Расчетно графическая работа (теория [396 Kb, doc]
реклама

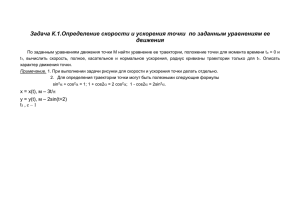
Федеральное агентство морского и речного транспорта. Федеральное государственное образовательное учреждение высшего профессионального образования. «Морской государственный университет им. адм. Г.И. Невельского» Кафедра «ММ и САПР» Расчетно-графическая работа «________________________________________________________» Выполнил: студент 722 гр. Залюбовский С.Л. Проверил: преподаватель Бражник Л.А. Владивосток 2006 1 Виды движений звеньев механизма Рассматривая механизмы различного рода машин и приборов, можно прийти к заключению, что движения, совершаемые их звеньями, несмотря на свое многообразие, не произвольны, а встречаются во вполне установившихся геометрических формах. Поступательное движение. Это такое движение твердого тела, при котором любая прямая, соединяющая две точки тела, движется параллельно самой себе. При этом все точки тела описывают параллельные и тождественные траектории и в каждый данный момент времени имеют одинаковые по модулю и направлению скорости и ускорения. Такое движение совершают ползуны, крейцкопфы, штоки, поршни в двигателях, насосах, компрессорах и других кривошипно-ползунных механизмах. Так как все точки тела движутся одинаково, то тело можно рассматривать как материальную точку, в которой сосредоточена вся его масса, поэтому изучение поступательного движения тела сводится к изучению движения его центра масс. Поступательное движение может совершать только твердое тело, а не отдельная его точка. В зависимости от формы траектории поступательное движение может быть: - прямолинейным, если траектория любой точки поступательно движущегося тела представляет собой прямую линию; - криволинейным, если траектория представляет собой кривую линию. Вращательное движение. Вращательным называют такое движение твердого тела, при котором остаются неподвижными все его точки, лежащие на некоторой прямой, называемой осью вращения. Различают два основных вида такого движения: - вращательное круговое движение (звено совершает полный оборот); такое движение совершают различного рода кривошипы, рукоятки, зубчатые колеса, маховики, валы; - неполное вращательное движение (звено совершает только часть оборота); так движутся поводки, педали, различные балансиры. Каждая точка тела, не лежащая на оси вращения, описывает окружность, плоскость которой перпендикулярна оси вращения, а центр вращения лежит на этой оси (рис. 1). При движении тела угол поворота φ будет непрерывно меняться с течением времени. Зависимость угла поворота от времени описывается уравнением (1), которое выражает закон вращательного движения: φ = φ(t) (1) Характеристикой быстроты изменения угла поворота является угловая скорость тела, равная первой производной от угла поворота по времени: d dt В общем случае при неравномерном вращении угловая скорость изменяется с течением времени, т. е. ω = ω (t) (2) Характеристикой быстроты изменения угловой скорости (функции ω = ω(t) является угловое ускорение тела, равное первой производной от угловой скорости по времени: d dt Если знаки ω и ε одинаковы, то имеет место ускоренное вращение (рис. 2,6), если различны замедленное вращение (рис. 2в). Если ω = const, то S = 0, и вращение тела равномерное (рис. 2а). Соотношение между угловой скоростью вращательного движения и числом оборотов п, совершаемых в одну минуту, выражается формулой: n 30 (3) Число оборотов п, совершаемых в одну минуту называют частотой вращения. При вращении тела все его точки движутся по окружностям, центры которых лежат на оси вращения. Их скорости и ускорения являются величинами векторными и называются линейными. Между угловыми характеристиками вращательного движения тела и линейными характеристиками движения его точек существует определенная зависимость. Модуль вектора линейной скорости точки вращающегося тела равен произведению угловой скорости тела на радиус окружности, описываемой точкой, т. е. V = ω · r. (4) Вектор линейной скорости точки вращающегося твердого тела направлен по касательной к траектории движения в данной точке в сторону вращения твердого тела, т. е. перпендикулярно радиусу вращения. Эта скорость точки называется также окружной скоростью. Векторная величина, характеризующая быстроту изменения модуля и направления линейной скорости, называют линейным ускорением точки. Линейное ускорение точки вращающегося твердого тела в каждый момент времени равно геометрической сумме касательного (вращательного) и нормального (центростремительного) ускорений: n aB aB aB (5) Касательное ускорение точки характеризует