DOC - Удмуртский научный центр УрО РАН
реклама

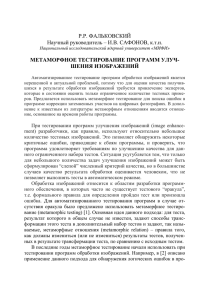
ШЕЛКОВНИКОВ Ю.К., ГАФАРОВ М.Р., ГУЛЯЕВ П.В., ТЮРИКОВ А.В., КИЗНЕРЦЕВ С.Р. УДК 621.385.833 ПОСТРОЕНИЕ ИЗОБРАЖЕНИЙ ПОВЕРХНОСТИ ПРИ МНОГОКАДРОВОМ РЕЖИМЕ СКАНИРУЮЩЕГО ТУННЕЛЬНОГО МИКРОСКОПА ШЕЛКОВНИКОВ Ю.К., ГАФАРОВ М.Р., ГУЛЯЕВ П.В., ТЮРИКОВ А.В., КИЗНЕРЦЕВ С.Р. Институт прикладной механики УрО РАН, 426067, г.Ижевск, ул.Т.Барамзиной, 34 ____________________________________________________________________ АННОТАЦИЯ. В работе рассмотрено решение задачи координатной привязки изображений, получаемых на сканирующем туннельном микроскопе в многокадровом режиме. Предложен метод автоматического вычисления параметров взаимного сдвига кадров с учетом воздействия различных помех. Проведена экспериментальная проверка предложенного метода на реальных изображениях. _______________________________________________________________________________________________ КЛЮЧЕВЫЕ СЛОВА: сканирующий туннельный микроскоп, координатная привязка, относительный сдвиг изображений, зондирующее острие, обработка изображений, функция яркости, структурные элементы изображений. ВВЕДЕНИЕ Сканирующий туннельный микроскоп (СТМ) позволяет неразрушающим способом в диапазоне 1-100 нм получать прямую информацию о нанорельефе поверхности ультрадисперсных частиц (УДЧ) кластерных материалов. При исследовании больших УДЧ с атомарным разрешением СТМ используется в многокадровом режиме с перекрытием. При этом в ряде случаев появляется необходимость выполнения процедуры автоматической координатной привязки зондирующего острия (ЗО) к системе координат, в которой снимались предыдущие кадры. К таким случаям относятся замена ЗО, смещение образца для сдвига поля зрения микроскопа, температурный дрейф конструкции при продолжительном перерыве в работе и др. Для осуществления привязки ЗО позиционируется на ранее отсканированную область исследуемого образца и считывается кадр K0. Далее необходимо решить следующие задачи: выделить на K0 структурные элементы СТМ-изображения, идентифицировать их на ранее отсканированном кадре K j K i i 1, 2,...,s и вычислить параметры искомого трансформирующего преобразования, связывающего новую систему координат с прежней. Кадры K0 и Kj содержат изображения одинаковых структурных элементов, однако изза температурных дрейфов и погрешностей системы позиционирования отличаются взаимным сдвигом 0 = (Δx, Δy). Кроме того, из-за воздействия помех, обусловленных внешними источниками (виброакустических, электромагнитных, электростатических), эти кадры отличаются различным уровнем искажений функции профиля (или функции яркости на СТМ-изображениях этих кадров). Указанные факторы усложняют процесс выделения и идентификации одноименных структурных элементов на K0 и Kj, поэтому актуальной задачей является разработка надежного метода определения их взаимного сдвига. Методы определения параметров сдвига можно подразделить на две группы: интегральные и локальные. Методы первой группы характеризуются тем, что информация о параметрах извлекается путем анализа всего изображения. Чаще всего интегральные методы описания геометрических преобразований основываются на указании их инвариантов, вычислении взаимной корреляции [1,2]. Параметры трансформирующего преобразования определяются по положению центра тяжести изображения, его моментов инерции или по максимуму функции корреляции. Недостатки интегральных методов, наряду с вычислительными 514 ХИМИЧЕСКАЯ ФИЗИКА И МЕЗОСКОПИЯ. Том 10, №4 ПОСТРОЕНИЕ ИЗОБРАЖЕНИЙ ПОВЕРХНОСТИ ПРИ МНОГОКАДРОВОМ РЕЖИМЕ СКАНИРУЮЩЕГО ТУННЕЛЬНОГО МИКРОСКОПА сложностями, обусловлены тем, что при большом уровне яркостных и фоновых помех, их надежность падает и применение возможно лишь при определенных условиях идеализации изображений (например, если допустить, что на всей фоновой части изображения функция яркости B(x,y)=const), что на СТМ-изображениях, как правило, не выполняется. При использовании локальных методов [3] приходится сталкиваться с задачей отождествления на сравниваемых изображениях одноименных точек. Из-за воздействия помех трудно добиться однозначности отождествления точек – как правило, на изображении имеется несколько точек со сходными окрестностями. Применение специальных детерминированных методов устранения неоднозначности часто неприемлемо из-за низкой надежности и больших вычислительных затрат. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ СДВИГА СТМ-ИЗОБРАЖЕНИЙ Сущность предлагаемого метода для решения поставленной задачи заключается в следующем. СТМ-изображение размером m × m задается матрицей B B x, y , где m = 256 и 0 x m 1, 0 y m 1 . Значения элементов матрицы B x, y изменяются в пределах от 0 до 216-1. Пусть два изображения B1 и B2 одного и того же объекта отличаются взаимным сдвигом 0 и элементами фона. Будем рассматривать точки ti изображений вместе с их некоторыми окрестностями радиуса r и обозначать tir . Обозначим через G матрицу, значения элементов которой первоначально равны нулю. Для точки tir B1 на изображении B2 выделим множество Tl i l 1, 2 ,...,q точек, сходных по некоторому критерию R с точкой tir . Между точками Tl i и точкой tir вычислим взаимные сдвиги и получим множество сдвигов i l l 1, 2,...,q . Установим однозначное соответствие между величиной сдвига и элементом g матрицы G. Теперь увеличим на "1" те элементы матрицы G, которые определяются множеством il . Далее, описанную процедуру повторим для следующей точки tir1 B1 . Можно показать, что после повторения такой процедуры для достаточно большого числа или всех точек B1 элемент матрицы G, соответствующий искомой величине сдвига 0 , примет наибольшее значение среди остальных. Действительно, в каждом описанном выше цикле появление в множестве il l 1, 2,...,q элемента, равного истинной величине взаимного сдвига 0 изображений B1 и B2 , носит регулярный характер, так как для одноименных точек этих изображений параметр сдвига обладает интегральным свойством. Поэтому значение соответствующего 0 элемента матрицы G будет стремиться к величине n, где n - число точек, выбранных на изображении B1 . Значения же остальных (q - 1) элементов множества представляют i l случайную величину, а сами они соответствуют точкам фона или разноименным точкам изображений. Следовательно, в каждом из n циклов будет корректироваться случайный набор из (q - 1) элементов матрицы, то есть значения всех (кроме g( 0 )) элементов G будут меньше n. Таким образом, величину сдвига можно определить как 0 argmax G . ХИМИЧЕСКАЯ ФИЗИКА И МЕЗОСКОПИЯ. Том 10, №4 (1) 515 ШЕЛКОВНИКОВ Ю.К., ГАФАРОВ М.Р., ГУЛЯЕВ П.В., ТЮРИКОВ А.В., КИЗНЕРЦЕВ С.