ДАТЧИК ИНТРОСКОПА МД - 11ПМ (*, 6,8Мб)
реклама
")
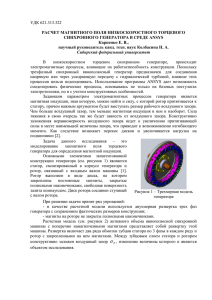
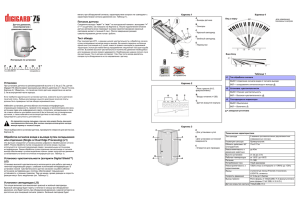
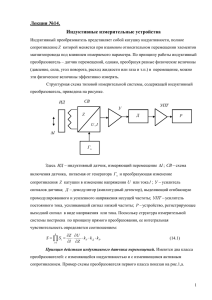
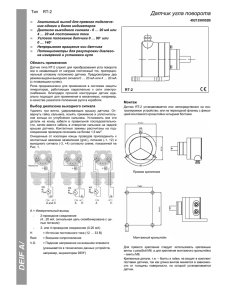
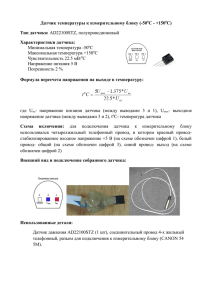
1 УДК 620.179.14 ДАТЧИК ИНТРОСКОПА МД 11ПМ Вильданов Р.Г. Уфимский государственный нефтяной технический университет филиал в г. Салавате Задача обеспечения надежной работы оборудования нефтегазового комплекса не решена несмотря на то, что промышленность выпускает широкую номенклатуру средств неразрушающего контроля и имеются различные методы диагностики оборудования. В работе [1] разработан интроскоп для оценки поврежденного и напряженно – деформированного состояния конструкций, основанный на измерении потерь перемагничивания в металле. Принцип действия интроскопа основан на том факте, что если ферромагнитный материал подвергается периодическому перемагничиванию, то в нем возникают потери энергии на гистерезис и вихревые токи. В данной работе проведены теоретические и экспериментальные исследования чувствительности датчика интроскопа, изучено влияние мешающего фактора – воздушного зазора и намечены пути преодоления. Датчик потерь перемагничивания создает в контролируемом изделии переменное магнитное поле и представляет собой приставной электромагнит с двумя полюсами и двумя обмотками: возбуждения и измерительной. К обмотке возбуждения подводится переменное напряжение от генератора опорных частот, а напряжение измерительной обмотки обрабатывается амплитудным или фазовым методом. На рисунках 1 и 2 представлены устройство и эквивалентная расчетная схема датчика. I1 U1 W1 ФЭ ФЭ F1 ФИ Рисунок 1- Датчик потерь перемагничивания: W1- число витков обмотки возбуждения; I1, U1- ток и напряжение обмотки возбуждения. 2 RПЕР RП1 RП2 ФЭ ФЭ М UСЭ RF1 F1 RИ Rб UСИ ФИ Рисунок 2- Эквивалентная расчетная схема: UСЭ - падение магнитного потенциала в электромагните; UСИ - падение магнитного потенциала в изделии; RП1, RП2 магнитные сопротивления полюсов; RПЕР – магнитное сопротивление перемычки; RИ, R - магнитные сопротивления изделия и двух зазоров между изделием и полюсами; RF1 – магнитное сопротивление потоку рассеяния; М – магнитодвижущая сила обмотки возбуждения. Уравнения спинок петель гистерезиса изделия и электромагнита: ФИ U СИ U И RИ (1) U СЭ U Э RЭ (2) ФЭ Уравнения магнитостатики: ФЭ ФЭ F1 (3) U И ФИ * RИ F1 * RF1 M ФЭ * RЭ (4) F1 * RF1 U И ФИ * Rб (5) Подставив F1 из второго уравнения в третье, а ФИ - из первого уравнения, получим: ФЭ После преобразования U СИ U И I1 *W1 ФЭ * RЭ U СЭ . RИ RF 1 3 ФЭ U СИ U И I *W1 U СЭ RF 1 . * 1 RИ RF1 RЭ RF1 RЭ С учетом UИ= F1*RF1+Ф1*R получим ФЭ U СИ F1 * RF1 ФИ * Rб I *W1 U СЭ RF 1 * 1 RИ RF1 RЭ RF1 RЭ (6) Полагая поток рассеяния F1 малой величиной, можно допустить, что ФЭ=ФИ. Тогда, после преобразования получим: U СИ *C B RИ , ФЭ Rб 1 *C RИ где C RF 1 , RF1 RЭ B I 1 * W1 U СЭ . RF1 RЭ Чувствительность датчика при амплитудном способе обработки напряжения: U R *C dФЭ U СИ * C R 1 б * C СИ * C B б 2 . 