«Друг» МУНИЦИПАЛЬНОЕ АВТОНОМНОЕ ОБЩЕОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ «СРЕДНЯЯ ОБЩЕОБРАЗОВАТЕЛЬНАЯ ШКОЛА №2»
реклама

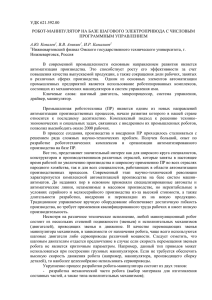
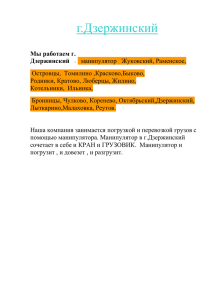
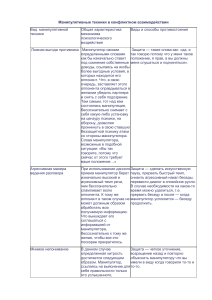
МУНИЦИПАЛЬНОЕ АВТОНОМНОЕ ОБЩЕОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ «СРЕДНЯЯ ОБЩЕОБРАЗОВАТЕЛЬНАЯ ШКОЛА №2» Микрорайон «В» д.26,г.Троицк ,г.Москва,142190 Тел./факс: (495)-851-06-74 тел 851-31-11 E-mail: <shkola2troitsk@mail.ru> http://2schkola.ru/ «Друг» Над выполнением проекта «Друг» работали ученики Муниципального автономного общеобразовательного учреждения «Средняя общеобразовательная школа №2»: Наумов Никита Константинович (9а класс), Дьяконов Андрей Андреевич (7в класс). Руководитель проекта заместитель директора по ИКТ МАОУ СОШ №2 Тихонов Николай Анатольевич. Основополагающий и проблемный вопрос: проблема обустройства быта людей с ограниченными возможностями. Цель работы: создание телеуправляемой роботизированной платформы (РП) и элементов управления для расширения возможностей людей с нарушением функций опорно-двигательного аппарата. Техническая реализация: РП на трехколесном шасси с двумя ведущими колесами. На платформе размещается манипулятор с четырмя степенями свободы, на конце которого размещается камера и захват. Управление осуществляется платой Arduino Uno и микрокомпьютером Raspberry Pi. Управление платформой осуществляется через веб-интерфейса с любого устройства по сети WiFi. Допускается подключение модульного пульта управления к управляющему компьютеру. Введение. Люди с ограниченными возможностями, инвалиды, есть везде. По оценкам Организации Объединённых Наций (ООН), чуть ли не каждый десятый человек на планете является инвалидом. Инвалид (человек с ограниченными возможностями и особыми потребностями) — человек, возможности которого ограничены из-за его физических или умственных, психических отклонений. Инвалиды — люди с травмами позвоночника, ампутацией нижних конечностей, детским церебральным параличом, рассеянным склерозом, люди с ограничением по зрению, с нарушением слуха, с психическими заболеваниями и др. Человек не виноват, что родился или стал именно таким. Он не виноват в том, что не всегда может работать и сам себя обеспечивать. Инвалидность — далеко не всегда врождённое состояние, наследственность. Чаще всего причиной становится случайность: в странах, где недавно была война, детей калечат оставшиеся в земле мины. Несоблюдение техники безопасности на производстве становится причиной травматизма. Случается, что люди падают, ломают ноги. Существует не малое количество заболеваний в следствии которых человек оказывается прикован к инвалидному креслу или даже кровати. У таких людей уменьшаются возможности, но не уменьшаются потребности и они становятся очень зависимы от помощи окружающих. Даже такая мелочь, как поднять упавший на пол предмет, требует присутствие другого человека рядом. А если такого человека сейчас нет рядом? Придется ждать, и может быть не 5 минут. Для решения подобных проблем мы решили создать комплекс “Друг” состоящий из телеуправляемой платформы и пульта управления. Наш комплекс позволит людям с ограниченными возможностями выполнять простые ежедневные операции, такие как принести вещь, поднять вещь, подать на уровень коляски или кровати объект, без помощи окружающих. Техническое описание модели. Для демонстрации принципов работы такого комплекса мы создали его уменьшенную модель «Друг». Данная модель позволяет оператору управлять перемещением платформы в пределах покрытия сети Wi-Fi, управлять манипулятором и захватом на нем, подавать звуковой сигнал для привлечения внимания. При помощи манипулятора платформа имеет возможность захватывать, перемещать и подавать на высоту до 50 см предметы весом до 200г и размером до 10 см в одном из измерений. Возможно взаимодействие управление бытовой техникой с крупными органами управления. Платформа оснащена датчиками препятствий для предотвращения столкновений платформы с предметами. Для контроля за состоянием и положением устройства, на экран оператора передаются данные о состоянии датчиков, напряжение силовой батареи и углах наклона приводов манипулятора. Состав робота: Миникомпьютер Raspberry Pi Model B Камера Raspicam для Raspberry Pi WiFi адаптер TP-LINK TL-WN727N Arduino Leonardo Драйвер моторов L298P Драйвер моторов A4988 Сервопривод Spring Model Electronic SR431 x 3 шт. Сервопривод Spring Model Electronic SR430 Микромотор с редуктором 100:1 ИК датчик расстояния GP2Y0D810Z0F x 2 шт. Электромоторы с металлическим редуктором Pololu 20Dx44L x 2шт. Колесо всенаправленное DAGU, Omni wheel Цифровой BEC Impact 6A Аккумулятор Impact 3200мАч 7.4В Аккумулятор Defender ExtraLife 10400 Получившуюся модель можно разделить на три основных части: шасси, манипулятор с 4 степенями свободы, управляющая электроника. Шасси: Шасси состоит из двух пластин треугольной формы выполненных из листа ламината. Пластины соединяются четырьмя отрезками строительной шпильки диаметром 8 мм и образуют двухуровневую платформу. На нижнем