На правах рукописи ПРОТАЛИНСКИЙ ИГОРЬ ОЛЕГОВИЧ
реклама

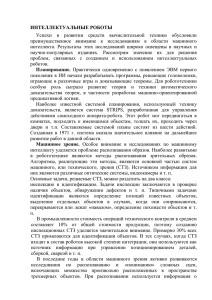
На правах рукописи ПРОТАЛИНСКИЙ ИГОРЬ ОЛЕГОВИЧ МОДЕЛИ И АЛГОРИТМЫ УПРАВЛЕНИЯ ГРУППОЙ МОБИЛЬНЫХ РОБОТОВ 05.13.01 – Системный анализ, обработка информации и управление (в технической отрасли) АВТОРЕФЕРАТ диссертации на соискание ученой степени кандидата технических наук Саратов 2013 2 Работа выполнена в Федеральном государственном бюджетном образовательном учреждении высшего профессионального образования «Астраханский государственный технический университет» Научный руководитель: кандидат технических наук, доцент, Щербатов Иван Александрович Официальные оппоненты: Литовка Юрий Владимирович, доктор технических наук, профессор, ФГБОУ ВПО «Тамбовский государственный технический университет», профессор кафедры «Системы автоматизированного проектирования» Петров Дмитрий Юрьевич, кандидат технических наук, доцент, Институт проблем точной механики и управления РАН (г. Саратов), старший научный сотрудник лаборатории «Системные проблемы управления и автоматизации» Ведущая организация: ФГБОУ ВПО «Волгоградский государственный технический университет» Защита состоится 19 декабря 2013 г. в 14.00 часов на заседании диссертационного совета Д 212.242.04 при ФГБОУ ВПО «Саратовский государственный технический университет им. Гагарина Ю.А.» по адресу: 410054, г. Саратов, ул. Политехническая, 77, ФГБОУ ВПО «Саратовский государственный технический университет им. Гагарина Ю.А.», ауд 1/414. С диссертацией можно ознакомиться в научно-технической библиотеке ФГБОУ ВПО «Саратовский государственный технический университет им. Гагарина Ю.А.». Автореферат разослан « » ноября 2013 года Ученый секретарь диссертационного совета В.В. 3 Алешкин ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ Актуальность темы. В настоящее время направление развития робототехники характеризуется расширением области применения мобильных роботов в промышленности, бытовой и социальной сфере. Количество роботов за период 2008-2011 гг. возросло более чем в два раза – с 8,6 до 18,2 млн. Однако аналитики прогнозируют, что в ближайшее время рост спроса на робототехнические комплексы бытового назначения резко замедлится из-за неэффективности решения комплексных задач одним устройством. Аналогичная тенденция характеризует сферу промышленной робототехники и проявляется в снижении количества в мире роботовманипуляторов за период 2010-2012 гг. с 1,1. до 1 млн. Расширение области применения роботов в промышленной, бытовой и социальной сферах приводит к необходимости использования групп мобильных роботов для решения комплексных задач. Группа роботов является сложной системой, при этом эффективность выполнения ею задач характеризуется двумя основными техникоэкономическими показателями: скорость выполнения задачи и затраченные на это ресурсы, которые определяются качеством управления группой мобильных роботов. Основные результаты исследований в области группового управления роботами содержатся в работах российских: Юревич Е.И., Каляев И.А., Капустян С.Г., Занкевич С.Л., а так же зарубежных ученых Brumitt B.L.Funato D.,Conn, N.R., Stenz A., Dias M.B.,Papanikolopoulos, N., Yamaguchi H, Marchant G. В настоящее время разработан ряд методов и алгоритмов реализации управления группой роботов в стационарных условиях. Однако эти решения не могут быть использованы при взаимосвязи между задачами изза их сложной сетевой структуры. Взаимосвязь задач определяется условием возможности выполнения последующей при достижении цели предыдущей. Это обусловливает актуальность темы исследования, которое соответствует приоритетным направлениям развития