Лабораторная работа №5 ИССЛЕДОВАНИЕ ПИД 1. Цель работы
реклама

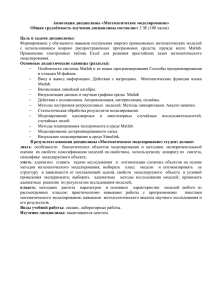
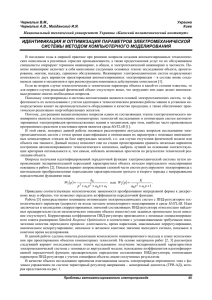
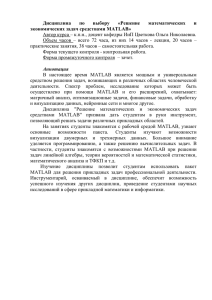
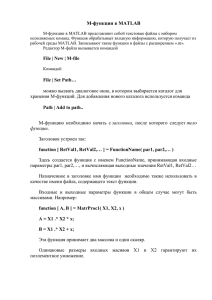
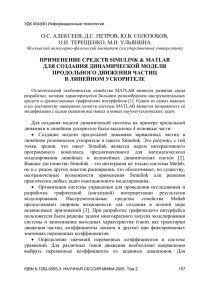
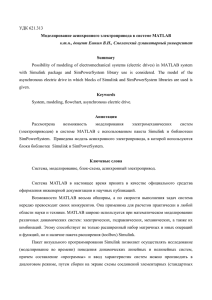
Лабораторная работа №5 ИССЛЕДОВАНИЕ ПИД-РЕГУЛЯТОРОВ 1. Цель работы Целью работы является исследование ПИД-регуляторов и оптимизация их параметров с использованием автоматизированных средств моделирования на ПК – MATLAB,SIMULINK. 2. Задачи работы – Закрепление, углубление и расширение знаний студентов при исследование ПИД-регуляторов. – Овладения навыком синтеза ПИД-регуляторов. – Приобретение умений и навыков работы с программой математического моделирования MATLAB. 3. Теоретическая часть Классическая схема управления с единичной отрицательной обратной связью показана на рисунке 1. g(t) ε (t) + u(t) Регулятор Объект управления y(t) - Рис. 1. Схема с отрицательной обратной связью Назначение регулятора системы заключается в коррекции динамических свойств объекта управления с помощью управляющего сигнала u(t ) так, чтобы реальной выходной сигнал y (t ) как можно меньше отличался от желаемого выходного сигнала g (t ) . Регулятор вырабатывает управление, используя ошибку регулирования (t ) g (t ) y(t ) . Для оценки динамических свойств системы часто рассматривается реакция на единичное ступенчатое воздействие. Переходной процесс должен отвечать заданным показателям качества, к которым 1 относятся время переходного процесса, перерегулирование и колебательность. ПИД-регуляторы (ПИД – пропорционально – интегродифференциальный) получили широкое распространение при управлении производственными и технологическими процессами. Основное уравнение ПИД-регулятора имеет следующий вид: t u(t ) k p (t ) ki ( )d kd 0 d (t ) , dt (1) где k p , ki , kd – константы, выбираемые в процессе проектирования. С их помощью удается обеспечить соизмеримость отдельных слагаемых формулы (1). Дифференциальная составляющая в формуле (1) позволяет повысить быстродействие регулятора, предсказывая будущее поведение процесса. Интегральная составляющая в формуле (1) призвана ликвидировать статические ошибки управления, поскольку интеграл даже от малой ошибки может быть значительной величиной, вызывающей реакцию регулятора. Хотя ПИД–регулятор представляет собой системы второго порядка, его можно успешно применять для управления процессами, имеющими более высокий порядок. Это вызвано возможностью аппроксимации многих систем высокого порядка системами второго порядка. На практике часто используются упрощенные версии ПИДрегулятора – П-, И-, ПД- и ПИ-регуляторы, описываемые формулами: u(t ) k p (t ), (2) t u(t ) ki ( )d , 0 u ( t ) k p ( t ) k d d (t ) , dt (3) (4) t u(t ) k p (t ) ki ( )d . 0 2 (5) При большом значении коэффициентов усиления П- и Ирегуляторы ведут себя как двухпозиционное реле. Существует инженерный подход к синтезу ПИД-регуляторов – методика Зиглера-Николса, которая предлагает следующие шаги: 1. Коэффициенты k i и k d устанавливаются равными нулю, а коэффициент k p увеличивается до тех пор, пока система не потеряет устойчивость. 2. Предельное значение k p обозначается как ku , а период автоколебаний как pu . 3. Значения коэффициентов ПИД-регулятора рассчитываются по следующим формулам: k p 0,6ku ; ki 1,2(ku pu ); kd 3ku pu 40. В аналоговых промышленных ПИД-регуляторах коэффициенты настраиваются вручную. 4. Краткое описание MATLAB Лабораторная работа выполняется в программе математического моделирования MATLAB. Программа MATLAB включает в себя пакет прикладных программ для решения технических задач и одноименный язык программирования, используемый в этом пакете. Основными компонентами системы являются базовая система MATLAB и пакет моделирования систем Simulink. Остальные пакеты расширения разбиты на 4 категории – расширения Extension MATLAB и Extension Simulink, а также комплексы пакетов расширения Blockset и Toolbox. Раздел MATLAB Extension содержит средства для подготовки исполняемых приложений MATLAB (с подключаемыми библиотеками и без них). Раздел Toolbox (инструментальные средства) содержит самое большое число пакетов расширений системы MATLAB, такие как «Control system», «Database», «Fuzzy logic», «Wavelet» и т.д. В разделе Blockset расположено несколько пакетов, относящихся к главному пакету расширения системы MATLAB-Simulink, такие как «DSP», «Fixed-Point», «Nonlinear control design» и «Power systems». 3 В разделе Extension Simulink имеется ряд средств, предназначенных для моделирования в реальном масштабе времени и событийноуправляемом моделировании. 