изменение модуля ее скорости. Модуль касательного ускорения точки вращающегося твердого тела равен произведению углового ускорения тела на радиус окружности, описываемой точкой, т. е. a r (6) Вектор касательного ускорения точки вращающегося твердого тела направлен по касательной в данной точке к траектории ее движения, т. е. перпендикулярно радиусу вращения. В зависимости от направления углового ускорения он либо совпадает с направлением линейной скорости этой точки (ускоренное движение, рис. 26), либо направлен в противоположную сторону (замедленное движение, рис. 2в). Модуле нормального ускорения точки вращающегося твердого тепа равен произведению квадрата угловой скорости тела на радиус окружности, описываемой точкой, т. е. ап = ω2 ·r (7) Вектор нормального ускорения точки вращающегося твердого тела направлен по нормали (радиусу) окружности, описываемой точкой, в направлении центра вращения тела. При равномерном вращении тела (ω — const) угловое ускорение ε = 0 и, следовательно, касательное ускорение a r = 0, Полное ускорение точки V2 a a r r n 2 (8) При равномерном вращении твердого тела любая его точка имеет только нормальное линейное ускорение, направленное к центру вращения тела. На рис. 2 показаны направления полного, нормального и касательного ускорений в случаях равномерного (рис. 2а), ускоренного (рис. 26) и замедленного (рис. 2в) вращения тела. Рис 2. Сложное движение. Простейшие виды движения твердого тела (поступательное и вращательное) были рассмотрены относительно системы отсчета, связанной с Землей (неподвижной системы координат). Иногда приходится рассматривать движение тела относительно системы отсчета, связанной с каким-нибудь подвижным относительно Земли телом. В этом случае движение тела удобно представить себе как сложное движение, состоящее из двух (или более) независимых движений [3]. Различают следующие движения тела: - относительно неподвижной системы отсчета (абсолютное). - относительно подвижной системы отсчета (относительное), - вместе с подвижной системой отсчета относительно неподвижной системы отсчета (переносное). Соответственно различают абсолютную, относительную и переносную траектории точек твердого тела и абсолютные, относительные и переносные скорости и ускорения точек твердого тела. Абсолютное движение тела - совокупность двух движений: относительного и переносного. Абсолютные скорости и ускорения любой точки твердого тела, совершающего сложное движение, в каждый момент времени определятся как геометрическая сумма относительных и переносных скоростей или ускорений: V àáñ V ïåð V îòí a àáñ a ïåð a îòí (10) (11) Графически абсолютные скорость или ускорение точки твердого тела могут быть определены по правилу параллелограмма или треугольника. Обычно составляющие части сложного движения - это простейшие виды движения тела: поступательное и вращательное. В технике широко встречается один из случаев сложного движения тела плоскопараллельное движение. Например, движение шатуна в кривошипно-ползунном механизме. Плоским называется такое движение, когда все точки движущегося твердого тела перемещаются в плоскостях, параллельных данной неподвижной плоскости. При плоскопараллельном движении твердого тела каждая его точка движется в плоскости. Следовательно, траектория точки расположена в этой плоскости и является замкнутой линией. Изучение плоскопараллельного движения может быть сведено к изучению движения плоской фигуры, образованной сечением тела некоторой плоскостью, параллельной данной неподвижной плоскости, при условии, что расстояние между плоскостями постоянно [3]. Положение плоской фигуры S (рис. 3) в плоскости хОу по отношению к подвижной системе координат x1Ay1 определяется положением какого-либо отрезка АВ, принадлежащего фигуре, которое задается координатами какой-либо его точки, например, точки А и углом φ, образованным отрезком АВ с положительным направлением оси х (углом поворота фигуры). Точка А называется в этом случае полюсом. Всякое произвольное перемещение плоской фигуры, а следовательно, и движение всего тела, определится тремя уравнениями плоскопараллельного движения: XA = XA(t), YA = YA(t), φ A = φ A(t), Первые два уравнения характеризуют поступательное движение твердого тела, третье - вращательное движение. Если при движении будет оставаться постоянным угол φ (φ - const) то тело движется только поступательно. Если при движении не будут изменяться координаты полюса - точки А, то тело совершает вращательное движение, описываемое уравнением (1). Поступательное и вращательное движения можно рассматривать как частные случаи плоскопараллельного