Р. Поскольку изображения обрабатываются путем их локального анализа, появляется возможность эффективным образом устранить яркостные искажения частей изображения. В большинстве случаев для небольшой окрестности точки изображения такие искажения достаточно хорошо аппроксимируются линейной функцией. Поэтому, в качестве меры близости R можно использовать, например, взаимную корреляцию R 1 , 2 t x, y t x , y 1 x 2 1 2 y (2) t x , y 2 2 x 1 2 y или коэффициент корреляции [4]. Указанная функция рассчитывается для всех возможных значений взаимного сдвига изображений τ1, τ2 и имеет пик в том месте, где изображения совпадают. Таким образом, помехоустойчивость данного метода определения сдвига достигается за счет следующих факторов: 1) внесения большой избыточности в искомые параметры сдвига на основе его интегрального свойства; 2) нейтрализации яркостных искажений путем локального анализа изображений. Описанный выше метод раскрывает только общую схему последовательности необходимых действий. Однако с точки зрения практической реализации важным является сокращение объема вычислительных затрат. Отличительной особенностью метода является принцип многократного измерения одной и той же величины - параметра преобразования. Уровень избыточности информации об искомом параметре, достигаемый при этом, может оказаться излишним для удовлетворения требований надежности и точности. Поэтому можно говорить о рациональном выборе числа необходимых измерений величины параметра преобразования с учетом заданных требований по надежности в каждом конкретном случае. Контроль за достигнутой достоверностью результатов измерений может осуществляться с помощью величины превышения максимума в матрице G над средним значением ее остальных элементов. Матрица G используется для построения гистограммы распределения сдвигов il , получаемых в процессе отождествления точек изображений B1 и B2 . Пусть t n T l i 1 i для n точек изображения B1 на B2 выделено множество l 1, 2,...,q точек со сходными окрестностями. По этим точкам будет вычислено множество C t n i 1 i l l 1, 2,...,q значений параметров сдвига, однако только n из них равны искомой величине 0 , остальные значения будут носить случайный характер, равновероятный для всего диапазона возможных значений параметра . Поэтому это множество можно также представить как C t C0 C f (где C0 – множество, содержащее искомые значения параметров сдвига, а C f – множество их ложных значений). Плотность вероятности для ложных значений равна: 1 Qn pf 2 , Q d (3) где Q = q·n – общее число вычисленных значений параметра ; d – диапазон возможных значений параметра сдвига. Таким образом, после получения распределения значений параметров сдвига в матрице G, задачу извлечения информации о параметрах сдвига можно представить как выделение сигнала из шума. Сигналом на входе системы (которая определяет значение неизвестного параметра) является распределение, полученное в виде гистограммы G. 516 ХИМИЧЕСКАЯ ФИЗИКА И МЕЗОСКОПИЯ. Том 10, №4 ПОСТРОЕНИЕ ИЗОБРАЖЕНИЙ ПОВЕРХНОСТИ ПРИ МНОГОКАДРОВОМ РЕЖИМЕ СКАНИРУЮЩЕГО ТУННЕЛЬНОГО МИКРОСКОПА Важное значение для разработки указанной системы приобретает такая характеристика входного сигнала, как отношение амплитуды входного сигнала к уровню помех. Оценим это отношение для данного случая. Плотность вероятности, составляющую пик распределения можно оценить следующим образом: 1 Qn (4) max pc n 2 . Q d Тогда отношение «сигнал/шум» w для распределения pc будет равно: w max pc nd 2 1 . pf Qn (5) Видно, что w зависит от двух величин – d 2 и Q. Но значение d 2 постоянно и известно заранее. Поэтому будем считать w w Q . Исходя из этого, можно сформулировать определенные требования к «источнику сигнала», то есть к характеристикам тех этапов разрабатываемого метода, которые были использованы для построения распределения pc . В первую очередь, это относится к этапу получения множества точек со сходными окрестностями