науки, технологий и техники РФ («Информационно-телекоммуникационные системы»), и критическим технологиям («Технологии распределенных вычислений и систем»). Целью работы является повышение эффективности управления одноранговой группой мобильных роботов при решении взаимосвязанных задач. Для достижения поставленной цели требуется решить следующие задачи: разработать методику построения математической модели рабочей зоны группы мобильных роботов с учетом взаимодействия задач; построить математическую модель группы роботов и множества задач с сетевой структурой на основе предложенной методики; 4 синтезировать алгоритм группового управления роботами для решения множества взаимосвязанных задач в единой рабочей зоне; реализовать систему управления группой мобильных роботов при решении множества задач с сетевой структурой; построить физическую модель группы мобильных роботов для проведения экспериментальных исследований, а так же для проверки адекватности математической модели и работоспособности алгоритмов; провести анализ и оценить результативность и эффективности предложенных моделей и алгоритмов управления группой мобильных роботов. Объект исследования: децентрализованная группа мобильных роботов. Предмет исследования: модели и алгоритмы управления одноранговой группой мобильных роботов. Методы исследования: Методы системного анализа, теории управления и многоагентных систем, математического моделирования, методы оптимизации. Научная новизна работы: создана методика построения математической модели рабочей зоны группы мобильных роботов, описывающая задачи и роботов в единой многоагентной среде, отличающаяся учетом взаимосвязей между задачами, что позволяет определить эффективность их выполнения; разработан алгоритм поиска Парето-оптимального управления, отличающийся использованием метода справедливых компромиссов, позволяющий синтезировать стратегию выполнения группой мобильных роботов множества задач с сетевой структурой; предложена распределенная архитектура системы управления группой мобильных роботов, отличающаяся координацией работы роботов на основе обмена информационными сообщениями, позволяющая определить управляющее воздействия для решения задач с иерархической структурой. Практическая ценность работы: реализована программа построения математической модели рабочей зоны группы мобильных роботов, позволяющая определить эффективность выполнения взаимосвязанных задач каждым из роботов группы; создано программное обеспечение системы управления децентрализованной одноранговой группой мобильных роботов, позволяющая повысить эффективность решения множества взаимосвязанных задач [11]; разработана физическая модель, состоящая из трех мобильных роботов, позволяющая проводить экспериментальные исследования для проверки адекватности математической модели и работоспособности алгоритмов. На защиту выносятся: методика построения математической модели рабочей зоны группы роботов, учитывающая взаимосвязь между поставленными задачами; математическая модель рабочей зоны группы роботов; алгоритм поиска Парето-оптимального управления группы мобильных роботов для решения взаимосвязанных задач; 5 система управления одноранговой группой мобильных роботов для решения множества взаимосвязанных задач. результаты исследования эффективности и результативности предложенных моделей и алгоритмов. Достоверность и обоснованность результатов диссертационного исследования подтверждается корректным использованием математических методов, компьютерным моделированием, проверкой адекватности модели, результатами физического моделирования, соответствием основных теоретических положений и выводов практическим