движения. Если плоская фигура S за некоторый промежуток времени перемещается в своей плоскости из положения I в положение II (рис. 4), тогда отрезок, соединяющий точки А и В этой фигуры, можно переместить в положение А1В1 одним из двух следующих способов. Первый способ. Перенести отрезок АВ параллельно самому себе в положение В1А1’ (при этом фигура совершит поступательное перемещение), а затем повернуть отрезок вокруг точки А1 против часовой стрелки на угол ф (фигура при этом совершит вращательное движение и займет положение Л). Второй способ. Перенести отрезок АВ в положение В1А1’, а затем повернуть его вокруг точки B1 против часовой стрелки также на угол φ. Точку, вокруг которой фигура совершает поворот, называют полюсом. В первом случае полюсом была точка A1 во втором — В1. За полюс может быть принята произвольная точка фигуры. Изменение положения полюса отразится только на характеристиках поступательной части плоского движения: перемещение, скорость и ускорение полюса будут зависеть от того, какая точка выбрана за полюс. Характеристики вращательной части плоского движения (угол поворота, угловая скорость и угловое ускорение) не будут зависеть от выбора полюса, т. к. угол φ и направление вращения при этом не меняются. Плоскопараллельное движение твердого тела можно разложить на два простых: переносное поступательное движение вместе с точкой, выбранной за полюс, и со скоростью полюса, и относительное — вращательное вокруг оси, проходящей через полюс перпендикулярно плоскости движения. Эти два простых движения совершаются одновременно, а не последовательно. Разложение плоскопараллельного движения на простейшие виды движения используется для определения скоростей и ускорений точек твердого тела. Например, с учетом формулы (10), можно найти абсолютную скорость любой точки, например точки В тела V àáñ V B , приняв за полюс точку А (рис, 5). Она будет равна геометрической сумме двух скоростей: переносной скорости точки при поступательном движении тела, равной скорости полюса V B ïåð V A и относительной скорости точки при вращательном движении тела вокруг этого полюса V B îòí V BA V B V A V BA Согласно формуле (4) модуль скорости точки вращательном движении тела определится по уравнению: при VBA lBA где ω - угловая скорость вращения тела, рад/с; lАВ - радиус траектории точки В относительно полюса А. Вектор скорости VBA перпендикулярен радиусу вращения АВ и направлен в сторону вращения тела. Аналогично можно найти абсолютное ускорение точки В твердого тела à Вабс = à B, приняв за полюс точку А (рис. 6). Оно будет равно геометрической сумме двух ускорений: переносного ускорения точки при поступательном движении тела, равного ускорению полюса à В пер = à А, и относительного ускорения точки при вращательном движении тела вокруг этого полюса à В отн = à BА à B = à A + à BA Относительное ускорение, согласно формуле (5), раскладывается на две составляющие: n a BA a BA a BA Согласно формуле (9) модуль нормального ускорения точки во вращательном движении тела определится из уравнения: a n BA l AB 2 2 VAB l AB n Вектор нормального ускорения à BA направлен по радиусу вращения АВ в сторону полюса А. Вектор касательного ускорения à BA направлен перпендикулярно радиусу вращения АВ в сторону направления углового ускорения вращательного движения тела. Такое определение кинематических параметров характерно для бескулисных механизмов, в которых переносное движение рассматривается как поступательное, относительное - как вращательное. В кулисных механизмах при исследовании движения кинематический пары «камень - кулиса» переносное движение рассматривается как вращательное, относительное движение - как поступательное. Абсолютное ускорение точки в этом случае à абс= à пер + à отн + à кор где à кор - кориолисово (поворотное) ускорение. Кориолисово ускорение: a êîð 2å V îòí Модуль кориолисова ускорения: a êîð 2å V îòí sin( e V îòí ) где ωе - угловая скорость переносного движения. Для плоских механизмов направление кориолисова ускорения можно найти по правилу Н. Е. Жуковского: если вектор относительной скорости Vотн повернуть на угол 90° в направлении угловой скорости ωе переносного движения, то он укажет направление ускорения Кориолиса (рис. 7). Кориолисово ускорение для плоских механизмов равно нулю при поступательном переносном движении (ωе = 0) и в момент, когда относительная скорость равна нулю( V îòí =0). 