Цель работы
реклама

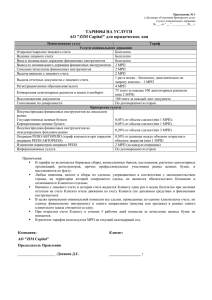
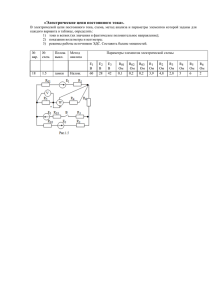
Цель работы 1. Изучить принцип действия, области применения и схемы магниторезистивных преобразователей (МРП). 2. Экспериментально определить характеристики магниторезистивного преобразователя перемещений (МРПП). Общие сведения Назначение, принцип действия и электрические схемы включения магниторезистивных преобразователей Магниторезистивные преобразователи (МРП) предназначены для преобразования магнитной индукции, линейных и угловых перемещений в электрический сигнал. Они применяются в навигационных приборах, устройствах контроля параметров окружающей среды и режимов работы различных агрегатов летательного аппарата. Магниторезистивные преобразователи основаны на использовании эффекта Гаусса, который проявляется в изменении электрического сопротивления преобразователя от влияния внешнего магнитного поля. Эскиз конструкции МРП изображен на рис.1,а). Здесь представлена пластина 1, изготовленная из полупроводникового материала, с размерами , с двумя напыленными электродами 2. При включении МРП в электрическую цепь ток в пластине, если магнитная индукция В=0, обуславливается носителями зарядов: электронами и дырками, перемещающимися по прямолинейным траекториям. Сопротивление пластины, при наличии носителей зарядов двух знаков, определяется выражением Где: - заряд электрона; - средняя концентрация и подвижность электронов; - средняя концентрация и подвижность дырок, - соответственно длина и сечение пластины. При наличии внешнего магнитного поля с индукцией В (рис. 1,б)) на носители зарядов действует сила Лоренца Где: - нормальная проекция магнитной индукции; V- вектор скорости движения носителей заряда. При этом траектории носителей движения зарядов становятся нелинейными, а так же изменяется их подвижность (рис 1,6). Эти отклонения, увеличивающие путь электронов, приводят к возрастанию сопротивления полупроводника. Статическая характеристика МРП имеет вид [1,2] Где: - сопротивление полупроводниковой пластины при отсутствии магнитного поля; - приращение сопротивления полупроводниковой пластины под влиянием магнитного поля; - сопротивление полупроводника при наличии магнитного поля; - подвижность носителей тока; - размерный коэффициент, характеризующий поле, материал и форму полупроводниковой пластины. Магниторезисторы изготовляются из полупроводниковых материалов таких как антимонид индия (InSb), арсенид индия (InAs) и др., в которых сильно проявляется магниторезистивный эффект вследствие большой подвижности носителей заряда. Магниторезистивный коэффициент зависит от формы конструкции МРП. На рис. 2,а) показаны статические характеристики МРП, отличающиеся только отношениями длины и ширины. Обычно используют для магниторезисторов форму пластины, имеющей малое отношение длины к ширине. Габаритные размеры магниторезисторов составляют единицы миллиметров. Для увеличения сопротивления МРП изготавливаются в виде ряда коротких участков, соединенных перемычками (рис. 2,б). Из статической характеристики следует, что с помощью МРП можно непосредственно измерять индукцию магнитных полей. Это используется в широком диапазоне изменения магнитной индукции от Т до Т. Измерение же других параметров (перемещений, усилий, давлений и других физических величин) основано на косвенном методе, при котором необходимо вначале обеспечить взаимосвязь между исследуемым параметром X и изменением индукции магнитного поля Вг. Это приведет к изменению относительного сопротивления , по которому можно судить об измеряемом параметре. На рис. 3 показаны возможные схемы конструкций магниторезистивных преобразователей перемещений (МРПП). На рис. 3,а изображена магнитная схема 1 с переменным воздушным зазором, а следовательно, переменной величиной магнитной индукции МРП 2 при перемещении может занимать различное положение в воздушном зазоре системы и от этого будет изменяться магнитная индукция него. воздействующая на На рис 3,б изображена магнитная система с подвижным якорем 3. МРП укреплен на полюсах 2 постоянных магнитов 1. Магнитная индукция в рабочих зазорах, воздействующая на МРП, меняется при перемещении якоря. Электрические схемы включения магниторезисторов приведены на рис. 4. В схеме делителя напряжений (рис. 4,а) используются два магниторезистора с сопротивлениями и , и терморезистор включенные в цепь питания Выходной сигнал Терморезистор постоянного или переменного тока. снимается с одного из магниторезисторов. сопротивление которого зависит от изменения температуры, служит для компенсации температурных погрешностей. Мостовая схема (рис. 4,б) состоит из двух магниторезисторов с сопротивлениями , и двух терморезисторов . Терморезисторы, являясь плечами моста, одновременно обеспечивают компенсацию температурных погрешностей. Погрешности магнитоэлектрических преобразователей: МРП свойственны методические и инструментальные погрешности. Методические погрешности определяются следующими факторами: 3. Нелинейностью статической характеристики. 4. Непостоянством магнитного поля из-за размагничивающего влияния тока в магниторезисторе. 5. Нагревом магниторезистора электрическим током. 6. Инерционностью носителей тока полупроводникового материала. 7. Инерционностью подвижного элемента конструкции. Инструментальные погрешности выражаются влиянием следующих факторов: 1. Неточностями изготовления деталей и сборок. 2. Изменением температуры окружающей среды. 3. Временными изменениями свойств материалов. 