результатам, полученным на основе разработанных моделей. Апробация работы. Основные результаты работы обсуждались на Международных научно-технических конференциях: «Математические методы в технике и технологиях» (Саратов, 2010; Харьков, 2012, Нижний Новгород, 2013); «International congress on information technologies-2012» (Саратов, 2012), «Наука вчера, сегодня, завтра» (Новосибирск, 2013). Исследования поддержаны Фондом содействия развитию малых форм предприятий в научно-технической сфере по программе «СТАРТ» (2012 гг.). Сконструированные в рамках исследования роботы принимали участие во Всероссийских соревнованиях «Робофест-2011/2012/2013», на которых заняли призовые места и победили в конкурсе «National Instruments». Публикации. Основные результаты диссертационной работы изложены в 11 публикациях, в том числе 3 статьях в центральных научнотехнических журналах, рекомендуемых ВАК РФ, 1 статья в научнотехническом журнале, аккредитованном в системе рецензирования «Scopus», в 5 трудах Международных научных конференций, получено 1 свидетельство об официальной регистрации программы для ЭВМ. Без соавторства опубликовано 2 работы. Структура и объем работы. Диссертационная работа состоит из введения, 4 глав, выводов и списка литературы. Основная часть работы изложена на 111 страницах, содержит 33 рисунка, 6 таблиц, список литературы, состоящий из 118 наименований публикаций отечественных и зарубежных авторов, и приложения. СОДЕРЖАНИЕ РАБОТЫ Во введении обоснована актуальность работы, сформулированы цель и задачи исследования, научная новизна и практические результаты. В первой главе приведена классификация задач, решаемых с применением групп роботов, описан процесс их управления, показана необходимость применения методов, оптимизации, приведена теоретикомножественная модель задач с сетевой структурой. Анализ известных систем управления групп мобильных роботов показал, что достаточно хорошо разработаны и реализованы принципы синтеза управляющего воздействия для роботов с одинаковой конструкцией, выполняющих множество задач, задаваемое последовательным вводом оператора новых при выполнении роботами заданных или единовременным множеством автономных задач. Эти системы могут предусматривать достаточ6 но сложное коллективное поведение роботов внутри группы, включающее возможность диалога для выбора исполнителя или кооперацию для совместного выполнения одной задачи. Однако ни одна из систем не учитывает взаимосвязи между задачами, что исключает возможность выполнения многокомпонентных задач с сетевой структурой. Поэтому сделан вывод о целесообразности разработки алгоритмов управления группой мобильных роботов для решения взаимосвязанных задач. Проведен обзор методов управления децентрализованной группой роботов на основе их классификации: автоматные модели, многоагентные системы, роевые алгоритмы, имитационные модели и эволюционные алгоритмы. Критериями выбора метода управления являются координация общей стратегии группы, а так же индивидуальных тактик роботов, совместное использование различных типов роботов. На основе проведенного анализа сделан вывод о целесообразности разработки аппарата поиска управления группой мобильных роботов на основе многоагентных систем. Поставлена задача исследования: для группы роботов R необходимо выбрать управляющее воздействие-стратегию, для распределения множества взаимосвязанных задач Z, обладающих ценностью P, обеспечивающих максимум функционала Q за время tG: (1) Таким образом, отличительная особенность исследования – синтез управляющего воздействия для решения взаимосвязанных задач группой роботов. В рамках исследования определен класс решаемых