УДК 621.311
реклама

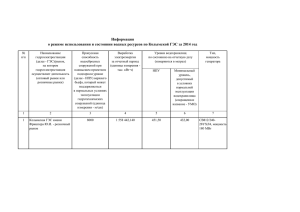
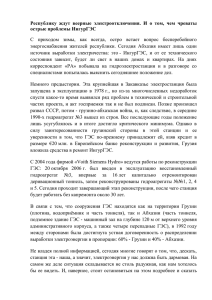
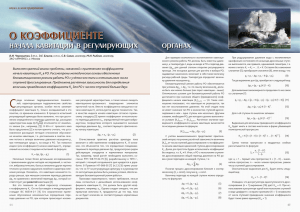
ВЕСТНИК ГИУА. СЕРИЯ “ЭЛЕКТРОТЕХНИКА, ЭНЕРГЕТИКА”. 2013. Вып. 16, №2 _ УДК 621.311 В.С. САФАРЯН, Г.Т. ГНУНИ ОПТИМИЗАЦИЯ РЕЖИМОВ ГИДРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ МЕТОДОМ СЕПАРАБЕЛЬНОГО ПРОГРАММИРОВАНИЯ Рассматривается задача оптимального управления режимами гидроэнергетической системы с учетом нелинейных расходных характеристик и зон кавитации. Для решения задачи используется метод сепарабельного программирования. Ключевые слова: сепарабельное программирование, расходные характеристики, зоны кавитации, целевая функция, кусочно-линейная аппроксимация. Введение. Нелинейные оптимизационные задачи, как правило, не имеют общих подходов решения, и часто не удается найти даже локальное решение из-за неприемлемости времени или же расходимости итерационного процесса [1]. Для ряда специфических нелинейностей (квадратичная, сепарабельная, дробно-линейная) разработаны подходы, позволяющие использовать модифицированный симплексный метод [2, 3]. Идея заключается в построении задачи на условный минимум (дополнительные ограничения), которая является линейной аппроксимацией исходной задачи. При аппроксимации размер задачи возрастает, однако поскольку в качестве метода решения используется вариант симплексного метода, данный алгоритм имеет практическую ценность. Постановка задачи. Требуется обеспечить экономически и технически выгодные режимы работы каскада ГЭС, сохраняя гидротехнические и станционные ограничения. Критериями экономической и технической целесообразности являются: а) минимизация объема водосброса ГЭС при обеспечении максимальной выработки электроэнергии в условиях жестко заданного суточного графика попусков воды для нужд ирригации; б) минимизация разницы между заранее задаваемым оператором энергосистемы желаемым графиком и суммарным графиком активной мощности каскада ГЭС; в) выравнивание графика активной мощности любой ГЭС каскада (минимизация количества отключений станций). 