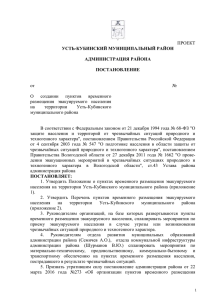
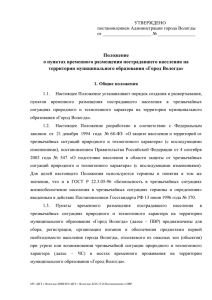
Объективные возможности для решения задачи обнаружения
реклама

Е.В. Бурданова (к.т.н.) ПОТЕНЦИАЛЬНЫЕ ВОЗМОЖНОСТИ ОБНАРУЖЕНИЯ НЕПОДВИЖНЫХ ОБЪЕКТОВ НА ЗЕМНОЙ ПОВЕРХНОСТИ НА ОСНОВЕ АНАЛИЗА СТАТИСТИЧЕСКИХ СВОЙСТВ ОТРАЖЕННЫХ СИГНАЛОВ г. Белгород, Белгородский государственный университет Объективные возможности для решения задачи обнаружения цели на фоне подстилающей поверхности (ПП), в системах с поляризацио нной обработки информации, могут быть определены на основе анализа статистических свойств отраженных сигналов. При этом, для радиолокационных систем зондирующих на двух ортогональных поляризациях и производящих прием на двух ортогональных поляризаций по каждому излученному сигналу (например, вертикальная и горизонтальная), входной сигнал можно представить в виде поляризационного вектора рассеяния (ПВР), образованного из поляризационной матрицы рассеяния [1]. T U i U 11 (t i ) U 21 (t i ) U 22 (t i ) (1) где: U 11 (ti ) = U11 (ti )e j1 , U 21 (ti ) = U 21 (ti ) j 0 , U12 (ti ) = U 12 (ti ) j 0 , U 22 (ti ) = U 22 (ti )e j2 , 1 11 21 , 2 22 12 - относительные фазы между основными и кроссовыми компонентами ПВР. В дальнейшем рассматривается случай однопозиционной локации, когда кроссовые компоненты отраженного сигнала равны U 21(ti ) = U12 (ti ) . Каждая компонента вектора выборочных значений может иметь свой закон распределения. Следовательно, многомерное совместное распределение совокупности выборочных значений должно описываться некоторым многомерным законом, включающим в себя компоненты с различными законами распределения. Получить строгое аналитическое выражение подобных разнокомпонентных законов очень сложно [2], поэтому почти все выводы многомерной статистики опираются на предположении о нормальности рассматриваемых распределений. Тогда для решения задачи обнаружения необходимо проводить оценивание параметров (вектора средних и ковариационных матриц) нормальных плотностей вероятностей, используемых в решающем правиле. Статистические свойства ПВР целей и подстилающей поверхности могут быть однозначно представлены определенными характеристиками (параметрами) соответствующих областей локализации (ОЛ) ПВР. Различия характеристик ОЛ ПВР целей и подстилающей поверхности являются предпосылками для построения решающих правил обнаружения цели на фоне подстилающей поверхности. В связи с этим, особенный интерес представляет оценка возможностей радиолокационных систем с поляризационной обработкой информации при принятии решения о наличии цели на фоне ПП. Для дальнейших рассуждений введем ряд исходных понятий. Использование аппарата многомерного статистического анализа предопределяет представление ортогонально поляризованных составляющих отраженного сигнала в виде многомерного (в частности, комплексного четырехмерного) вектора [2-5]. Ряд авторов, для представления вектора предлагают использовать многомерное пространство с направ- ляющими ортами [4,6]. Для многомерных комплексных векторов направляющие орты должны тоже являться комплексными e 1 , e 2 , e 3 , e 4 и применительно к ПВР поставлены в соответствие элементам ПВР [6]. , e 3 U 21 , e 4 U 22 , (2) e1U 11 e2 U12 , иначе называется ковариационно – Ковариационная матрица M поляризационной матрицей (КПМ), является вторым центральным моментом распределения ПВР и может быть определена согласно выражения [6]: N T* -m 1 U M U m , i i N - 1 i 1 (3) где: N – объем выборки ПВР, 1 N m U i - математическое ожидание выборки ПВР. N i 1 В выражении (3) * - знак комплексного сопряжения. Степень статистической связи элементов исходного вектора фиксируемых параметров