2 dRИ RИ RИ RИ RИ (7) Cуммарный фазовый сдвиг, с которым прямо пропорционально связана фазовая чувствительность [2] RЭ RИ R 1 2 arctg 1 RЭ RИ R RИ m * p1,0 * B arctg U1 * I О n (8) Из уравнения (8) видно, что тем больше, чем меньше суммарное магнитное сопротивление цепи. На рисунке 3 приведена теоретическая зависимость магнитного потока датчика от магнитного сопротивления воздушного зазора, построенная по уравнению (6). Из графика видно, что с увеличением воздушного зазора между датчиком и изделием магнитный поток датчика уменьшается. На графике выделена точка, соответствующая зазору 0,1 мм. 4 ΦЭ, Вб ×10-8 50 40 30 зазор 0,1мм 20 10 0 2 4 6 8 10 12 14 16 ×107 Rб, А/Вб Рисунок 3 – Зависимость магнитного потока датчика от магнитного сопротивления воздушного зазора. Теоретическая чувствительность магнитного потока датчика при амплитудном способе обработки напряжения представлена на рисунке 4. Амплитудная чувсвительность dФЭ/dRИ высока при малых значениях магнитного сопротивления изделия и значительно снижается при увеличении магнитного сопротивления. dФЭ /dRИ ×10-8 600 500 400 300 200 100 0 20000 4000 0 60000 80000 RИ, A/Bб Рисунок 4 – Зависимость чувствительности датчика от магнитного сопротивления изделия. Теоретическая кривая зависимости фазы сигнала датчика от магнитного сопротивления изделия при фазовом способе обработки напряжения представлена на рисунке 5. Из графика видно, что при малых значениях магнитного сопротивления 5 изделия изменения фазового сдвига значительны, а при больших значениях магнитного сопротивления чувствительность снижается по экспоненте. Δφ, град 80 70 60 50 40 30 20 10 0 50000 100000 150000 200000 RИ, А/Вб Рисунок 5 – Зависимость фазы сигнала датчика от магнитного сопротивления изделия. Теоретическая кривая зависимости фазы сигнала датчика от магнитного сопротивления воздушного зазора при фазовом способе обработки напряжения представлена на рисунке 6. Фазовая чувствительность датчика имеет высокие значения при малых значениях магнитного сопротивления воздушного зазора. С ростом воздушного зазора фаза выходного сигнала стабилизируется, а чувствительность снижается. Δφ, град 80 70 60 50 40 30 20 10 0 5 10 15 ×107 Rб, А/Вб Рисунок 6 – Зависимость фазы сигнала датчика от магнитного сопротивления воздушного зазора. 6 Из уравнения (8) следует, что суммарный фазовый сдвиг прямо пропорционально зависит от индукции в изделии и массы металла, следовательно, и объема, дефекта. Теоретическая кривая зависимости фазы сигнала от массы металла приведена в работе [2]. Правильность полученных выводов была проверена экспериментальными исследованиями. На рисунке 7 представлены результаты экспериментальных исследований датчика на высших гармониках с использованием программного комплекса SpectraLab. Методика проведения эксперимента описана в работе [2]. Из графика видно, что наблюдается закономерность снижения потерь при уменьшении толщины чувствительность изделия, датчика на что высших согласуется гармониках с рисунком в десятки 4. раз Однако выше чувствительности на основной гармонике. На основной гармонике при изменении толщины от 10 мм до 6 мм выходной сигнал уменьшился лишь на 17%, в то время как уменьшение сигнала на пятой гармонике составило 250%. Рисунок 7 График зависимости высших гармоник от толщины металла: Н– толщина металла, мм; U–изменение выходного сигнала в процентах. График зависимости амплитуды выходного сигнала от величины воздушного зазора на частоте 25 Гц приведен на рисунке 8. Из рисунка видно, что увеличение величины 7 воздушного зазора приводит к снижению амплитуды выходного сигнала датчика, что согласуется с графиком