М.В. БУРАКОВ ГЕНЕТИЧЕСКОЕ КОНСТРУИРОВАНИЕ НЕЙРОНЕЧЕТКИХ СИСТЕМ
реклама

ISBN 5-7262-0634-7. НЕЙРОИНФОРМАТИКА – 2006. Часть 3
М.В. БУРАКОВ
Санкт-Петербургский государственный
университет аэрокосмического приборостроения
bmv@aanet.ru
ГЕНЕТИЧЕСКОЕ КОНСТРУИРОВАНИЕ
НЕЙРОНЕЧЕТКИХ СИСТЕМ
Аннотация
В докладе рассматриваются особенности использования генетического
алгоритма при настройке нейронечетких регуляторов для управления динамическими объектами.
Генетический алгоритм (ГА) является предметно независимым инструментом глобальной оптимизации, эффективность которого хорошо
известна и для решения задач параметрической настройки нейронных
сетей (НС) ([1 – 4] и др.).
Использование ГА предполагает, что параметры НС (обычно это веса
межнейронных связей) кодируются цепочкой битов – хромосомой.
Совокупность хромосом образует популяцию. Первоначальная генерация популяции осуществляется случайным образом в исследуемой области решений. После этого начинается циклическая работа ГА. На первом
шаге происходит тестирование всех по очереди хромосом популяции, после чего каждая хромосома получает фиксированный на данном шаге
признак – относительную пригодность (ОП) (англ. fitness function). В соответствии с выбранной стратегией хромосомы копируются в будущую
популяцию на основании своих значений ОП.
Операция отбора (копирования) является первой генетической операцией. Затем используются генетические операторы скрещивания и мутации. Как известно, операция скрещивания позволяет выйти на субоптимальное решение в рамках некоторой достаточно ограниченной области
поиска, в то время как операция мутации позволяет выполнять пробные
шаги в разных точках всего пространства поиска.
Существует достаточно большое количество исследований, посвященных вариантам выполнения операций отбора, скрещивания и мутации.
Однако очевидно, что эффективная работа ГА невозможна без правильного расчета ОП хромосом. Во многих практических задачах такая проблема
не возникает, но в задаче генетического обучения нейронного регулятора
(НР) она может иметь критическое значение [5].
УДК 004.032.26(06) Нейронные сети
43
ISBN 5-7262-0634-7. НЕЙРОИНФОРМАТИКА – 2006. Часть 3
Использование ГА при синтезе НР предполагает, что каждому варианту параметров НР соответствует своя хромосома. Для оценки ОП i-й хромосомы необходимо знать, какой переходный процесс Xi(t) ей соответствует. При обычном размере популяции в сотни и тысячи хромосом требуется очень большое количество экспериментов, что делает необходимым использование имитационной модели (ИМ) объекта. При этом возникает две фундаментальные проблемы:
ИМ должна быть достаточно быстрой, иначе нехватка вычислительных ресурсов дискредитирует использование ГА;
при расчете ОП хромосом нужно учитывать неизбежное неполное
несоответствие ИМ и объекта.
Эти проблемы взаимосвязаны, потому что чем точнее описание объекта, тем меньше быстродействие модели и наоборот. Проблема неполного
соответствия объекта и модели будет возникать, естественно, и при
управлении в реальном времени.
Основоположник теории нечетких множеств Л. Заде подчеркивал, что
требования к точности описания объекта управления могут быть снижены
за счет повышения интеллектуальности системы управления [6]. Нечеткие
регуляторы являются примером подобного подхода. Однако генетическое
обучение классических нечетких регуляторов сопряжено с некоторыми
проблемами, которых нет при обучении НР (см. [5]).
Учитывая сделанные замечания, совершенно естественным представляется переход от НР к нейронечеткому регулятору (ННР). В ННР один
нейрон используется для представления одного нечеткого правила. Пусть
нечеткое правило имеет вид:
Если (x1=w1*)и(x2=w2*)и…(xn=wn*), то u=v1*,
где w1*, w2* ,…wn* – термы лингвистических переменных (ЛП), описывающих посылки правила, v* – терм ЛП заключения.