уровне располагается вся электроника и источники питания. Манипулятор устанавливаются на верхнем уровне. Таким образом вся электроника защищается от попадания жидкости при работе платформы. Двигатели закрепляются алюминиевого платформой. В качестве третьего колеса используется всенаправленное колесо с подшипником. Для предотвращения наезда платформы на препятствия перед каждым колесом установлен инфракрасный датчик препятствий. на кронштейне профиля из под Трехколесная схема с всенаправленным колесом имеет большую грузоподъёмность по сравнению с полноприводной четырехколесной системой. Манипулятор: Манипулятор был разработан в программном пакете AutoCAD и напечатан на 3D-принтере. Механизм состоит из поворотного “стола” и трех “плечей”. Каждое из “плечей” закрепляется на сервоприводах SR431. “Стол” приводится в движение сервоприводом SR430. Для лучшего контроля манипулятора, сервоприводы были доработаны и получили обратную связь. За счет доработки нам удалось избавится от резкого рывка манипулятора в стартовое положение при включение робота. На последнем плече манипулятора располагается захват с коллекторным микромотором и винтовой передачей. На захвате установлены два концевых переключателя и ультразвуковой дальномер. Для контроля усилия сжатия захвата используется датчик тока. Шлейфы управления сервоприводами, мотором и камерой закреплены нейлоновыми хомутами к правому торцу манипулятора. Для облегчения управления манипулятором был разработан и реализован алгоритм поиска предметов на полу. Поиск осуществляется путем построения карты рельефа поверхности, на основе которой манипулятор принимает решение о возможности подъема предмета. Электроника: Управление платформой осуществляет плата Arduino, к которой подключены датчики и исполнительные устройства: контроллер моторов на базе микросхемы L298D, инфракрасные датчики расстояния, сервоприводы, сирена. Команды управления получает Arduino по виртуальному последовательному порту. Микрокомпьютер Raspberry Pi с подключённой камерой и Wi-Fi сетевой картой, осуществляет захват и кодирование видео, организацию канала связи с платформы. оператором Управление осуществляется при помощи программного продукта WebIOPi, который позволяет организовать управление различными система от электрочайника до “Умного дома”. Пульт управления: Для операторов нарушениями двигательного разработан управления, аппарата модульный с был пульт возможностью адаптации под конкретного оператора и его возможности. На данный момент с различными функций опорно- существуют модели трех блоков с 2, 4 и 8 кнопками. Блок с 2 кнопками предназначен для управления захватом; блок с 4 кнопками – управление перемещением; блок с 8 кнопками – управление манипулятором. Кнопки подключаются к контроллеру Arduino Leonardo. Контроллер определяется операционной системой компьютера как клавиатура. Каждая из кнопок контроллера соответствует определенной клавиши клавиатуры. Демонстрация: 20.05.05 Мы посетили центр социальной реабилитации продемонстрировали “Солнышко” работу и нашего комплекса педагогам, детям и их родителям. Во время презентации всем желающим была предоставлена возможность попробовать себя в роли “оператора”. перемещением Управление платформы оказалось интуитивно понятным и не вызвало затруднений, чего нельзя сказать о манипуляторе на освоение управления, которым потребовалось некоторое время. После встречи и общения с целевой аудиторией нашего проекта были сделаны следующие выводы: Система может использоваться в качестве средства взаимодействия между воспитанниками подобных центров в рамках специализированных занятий. Стали понятны необходимые размеры и возможности “Большого” робота. Был осознан ошибочный подход к управлению манипулятором. Необходимо управление положением последнего пространстве, а не задание углов каждого сустава. звена в В процессе создания робота мы столкнулись с рядом технических проблем, большую часть которых нам удалось решить. В первой версии модели в качестве источника питания использовался свинцовый аккумулятор (CSB GP-645, 6 В, 4.5 Ач, 840 г.) и 4 небольших мотора, что не позволяло модели уверено поворачиваться на месте. В обновленной версии была изменена форма платформы и заменены моторы на более мощные. В то же время современный литий-полимерный аккумулятор (Impact, 7.4 В, 3.3 Ач, 200 г.) занял место тяжелого свинцового. При замене силового аккумулятора повысилось напряжение бортовой сети и встал вопрос понижения напряжения для питания сервоприводов (Umax = 6 В.). Решением стал понижающий стабилизатор напряжения BEC 6A фирмы Impact, способный понизить напряжение до 6В и работать при суммарном токе 6А. Для обеспечения лучшего обзора при работе и перемещении камера переместилась манипулятора. с верхнего яруса платформы на последний сустав Заключение: В результате проделанной работы была разработана и построена модель телеуправляемой платформы, которую планируется использовать на занятиях по социальной адаптации людей с ограниченными возможностями. Полученный опыт будет использоваться для создания опытного экземпляра платформы.