задач введением системы ограничений: группа роботов функционирует в стационарных условиях; на площади рабочей зоны отсутствуют динамические препятствия, такт управления – время, в течение которого состав группы постоянен (изменение состава осуществляется при неисправности робота, снижение заряда батарей робота), при управлении рассматривается стратегический уровень (построение траектории, объезд препятствий не рассматриваются), «цена» задачи задается оператором. Вторая глава посвящена разработке методике построения математической модели рабочей зоны группы мобильных роботов, учитывающей: роботов группы R, задачи множества Z и взаимосвязи между компонентами модели. Задачи представлены агентами-акторами, которые могут изменять только собственное состояние, а роботы группы - агентами, которые способны изменить как собственное состояние, так и других агентов. Методика построения математической модели рабочей зоны группы мобильных роботов (рис. 1) осуществляет формирование агента-актора, задаваемого табличной формой, и агента, описываемого в аналитическом ви7 де, на основе входной количественной и качественной информации, вводимой оператором и данных, поступающих от датчиков роботов. При этом синтезируется математическое описание взаимосвязей задач в вербальной форме с использованием атрибута «Имя». Рис. 1. Структурная схема методики построения математической модели рабочей зоны группы мобильных роботов Значения атрибутов определяются на основе фреймовой модели (рис. 2). ЗАДАЧА ИМЯ ЗАДАЧИ МЕСТОПОЛОЖЕНИЕ ИМЯ ЗАДАЧИ ЦЕНА Z P j ЦЕНА ПРЕДОК/ ИЗМЕНЕНИЕ СОСТОЯНИЕ ПОТОМОК МЕСТОПОЛОЖЕНИЯ СОСТОЯНИЕ Q j ПРЕДОК/ПОТОМОК L ПРОДУКЦИОННОЕ ИМЯ ПРАВИЛО j ФУНКЦИЯ ИЗМЕНЕНИЯ КООРДИНАТЫ Y ФУНКЦИЯ ПРОДУКЦИОННОЕ Y ПРАВИЛО j ФУНКЦИЯ Х ФУНКЦИЯ Y f (L (x)) f (L (y)) j ДЕМОН ФУНКЦИИ ЭНЕРГОЕМКОСТИ ФУНКЦИЯ ВРЕМЕНИ ФУНКЦИЯ ПРОДУКЦИОННОЕ Х ПРАВИЛО L ОПИСАНИЕ ФУНКЦИЯ ФУНКЦИЯ ПРОДУКЦИОННОЕ X Y ПРАВИЛО ФУНКЦИЯ ИЗМЕНЕНИЯ КООРДИНАТЫ Х j ЭНЕРГОЕМКОСТЬ ИЗМЕНЕНИЕ МЕСТОПОЛОЖЕНИЯ ДЕМОН ФУНКЦИИ ОПИСАНИЕ ИЗМЕНЕНИЯ МЕСТОПОЛОЖЕНИЯ ФУНКЦИЯ ИЗМЕНЕНИЯ МЕСТОПОЛОЖЕНИЯ ФУНКЦИЯ ФУНКЦИЯ ИЗМЕНЕНИЯ ПО ИЗМЕНЕНИЯ ПО КООРДИНАТЕ Х КООРДИНАТЕ Y L ИЗМЕНЕНИЕ ЭНЕРГОЕМКОСТИ ВРЕМЯ ВЫПОЛНЕНИЯ ДЕМОН ОПИСАНИЕ ФУНКЦИИ ВРЕМЕНИ j МЕСТОПОЛОЖЕНИЕ ВРЕМЯ ВЫПОЛНЕНИЯ j ФУНКЦИЯ ЭНЕРГОЕМКОСТИ ФУНКЦИЯ ЭНЕРГОЗАРЯД ФУНКЦИЯ ВРЕМЕНИ ФУНКЦИЯ ЭНЕРГОЗАРЯД f ( j ) Рис. 2. Фреймовая модель атрибутов агента-актора 8 ПРОДУКЦИОННОЕ ПРАВИЛО Синтезирована структура многокомпонентной математической модели рабочей зоны, где каждый из агентов-акторов характеризуется следующими атрибутами: «Цена», «Время выполнения», «Местоположение», «Изменение местоположения робота при выполнении задачи» «Состоя- ние», / «Изменение энергоемкости при выполнении задачи», «Пре- док/Потомок». Агент, описывающий математическую модель робота, обладает следующим набором атрибутов: «Местоположение», «Расчетное местоположение», «Целевое местоположение», движения», «Энергоемкость», «Расчетная энергоемкость» «Скорость», «Направление «Минимальная энергоемкость», «Целевая энергоемкость», «Состояние». Структура математической модели агента, описывающего робота, имеет вид (2) где R – радиус колеса (табличное значение), n – количество импульсов энкодера за период , N-количество импульсов энкодера за один оборот колеса (табличное значение); l – осевое расстояние между колес; скорость перемещения робота; от колесной оси робота, , описывает угол отклонения вектора скорости – начальные координаты робота; динаты агента-робота в момент времени ряда; описывает ; – коор- описывает изменение энергоза- – фиксированный момент времени расчета характеристик робота. Для определения эффективности выполнения множества задач роботами используется математическая модель, для этого введена функция «робот – задача» , учитывающая затраты энергоемкости на передвижение i-го робота к j-й задаче (3), и функция «робот – задача – робот из группы» , оценивающее расстояние между i-й задачей j-го робота и положением v-гo робота из группы для возможности рассредоточения роботов по рабочей зоне (4). 