Попов Николай Иванович Динамика неустановившихся режимов пространственного движения робота-квадрокоптера по заданной траектории
реклама

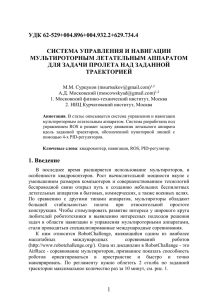
1 На правах рукописи Попов Николай Иванович Динамика неустановившихся режимов пространственного движения робота-квадрокоптера по заданной траектории 01.02.06 – Динамика, прочность машин, приборов и аппаратуры АВТОРЕФЕРАТ диссертации на соискание ученой степени кандидата технических наук Курск – 2014 2 Работа выполнена в федеральном государственном бюджетном образовательном учреждении высшего профессионального образования «Юго-Западный государственный университет» Научный руководитель: доктор технических наук, профессор, Заслуженный деятель науки РФ Яцун Сергей Федорович Официальные оппоненты: Савин Леонид Алексеевич доктор технических наук, профессор Госуниверситет – УНПК (г. Орел), заведующий кафедрой «Мехатроника и международный инжиниринг» Рублев Сергей Борисович, кандидат технических наук, Начальник ОКБ НИЦ (г. Курск), ФГУП «18 ЦНИИ МО РФ» Ведущая организация: Военный учебно-научный центр военно-воздушных сил «Военно-воздушная академия им. проф. Н.Е.Жуковского и Ю.А. Гагарина»(г.Воронеж) Защита состоится 28 июня 2014 г. в 14.00 на заседании диссертационного совета Д 212.105.01 при Юго-Западном государственном университете по адресу: 305040, г. Курск, ул. 50 лет Октября, д. 94. С диссертацией можно ознакомиться в библиотеке Юго-Западного государственного университета и на официальном сайте: www.swsu.ru Автореферат разослан « Ученый секретарь диссертационного совета Д 212.105.01 » мая 2014 г. Лушников Борис Владимирович 3 ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ Актуальность работы. В настоящее время в мире интенсивно расширяется область использования мобильных роботов. Для успешного выполнения обширных задач мониторинга окружающей среды и чрезвычайных ситуаций роботы должны обладать высокой маневренностью, быстродействием и точностью движения по заданным траекториям. В последние годы получает развитие новый класс небольших мультироторных аппаратов, способных нести диагностическую и информационную фото- или видеоаппаратуру. Мультикоптеры, обладают рядом достоинств, таких, как простота и надежность конструкции и схемы стабилизации, а также малая масса при существенной массе полезной нагрузки. Особенно эффективным, является применение коптеров в режимах автономного полета. Теория управляемого движения многороторных роботов основывается на работах многих отечественных исследователей, в том числе отечественных ученых: С.А. Белоконь, Ю.Н. Золотухин, А.С. Мальцев, А.А. Нестеров, М.Н. Филлипов (Институт автоматики электрометрии СО РАН), П.А. Гриценко, А.Б.Бушуев, Ю.В.Литвинов, Г.М.Шмигальский (НИУ ИТМО), А.С. Панов, С.П. Чашников (МГТУ им. Баумана), а также и зарубежных ученых: G. Bastin, G. Campion, C. Canudas de Wit, W. Dixon, Y.H. Fung, A., Isidori Hoffmann, N.Goddemeier, T.Bertram, Tommaso Bresciani и др. В то же время вопросы динамики нестационарных режимов движения робота при внешних воздействиях, быстрого взлета, разгона и выхода на заданный уровень высоты и скорости изучены недостаточно. Особый интерес представляет изучение поведения навесного оборудования, предназначенного для мониторинга окружающей среды. Именно здесь скрываются резервы повышения эффективности и быстродействия роботов. Поэтому исследования посвященные дальнейшему совершенствованию методов математического моделирования нестационарных режимов движения роботов-мультикоптеров с учетом навесного оборудования являются актуальными. Объектом исследования является многозвенная электромеханическая система, состоящая из твердого тела, четырех быстровращающихся роторов, симметрично установленных на теле относительно центра масс, четырех управляемых электроприводов, системы управления, а также установленной на теле с помощью трехкоординатного упруго-вязкого подвеса материальной точки. Предметом исследования являются динамические процессы, протекающие в многозвенной электромеханической системе в нестационарных режимах движения при наличии возмущающих воздействий. Цель работы и основные задачи исследования. Целью диссертационной работы является разработка теоретических основ и инструментальных средств проектирования многозвенной электромеханической системы, имитирующей движение квадрокоптера и подвеса навесного оборудования в нестационарных режимах движения. 