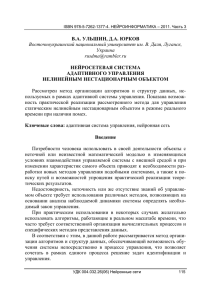
Если использовать для представления термов гауссову функцию (ГФ),
то правило можно представить как нейрон с n входами (рис. 1).
Входные сигналы xi преобразуются в нечеткую форму, образуя центры
ГФ, описывающих функции принадлежности μi(x):
1
2
xi x ,
2
i ( x) exp
(1)
где параметр β отвечает за ширину «окна» ГФ.
УДК 004.032.26(06) Нейронные сети
44
ISBN 5-7262-0634-7. НЕЙРОИНФОРМАТИКА – 2006. Часть 3
x1
w1*
x1*
α1
w1
x2
w2*
x2*
w2
xn
xn*
u*
αmin
α2
αmin,
u*
v
wn* αn
wn
Рис. 1. Нейронное представление нечеткого правила
Аналогично преобразуются в нечеткую форму веса wi и v.
Степень соответствия посылки и заключения описывается формулой:
i sup xi* wi* .
(2)
x
НС для реализации ННР должна быть двухслойной, задача второго
слоя заключается в выполнении функции дефаззификации – вычисления
совместного действия всех правил [7].
Если считать, что ширина ГФ β не меняется в процессе обучения, то
НС на рис. 1 описывается таким же набором параметров, что и обычная
НС прямого распространения: wi соответствуют весу входа, а v – параметр
активационной функции. Второй слой в процессе обучения не участвует,
поэтому можно сказать, что хромосома имеет одинаковый вид при генетическом обучении как НР, так и ННР.
Основное преимущество использования ННР по отношению к НР заключается в том, что ННР сохраняет такие полезные свойства нечеткого
регулятора как естественную адаптивность и слабую чувствительность к
помехам. Степень запуска правила αmin зависит от сходства ситуации поУДК 004.032.26(06) Нейронные сети
45
ISBN 5-7262-0634-7. НЕЙРОИНФОРМАТИКА – 2006. Часть 3
ступившей от объекта – {x1, x2, …xn} и эталонной ситуации {w1, w2, … wn}.
Изменяя β, можно обобщать или, наоборот, конкретизировать условия
срабатывания правил.
При генетическом обучении ННР возникает сходная задача оценки
сходства эталонной и реальной траекторий с целью определения ОП хромосомы. Нечеткое описание и здесь может быть использовано для построения простого и эффективного алгоритма оценки ОП.
Рассмотрим задачу обучения НР (или ННР) подробнее. В простейшем
случае, когда объект управления одномерный, имеется эталонный переходный процесс Z(t), описывающий реакцию на типовое входное воздействие, и заданный совокупностью точек, соответствующих n моментам
времени: z1, z2, … zn.
НР включается в цепь обратной связи по ошибке управления. Если параметры НР выбраны правильно, то реальный переходный процесс X(t),
заданный точками x1, x2, … xn , будет с достаточной степенью точности
соответствовать Z(t):
n
z
i 1
i
xi ,
где ε – малая величина.
Однако при генетическом обучении НР количественные оценки, основанные только на использовании функций расстояния, малоэффективны.
Известно, что задача вычисления сходства кривых на плоскости требует
анализа их качественного соответствия [9]. На начальной стадии обучения
все хромосомы могут быть одинаково далеки от оптимума.
Рассмотрим, как могут быть построены нечеткие оценки ОП хромосом. Основная идея предлагаемого подхода заключается в переходе из
пространства состояний объекта в нечеткое фазовое пространство.
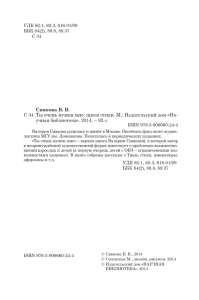
Преобразуем каждое значение xj в нечеткое число. Для этого можно,
следуя рис. 1, рассматривать xj как центр ГФ, определяющей функцию
принадлежности (рис. 2, где Ti(x) – функция принадлежности).