9 (3) (4) где расстояние от местоположения j-го задачи, описанного атрибутом «Целевое местоположение», до местоположения i-го робота, описанного атрибутом «Местоположение»; – скорость i-го робота; – энергозаряд, потраченный на достижение j-й задачи; – энергозаряд робота; – расстояние от местоположения j-й задачи, описанной атрибутом актора (Местоположение) до местоположения i-го робота, описанного аспектом агента (Исходное местоположение) v-гo робота из группы; – кратчайшее значение расстояния . Рис. 3. Оценка адекватности модели робота 1 – экспериментальная; 2 – рассчитанная по модели В соответствии с предложенной методикой построена математическая модель рабочей зоны группы из трех роботов (M = 3) с различными техническими характеристиками, перед которыми ставится задача объезда тридцати базисных точек (N = 30), расположенных в общей рабочей зоне. Геометрический размер рабочей зоны: 10-50 метров. Для проверки адекватности построенной математической модели построена физическая модель. Адекватность модели оценивается традиционными методами с использова10 нием критерия Фишера по выходной координате (уровень энергозаряда робота). Результат проверки – значение критерия Фишера F = 3,61, при табличном значении при уровне значимости , что свидетельствует об адекватности модели. Средняя квадратичная относительная ошибка расчетов по модели не превышает , максимальная относительная ошибка – 1,6%. Максимальная относительная ошибка расчетов по модели энергоемкости батареи робота – 1%. В третьей главе разработан алгоритм управления группой мобильных роботов для решения множества взаимосвязанных задач с использованием многокомпонентной математической модели рабочей зоны на основе многокритериальной оптимизации. Для учета эффективности выполнения задач при синтезе управления группой роботов, введен новый критерий выбора j-ой задачи i-ым роботом: мощность ). С учетом эффективности конкретизируем задачу: для группы мобильных роботов R необходимо выбрать такую стратегию : , что каждый робот выполняет максимально по стратегии мощную задачу на дискретном отрезке времени : ; ; (5) ; Задача (5) решена на основе математического аппарата многокритериальной оптимизации. Анализ методов многокритериальной оптимизации выявил, целесообразность использования метода справедливых компромиссов для поиска Парето-оптимального множества стратегий, набора стратегий с максимальной суммарной мощностью W. Введена мера относительного изменения мощности стратегий для каждого k-ого робота группы R при переходе от множества стратегий к : (6) 11 где абсолютное изменение значений суммарной мощности стратегий при переходе от множества страте- гий к . Суммарное снижение мощности для группы роботов при переходе от множества стратегий к множеству определяется как (7) где n – количество роботов в группе R. Множество стратегий для группы роботов эффективнее множества , если выполняется условие: . (8) При выполнении условия (7) происходит переход от выполнения группой роботов R множества стратегий к выполнению множества . Для синтеза Парето-оптимального управления определены ограничения: время существования группы роботов R без изменений в составе и плотность распределения роботов в рабочей зоне, среднее значение функции эффективности «робот – цель – робот из группы» (4) для каждого из роботов. Для синтеза стратегий выполнения множества взаимосвязанных задач формируется эстетивное дерево для каждого из роботов глубиной, ограниченной значением времени , на основе которого эвристическим алгоритмом определяется стратегия по максимально-мощным задачам. На основе метода справедливых компромиссов разработан алгоритм поиска Парето-оптимального управления (рис. 4). 