на рисунке 3. Uвых, В 7 6 5 4 3 2 1 0 0 2 4 6 8 10 S,12мм Рисунок 8 Зависимость амплитуды выходного сигнала от величины воздушного зазора на частоте 25 Гц: Uвых– амплитуда выходного сигнала датчика потерь перемагничивания; S величина воздушного зазора. На рисунке 9 показана зависимость фазы выходного сигнала датчика от величины воздушного зазора для частот 250 и 25 Гц при работе в фазовом режиме. Видно, что характер изменения фазы выходного сигнала при теоретическом и экспериментальном исследовании одинаков. На рисунке 10 представлена зависимость выходного сигнала от объема дефекта, полученная с помощью программного комплекса SpectraLab, который формирует ток возбуждения, выполняет обработку измерительного сигнала, анализирует высшие гармониик выходного сигнала. Из рисунка 10 видна однозначная монотонная зависимость амплитуды выходного сигнала датчика от объема дефекта. Изменение наклона кривых в зоне больших объемов объясняется, по – видимому, изменением соотношения между потерями на гистерезис и потерями на вихревые токи. Также видно, что чувствительность на высших гармониках в десятки раз выше, чем на основной гармонике. Так, на основной гармонике 25 Гц при изменении объема 8 дефекта от 2500 мм3 до 100 мм3 выходной сигнал на основной гармонике изменился на 17%, в то время как на шестой гармонике изменение выходного сигнала составило 680 %. Δφ, град 60 50 40 30 20 10 0 0 1 2 3 4 250 Гц 5 6 7 8 мм 9 S,10 25 Гц Рисунок 9 Зависимость фазы выходного сигнала датчика от величины воздушного зазора. φ приращение фазы выходного сигнала, S величина воздушного зазора. Рисунок 10 График зависимости выходного сигнала от объема дефекта. 9 Сопоставительный анализ теоретических и экспериментальных кривых показывает, что характер изменения графиков одинаков. Отклонения абсолютных значений фазы выходного сигнала на экспериментальных кривых (рисунок 9) от теоретических значений (рисунок 6), а также различие наклонов кривых объясняются тем, что на выходной сигнал датчика оказывает влияние большое многообразие факторов, учет которых при теоретическом исследовании практически невозможен. Выходной сигнал датчика очень сильно зависит от величины воздушного зазора (рисунки3,6,8,9). Поэтому в интроскопе уделено особое внимание уменьшению влияния воздушного зазора на выходной сигнал. Способ отстройки от влияния воздушного зазора электронной обработкой сигнала приводит к усложнению схемы интроскопа. Автором разработана схема двухчастотного интроскопа, в которой на одной частоте происходит отстройка от влияния воздушного зазора, а на другой измерений потерь перемагничивания в целях диагностики. Данный режим работы является предметом отдельной статьи, поэтому в данной работе ограничимся приведением различных конструкций датчиков с проволочным магнитопроводом, наиболее просто решающими проблему контроля оборудования с неровной поверхностью (рисунок 11). Рисунок 11 Конструкции датчиков с проволочным магнитопроводом. 