Программный комплекс для анализа свойств адаптивных
реклама

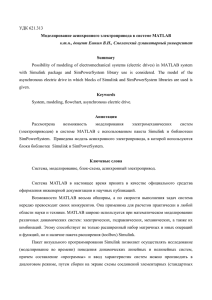
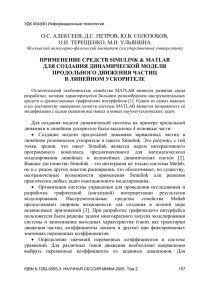
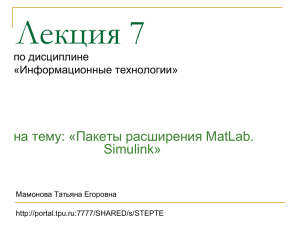
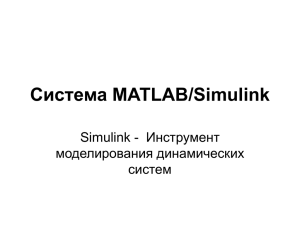
ДИНАМИЧЕСКАЯ МОДЕЛЬ АДАПТИВНЫХ РЕГУЛЯТОРОВ В СРЕДЕ SIMULINK MATLAB ДЛЯ ПРОВЕДЕНИЯ СРАВНИТЕЛЬНОГО АНАЛИЗА Д.М. Таскаев Томский политехнический университет, Томск, taskaev.dima@mail.ru Представлена динамическая модель, включающая в себя адаптивные регуляторы и классический регулятор. Модель реализована средствами Simulink MatLab. Позволяет проводить эксперименты для изучения адаптивных свойств регуляторов. Может быть использована как полноценный регулятор при применении специальных устройств ввода вывода. Технический прогресс в развитии промышленности и исследования в научной сфере поставили задачу создания автоматических систем управления исключительно высокой точности и минимальной сложности. Такие автоматические системы должны без участия оператора находить условия высокоэффективного протекания технологического и производственного процессов в данных условиях работы системы. Применение принципов оптимальности и адаптации в техники позволяет создавать наиболее совершенные автоматические системы. Но адаптивные системы при различных могут давать различные результаты, поэтому перед разработчиком встает проблема выбора наиболее эффективного метода адаптации при конкретных условиях. Задачу выбора можно решить динамическим моделированием в среде Simulink MatLab, позволяющим, моделируя работу адаптивных регуляторов, получить количественные и качественные характеристики для принятия решения о выборе соответствующего алгоритма. Рисунок 1 – Структурная схема модели в среде Simulink MatLab В общую исследовательскую модель адаптивных регуляторов вошли регуляторы, занимающие различные места в общей классификации адаптивных систем, а также стандартный классический ПИД- регулятор. В модели реализованы адаптивные регулятор с идентификатором и эталонной моделью. Это позволяет получать наиболее полные экспериментальные данные для проведения сравнительного анализа работы регуляторов. Общая структурная схема всей модели в среде Simulink MatLab представлена на рисунке 1. Расчёт оптимальных параметров ПИД- регулятора происходит автоматически формульным методом в зависимости от объекта управления и выбранного критерия оптимальности. При поиске оптимальных параметров пользователю предлагается выбрать один из следующих критериев оптимальности: апериодическое регулирование; регулирования с 20% перерегулированием; минимизация среднеквадратической ошибки. Результатом работы программы настройки является создание специального файла конфигурации, который передаёт все выбранные пользователем настройки в MatLab. Средствами Simulink Matlab реализована возможность визуализации графиков переходных процессов, а также расчёт параметров качества управления для всех регуляторов. В частности производится расчёт следующих величин: среднеквадратическая ошибка ε; время регулирования tпп; перерегулирование σ. Для вычисления этих параметров были разработаны специальные функциональные блоки на языке MatLab, в виду того, что в стандартных библиотеках Simulink такие блоки отсутствуют. Для анализа работы модели, произведем три опыта. В каждом из трех опытов модели автоматически рассчитает параметры качества управления. В качестве объекта управления возьмем апериодическое звено первого порядка с запаздыванием. Передаточная функция объекта управления представлена в виде: K0 W ( s) e t s (1) T0 s 1 При анализе работы системы, параметры объекта управления будут заданы следующим образом: Ko=10, To=1,5, t=1. В качестве критерия оптимальности для поиска параметров классического регулятора возьмём критерий 20% перерегулирование. Шаг модельного времени 0.03 сек., величина возмущающего ступенчатого воздействия – 2, уставка 50. Весь этап моделирования будит «разбит» на две части: 1) до воздействия возмущающего сигнала [0;tp1]; 2) после воздействия возмущающего сигнала [tB; tM]. Возмущающее воздействие в виде ступенчатого сигнала вводится в момент времени tB (tM – время моделирования). Количественные результаты в виде рассчитанных параметров качества управления сведены в таблице 1. Таблица 1 – Количественные результаты моделирования До помехи После помехи СКО, ε tпп, сек. σ, % СКО, ε tпп, сек. σ, % Регулятор 9.796 6.96 18.93 7.36 6.93 18.89 с идентификатором Классический 9.731 6.9 20.03 11.34 14.37 68.71 регулятор Регулятор 5.976 8.22 12.52 5.976 8.22 12.52 с эталонной моделью Качественные результаты моделирования в виде графиков переходных процессов для заданных начальных условий представлены на рисунке 2. Верхний график переходного процесса – результат управления регулятора с идентификацией, второй график – классическим регулятором, третий график – регулятора с эталонной моделью. В промежуток времени от 0 до tP1 – происходит идентификация объекта управления, при этом регулятор с эталонной моделью уже работает. В промежуток времени от tP1 до tB работают все три систему управления. В момент времени tB мы вручную ввели возмущающее воздействие, при этом отклонение выходной величины объекта управления превысило заданные 30% от установившегося значения, следовательно, объект отключится от контура регулирования и включит его в контур идентификации, после получения математической модели, объект включается в контур регулирование, это происходит в момент времени tP2. Рисунок 2 – Графики переходных процессов По результатам экспериментов были сделаны следующие выводы: 1) при управлении стационарным объектом целесообразней и дешевле использовать классический регулятор. 2) при управлении нестационарными объектами стоит применить адаптивную систему управления, для существенного повышения качества управления. Так как практически все объекты управления нестационарные, вследствие естественного старения оборудования и воздействия внешних факторов (температура, давление и др.) целесообразно во всех системах автоматического регулирования использовать адаптивные регуляторы. При необходимости программный комплекс легко можно дополнить другими моделями адаптивных регуляторов, тем самым, расширив полноту проводимых экспериментов. Следует отметить, что MatLab обладает средствами для работы с устройствами ввода- вывода, такими как АЦП, это даёт возможность подключать внешние (реальные) объекты управления и осуществлять регулирование в режиме реального времени.