12 НАЧАЛО ФОРМИРОВАНИЕ МНОЖЕСТВА СТРАТЕГИЙ 1 НАХОЖДЕНИЕ МАКСИМАЛЬНО МОЩНОЙ СТРАТЕГИИ 2 ОТПРАВКА СООБЩЕНИЯ О ВЫБРАННОЙ СТРАТЕГИИ ПРИЕМ СООБЩЕНИЯ ОТ ГРУППЫ РОБОТОВ 12 ИСКЛЮЧЕНИЕ ЗАДАЧ СТРАТЕГИИ ИЗ МАССИВА ИСКЛЮЧЕНИЙ 17 НЕТ ДА 3 ПРИЕМ СООБЩЕНИЯ ОТ ГРУППЫ РОБОТОВ 4 ИСКЛЮЧЕНИЕ СЛУЧАЙНОЙ СТРАТЕГИИ СОХРАНЕНИЕ МНОЖЕСТВА СТРАТЕГИЙ 16 14 нет НЕТ ПОЛУЧЕННЫ СООБЩЕНИЯ ОТ ВСЕХ РОБОТОВ? 5 8 да РАНЖИРОВАНИЕ ВЫБРАННЫХ СТРАТЕГИЙ 6 НЕТ НЕТ ЕСТЬ АЛЬТЕРНАТИВНОЕ МНОЖЕСТВО 15 ПРОВЕРКА ПО МЕТОДУ СПРАВЕДЛИВЫХ КОМПРОМИССОВ 18 ДА СООБЩЕНИЕ ОБ ИЗМЕНЕНИИ МАССИВА ИСКЛЮЧЕНИЯ ВСЕ РОБОТЫ ГРУППЫ ВЫБРАЛИ СТРАТЕГИИ? 13 СТРАТЕГИЯ РОБОТА МАКСИМАЛЬНО МОЩНАЯ? 7 ОПТИМАЛЬНОЕ МНОЖЕСТВО ИЗМЕНИЛОСЬ? 19 ДА ОБНОВЛЕНИЕ СЧЕТЧИКА ВЫБОРКИ ДА ОБНУЛЕНИЕ СЧЕТЧИКА ВЫБОРКИ 21 20 ПРИЕМ СООБЩЕНИЯ ОТ РОБОТОВ ГРУППЫ 9 СЧЕТЧИК ВЫБОРКИ ДОСТИГ МАКСИМУМА 22 НЕТ СТРАТЕГИЯ УДОВЛЕТВОРЯЕТ КРИТЕРИЮ ОПТИМАЛЬНОСТИ? 10 НЕТ ДА ОТПРАВКА СООБЩЕНИЯ ОБ ОПТИМАЛЬНОЙ СТРАТЕГИИ 23 ДА ОТПРАВКА СООБЩЕНИЯ О МАССИВА ИСКЛЮЧЕНИЙ 11 КОНЕЦ Рис. 4. Алгоритм поиска Парето-оптимального управления Разработана архитектура системы управления, позволяющая группе роботов организовать процесс поиска управления на основе обмена информацией для выполнения множества взаимосвязанных задач (рис. 5). 13 Рис. 5. Архитектура системы управления группой мобильных роботов Предложенная архитектура включает два уровня: тактическое и стратегическое управление. На тактическом уровне вычисляются траектории движения робота, определяется управление исполнительными механизмами и обрабатывается сенсорная информация. На стратегическом – осуществляется координация работы робота внутри группы и построение стратегии. Реализация предложенной архитектуры позволяет объединить автономные роботы в одноранговую децентрализованную группу, выполнить координацию работы группы роботов; реализовать управление каждым из роботов в ручном режиме оператором; вводить информацию о задачах оператором, обмениваться информацией между роботами, формировать Парето-оптимальное управление, а так же контролировать проведение работ оператором. В четвертой главе представлена реализация системы управления группой мобильных роботов для решения множества взаимосвязанных задач Z. В рамках исследования спроектирована и разработана группа из трех мобильных роботов с однотипной архитектурой вычислительной системы роботов, используемой как физическая модель, для определения работоспособности и эффективности предложенных алгоритмов. На основе физической модели и вычислительного эксперимента с использованием математической модели выполнена оценка работоспособности и эффективности алгоритма поиска Парето-оптимального управления группой мобильных роботов, на основе патрулирования тридцать базисных точек (N = 30) рабочей зоны тремя роботами (M = 3). Цель первого ряда экспериментов – сравнение алгоритма поиска Паретооптимального управления с методом ускоренного улучшения плана. Критерий сравнения методов - время построения плана выполнения множества задач. В рамках первого ряда экспериментов проведены два типа эксперимента. Первый направлен на определение изменения времени поиска управления от 14 количества роботов:100 экспериментов, при этом количество роботов в группе изменялось M , при N = 200 задач (рис. 