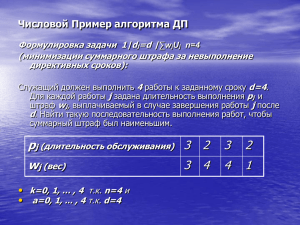
А.Л.Штраус Задача оптимизации наблюдений временно
реклама

А. Л. Ш т р а у с (Ульяновск, УлГУ). Задача оптимизации наблюдений
временно ненаблюдаемых систем.
В работе, представленной данным сообщением, рассматривается частично наблюдаемый случайный двумерный процесс, причем попеременно наблюдаются то
первая, то вторая компоненты. За смену промежутков наблюдаемости отвечает пуассоновский процесс с заданной интенсивностью λ: каждый скачок пуассоновского процесса определяет переход к наблюдению следующей компоненты.
Исходный процесс восстанавливается по наблюдениям, при этом получаем оценку
частично наблюдаемого процесса и ошибку оценивания. Ставится задача оптимизации процедуры наблюдения в смысле минимизации частоты переключения промежутков наблюдения и одновременной минимизации ошибки оценивания.
Введем вспомогательные процессы и обозначения: Xt = (Xt1 , Xt2 )T — частично
наблюдаемый процесс, Yt = (Yt1 , Yt2 )T — наблюдения. Считаем, что Y1 периодически
позволяет наблюдать X1 , Y2 периодически позволяет наблюдать X2 , но в различные
промежутки времени. Запишем это P
формально, вводя в рассмотрение пуассоновский
λ
процесс с интенсивностью λ: πtλ = ∞
i=1 I{t 6 τi }, где τi = inf{t: t > 0, πt = j} —
λ
моменты скачков процесса πt . Переключения
R описываются
R процессом телеграфного
типа, порождаемым процессом πtλ : Nt = 1 − 0t Ns− dπsλ + 0t (1 − Ns− ) dπsλ . При этом
0
Nt ∈ {0, 1}. Обозначим Bt матрицу N0t 1−N
управления наблюдениями. Процесt
с Xt предполагается двумерным процессом Орнштейна–Уленбека, Yt — процессом,
производные компонент которого в различные промежутки времени совпадают с компонентами процесса Xt . После регуляризации модели для осуществления процедуры
классической фильтрации приходим к системе
dXt = −Xt dt + dWt ,
dYtε = −Bt Xt dt +
1
dW t .
ε
Здесь Ytε — вспомогательный процесс, производная которого отличается от Yt наличием регуляризующей компоненты (1/ε)dW t , ε → ∞. Процессы πtλ , Wt , W t попарно независимы. Теперь можно перейти к построению оценки процесса Xt по схеe t = E (Xt |F Y,π ) — оценка частично наблюдаемого процесса,
ме Калмана. Пусть X
e t )(Xt − X
e t )T — ошибка оценивания.
γt = E (Xt − X
Утверждение 1. Существует конечный limt→∞ {E Trγt }.
Положим F (λ) = limt→∞ {E Trγt } + λ. Тогда задача минимизации частоты переключения промежутков наблюдения и одновременной минимизации ошибки оценивания принимает следующий вид: F (λ) → minλ , λ > 0.
Утверждение 2. Существует λопт = arg minλ F (λ).
Утверждение 3. Функция потерь F (λ) имеет следующий вид:
s
F (λ) = λ −
λ
+ 1.
λ+2
Функция F (λ) выпукла вверх и имеет единственный локальный минимум, который находится численно. Значение λ, доставляющее локальный минимум функции
F (λ), и есть решение задачи оптимизации.
Автор выражает благодарность А. А. Бутову за внимание к работе.
СПИСОК ЛИТЕРАТУРЫ
1. Липцер Р.Ш., Ширяев А.Н. Статистика случайных процессов (нелинейная фильтрация и смежные вопросы). M.: Наука, 1974, 696 с.