4 Методы исследования. Для решения поставленных задач использовались различные разделы теоретической механики, теории механизмов и машин, методы математического моделирования динамических систем. При создании программных продуктов использованы математические пакеты MathCAD, Matlab/Simulink, SolidWorks. Достоверность научных положений и результатов. Основные научные результаты диссертации получены на основе математического аппарата теоретической механики, а также методов экспериментальных исследований. Результаты экспериментальных исследований полностью согласуются с теоретическими результатами. Научная новизна работы заключается в разработке -математических моделей, описывающих динамику управляемого движения многозвенной электромеханической системы робота, с учетом свойств электроприводов, гироскопических эффектов, кинематики вращения корпуса, алгоритмов формирования управляющих напряжений и внешних периодических воздействий; -выявлении резонансных эффектов, возникающих при использовании пропорционального регулятора в режиме зависания коптера и установлении высокочастотных колебаний при использовании нелинейного логического алгоритма управления; -научном обосновании методики определения кинематических и динамических параметров, обеспечивающих заданные режимы движения робота по траектории; -разработке математической модели движения навесного оборудования, установленного на упруго-вязком подвесе и научном обосновании выбора параметров упруго-вязкого подвеса. Основные положения, выносимые на защиту: 1.Математическая модель робота при движении по заданным траекториям, с учетом свойств электроприводов, гироскопических эффектов, кинематики вращения корпуса, алгоритмов формирования управляющих воздействий, и действия ветровой нагрузки. 2.Математическая модель пространственных колебаний навесного оборудования с учетом свойств упруго-вязкой подвески навесного оборудования. 2. Закон изменения вертикальной координаты от времени с учетом динамических параметров привода, обеспечивающий автономный выход робота на заданную высоту с нулевой вертикальной скоростью, что повышает быстродействие робота по сравнению с традиционным неуправляемым пуском. 3. Зависимости амплитуды колебаний корпуса квадрокоптера от частоты внешнего возмущающего воздействия, позволившие выявить область параметров пропорционального и логического нелинейного регуляторов, при которых происходит значительное снижение амплитуды отклонения корпуса от заданного положения при наличии периодического внешнего воздействия. 5 4. Математическая модель пространственного движения навесного оборудования с учетом упруго-вязкой подвески навесного оборудования, позволяющая установить область рациональных параметров подвески. Структура и объем работы. Диссертация состоит из введения, четырех глав, заключения и списка литературы, насчитывающего 83 наименований. Основная часть работы изложена на 153 страницах машинописного текста. Практическая ценность работы состоит в разработке инструментальных средств проектирования квадрокоптера, оснащенного навесным оборудованием и создание экспериментального образца, управляемого системой автономного автоматического управления на основе разработанных в работе алгоритмов управления движением робота в режимах зависания, взлета и посадки. Образец робота может быть использован для проведения экспериментальных исследований в рамках решения задач мониторинга. Созданные методики расчета и инструментальные средства проектирования квадрокоптеров могут применяться при проектировании сервисных роботов, роботов для работы в условиях чрезвычайных ситуаций, а также могут применяться в учебном процессе. Результаты проведенных в работе исследований использованы при выполнении гранта РФФИ №08-08-00438-а, рамках федеральной целевой программы «Научные и научно-педагогические кадры инновационной России» на 2009-2013 годы. Апробация работы. Основные результаты работы докладывались и обсуждались на вузовских научных конференциях студентов и аспирантов в области научных исследований на кафедре теоретической механики и мехатроники (г. Курск, 2013, 2014), всероссийской научно-практической конференции с международным участием «Современные технологии обеспечения гражданской обороны и ликвидации последствий стихийных бедствий» (г. Воронеж, 2013), II всероссийской научно-практической конференции с международным участием «Проблемы безопасности при ликвидации последствий чрезвычайных ситуаций» (г. Воронеж, 2013), VIII Международной научно-практической конференции «Актуальные вопросы науки» (Москва, 2013), XIV Всероссийской научно-технической конференции и школы молодых ученых, аспирантов и студентов «Авиакосмические технологии (АКТ-2013)» (Воронеж, 2013), на «Академических Жуковских чтениях» (г. Воронеж, 2013), на семинаре кафедры мехатроники и международного инжиниринга Госуниверситет – УНПК (г. Орел, 2014). . Публикации. По теме диссертационной работы опубликовано 9 научных работ в том числе: 5 статей (из них 4 статьи в изданиях, рекомендованных перечнем ВАК РФ), 1 свидетельство о государственной регистрации программы для ЭВМ. 6 Краткое содержание работы. Во введении обосновывается актуальность темы исследования, сформулированы цель и задачи работы, дана общая характеристика диссертации, показана научная новизна и практическая значимость, приведены основные положения, выносимые на защиту. В первой главе рассмотрены различные типы мультироторных роботов, приведена структура исполнительных систем роботов, проведен анализ существующих математических моделей, описывающих движение мультироторных роботов, выявлены проблемы, сдерживающие дальнейшее развитие таких роботов. Сформулированы актуальность темы исследований, решаемая проблема, цели и задачи диссертации. Во второй главе описана математическая модель движения многозвенной электромеханической системы, состоящей из твердого тела, четырех быстровращающихся роторов, симметрично установленных на теле относительно центра масс, четырех управляемых электроприводов, системы управления с учетом свойств электроприводов, кинематики вращения корпуса, алгоритмов формирования управляющих напряжений, гироскопических моментов вращающихся роторов (винтов) и внешних периодических возмущений. Z/ Z1 F3 3 A3 4 m3g rOAi 2 rCAi F2 C A2 Z rOC A4 m4g C mC g m2g O Y Y1 C F1 F4 1 X A1 H g m 1 1 X1 Рис. 1. Расчетная схема электромеханической системы Для получения математической модели, рассмотрим рис.1, на котором представлена расчетная схема. Рассматриваемая система движется в пространстве под действием сил, создаваемых вращающимися винтами и 7 силами веса и силами внешнего возмущения. Проекции угловой скорости корпуса связаны с углами Эйлера-Крылова с помощью кинематических уравнений. Рассмотрев расчетную схему, запишем равенство: ( 0) ( 0) ( 0) , (1) rOA rOC rCA i ( 0) rCA i где i (1) T10 rCA . i (2) (1) Векторы rCA для точек Ai имеют вид: i (1) rCA 1 l 0 , 0 0 l , 0 (1) rCA 2 (1) rCA 3 l 0 ( 1 ) 0 , rCA l i 0 0 (3) Скорости точек Ai определим, продифференцировав равенство (2) по времени: A i ( 0) rOA i dt ( 0) rOC dt ( 0) rCA i (4) dt Тогда, с учетом равенства (4) получим: (1) A C T10 rCA i i (5) (6) Система дифференциальных уравнений (6), дополняется системой уравнений, описывающей электрические и механические свойства электропривода, кинематическими уравнениями, связывающими проекции угловой скорости и углы Эйлера, а также алгоритмом определения управляющих электрических напряжений по величине отклонения реальных значений обобщенных координат от заданных. Полученная система дифференциальных уравнений описывает изменение обобщенных координат , определяющих положение центра масс коптера и его ориентацию в пространстве под действием сил тяги, сил веса и сил внешнего воздействия. 8 Рис.2 Схема определения моментов Определение моментов, действующих на корпус квадрокоптера, произведем по формулам (рис.2): Условие начало полета можно изобразить с помощью схемы (рис.3): Дифференциальные уравнения (2.32) Нет Да Рис.3 Схема алгоритма определения взаимодействия робота с опорной поверхностью Выберем закон изменения вертикальной координаты робота в виде гладкой дифференцируемой функции, удовлетворяющей условиям, что в начале и в конце подъема вертикальная скорость робота равна нулю. Пусть 9 Примем, что: (7) Постоянные a,b,c определяются из граничных условий. Рассмотрим алгоритм управления движением квадрокоптера по высоте. Будем считать, что коптер должен подниматься вверх по закону (7), определенному выше. В качестве управляемой величины примем высоту коптера, величину которой будем определять с помощью бортового бародатчика. Это значение будем сравнивать с высотой , определяемой по формуле (7) расчетным путем с помощью бортовой ЭВМ. Появление отклонения между действительной и расчетной высотой является поводом для изменения управляющего напряжения . Примем, что управляющее напряжение изменяется пропорционально отклонению, тогда управляющие напряжения можно определить по формулам: Ориентацию робота в пространстве задают углы которые контролируются следующим алгоритмом: 1) 2) 3) В третьей главе представлены результаты исследования различных режимов движения коптера, выполненные на основе разработанной ранее математической модели движения