4. Изменением внешнего магнитного поля. 5. Непостоянством напряжения источника питания. Экспериментальная часть Задание 1. Ознакомиться с теоретической частью. 2 . Ознакомиться с исследуемым терморезистивным преобразователем перемещений. 3 . Ознакомиться с лабораторной установкой. 4. Определить статические характеристики МРП и и построить их графики. 5. Сделать выводы по работе. Оценить погрешность проведенного эксперимента с учетом погрешностей используемых приборов. Описание исследуемого магниторезистивного преобразователя перемещений (МРПП) Магниторезистивный преобразователь перемещений предназначен для измерения линейных перемещений в диапазоне (0,..,1.5) мм. Выходным сигналом является напряжение постоянного тока. Принципиально-конструктивная схема магнитной системы преоборазователя приведена на рис.5. В качестве источников магнитных потоков используются два неподвижных идентичных магнита 3, 8 с полюсными наконечниками 2,4 и 7,9. На торцах полюсных наконечников 2 и 7 расположены соответственно магниторезисторы и В начальном положении ферромагнитный якорь 5 (концентратор магнитных силовых линий) расположен посередине рабочих зазоров. При перемещении якоря 5, изменяются магнитные сопротивления воздушных зазоров, что приводит к изменению индукции и магнитных потоков, пронизывающих магниторезисторы 1 и 6. Например, увеличивается омическое сопротивление магниторезистора 6 и уменьшается омическое сопротивление магниторезистора сигнала 1, что приводит к изменению выходного электрической схемы, в которую включены магниторезисторы. Описание лабораторной установки. Электрическая схема лабораторной установки приведена на рис. 6, где МРПП - исследуемый магниторезистивный преобразователь перемещений, ПН преобразователь напряжения переменного тока 220В, 50Гц в напряжение постоянного тока 6 В - для питания установки и 9В - для питания цифрового вольтметра; Пр - предохранитель; JT - сигнальная лампа; П1 - выключатель цепи питания; П2 - переключатель каналов МРПП; V - вольтметр. Питание электрической схемы осуществляется от сети переменного тока 220 В, 50 Гц. Поскольку исследуемый МРПП работает при напряжении питания постоянного тока 6 В, то требуемое напряжение обеспечивает преобразователь напряжения ПН. Конденсаторы С1 и СЗ сглаживают пульсации питающего напряжения, а стабилизаторы DA1 и DA2 служат для стабилизации напряжения 6 В и 9В. На рис. 7 изображена блок-схема лабораторной установки (вид сверху). На панели I смонтирован исследуемый магниторезистивный преобразователь 4 (МРПП), шток которого соединен со стрелочным индикатором 3 (СИ), который, в свою очередь, связан с микрометрическим винтом 2 (MB). Включение напряжения питания 220В, 50Гц производится тумблером 8 (П1) через предохранитель 7 (Пр). При этом загорается сигнальная лампа 9 (JI). Далее с помощью преобразователя напряжений 10 (ПН) происходит понижение напряжения и стабилизация его до 6В и 9В. Выходной сигнал измеряется с помощью вольтметра 6 (V). Справа внизу панели показана конструкция магниторезистивного преобразователя перемещений 11. Порядок проведения эксперимента. 1. Подключить установку к сети питания 220В, 50Гц . 2. Установить микрометрический винт MB в крайнее правое положение. 3. Установить тумблер П1 в положение "Вкл." При этом загорится сигнальная лампа JI. Измерение зависимости 4. Установить переключатель П2 в положение I. 5. Записать начальное значение с вольтметра V в таблицу. 6. Перемещать микрометрический винт влево до тех пор пока значения на вольтметре V не начнут изменяться. 7. Повернуть шкалу стрелочного индикатора (СИ) так, чтобы стрелка индикатора совпала с нулем на шкале. Записать значение вольтметра в таблицу. 8. Перемещать микрометрический винт в диапазоне от 0 до 1,4 мм с шагом 0,1 мм, контролируя перемещение микрометрического винта MB по стрелочному индикатору СИ, снять показания вольтметра V. Результаты измерений занести в таблицу. Измерение зависимости L 9. Установить переключатель П2 в положение II. 10. Произвести измерения по методике, изложенной в пунктах 6,7,8. 11. Установить тумблер П1 в положение «Выкл». Таблица 12. Зависимости нанести на один график статических характеристик и предъявить преподавателю для проверки. 13. Рассчитать напряжение на выходе измерительного моста преобразователя . Результаты расчёта занести в таблицу. 14. На основе полученных точек построить график 15. Визуально определить участок характеристики, который может считаться условно линейным. Обозначить эту область на графике. Графически, по методу наименьших квадратов, аппроксимировать характеристику полиномом первого порядка с точностью 5%. Определить диапозон измерения по входным и выходным величинам, чувствительность и погрешность нелинейности статической характеристики на выбранном участке. Требования к отчету по работе. Отчет должен содержать: 1. Ф. И. О., группа; 2. название, задание работы; 3. принципиальную электрическую схему лабораторной установки; 4. таблицу и графики результатов исследований; 5. перечень измерителей входных и выходных величин и их точность; 6. выводы о проделанной работе. Литература. 1. Лаврова А. Т. Элементы автоматических приборных устройств,- М.: Машиномтроение, 1975г. 2. Шихин А. Я . Автоматические магнитоизмерительные системы. - Библ. по автоматике. Вып. 575 -М.: Энергия, 1977г. 3. Котенко Г. И. Гальваномагнитные преобразователи и их применение. - JL: Энергоиздат, 1982г. 4. Мартынов Ю. И. и др. Магниторезистивный датчик низких давлений,Приборы и системы управления. - 1982г.