между собой отражают элементы КПМ. Методика анализа различных свойств сигналов, отраженных от различных объектов включает следующие вычислительные процедуры: ; оценку элементов вектора математического ожидания μ и КПМ M определение собственных значений и собственных векторов КПМ. Количественное описание различий статистических свойств ПВР объектов требует определения критерий оценки близости ОЛ ПВР двух сравниваемых объектов. Допустим, что ОЛ ПВР объекта с заданными геометрическими характеристиками полностью описывается собственными значениями i , i1,...,n , и нормированными собственными векто рами b i , i 1,...,n . Параметры ОЛ ПВР объекта с другими характери- стиками, степень близости которого к заданной необходимо оценить, обозначим 'i и bi' , i 1,...,n . В качестве показателей близости двух об- ластей локализации ПВР могут быть использованы, например, вектор λ модулей разностей собственных значений i , i 1,...,n , соответствующих спектральных матриц Λ и Λ ' . λ = 1 2 ... n = 1 1' ' 2 2 ... ' n n , (4) и вектор комплексных углов i , i1,...,n , между соответствую- щими собственными векторами матриц B и B ' собственных векторов. T (5) 1 2 ... n , где i arccos b i , b i' , - знак скалярного произведения векторов. Чем меньше элементы векторов λ и , тем больше степень бли- зости двух рассматриваемых ОЛ ПВР объектов, и, наоборот, тем больше отличаются в КПП области локализации ПВР по размерам и ориентации соответственно. В (3) выражение под суммой имеет вид (U 11i m 11 )(U 11i m 11 )* * (U 21i m 21 )(U11i m 11 ) (U 12i m 12 )(U 11i m 11 )* * (U 22i m 22 )(U 11i m 11 ) (U 11i m 11 )(U 21i m 21 )* (U 21i m 21 )(U 21i m 21 )* (U 12i m 12 )(U 21i m 21 )* (U 22i m 22 )(U 21i m 21 )* (U 11i m 11 )(U 12i m 12 )* (U 21i m 21 )(U 12i m 12 )* (U 12i m 12 )(U 12i m 12 )* (U 22i m 22 )(U 12i m 12 )* (U 11i m 11 )(U 22i m 22 )* (U 21i m 21 )(U 22i m 22 )* * (U 12i m 12 )(U 22i m 22 )* (U 22i m 22 )(U 22i m 22 )* Проанализировав данное выражение можно заметить, что в случае однопозиционной локации, когда элементы ПВР U 12 i U 21i (в силу теоремы взаимности [7]), КПМ становиться вырожденной. Вторая и третья строка матрицы становятся линейно зависимыми. Следовательно, ранг такой матрицы будет меньше ее размерности и меньше размерности исходного ПВР (т.е. он не может быть больше трех). Таким обра равно нулю (4 0) . зом, четвертое собственное значение КПМ M Собственные векторы находятся из выражения: j I) b j 0 , j=1,2,3 (M (6) где I - единичная матрица, b j - собственный вектор. Решив систему уравнений для каждого j (j=1,2,3) ( M 11 j )b1 M 12 b2 M 13b3 M 14 b4 0 M 21b1 ( M 22 j )b2 M 23b3 M 24 b4 0 M 31b1 M 32 b2 ( M 33 j )b3 M 34 b4 0 M 41b1 M 42 b2 M 43b3 ( M 44 j )b4 0 (7) получим элементы собственного вектора соответствующего каждому собственному значению j . Таким образом, с помощью полученных выражений 4, 5, 6 возможно проводить количественную оценку степени близости областей локализации каждого элемента разрешения в пределах сектора обзора РЛС и входного сигнала в пределах сектора обзора РЛС. При проведении вычислительных экспериментов в качестве входных выборок ПВР использовались натурные данные, для получения которых был использован макет РЛС с различными поляризационными режимами зондирования. В макете реализовано последовательное во времени излучение когерентно связанных ортогональных по поляризации сигналов, а также одновременный когерентный прием соответствующих отраженных ортогонально поляризованных составляющих сигнала. Двухканальная по поляризации антенна выполнена по схеме Коссегрена с облучателем на круглом волноводе [8]. ПВР, измеряемый этой системой, представляет собой значения амплитуд и относительных фаз на выходе приемных каналов макета Т U U 11e j U 21 U 12 U 22 e j , (8) 1 2 Первый индекс обозначает вид поляризации сигнала при приеме (1- вертикальная поляризация, 2- горизонтальная поляризация), второй индекс - вид поляризации сигнала при излучении (1- вертикальная по- ляризация, 2- горизонтальная поляризация). 