робота по заданной траектории. Определены параметры восстанавливающих моментов обеспечивающих минимальные отклонения коптера для ПИД- регулятора и для нелинейного логического регулятора при наличии, как внешних периодических возмущающих воздействий, так и без них, описан режим автономного движения робота из нулевых начальных условий, по горизонтальной плоскости, посадки и предложен алгоритм управления робота. В основе проводимых исследований лежит численный анализ системы 10 дифференциальных уравнений движения коптера, полученных во второй главе. Описание динамических режимов движения квадрокоптера возможно при учете алгоритмов управления формируемых системой автоматического управления. Источником управляющих воздействий являются электрические напряжения, формируемые многоканальным регулятором имеющим четыре входа и шесть выходов. Для использования робота в автономном режиме, в системе управления задается траектория движения. Определяются точки, в которых коптер зависает, в автоматическом режиме, осуществляя мониторинг и другие технологические операции. При этом, важно обеспечить минимальное отклонение корпуса робота от заданной ориентации в пространстве (рис.5 – 8). z z1 Ai C y1 x1 O y Рис. 4 Расчетная схема квадрокоптера x 11 Рис.5 Зависимость амплитуды вынужденных колебаний от величины коэффициента усиления пропорционального регулятора Рис. 6 Зависимость угловой скорости несущего винта квадрокоптера от времени Рис. 7 График угла поворота квадрокоптера 12 Рис. 8. График напряжения питания U2 Далее разработана математическая модель, описывающая движение навесного оборудования, закрепленного на квадрокоптере с помощью трехкоординатной упруго-вязкой подвески так, как это изображено на рис. 9. Рис. 9. Расчетная схема движения навесного оборудования Будем считать, что навесное оборудование моделируется материальной точкой массой m. После соответствующих преобразований получим векторное уравнение, описывающее пространственное движение: 13 Для решения полученной системы дифференциальных уравнений разработан специальный алгоритм, позволивший построить амплитудночастотную характеристику навесного оборудования, приведенную на рис.10, 11. Для определения конструктивных параметров кронштейна подвеса навесного оборудования, использована методика расчета, основанная на программном комплексе SolidWorks. 0.0045 0.004 амплитуда, м 0.0035 0.003 x 0.0025 y 0.002 z 0.0015 0.001 0.0005 0 0 5 10 15 20 25 частота, ω1=ω2=ω3 30 35 40 Рис.10. Амплитудо-частотная характеристика Рис.11. Схема деформации кронштейна в вертикальном направлении 14 В четвертой главе построена математическая модель робота с четырьмя электроприводами, с учетом кинематики вращательного движения, алгоритмов формирования управляющих напряжений, внешнего периодического воздействия, проведено моделирование движения робота по винтообразной пространственной траектории. Определены требования, и обосновывается структура системы слежения за траекторией. 7 4 1 6 3 2 5 Рис. 12. Общий вид установки для измерения боковой силы: 1 – пропеллер; 2 – двигатель; 3- драйвер двигателя; 4 – управляющая плата Freeduino; 5 – подшипниковый узел; 6 – ось вращения; 7 – крепление измерительного прибора Рис. 13. Общий вид несущей рамы с подвижной однокоординатной платформой , обеспечивающей поворот видеокамеры 15 30 2 44 res 20 21 res 1 10 0 0 10 20 0 res 30 40 Рис. 14. Зависимость перемещения квадрокоптера относительно оси z. 1-теория, 2- эксперимент kx=0,01, ky=0,01, kz=10 0.5 44 res 1 t=29,7 21 res 0 2 29.6 29.8 0 res 30 Рис. 15. Зависимость перемещения квадрокоптера относительно оси z. Приземление квадрокоптера (t =29.7 c) 1-теория, 2- эксперимент Разработана методика экспериментальных исследований, выполненных на базе экспериментального робота. Описываются основные блоки его структуры, строится система автоматического управления, формулируются принципы и разрабатывается система локальной навигации. Разработана математическая модель упругого элемента в подвеске навесного оборудования. Определена величина деформации трехкоординатного упругого элемента, как в статических, так и динамических условиях. 16 В заключении приведены основные результаты диссертации, полученные в результате выполненных теоретических и экспериментальных исследований. ОСНОВНЫЕ ВЫВОДЫ И РЕЗУЛЬТАТЫ На основе проведенных исследований и обобщений в диссертации получены следующие научные и практические результаты: 1.Проведен анализ и научно-обоснована возможность применения мобильных роботов с изменяемым направлением вектора тяговых усилий для перемещения в воздушной среде 2.