1. Гидротехнические ограничения: пропускная способность деривационных каналов; 84 максимальный и минимальный объемы водохранилищ и бассейнов суточного регулирования (БСР); жесткое задание попусков воды на ирригацию в соответствии с заранее задаваемыми суточными заявками объема воды и экологическими нормами; санитарные нормы в руслах рек; время запаздывания водного потока в руслах рек и деривационных каналах; потери воды; обеспечение уровня воды в водохранилищах и БСР в требуемое время суток. 2. Ограничения по ГЭС: нелинейные расходные характеристики ГЭС; зоны кавитации; расход воды в холостом режиме; максимальная мощность станции. Результаты и их обсуждение. Ход решения задачи иллюстрируется на примере гидротехнической системы, представленной на рис.1. Q3 Q1 I водохранилище x1 Q2 II ∆t1 БСР x2 ∆t2 y1 y2 Рис. 1. Схематическое изображение гидротехнической системы На рис. 1 приняты следующие условные обозначения: I, II – гидроэлектростанция; x1, y1 – потоки воды (м3/с) в начале и конце первого деривационного канала; x2, y2 – потоки воды в начале и конце второго деривационного канала; ∆t1, ∆t2 – время запаздывания в деривационных каналах; Q1, Q2 – попуски воды на ирригацию; Q3 – приток воды в БСР. Для БСР примем следующие обозначения: Vmin, Vmax – максимальные и минимальные объемы БСР; V – текущий объем воды БСР. Из вышеупомянутых величин x1, y1, x2, y2, Q1, Q2, Q3, V рассматриваются как функции времени. В качестве расчетного отрезка времени принимаются сутки, которые делятся на 48 дискретных интервалов (∆t) длительностью 0,5 ч каждый для учета минимального времени запаздывания. Найдем оптимальный расход Q0, при котором получается максимальное значение КПД. 85 На рис. 2 приведены расходная характеристика (P(Q)), идеальная (потенциал) расходная характеристика (P*(Q)) и кривая КПД станции. P*(Q) P P(Q) η(Q) Q 0 Qmin Qmax Q0 Рис. 2. Расходная характеристика станции и кривая КПД по мощности КПД станции равен 𝜂 𝑄 = 𝑃 𝑄 𝑃∗ 𝑄 , (1) 𝑃∗ 𝑄 = 𝑘𝑄. (2) где ∗ В то же время 𝑃 рaвен 𝑚𝑔 𝜌𝑣𝑔 (3) = = 𝜌𝑔𝑄, 𝑡 𝑡 где 𝜌 – плотность воды (кг/м3); v – объем воды (м3); g – ускорение свободного падения (м/с2); h – напор (м). Из уравнения (3) следует, что поток воды равен (4) 𝑄 = 𝑣 𝑡. После подстановки уравнения (3) в (2) получим, что коэффициент k определяется выражением (5) 𝑘 = 𝜌𝑔, 3 ∗ где k – угловой коэффициент прямой 𝑃 𝑄 (МВтс/м ). Наконец, подставляя (2) в выражение (1), получим (6) 𝜂 𝑄 = 𝑃 𝑄 𝑘𝑄 , где η – КПД станции при потоке воды Q. Для определения экстремума функции (6) следует приравнять нулю ее производную, то есть 𝑃∗ = 86 𝑃′ 𝑄 𝑘𝑄 − 𝑘𝑃 𝑄 (7) = 0. 