Совокупность xi* может рассматриваться в качестве термов лингвистической переменной (ЛП) Li с названием, соответствующим координате x:
Tz(Li)={ zi*, zi*,… zi*}
Ti(x
)
1
УДК 004.032.26(06)
xn-1* x3* Нейронные
x1* xn*сети
x2*
46
ISBN 5-7262-0634-7. НЕЙРОИНФОРМАТИКА – 2006. Часть 3
Рис. 2. Фаззификация выхода модели
Таким же образом можно построить ЛП, описывающую эталонный
процесс:
Tx(Li)={ xi*, xi*,… xi*}
Степень сходства этих двух ЛП можно оценить формулой, аналогичной формуле расчета уровня активации нечеткого правила (2):
1 min sup xi* zi* .
i
x
(3)
Если объект имеет k выходных координат, то формула (3) обобщается:
min j ,
j
j 1, k .
(4)
И тогда эта величина может быть использована в качестве значения
ОП хромосомы.
Таким образом, ОП хромосомы изменяется в пределах от 0 до 1. Значение 0 означает полное несоответствие, а значение 1 – полное соответствие реальной и желаемой траектории.
В соответствии с (1), изменяя β можно менять чувствительность ОП –
чем больше значение этого параметра, тем больше хромосом могут иметь
высокие оценки ОП. В начале процесса обучения можно устанавливать
большое значение β, позволяя многим хромосомам участвовать в отборе.
По мере развития популяции можно постепенно уменьшать β. Можно
УДК 004.032.26(06) Нейронные сети
47
ISBN 5-7262-0634-7. НЕЙРОИНФОРМАТИКА – 2006. Часть 3
также рассматривать нечеткое сходство для приращений Δx1, Δx2,… Δxn и
Δz1, Δz2,… Δzn.
Нечеткие оценки ОП призваны направлять генетический поиск в перспективные области пространства параметров. Если все хромосомы имеют в соответствии с (4) нулевое значение ОП, то использовать количественные оценки и генетические операции бессмысленно – лучше выполнить новую инициализацию популяции.
Симбиоз НС и нечетких правил обычно обосновывается тем, что поведение НС получает в этом случае семантическое описание, а нечеткая система становится способной к обучению. Однако, еще одно, возможно –
более важное, достоинство ННР заключается в возможности учитывать
неопределенность, возникающую при сравнении эталонных ситуаций и
реального поведения объекта управления. Такая же неопределенность
должна быть учтена и при генетическом обучении ННР.
Описанные подходы к организации генетического обучения НР и ННР
были апробированы при исследовании процессов управления реальными
сложными объектами [9 – 11].
Список литературы
1. Holland J. Adaptation in Natural and Artificial Systems: An Introductory Analysis with
application to Biology, Control and Artificial Intelligence. - University of Michigan Press, 1975.
2. Goldberg D.E. Genetic Algorithms in Search, Optimization and Machine Learning. Addison-Wesley, Reading, MA. 1989.
3. Скурихин А.Н. Генетические алгоритмы // Новости искусственного интеллекта, №4,
1995. С. 6-46.
4. Бураков М.В. Синтез нейронного регулятора // Изв. Академии наук. Теория и системы управления, 1999, №3. С. 140-145.
5. Бураков М.В., Коновалов А.С. Проектирование нейронных и нечетких регуляторов с
помощью генетического алгоритма //В кн. Управление в условиях неопределенности. Под
ред. Городецкого А.Е. / С.–Петербург, издательство СПбГТУ, 2002, 399 с.
6. Zadeh L.A. The Concept of a Linguistic Variable and Its Application to Approximate Reasoning, Information Sciences, Part 1, 8 (1975), 199-249; Part 2, 8 (1975), 301-357; Part 3 8 (1975),
43-80.
7. Gupta M.M., Rao D.H. On the principles of fuzzy neural networks // Fuzzy Sets and Systems, vol. 61, 1984, p. 1-18.
8. R.O. Duda, P.E. Hart. Pattern classification and scene analysis. New York, 1973.
9. Бураков М.В., Коновалов А.С. Нейронечеткие системы управления // Информационно-управляющие системы, №1, 2002г., с. 2-7.
10. Бураков М.В. Структура нейронечеткого регулятора // Изв. Академии наук. Теория и
системы управления, 2001, №6. с. 160-165.
11. Бураков М.В., Коновалов А.С., Шумилов П.Е. Интеллектуальные системы авиационной антиюзовой автоматики. СПб: Изд-во политехнического университета, 2005. 242 с.
УДК 004.032.26(06) Нейронные сети
48