6). Рис. 6. Зависимость времени синтеза управления от количества роботов 1- алгоритм поиска Парето-оптимального управления; 2- алгоритм ускоренного улучшения плана Второй тип эксперимента – определение времени поиска управления от количества задач в множестве: 100 экспериментов моделирований, при которых количество роботов в группе изменялось , при M = 10 роботов (рис. 7). Рис. 7. Зависимость времени синтеза управления от количества задач 1- алгоритм поиска Парето-оптимального управления; 2- алгоритм ускоренного улучшения плана На основе экспериментов определен диапазон эффективного использования алгоритмов отношения робот/задачи, который принадлежит промежутку . Второй ряд экспериментов заключался в сравнении алгоритма поиска Парето-оптимального управления группой роботов и ручного управления на основе физической модели. Критерий сравнения – время выполнения фиксированного количества задач. В рамках второго ряда экспериментов также проведены два типа эксперимента. Первый – в режиме ручного управления операторы не согласовывали действия: 10 экспериментов, при которых количество роботов в группе M = 3, количество задач ; второй – в согласованных действиях операторов при управлении роботами. Условия идентичны с предыдущим. 15 На основе проведенных экспериментов определено, что эффективность при автоматическом управлении повышается на 4% для каждой из задач. Третий ряд экспериментов заключался в проверке диапазона возможного применения предложенного алгоритма поиска Паретооптимального множества стратегий для группы мобильных роботов на основе математической модели. Рис. 8. Зависимость времени выполнения задач от типа управления 1 – несогласованное ручное управление; 2 – согласованное ручное управление; 3 – алгоритм Парето-оптимального управления Изменялось количество роботов , выполняющих задачу обхода, N = 400 задач. В качестве критерия работоспособности принято процентное соотношение сообщений, потерянных при взаимодействии к общему количеству передаваемых сообщений: предельное значение – 2% (рис. 9). Рис. 9. Зависимость процента потерянных сообщений от количества роботов В результате эксперимента предельное значение соотношения потерянных сообщений к общему количеству достигается при M = 13 роботах в группе, т.е. алгоритм поиска Парето-оптимального множества стратегий корректно работает на группе до 12 роботов. В заключении сформулированы выводы по результатам исследования. Приложение содержит акт об использовании результатов работы и свидетельство о государственной регистрации программы для ЭВМ, дипломы о победе в конкурсах от компании «National Instruments» и министерства экономического развития Астраханской области.. ОСНОВНЫЕ РЕЗУЛЬТАТЫ РАБОТЫ 16 1. Проведен анализ группы роботов как объекта управления, позволяющий выявить состав вектора входных, выходных и внутрисистемных переменных. 2. Разработана методика построения математической модели рабочей зоны группы мобильных роботов с учетом взаимодействия их задач. 3. На основе предложенной методики построена математическая модель и подтверждена ее адекватность, относительная ошибка расчетов по модели не превышает 1%. 4. Синтезирована модель взаимодействия и построено дерево подчинения для группы роботов, позволяющее представить связь внутри группы роботов. 5. Разработано программное обеспечение, позволяющее моделировать группы роботов и множества задач, поставленное перед ними. 6. Синтезировано алгоритмическое обеспечение определения Паретооптимального семейств стратегий решения множества взаимосвязанных задач группой до 12 роботов. 7. Разработана архитектура системы управления группой мобильных роботов, реализующие предложенные модели и алгоритмы. 