1.5. Планы скоростей и ускорений При решении задачи определения скоростей и ускорений графоаналитическим методом часто пользуются методом планов [2]. Он осуществляется построением планов скоростей и ускорений, которые представляют собой изображения векторов скоростей и ускорений точек движущегося механизма в данный момент времени. Этот метод основан на классических законах исследования кинематики движущихся тел. Метод отличается универсальностью, наглядностью и простотой. Преимуществом его является то, что в результате построения планов можно определить не только величины, но и направления скоростей и ускорений точек механизма. Построение планов скоростей и ускорений выполняются с учетом масштабных коэффициентов V и a , которые подбирают так, чтобы построения получились достаточно точными, и рационально использовалось поле чертежа. При вычислении масштабных коэффициентов рекомендуется принимать длины отрезков, изображающие вектора скоростей и ускорений точки входного (ведущего) звена, произвольно (как правило, не менее 50 мм). Построение планов рассмотрим на примере кривошипно-ползунного механизма, схема которого представлена на рис. 8. Задан закон движения ведущего звена АВ: звено вращается с постоянной угловой скоростью ω1. Требуется определить линейные скорости и ускорения точек звена ВС методом планов, Звено 0 - стойка, неподвижное звено. Движение точек звеньев относительно стойки является абсолютным. Звено 1 - кривошип, совершает полное вращение. Все точки кривошипа при его вращении описывают окружности различных радиусов, соответственно этому различны их линейные скорости и ускорения. Звено 2 - шатун, совершает плоское движение: левый его конец, совпадающий с центром шарнира В, движется по окружности, а правый конец (центр шарнира С) - по прямой линии. Траектории всех остальных его точек представляют собой разные сложные замкнутые кривые. Звено 3 — ползун, совершает поступательное движение. Все точки ползуна движутся по прямолинейным одинаковым траекториям с одинаковыми скоростями и ускорениями. Построение плана скоростей План скоростей (рис. 8) дает возможность графическим путем определить скорости точек звеньев механизма. Он строится по векторным уравнениям, которые составляются согласно формуле (10) теории о плоском движении. За полюс принимаем шарнир В. Абсолютная скорость точки С шатуна ВС определится как геометрическая сумма переносной скорости полюса В при поступательном движении шатуна и относительной скорости точки С при вращательном движении шатуна относительно точки В: (12) V C V B V CB Это уравнение можно решить графически, как всякое векторное уравнение, содержащее не более двух неизвестных. Абсолютная скорость точки В как точки, принадлежащей одновременно двум звеньям 1 и 2, известна по величине и направлению, так как может быть определена по формуле (4): VB = ω1 · lAB. Вектор V B направлен перпендикулярно звену АВ в сторону его вращения. Вектор скорости в относительном движении V CB перпендикулярен звену ВС, а величина его неизвестна. Вектор абсолютной скорости точки С - ( V C ) как точки, принадлежащей одновременно двум звеньям 2 и 3, направлен вдоль прямой х-х. Решением векторного уравнения (12) будет векторный треугольник, построенный по правилу сложения векторов. Построение можно выполнить на плане механизма (рис. 8а). Однако геометрическое сложение векторов скоростей для многозвенных механизмов в нескольких его положениях неудобно, так как векторные многоугольники скоростей различных точек механизма будут налагаться друг на друга. Векторы будут пересекаться, возникнут затруднения при чтении, расшифровке векторных многоугольников и определении по ним скоростей. Целесообразно построение планов скоростей проводить отдельно для каждого из последовательных положений механизма. Для построения плана скоростей звена ВС в плоскости чертежа нужно выбрать произвольную точку Р1 в качестве полюса (центра) плана скоростей (рис. 86). Из полюса отложить отрезок [p1b1] (в определенном масштабе) параллельно направлению скорости V B . Через точки Р1 и b .проводим прямые, параллельные направлениям скоростей V C и V CB . Точка пересечения этих прямых определяет фигуру Р1bc, которая является планом скоростей звена ВС и решением векторного уравнения (12). Совокупность планов скоростей всех звеньев и точек механизма с одном общим полюсом и одним масштабом называется планом скоростей механизма. Свойства плана скоростей механизма: 1) точкам плана скоростей (b, с) соответствуют одноименные точки (В, С) на плане механизма и наоборот; 2) скорости точек, равные нулю (VA =0), на плане скоростей совпадают с полюсом (р1 = а); 3) любая фигура, построенная на плане скоростей (отрезок, треугольник, многоугольник), обозначенная малыми буквами, подобна соответствующей фигуре, обозначенной большими буквами на плане механизма, и