𝑘 2 𝑄2 Решением уравнения (7) является значение аргумента (оптимальный расход воды): 𝑃 𝑄 (8) 𝑄0 = ′ . 𝑃 𝑄 Из выражения (8) следует, что при расходной характеристике, представленной на рис. 2, касательная в точке (Q0, P(Q0)) проходит через начало координат. Поскольку поставленная выше задача нелинейна (расходные характеристики станций, а также требования учета зоны кавитации приводят к нелинейностям), то для ее решения применяем метод сепарабельного программирования [2, 3]. Рассмотрим кусочно-линейную аппроксимацию расходной характеристики Pi(Qi) i-й станции (рис. 3) (для простоты изложения индекс i опустим). 𝜂′ 𝑄 = P P(Q) Q A 0 Q1 Q3 Q2 Q4 Q5 Рис. 3. Кусочно-линейная аппроксимация расходной характеристики Расходная характеристика P(Q) заменяется ломаной, приведенной на рис. 3, где интервал [Q3, Q4] представляет зону кавитации, задаваемой изготовителем. В общем случае интервал Q ∈ [Q min , Q max ] точками 0 ≤ Q1 < Q 2 < Q 3 < ⋯ < Q k (Q1 = Q min , Q k = Q max ) разбивается на k подынтервалов, и любое значение Q определяется в виде средневзвешенной Qi: 𝑘 𝑄= 𝑤𝑖 𝑄𝑖 , (9) 𝑖=1 где wi (дополнительные искомые) удовлетворяют условию 𝑘 𝑤𝑖 = 1, 𝑤𝑖 ≥ 0, 𝑖 = 1, 𝑘 . 𝑖=1 87 (10) При этом расходная характеристика заменяется ее кусочно-линейной аппроксимацией: 𝑘 𝑃 𝑄𝑖 ∙ 𝑤𝑖 . 𝑖=1 Для построения аппроксимированной модели переменная Q заменяется на правую часть (9), а функция P(Q) заменяется ее кусочно-линейной аппроксимацией. Система ограничений задачи дополняется условием (10). Задача решается модифицированным симплексным методом, который отличается от классического метода правилом ограниченного ввода в базис [2]. Модель задачи в [4] приведена для линейной расходной характеристики. Модифицируем ее для случая кусочно-линейной аппроксимации. Линейные ограничения для водотоков, водохранилищ, БСР и станций (рис.1) в виде равенств имеют следующий вид: 𝑚1 𝑤𝑖′ 𝑡 − ∆𝑡1 ∙ 𝑄𝑖′ − 𝑦1 𝑡 = 𝑄1 𝑡 , 𝑖 = 1, 𝑡𝑚 , 𝑡 = 𝑖 ∙ ∆𝑡 , (11) 𝑤𝑖′′ 𝑡 − ∆𝑡2 ∙ 𝑄𝑖′′ − 𝑦2 𝑡 = 𝑄2 𝑡 , 𝑖 = 1, 𝑡𝑚 , 𝑡 = 𝑖 ∙ ∆𝑡 , (12) 𝑖=1 𝑚2 𝑖=1 𝑉 𝑡 − 𝑉(𝑡 − ∆𝑡) − 𝑦1 𝑡 + 𝑥2 𝑡 = 𝑄3 𝑡 , 𝑖 = 1, 𝑡𝑚 , 𝑡 = 𝑖 ∙ ∆𝑡 , ∆𝑡 (13) 𝑚1 𝑤𝑖′ 𝑡 = 1 , 𝑖=1 𝑚2 𝑤𝑖′′ 𝑡 = 1 , 𝑖=1 𝑤𝑖′ 𝑤𝑖′′ 𝑡 ≥ 0 , 𝑖 = 1, 𝑚1 , 𝑡 ≥ 0 , 𝑖 = 1, 𝑚2 , где m1, m2 – число интервалов разбиения расходных характеристик станций; 𝑤𝑖′ , 𝑄𝑖′ (𝑤𝑖′′ , 𝑄𝑖′′) – дополнительные искомые и точки разбивки (рис. 3) для первой (второй) станции; ∆t – время запаздывания ∆𝑡 ≤ 𝑚𝑖𝑛(∆𝑡1, ∆𝑡2 ) ; 𝑡𝑚 = 𝑇 ∆𝑡 (T – расчетный период). В уравнениях (11) и (12) принимаются следующие значения переменных y1 и y2 при 𝑡 − ∆𝑡1 ≤ 0 и 𝑡 − ∆𝑡2 ≤ 0: 𝑦1 𝑡 − ∆𝑡1 = 𝑦1∗ 𝑡 − ∆𝑡1 + 𝑇 , 𝑦2 𝑡 − ∆𝑡2 = 𝑦2∗ 𝑡 − ∆𝑡2 + 𝑇 , где величины 𝑦1∗ и 𝑦2∗ известны из результатов предыдущих расчетных периодов. 88 Аналогичным образом принимается значение величины 𝑉(𝑡 − ∆𝑡) в момент t=∆t (𝑉 0 = 𝑉 ∗ (𝑇)), где 𝑉 ∗ – известный из результатов предыдущих расчетов объем БСР. Линейные ограничения в виде неравенств имеют следующий вид: 𝑚1 𝑤𝑖′ 𝑡 ∙ 𝑄𝑖′ ≤ 𝑥1𝑚𝑎𝑥 , 𝑡 = 1, 𝑡𝑚 , 𝑥1𝑚𝑖𝑛 ≤ (14) 𝑖=1 𝑦1𝑚𝑖𝑛 ≤ 𝑦1 𝑡 ≤ 𝑦1𝑚𝑎𝑥 , 𝑡 = 1, 𝑡𝑚 , (15) 𝑚2 𝑤𝑖′′ 𝑡 ∙ 𝑄𝑖′′ ≤ 𝑥2𝑚𝑎𝑥 , 𝑡 = 1, 𝑡𝑚 , 𝑥2𝑚𝑖𝑛 ≤ (16) 𝑖=1 𝑦2𝑚𝑖𝑛 ≤ 𝑦2 𝑡 ≤ 𝑦2𝑚𝑎𝑥 , 𝑡 = 1, 𝑡𝑚 , 𝑉𝑚𝑖𝑛 ≤ 𝑉 𝑡 ≤ 𝑉𝑚𝑎𝑥 , 𝑡 = 1, 𝑡𝑚 , (17) (18) 𝑘1 𝑃1 𝑡 ≤ 𝑤𝑖′ (𝑡) ∙ 𝑃1 (𝑄𝑖′ ) , 𝑡 = 1, 𝑡𝑚 , (19) 𝑤𝑖′′ (𝑡) ∙ 𝑃2 (𝑄𝑖′′ ) , 𝑡 = 1, 𝑡𝑚 , (20) 𝑖=1 𝑘2 𝑃2 𝑡 ≤ 𝑖=1 где 𝑥1𝑚𝑖𝑛 , 𝑥1𝑚𝑎𝑥 , 𝑦1𝑚𝑖𝑛 , 𝑦1𝑚𝑎𝑥 , 𝑥2𝑚𝑖𝑛 , 𝑥2𝑚𝑎𝑥 , 𝑦2𝑚𝑖𝑛 , 𝑦2𝑚𝑎𝑥 , 𝑉𝑚𝑖𝑛 , 𝑉𝑚𝑎𝑥 – минимальные и максимальные значения соответствующих величин; 𝑃1 𝑡 , 𝑃2 𝑡 – искомые графики мощностей станций. Вводя свободные переменные и заменяя ограничения (14) - (20) эквивалентными уравнениями, ограничения (11) - (20) в матричной форме можно представить следующим образом: (21) 𝐴𝑋 = 𝑏, где A - матрица коэффициентов ограничений; b - вектор-столбец, состоящий из правых частей ограничений; X - вектор-столбец неизвестных. Обратимся к формированию целевой функции. Объем водосброса ГЭС V0 определяется по выражению 2 𝑡𝑚 𝑉0 = ∆𝑡 𝑋𝑖 𝑡 − 𝑃𝑖 (𝑡)/𝐾𝑖 , 𝑖=1 𝑡=1 где Ki – угловой коэффициент соответствующего участка линеаризированной расходной характеристики (рис. 3). Таким образом, математическая модель задачи линейного программирования примет вид 89 𝑉0 → 𝑚𝑖𝑛, (22) 𝐴𝑋 = 𝑏, 𝑋 ≥ 0. Если после реализации модели (22) выясняется, что она имеет альтернативные решения, то формируется новая задача линейного программирования, дополняя систему ограничений уравнением 𝑉0 = 𝑉0𝑚𝑖𝑛 , где 𝑉0𝑚𝑖𝑛 – значение целевой функции задачи (22). Рассмотрим формирование целевой функции 𝛼0 , где в качестве критерия принимается сходство видов графиков функции суммарной активной мощности ГЭС (𝑃 𝑡 = 𝑃1 𝑡 + 𝑃2 𝑡 , 𝑡 = 1, 𝑡𝑚 ) с заранее заданной желаемой функцией 𝑃0 𝑡 , 𝑡 = 1, 𝑡𝑚 , описываемой соотношением 𝛼0 𝑡 = 𝑃0 (𝑡)/𝑃𝑚𝑎𝑥 , где 𝑃𝑚𝑎𝑥 = 