10 Проведенные исследования позволяют сделать следующие выводы: 1) существует корреляция между выходным сигналом датчика потерь перемагничивания и магнитным состоянием контролируемого изделия, выражаемого в изменении магнитного потока и магнитного сопротивления; 2) показания интроскопа с датчиком потерь перемагничивания сильно зависят от величины воздушного зазора, что накладывает определенные требования к конструкции датчика и обработке сигнала в электронной схеме; 3) чувствительность датчика к дефектам больше на высших гармониках и анализ гармоник сигнала датчика является перспективным направлением в разработке средств неразрушающего контроля, основанных на измерении потерь перемагничивания. Литература 1 Вильданов Р. Г. Магнитный интроскоп для контроля оболочковых конструкций и трубопроводов // Контроль. Диагностика. 2003. № 5. С. 50 51. 1 Вильданов Р. Г. Магнитный интроскоп МД 11ПМ // Приборы и системы. Управление, контроль, диагностика. 2004. № 2. С. 50 52. 2 Вильданов Р. Г. Исследование датчика потерь //Измерительная техника. 2004. № 3. С. 31 – 33. Автор Дата Р. Г. Вильданов перемагничивания 11 Перечень подрисуночных надписей Рисунок 1- Датчик потерь перемагничивания: W1- число витков обмотки возбуждения; I1, U1- ток и напряжение обмотки возбуждения. Рисунок 2- Эквивалентная расчетная схема: UСЭ - падение магнитного потенциала в электромагните; UСИ - падение магнитного потенциала в изделии; RП1, RП2 магнитные сопротивления полюсов; RПЕР – магнитное сопротивление перемычки; RИ, R - магнитные сопротивления изделия и двух зазоров между изделием и полюсами; RF1 – магнитное сопротивление потоку рассеяния; М – магнитодвижущая сила обмотки возбуждения. Рисунок 3 – Зависимость магнитного потока датчика от магнитного сопротивления воздушного зазора. Рисунок 4 – Зависимость чувствительности датчика от магнитного сопротивления изделия. Рисунок 5 – Зависимость фазы сигнала датчика от магнитного сопротивления изделия. Рисунок 6 – Зависимость фазы сигнала датчика от магнитного сопротивления воздушного зазора. Рисунок 7 График зависимости высших гармоник от толщины металла: Н– толщина металла, мм; U–изменение выходного сигнала в процентах. Рисунок 8 Зависимость амплитуды выходного сигнала от величины воздушного зазора на частоте 25 Гц: Uвых– амплитуда выходного сигнала датчика потерь перемагничивания; S величина воздушного зазора. Рисунок 9 Зависимость фазы выходного сигнала датчика от величины воздушного зазора. φ приращение фазы выходного сигнала, S величина воздушного зазора. Рисунок 10 График зависимости выходного сигнала от объема дефекта. Рисунок 11 Конструкции датчиков с проволочным магнитопроводом. 12 АННОТАЦИЯ Описан датчик интроскоап для контроля поврежденного и напряженно– деформированного состояния металлоконструкций. Приведены результаты теоретических и экспериментальных исследований датчика интроскопа. Получено выражение фазовой чувствительности датчика потерь перемагничивания. SENSOR OF INTROSCOPE MD – 11 PM R. G. Vildanov The sensor of introscope for control of damaged and intensivli-deformed state of metal constructions is described. The results sensor’s of introscope theoretical and еxperimental researches are given here. The phasic sensitivity expresson of remagnetization loss sensor is obtained. Сведения об авторе: Вильданов Рауф Гибадуллович, кандидат технических наук, доцент Адрес: 453261, республика Башкортостан, г. Салават, ул. Бульвар Матросова, 4–5. Тел. дом. (34763) 5–15–54. Адрес рабочий: 453200, республика Башкортостан, г. Салават, ул. Губкина, 67. Филиал Уфимского государственного нефтяного технического университета в г. Салавате. Кафедра электрооборудования и автоматики промышленных предприятий. Тел. (34763) 3–08–50.