Предложена схема квадрокоптера с учетом изменения направления вектора тяговых усилий приводов. Сконструирована и изготовлена модель квадрокоптера; 3.Разработана математическая модель с учетом пространственного движения фюзеляжа коптера, свойств бесколлекторных электродвигателей связанных с винтами с помощью редуктора и взаимодействия винтов с воздушной средой; 4.Предложен алгоритм решения системы дифференциальных уравнений описывающих движение квадрокоптера с учетом свойств электропривода и получена область параметров, определяющих оптимальную работу приводов квадрокоптера в различных режимах. 5.Разработан программный комплекс, позволяющий определить конструктивные параметры квадрокоптера и параметры регулятора системы управления в зависимости от задаваемых исходных параметров навесного оборудования. 6.Изучены основные закономерности движения мобильной многозвенной системы в режимах вертикального взлета, посадки движения по заданной траектории. 7.Выполнен анализ динамических эффектов, возникающих при движении квадрокоптера, установлены зависимости конструктивных параметров робота на характер движения 8.Разработаны конструкции и построены макеты квадрокоптера и различных и различных способов подвеса навесного оборудования , проведены натурные испытания, подтвердившие адекватность построенных математических моделей. Требования к техническим характеристикам, которые были заявлены в техническом задании были достигнуты. Время автономной работы порядка 15 минут. Величина полезной нагрузки около 1 кг. Высота полета превышает поставленные требования и достигает величину более 10- 12 метров. Скорость полета более 1м/с. 17 Основное содержание диссертации изложено в следующих работах: Публикации в рецензируемых научных журналах и изданиях 1. Попов Н. И., Емельянова О.В., Яцун С., Ф., Савин А.И. Исследование колебаний квадрокоптера при внешних периодических воздействиях // Фундаментальные исследования, №1, 2014. -С.28-32. 2. Попов Н.И., Емельянова О.В. Динамические особенности мониторинга воздушных линий электропередачи с помощью квадрокоптера // Современные проблемы науки и образования. – 2014. – № 2; URL: http://www.science-education.ru/116-12773 (дата обращения: 16.04.2014). URL: www.science-education.ru/ 3. Попов Н. И., Емельянова О. В., Яцун С. Ф., Савин А. И. Исследование движения квадрокоптера при внешнем периодическом воздействии «Справочник. Инженерный журнал» (с приложением). с.17-21. 4. Попов Н.И., Емельянова О.В., Яцун С.Ф., Савин А.И. Исследование колебаний квадрокоптера при внешних периодических воздействиях // Фундаментальные исследования. – 2014. – № 5 . – стр. 18-21; Другие публикации 5. Емельянова О.В., Попов Н. И., Яцун С. Ф. Моделирование движения квадроротационного летающего робота //Актуальные вопросы науки. Материалы VIII Международной научно-практической конференции. Москва, Спутник+. 2013. C.6-8. 6. Емельянова О.В., Попов Н. И., Яцун С. Ф. Моделирование движения квадрокоптера в пространстве // Авиакосмические технологии (АКТ-2013). Труды XIV Всероссийской научно-технической конференции и школы молодых ученых, аспирантов и студентов. Воронеж: ООО Фирма «Элист», 2013. C.131-138. 7. Гусельников А.И., Попов Н.И. Проблемы применения беспилотных летательных аппаратов в гражданских целях. //Современные технологии обеспечения гражданской обороны и ликвидации последствий стихийных бедствий: сборник статей по материалам всероссийской научнопрактической конференции с международным участием 19 апреля 2013г./ ФГБОУ ВПО Воронежский институт ГПС МЧС России. – Воронеж, 2013. – 404с. С.240-242. 8. Попов Н.И., Ефимов С.В. Актуальность использования беспилотных летательных аппаратов в МЧС России и в Воронежской области // Проблемы безопасности при ликвидации последствий чрезвычайных ситуаций. Материалы II всероссийской научно-практической конференции с международным участием, 19 декабря 2013 г.: в 2 ч. Ч. 1/ ФГБОУ ВПО Воронежский институт ГПС МЧС России. – Воронеж,2013. – 456с. С.386389. 9.Емельянова О. В., Яцун С. Ф., Попов Н. И., Савин А.И. Исследование влияния динамических параметров на характер колебаний беспилотных летательных аппаратов / Материали за X Международна научна практична 18 конференция «Бъдещите изследвания - 2014» (17 - 25 февруари, 2014). Том 46. Технологии. София. «Бял ГРАД-БГ» ООД.- С.32-40. 19 Подписано в печать 20.05.14. Формат 60х84 1/16. Бумага офсетная. Печ. л. 1,0. Тираж 130 экз. Заказ __. Юго-Западный государственный университет. 305040, г. Курск, ул. 50 лет Октября, 94. Отпечатано в ЮЗГУ