшие роторы-волчки, укрепленные в кардановом подвесе. Корпус прибора можно поворачивать как угодно, при этом ось вращающегося гироскопа будет сохранять неизменное положение в пространстве [4]. Гироскопические приборы для автоматического управления движением самолетов и кораблей. Для поддержания заданного курса корабля служит "авторулевой", а самолета – "автопилот" [4]. "Автопилот" снабжен двумя гироскопами. У одного из них ось располагают вертикально и в таком положении раскручивают гироскоп. Вертикально расположенная ось гироскопа задает горизонтальную плоскость. Ось второго гироскопа располагают горизонтально, ориентируя ее вдоль оси самолета. Этот гироскоп постоянно "знает" курс самолета. Оба гироскопа дают соответствующие команды механизмам управления, поддерживающим полет самолета по заданному курсу [4]. Применения вне ЛА. 3) Микромеханические гироскопы используются для систем стабилизации движения автомобилей или видеокамер, в мобильных телефонах [2]. 9.8. Исторический экскурс [2] 1550. Джероламо Кардано (1501 — 1576) в книге "De subtilitate rerum" ("Хитроумное устройство вещей") описал устройство, получившее позже название "карданов подвес". Карданов подвес был впервые изобретён греческим инженером Филоном Византийским в III в. до н.э. 1765. Эйлер впервые опубликовал теорию движения твердого тела около неподвижной точки его опоры и тем самым создал теоретическую базу для дальнейшего более глубокого изучения законов движения волчка. Работы французских ученых Ж.Лагранжа (1736-1813) и Л.Пуансо (?) (1777 - 1859) во многом содействовали дальнейшему изучению и разработке методов практического использования свойств быстро вращающегося волчка. 1813. Французский математик Пуассон упоминает Иоганна Боненбергера как изобретателя гироскопа 1817. Иоганн Боненбергер опубликовал описание своего изобретения - гироскопа. Главной частью гироскопа Боненбергера был вращающийся массивный шар в кардановом подвесе. 1832. Американец Уолтер Р. Джонсон придумал гироскоп с вращающимся диском. 1852. Французский учёный Жан Бернар Леон Фуко (1819–1868) усовершенствовал гироскоп и впервые использовал его для экспериментальной демонстрации вращения Земли. Именно благодаря этой демонстрации гироскоп и получил своё название от греческих слов "вращение" ("гиро") "наблюдаю" ("скоп"). Фуко, как и Боненбергер, использовал карданов подвес. 27.09.1852. Фуко демонстрирует действие своего прибора членам Парижской академии наук Вторая половина XIX века. Предложено использовать электродвигатель для разгона и поддержания движения гироскопа. 1880-е. Инженером Обри гироскоп был впервые применён на практике - для стабилизации курса торпеды. 1886. Французский адмирал Флерие предложил новый прибор - секстан - для измерения географической широты местоположения корабля во время шторма, основой которого являлся быстро вращающийся гироскоп. XX век. Гироскопы стали использоваться в самолётах, ракетах и подводных лодках вместо компаса или совместно с ним. Список использованных источников 1. Проект Тарасова 2. wiki (Гироскоп) 3. http://www.krugosvet.ru/enc/nauka_i_tehnika/tehnologiya_i_promyshlennost/GIROSKOP.html 4. http://revolution.allbest.ru/physics/00010989_0.html 5. В.Д. Бердоносов. Развитие электропривода (проявление законов развития технических систем в электроприводе). http://www.metodolog.ru/01204/01204.html