t . Известно, что на практике для увеличения надежности при приеме сигналов задается ограничение на величину w: w wmin . Поэтому, с учетом (5), можно определить максимальное значение Q: d2 (6) Qmax n 1 . w 1 min Для сохранения заданного отношения сигнал/шум необходимо выполнить условие Q Qmax . Реальные СТМ-изображения характеризуются еще и тем, что отмеченные выше помехи искажают не только яркостные характеристики, но и сказываются на изменении на них формы структурных элементов и, как следствие, в множестве C0 значения параметров сдвига будут подвергнуты случайным изменениям, а в матрице G форма пика будет деформироваться. Если эти случайные изменения множества C0 описываются нормальным законом распределения, то можно записать: 1 Qn n , max pc 2 (7) Q d 2 D C 0 где D C0 – дисперсия. Отношение «сигнал/шум» для распределения p c выразится как max pc nd 2 w 1 . pf 2D C0 (8) Это отношение зависит от дисперсии D C0 , то есть от степени разброса значений параметров сдвига, вычисленных по одноименным точкам. Следовательно, можно задать ограничение на допустимые искажения структурных элементов СТМ-изображений в виде (9) D C0 Dпред , где nd 2 Dпред 1 (10) . Q n 2 w min ХИМИЧЕСКАЯ ФИЗИКА И МЕЗОСКОПИЯ. Том 10, №4 517 ШЕЛКОВНИКОВ Ю.К., ГАФАРОВ М.Р., ГУЛЯЕВ П.В., ТЮРИКОВ А.В., КИЗНЕРЦЕВ С.Р. Если для некоторого класса СТМ-изображений установлено максимальное значение дисперсии D C0 max , то можно выразить ограничение на величину Q в виде: Q Qmax , (11) где из (8) Qmax d 2 n 1 wmin 1 2D C0 max . (12) Ограничения (9) и (11) позволяют сократить объем вычислений при сохранении относительного превышения wmin максимума распределения pc над остальной ее частью. Другой предпосылкой сокращения объема вычислений является рациональное кодирование функции яркости вблизи анализируемых точек малым числом постоянных функций (в дальнейшем называемых базисными функциями). Эффективность применения базисных функций при выделении структурных элементов изображений проявляется на этапе выявления множества t точек со сходными окрестностями и обусловлена следующими факторами: 1. Количество базисных функций k, используемое для кодирования окрестностей точек, может быть существенно меньше числа точек окрестности при исходном описании. Поэтому определение сходства окрестностей точек, описанных в базисе, требует намного меньше вычислений, чем, например, по формуле (1). 2. При описании окрестностей точек в базисе H1 ,H 2 ,...,H k отбираются лишь те, которые соответствуют «нерегулярностям» изображения. Поэтому на сравниваемых изображениях B1 и B2 уменьшается общее число отождествляемых точек. Таким образом, в выбранном базисе H1 ,H 2 ,...,H k окрестность точки будет описываться k числами: h1 ,h2 ,...,hk . Степень «нерегулярности» функции яркости в пределах окрестности некоторой точки можно выразить в виде длины вектора h h1 ,h2 ,...,hk : h h12 h22 ... hk2 . (13) Точки с «нерегулярностями» можно отобрать, назначив порог hp по правилу h hp . Для оценки сходства окрестностей точек в выбранном базисе может быть взята наиболее простая метрика, так как при получении чисел h1 ,h2 ,...,hk учтено влияние помех. Поэтому меру сходства описаний h1 ,h2 ,...,hk и h1,h2 ,...,hk окрестностей двух точек можно определить как Rb h1 h1 h2 h2 2 2 ... hk hk . 