8. Спроектирована и разработана физическая модель группы, состоящей из трех роботов. 9. Проведен расчет диапазона эффективного использования алгоритма синтеза Парето-оптимального управления на основе метода справедливых компромиссов для определения отношения робот/задача .. Перечень работ, опубликованных по теме диссертации Публикации в центральных изданиях, включенных в перечень периодических изданий ВАК РФ 1. Проталинский И.О. Исследование эффективности группового управления роботами методом имитационного моделирования / И.О. Проталинский, И.А. Щербатов // Вестник Саратовского государственного технического университета. 2010. № 4(50). С. 34-37. 2. Проталинский И.О. Координация работы промышленных манипуляторов на основе сенсорной информации / И.О. Проталинский, И.А. Щербатов // Датчики и cистемы. 2010. № 8 (135). С. 28-32. 3. Проталинский И.О. Универсальная мобильная платформа для роботов, обслуживающих социальную и бытовую сферу / И.О. Проталинский, С.А. Кирилин, Д.В.Елизаров // Вестник Астраханского государственного технического университета. Серия: управление, вычислительная техника и информатика. 2011. №2. С. 34-38. Публикации в зарубежных изданиях 4. Protalinskii I.O. Optimal Strategy Synthesis for a Group of Mobile Robots with Variable Structure / I.O. Protalinskii, I.A. Sherbatov, N.D. Shishkin // World Applied Sciences Journal (Information Technologies in Modern Industry). 2013. № 4. P. 268275. 17 Публикации в других изданиях 5. Проталинский И.О., Архитектура системы взаимодействия промышленных манипуляторов / И.О. Проталинский, И.А. Щербатов // Вестник Астраханского государственного технического университета. Серия: управление, вычислительная техника и информатика. 2011. №2. С. 76-83. 6. Проталинский И.О. Математическая модель группы мобильных роботов для решения множества взаимосвязанных задач / И.О. Проталинский // Математические методы в технике и технологиях: сб. тр. XXVI Междунар. науч. конф. Т. 8. Саратов: СГТУ, 2013. С. 107-110. 7. Проталинский И.О. Фреймовая модель распределения взаимосвязанных задач в рабочей зоне группы мобильных роботов / И.О. Проталинский // Математические методы в технике и технологиях: сб. тр. XXVI Междунар. науч. конф. Т. 8. Саратов: СГТУ, 2013. С. 77-80. 8. Проталинский И.О., Координация работы промышленных манипуляторов на основе сенсорной информации / И.О. Проталинский, И.А. Щербатов // Математические методы в технике и технологиях: сб. тр. XXIII Междунар. науч. конф. Т. 6. Саратов: СГТУ, 2010. С. 234-236. 9. Проталинский И.О., Система интерпретирования голосовых команд для управления мобильным роботом / В.А. Бородин, И.О. Проталинский // Математические методы в технике и технологиях: сб. тр. XXVI Междунар. науч. конф. Т. 8. Саратов: СГТУ, 2013. С. 80-84. 10. Проталинский И.О. Определение траектории движения интеллектуального мобильного робота в среде с подвижными объектами / П.В. Степанов, И.О. Проталинский // Математические методы в технике и технологиях: сб. тр. XXVI Междунар. науч. конф. Т. 8. Саратов: СГТУ, 2013 С. 84-87. Свидетельства о государственной регистрации программ 11. Свидетельство об официальной регистрации программы для ЭВМ «Мультиробот 1.0» № 2010614538 от 09.07.2010 авторы: Проталинский О.М., Щербатов И.А., Проталинский И.О., Голубкин И.А. Подписано в печать 14.11.13 Формат 6084 1/16 Бум. офсет. Усл. печ. л. 1,0 Уч.-изд. л. 1,0 Тираж 100 экз. Заказ 188 Бесплатно Саратовский государственный технический университет 410054, Саратов, Политехническая ул., 77 Отпечатано в Издательстве СГТУ. 410054, Саратов, Политехническая ул., 77 Тел.: 24-95-70; 99-87-39, е-mail: izdat@sstu.ru 18