повернута относительно нее на 90° в направлении вращения; 4) отрезки, изображающие векторы абсолютных скоростей точек звеньев механизма на плане скоростей [p1b], [p1c] выходят из полюса плана; 5) отрезки, изображающие векторы относительных скоростей точек звеньев механизма на плане скоростей [bc] соединяют концы векторов абсолютных скоростей и всегда перпендикулярны одноименным отрезкам на схеме механизма (ВС). Теорема подобия для плана скоростей. Отрезки прямых линий, соединяющих точки одного и того же звена на плане механизма, и отрезки прямых линий, соединяющих концы векторов скоростей этих точек на плане скоростей, образуют подобные и сходственно расположенные фигуры. Теорема подобия позволяет определить скорость любой точки звена, если известны скорости двух точек этого звена. Построение плана ускорений План ускорений (рис. 9) дает возможность графическим путем определить ускорения точек звеньев механизма. Прежде чем строить план ускорений, должен быть построен план скоростей и определены линейные скорости заданных точек звеньев механизма и угловые скорости звеньев. План ускорений строится по векторным уравнениям, которые составляются согласно формуле (11) теории о плоском движении. Абсолютное ускорение точки С шатуна ВС определится как геометрическая сумма переносного ускорения полюса В при поступательном движении шатуна и относительного ускорения точки С во вращательном движении шатуна вокруг точки В: (13) à с= à в+ à св. Полное ускорение точки В во вращательном движении вокруг точки А определяется как геометрическая сумма нормального и касательного ускорений: n aB aB aB n Т. к. ω1 = const, ε1 = 0 и a B = 0, то ускорение точки В состоит только из нормального ускорения a B , n известного по величине и на правлению. Согласно формуле (9) ускорение a B 1 l AB VB2 , а его вектор l AB направлен параллельно звену АВ к центру вращения А. Ускорение точки С во вращательном движении вокруг точки В определяется как геометрическая сумма нормального и касательного ускорений: n Нормальное ускорение n aCB 22 l BC a CB a CB a CB V2 CB , а его вектор направлен параллельно звену ВС от С к l BC В. Вектор касательного ускорения a CB перпендикулярен звену ВС, а величина его неизвестна. Вектор абсолютного ускорения точки С направлен вдоль прямой х-х. Уравнение (13) принимает вид: n n a C a B a CB a CB В этом уравнении два неизвестных по величине ускорения a C и a CB , которые определяются в процессе решения. Решением векторного уравнения (14) будет многоугольник, построенный по правилу сложения векторов, который является планом ускорений. Порядок построения плана ускорений (рис. 96): 1) в плоскости чертежа выбрать произвольную точку р2 в качестве полюса плана ускорений; n 2) из полюса р2 параллельно направлению ускорения a B отложить отрезок [p2b] (в определенном масштабе n a ), соответствующий ускорению a B ; n n 3) к вектору a B прибавить вектор a CB , для чего через точку b провести прямую, параллельную n n ускорению a CB И отложить на ней отрезок [bn] соответствующий нормальному ускорению a CB n 4) к вектору a CB прибавить вектор a CB для этого из точки п провести линию, параллельную направлению ускорения a CB до пересечения с линией, параллельной направлению ускорения a C , проведенной из полюса плана ускорений. Точка пересечения этих прямых определяет положение точки С. Совокупность планов ускорений всех звеньев механизма с одним общим полюсом и одним масштабом называется планом ускорений механизма. План ускорений имеет свойства, аналогичные свойствам плана скоростей. Теорема подобия для плана ускорений. Отрезки прямых линий, соединяющие точки одного и того же звена на плане механизма, и отрезки прямых, соединяющие концы векторов полных ускорений этих точек на плане ускорений, образуют подобные и сходственно расположенные фигуры. Планы скоростей и ускорений позволяют определить угловые скорости и угловые ускорения звеньев механизма. Согласно формуле (4), зная относительную скорость, определяем угловую скорость звена 2 2 VCB l BC Направление угловой скорости определяется направлением скорости скоростей изображает относительную скорость V CB . Отрезок [bc] на плане V CB . Согласно формуле (6), зная относительное ускорение a CB , определяем угловое ускорение звена 2 a CB 2 l BC Направление углового ускорения определяется направлением ускорения a CB которому соответствует отрезок [nc]. Отрезок [bc] на плане ускорений изображает относительное ускорение a CB . Из сопоставления направлений ω2 и ε2 видно, что в рассматриваемый момент времени вращательная часть плоского движения шатуна происходит замедленно.