2 С математической точки зрения в качестве базисных может быть выбрана любая ортонормированная система функций. Однако, более эффективным является применение базиса, который строится на основе статистических H1 H2 H3 свойств изображений. Последние выражаются в неоднородности спектра пространственных частот – огибающая спектра для реальных полутоновых изображений быстро спадает в направлении от нижних частот к верхним [1]. С учетом изложенного, для описания СТМ-изображений были выбраны три базисные функции приведенные на Рис. 1. Базисные функции рис. 1. 518 ХИМИЧЕСКАЯ ФИЗИКА И МЕЗОСКОПИЯ. Том 10, №4 ПОСТРОЕНИЕ ИЗОБРАЖЕНИЙ ПОВЕРХНОСТИ ПРИ МНОГОКАДРОВОМ РЕЖИМЕ СКАНИРУЮЩЕГО ТУННЕЛЬНОГО МИКРОСКОПА РЕЗУЛЬТАТЫ И ИХ ОБСУЖДЕНИЕ Для экспериментальной проверки предлагаемого метода координатной привязки использовались СТМ-изображения одного и того же участка поверхности образца, полученные в разное время и с различными зондирующими иглами (рис. 2). Для сокращения перебора на сравниваемых кадрах K0 и Kj предварительно выделялись фрагменты изображений наиболее значимые для последующего анализа, характеризующиеся наибольшей изменчивостью функции яркости на локальных участках (рис. 3). Для их выделения использовался порог hp = 0,45. Результаты экспериментов подтвердили высокую надежность определения параметров взаимного сдвига СТМ-изображений. Рис. 2. СТМ-изображения кадров K0 и Kj . Рис. 3. Структурные элементы кадров K0 и Kj, выделенные для вычисления параметров взаимного сдвига. Сдвиг обусловлен температурным дрейфом конструкции. Для K0 и Kj взаимный сдвиг составил Δx = -5, Δy=13 ХИМИЧЕСКАЯ ФИЗИКА И МЕЗОСКОПИЯ. Том 10, №4 519 ШЕЛКОВНИКОВ Ю.К., ГАФАРОВ М.Р., ГУЛЯЕВ П.В., ТЮРИКОВ А.В., КИЗНЕРЦЕВ С.Р. СПИСОК ЛИТЕРАТУРЫ 1. Прэтт У. Цифровая обработка изображений. М.: Мир, 1982. 790 с. 2. Мясников Е.В. Определение параметров геометрических трансформаций для совмещения портретных изображений // Компьютерная оптика. 2007. Т. 31, №3. С.77-82. 3. Форсайт Д., Понс Ж. Компьютерное зрение. Современный подход. М.: Вильямс, 2004. 928с. 4. Brown L.G. A survey of image registration techniques // ACM Computing Surveys. 1992.Vol.24. P. 325–376. _______________________________________________________________________________________________ THE SURFACES IMAGE OBTAINING IN THE MULTISCAN MODE OF THE SCANNING TUNNEL MICROSCOPE Shelkovnikov Yu.K., Gafarov M.R., Gulyaev P.V., Tyrikov A.V., Kiznertsev S.R. Institute of applied mechanics Ural Branch Russian academy of sciences, Izhevsk, Russia SUMMARY. In work the decision of a problem of a co-ordinate binding of images received on a scanning tunnel microscope is considered at research of the big sites of a surface. The method of automatic calculation of parametres of mutual shift of shots taking into account influence of various hindrances is offered. Experimental check of the offered method on real images is spent. KEYWORDS: Scanning tunneling microscopy, coordinate binding, relative image shift, probe tip, image processing, brightness function, image structure elements _______________________________________________________________________________________________ Шелковников Юрий Константинович, доктор технических наук, профессор, зав. отделом методов и средств исследования материалов и процессов механики ИПМ УрО РАН Гафаров Марат Ренатович, аспирант ИПМ УрО РАН Гуляев Павел Валентинович, кандидат технических наук, старший научный сотрудник ИПМ УрО РАН Тюриков Александр Валерьевич, кандидат физико-технических наук, старший научный сотрудник ИПМ УрО РАН Кизнерцев Станислав Рафаилович, кандидат технических наук, старший научный сотрудник ИПМ УрО РАН тел. (3412) 59-58-04, e-mail: evshelk@mail.ru 520 ХИМИЧЕСКАЯ ФИЗИКА И МЕЗОСКОПИЯ. Том 10, №4