𝑚𝑎𝑥 𝑃0 𝑡 , 𝑡 = 1, 𝑡𝑚 и 𝑡𝑚𝑎𝑥 – соответствующий момент значения 𝑃𝑚𝑎 𝑥 . В этом случае целевая функция примет следующий вид: 𝑡𝑚 𝑃 𝑡 − 𝛼0 𝑡 𝑃(𝑡𝑚𝑎𝑥 ) → 𝑚𝑖𝑛 . (23) 𝑡=1 Целевая функция (23) нелинейна, но вводом дополнительных переменных и линейных ограничений ее можно представить в линейном виде. Существуют величины 𝑑 𝑡 ≥ 0, 𝑡 = 1, 𝑡𝑚 такие, что (24) 𝑃 𝑡 − 𝛼0 𝑡 𝑃(𝑡𝑚𝑎𝑥 ) ≤ 𝑑 𝑡 , 𝑡 = 1, 𝑡𝑚 . Обозначая 𝑑𝑚 = 𝑚𝑎𝑥 𝑑 𝑡 , 𝑡 = 1, 𝑡𝑚 , представим (24) следующим образом: (25) 𝑃 𝑡 − 𝛼0 𝑡 𝑃(𝑡𝑚𝑎𝑥 ) ≤ 𝑑𝑚 , 𝑡 = 1, 𝑡𝑚 . Нелинейную систему (25) заменим эквивалентной системой линейных неравенств: 𝑃 𝑡 − 𝛼0 𝑡 𝑃 𝑡𝑚𝑎𝑥 ≤ 𝑑𝑚 , 𝑡 = 1, 𝑡𝑚 , (26) −𝑃 𝑡 + 𝛼0 𝑡 𝑃 𝑡𝑚𝑎𝑥 ≤ 𝑑𝑚 , 𝑡 = 1, 𝑡𝑚 . Таким образом, получим новую задачу линейного программирования в виде следующей математической модели: 𝑑𝑚 → 𝑚𝑖𝑛 , 𝐴𝑋 = 𝑏 , 𝑉0 = 𝑉𝑚𝑖𝑛 , (27) 𝑃 𝑡 − 𝛼0 𝑡 𝑃 𝑡𝑚𝑎𝑥 ≤ 𝑑𝑚 , 𝑡 = 1, 𝑡𝑚 , −𝑃 𝑡 + 𝛼0 𝑡 𝑃 𝑡𝑚𝑎𝑥 ≤ 𝑑𝑚 , 𝑡 = 1, 𝑡𝑚 , 𝑑𝑚 ≥ 0 , 𝑋 ≥0. Если после реализации модели (27) выясняется, что она имеет альтернативные решения, то формируется новая задача с новой целевой функцией по вышеприведенным суждениям. 90 Выводы. Для решения задачи оптимизации режимов гидротехнической энергосистемы с учетом линейных расходных характеристик и зоны кавитации станции используется метод сепарабельного программирования. Учитываются как гидротехнические ограничения, так и ограничения, налагаемые на гидроэнергостанции. Рассматривается многокритериальная задача, которая моделирована на языке “Delphi 7” и позволяет учесть и выполнять расчеты при различных вариантах ранжировки критериев. СПИСОК ЛИТЕРАТУРЫ 1. 2. 3. 4. Винеровские чтения / Труды IV Всероссийской конференции. – Иркутск: Изд-во ИрГТУ, 2011. – Часть I. – 313 с. Вагнер Г. Основы исследования операций. – М.: Изд-во Мир, 1973. – 335 с. Таха Х. Исследование операций. – М.: Изд-во Мир, 2005. – 912с. Материал поступил в редакцию 09.06.2013. V.S. SAFARYAN, H.T. GNUNI OPTIMIZING THE HYDROPOWER SYSTEM OPERATION MODES BY THE METHOD OF SEPARABLE PROGRAMMING The problem of optimal control of the hydropower system modes is considered taking into consideration the nonlinear consumption characteristics and cavitation zones. The method of separable programming is applied to solve the problem. Keywords: separable programming, consumption characteristics, cavitation zones, target function, partial-linear approximation. 91