5. Синтез ПИД-регуляторов в MATLAB В Simulink имеет пакет Nonlinear Control Design (NCD) Blockset, с помощью которого можно выполнить оптимизацию параметров ПИД-регулятора, если имеется модель объекта управления. В наборе блоков имеется основной блок NCD Outport, с помощью которого можно задать требуемые ограничения для переходного процесса в оптимизируемой системе, указать оптимизируемые параметры и выполнить параметрическую оптимизацию. Окно блока оптимизации NCD_Outport, показано на рисунке 2. Рис. 2. Окно NCD_Outport Кнопка Split позволяет разбивать границы на более мелкие участки для описания переходного процесса с нужной степенью подробности. Кнопки Start и Stop управляют процессом оптимизации. Пункты меню File и Edit содержат обычные операции работы с файлами и редактирования. В меню Options находится ряд опций для более детального описания и отображения переходных процессов. При выборе пункта меню Optimization/Parameters открывается окно (рис. 3), в котором задаются параметры оптимизации и интервал дискретизации. Главные поля этого окна имеют следующие значения: - Tunable variable – окно ввода имен настраиваемых параметров ( 4 в данном случае это коэффициенты ПИД-регулятора – их названия вводятся через пробел, например Kp Ki Kd ). - Lover bound и Upper bound – нижняя и верхняя границы значений настраиваемых переменных. - Discretization interval – интервал дискретизации. Рис. 3. Параметры оптимизации До запуска процесса оптимизации надо задать в окне команд MATLAB начальные значения коэффициентов ПИД-регулятора (например, Kp=1, Ki=0, Kd=0). Блок PID Controller представляет собой описание ПИДрегулятора, он приведен на рисунке 4. Рис. 4. Блок PID Controller 5 Для того чтобы выполнить процесс оптимизации параметров ПИД-регулятора необходимо собрать модель системы управления в Simulink. Пример. Пусть дан объект управления W ( p) 1 . s(0.6s 2 4s 2) Необходимо найти параметры ПИД-регулятора при которых будут выполняться следующие требования к системе: время переходного процесса tпп 5 с, перерегулирование 0 % и установившееся ошибка системы уст 0 . Составим модель системы управления с ПИД-регулятором и блоком оптимизации параметров NCD Outport (рис. 5). Рис. 5. Модель системы управления Перед запуском оптимизации необходимо настроить ПИДрегулятор таким образом, чтобы не было влияние на систему управления. Для этого вторую и третью составляющую уравнения (1) нужно приравнять нулю, т.е. ki 0 и kd 0 . Первая составляющая уравнения (1) описывает обычный усилитель, следовательно, чтобы не было влияния на ошибку, константу k p приравниваем единице. Далее указываем параметры оптимизации и интервал дискретизации в NCD_Outport. 6 После запуска процесса оптимизации в окне NCD_Outport отображаются варианты переходного процесса при изменении настраиваемых параметров. Настройка заканчивается, когда процесс попадает в заданные границы, как показано на рисунке 6. Рис. 6. Окно NCD_Outport с законченным процессом оптимизации В окне команд MATLAB можно просмотреть значения полученных параметров ПИД-регулятора. 6. Задание на лабораторную работу С помощью пакета MATLAB произвести оптимизацию параметров ПИД-регулятора для заданного объекта управления. Вариант задания назначается преподавателем. Таблица 1 № п/п 1 2 Варианты заданий t ПП , Передаточная функция (объект управления) с 1 35 W ( p) 60s 42 s 6s 1 10 W ( p) 2 s(0.01s 0.2 s 1) 3 , % уст 15 0 20 0 2 1.5 7 3 4 5 6 7 8 100 s(0.5s 1) 5 W ( p) (0.05s 1)(0.1s 1)(0.2s 1) 8 W ( p) 4 3 7 s 43s 23s 2 21s 10 W ( p) 2 3s 0.6 s 1 1 W ( p) 3 0.001s 0.06s 2 0.2s 1 1 W ( p) 2 s(2s 3s 1) W ( p) 3 20 0 2 10 0 80 10 0 8 20 0 2 0 0 40 20 0 7. Методика выполнения задания Порядок выполнения работы: 1. Собрать модель системы управления (рис. 1) для заданного варинта объекта управления (см. табл. 1) без регулятора. Построить реакцию на единичный скачок и определить время переходного процесса, перерегулирование и установившуюся ошибку системы. 2. Добавить ПИД-регулятор в модель системы управления и определить значения коэффициентов (параметров) ПИД-регулятора путем интерактивного моделирования на основании методики Зиглера-Николса. Построить реакцию на единичный скачок и определить время переходного процесса, перерегулирование и установившуюся ошибку системы. 3. Найти оптимальные параметры ПИД-регулятора для достижения заданных качеств системы управления, указанных в таблице 1. 8. Требования к содержанию и оформлению отчета Отчет по лабораторной работе должен содержать: а) титульный лист; б) структурную схему системы управления; в) график переходного процесса исходной системы; г) график переходного процесса оптимизированной системы; д) выводы по проделанной работе; е) ответы на контрольные вопросы. 8 Контрольные вопросы 1. В чем назначение регулятора? 2. Что позволяет повысить дифференциальная составляющая в уравнении ПИД-регулятора? 3. Что за инженерный подход существует к синтезу ПИДрегуляторов? Описать основные шаги подхода. 9