1 - значение относительной фазы между принятыми сигналами U 11 и U 21 , аналогично, 2 - значение относительной фазы между принятыми сигналами U 22 и U12 U 12 Зоной обзора макета являлась территория аэропорта г. Белгорода и прилегающие окрестности. С использованием макета были измерены ПВР в пределах сектора обзора РЛС для каждого разрешаемого объема по азимуту и по дальности (разрешаемый объем РЛС по азимуту составляет 3 градуса, по дальности 100 метров). Были проведены оценки первого начального (вектора математического ожидания) и второго центрального (КПМ) моментов выборок ПВР текущих параметров распределения входного сигнала (отдельно) и оценки распределения этого сигнала в некоторой окрестности данного текущего элемента разрешения (отдельно). Окрестностью элемента разрешения является задаваемая величина окна усреднения по дальности и по азимуту порядка 6 элементов разрешения по азимуту и 8 элемента разрешения по дальности (рис. 1) [9]. Рис. 1. Принцип формирования окон усреднения Где N d N b - кол-во дискрет в секторе обзора РЛС, N od N ob - размер окрестности элемента разрешения для оценки параметров земной поверхности. В пределах данной окрестности ха- рактеристики отражений от земной поверхности предполагаются однородны. N pd N pb - кол-во дискрет в разрешаемом объеме измерителя. Для полученных КПМ как элемента разрешения, так и окрестности элемента разрешения были рассчитаны собственные числа матриц: I) 0 det(M (9) Для каждого окна разрешения (объекта) и окрестности элемента разрешения (земной поверхности) в пределах сектора обзора РЛС (0 180 градусов) на разных дальностях были рассчитаны собственные числа КПМ. Т.к. кроссовые компоненты отраженного сигнала равны близко к 0 и U 21(ti ) = U12 (ti ) то, 4-ое собственное значение КПМ M определяется шумами эксперимента, поэтому на рисунках представлено 3 собственных числа. Обозначение на рис. 2- 7 по оси абсцисс- азимут от 0 0-1800; по оси ординат – соответствующие значения собственных чисел. На рис. 2 приведены собственные числа КПМ ПВР земной поверхности на дальности 738 м. На рис 3 приведены нормированные собственные числа КПМ ПВР земной поверхности на дальности 738 метров. Рис. 2. Собственные числа КПМ Рис. 3. Нормированные собственПВР земной поверхности на даль. ные числа КПМ ПВР земной по738 м. верхности на дальности 738 м. Анализируя данные рисунки можно сделать вывод о том, что величина разброса энергии вдоль первого собственного вектора имеет наибольшее значение, в то время как величина разброса энергии вдоль третьего собственного вектора имеет наименьшее значение. На протяжении всего сектора обзора ни одно из собственных значений на представленной дальности ни обращается в нуль. На азимуте от 40-60 градусов изменение собственных чисел КПМ входной выборки ПВР по сектору обзора 6 на 8 разрешаемых объемов РЛС практически отсутствует. Собственные числа КПМ, рассчитанные для каждого элемента разрешения в пределах сектора обзора РЛС на дальности 738 м., приведенные на рис. 4. На рис. 5 приведены нормированные собственные числа КПМ ПВР каждого элемента разрешения на дальности 738 м. Рис. 4. Собственные числа КПМ Рис. 5. Нормированные собствен- ПВР каждого элемента разрешения ные числа КПМ ПВР каждого эле- на дальности 738 м. мента разрешения на дальности 738 м. Анализируя данные рисунки можно сделать вывод о том, что величина разброса энергии вдоль первого собственного вектора имеет наибольшее значение, в то время как величина разброса энергии вдоль третьего собственного вектора имеет наименьшее значение, аналогич- но, как и для значений собственных чисел КПМ входной выборки ПВР. Т.к. ни одно из собственных значений не обращается в ноль, то ранг КПМ всегда равен 3 и область локализации ПВР будет трехмерная комплексная. Изрезанность структуры изменения собственные числа КПМ для каждого элемента разрешения в пределах сектора обзора РЛС (0180 градусов) больше, чем изрезанность структуры изменения собственных чисел КПМ входной выборки ПВР в пределах сектора обзора РЛС на той – же дальности. Это объясняется тем, что размер окна элемента разрешения меньше, чем размер окна окрестности элемента разрешения. На азимуте 40-60 градусов на рис. 2.5 можно видеть резкий скачок значений всех трех собственных чисел КПМ, что может говорить о наличии объекта на данном азимуте. На данном азимуте на данной дальности находилось строение типа «ангар». Аналогичные результаты были получены и на остальных дальностях сектора обзора РЛС. Количественные оценки различий соответственных собственных значений λ 1 , λ 2 , λ 3 , рассчитанные в соответствии с выражением 6, для дальности 738 м. приведены на рис 6, для дальностей 1242 на рис 7. Рис. 6 Модуль разностей соб- Рис. 7 Модуль разностей собственных значений соответствую- ственных значений соответствующих спектральных матриц на щих спектральных матриц на дальности 738 м. дальности 1242 м. Анализируя данные рисунки можно сделать вывод о том, что модули разности собственных значений для всех рассматриваемых случаев и во всем диапазоне углов наблюдения отличны от 0. Это позволяет сделать вывод, что области локализации ПВР элемента разрешения и окрестности элемента разрешения различаются по форме и размерам. Результаты анализа отличий статистических свойств ПВР элементов разрешения и земной поверхности создают предпосылки для решения задач обнаружения объектов на фоне земной поверхности известными методами статистической обработки ПВР. Работа выполнена в рамках реализации ФЦП «Научные и научно-педагогические кадры инновационной России» на 2009 – 2013 годы. г.к. П1260. Список литературы. 1. Киселев А.З. Теория радиолокационного обнаружения на основе исполь-зования векторов рассеяния целей.- 2-е изд.-СПБ.:Наука. 2005. 2. Фомин Я.А., Тарловский Г.Р. Статистическая теория распознавания образов.- М.: Радио и связь, 1986. 3 Фукунага, К. Введение в статистическую теорию распознавания образов – М.: Наука, 1979. 4 Либенсон, М.Н. Хесин А.Я., Янсон Б.А. Автоматизация распознавания телевизионных изображений – М.: Энергия, 1975. 5 Айвазян, С.А. Бухштабер В.М., Енюков И.С., Мешалкин Л.Д. Прикладная статистика: Классификация и снижение размерности: Справ. – М.: Финансы и статистика, 1989. 6. Андерсон, Т. Введение в многомерный статистический анализ: Пер. с англ. — М: Физматгиз, 1963. 7. Куликов, Е.И. Методы измерения случайных процессов – М.: Радио и связь, 1986. 8. Бурданова, Е.В. Жиляков Е.Г., Денисов А.П. Олейник И.И., Синани А.И. Техническая реализация алгоритмов обнаружения целей на фоне помех в локационных системах с поляризационным зондированием - Вопросы радиоэлектроники Серия «Электронная вычислительная техника» Выпуск 1.- М. 2008. 9. Бурданова, Е.В. Денисов А.П. Алгоритмы выделения цели на фоне подстилающей поверхности в локационных системах с различными поляриметрическими режимами работы. - Третья Международная научно-практическая конференция «Исследование, разработка и применение высоких технологий в промышленности» том 9. СанктПетербург. – 2007.