Н. В. Громков УСЛОВИЯ МИНИМИЗАЦИИ ПОРОГА ЧУВСТВИТЕЛЬНОСТИ УСИЛИТЕЛЕЙ ПОСТОЯННОГО ТОКА С ПЕРИОДИЧЕСКОЙ КОРРЕКЦИЕЙ
реклама

№ 2, 2008
Технические науки. Электроника, измерительная и радиотехника
УДК 621.317
Н. В. Громков
УСЛОВИЯ МИНИМИЗАЦИИ ПОРОГА ЧУВСТВИТЕЛЬНОСТИ
УСИЛИТЕЛЕЙ ПОСТОЯННОГО ТОКА
С ПЕРИОДИЧЕСКОЙ КОРРЕКЦИЕЙ
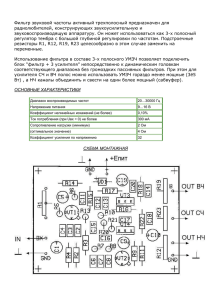
Рассматриваются вопросы минимизации порога чувствительности усилителей постоянного тока, применяемых наиболее часто в различных преобразователях информативных сигналов малого уровня, путем введения периодической коррекции погрешности нуля на основе предложенной автором математической модели и методики анализа влияния собственных шумов элементов схемы корректирующего канала.
При разработке преобразователей информативных сигналов малого
уровня с датчиков различных физических величин [1], выполненных на базе
операционных усилителей (ОУ) или усилителей постоянного тока (УПТ), в
частотно-временные сигналы появляется естественное желание минимизации
порога чувствительности данных преобразователей и уменьшения влияния
различных шумовых составляющих сигнала, связанных с действием внешних
дестабилизирующих факторов (температуры, вибраций, нестабильности напряжения питания и др.) [2], а также уменьшения влияния собственных шумов элементов схемы. Одним из способов устранения данной проблемы является введение корректирующего канала.
В работе [3] автором были предложены математическая модель и методика анализа влияния собственных шумов элементов схемы корректирующего канала с периодической коррекцией погрешности нуля УПТ на выходной
сигнал измерительных преобразователей, с помощью которых можно минимизировать порог чувствительности УПТ данного типа и снизить его примерно в 100 раз.
Воспользовавшись данной методикой, несложно определить соответствующие выражения для дисперсий составляющих шума. В самом общем случае задача минимизации порога чувствительности может быть решена как
задача оптимизации (минимизации) функции, представляющей собой сумму
всех приведенных в указанной выше работе дисперсий. При этом оптимизацию требуется осуществлять по следующим параметрам: GJ – спектральной
плотности белого шума источника входного тока ОУ; GEдр – спектральной
плотности белого шума источника смещения нуля ОУ; τу – постоянной времени ОУ (или постоянной времени корректирующего канала); R1 и R2 – размерам сопротивлений в цепи обратной связи ОУ, определяющим коэффициент передачи усилителя; С – размеру запоминающей емкости; R – сопротивлению в цепи заряда запоминающей емкости С; Т1 и Т2 – параметрам управляющего генератора импульсов ГИ; ωс = 1/τ – частоте среза фликкер-шума.
В настоящей работе исследованы условия минимизации порога чувствительности с учетом тoгo, что значения большинства из перечисленных выше параметров в реальных схемах изменяются в узких пределах, и, кроме того, соотношения между параметрами в формулах, приведенных в табл. 1, остаются постоянными.
97
Известия высших учебных заведений. Поволжский регион
98
№ 2, 2008
Технические науки. Электроника, измерительная и радиотехника
Как показали исследования, в наименьшей степени от значений параметров схемы зависит составляющая случайной погрешности, обусловленная
нескомпенсированной частью фликкер-шума ОУ, которая характеризуется
дисперсией D2ф.ш{Eдр}. Значения нормированной дисперсии D2ф.ш{Eдр} при
τ =10–4 с соответствуют характерному значению частоты среза фликкер-шума
для ОУ порядка 1 кГц.
Вполне естественно потребовать выполнения условия, чтобы составляющие случайной погрешности, обусловленные влиянием фликкершума и белого шума в режиме запоминания, и составляющая, обусловленная
влиянием белого шума в режиме хранения, не превышали рассмотренной
выше случайной погрешности.
Нетрудно показать, что при реальных значениях параметров схемы указанное условие легко выполняется. Значения нормированной дисперсии:
D2б.ш Eдр D2ф.ш Eдр
D2б.ш Eдр D2б.ш Eдр / GEдр K к' 2 .
Для выполнения условия
(1)
необходимо по-
стоянную времени усилителя выбирать больше 10–4 с. При выполнении этого
же условия дисперсия D1б.ш{Eдр}, обусловленная влиянием белого шума в режиме запоминания, не будет превышать размера дисперсии D2ф.ш{Eдр}.
Значения нормированной дисперсии
D1ф.ш Eдр D1ф.ш Eдр / GEдр 1
2
R2
,
R1
(2)
R
(где полагается, что 1 2 K к' ), были вычислены при реальных значениR1
ях частот среза фликкер-шумов, равных 0,5; 1; 5 кГц, т.е. соответственно при
τ = 3,2 · 10–4 с; 1,6 · 10–4 с; 3,2 · 10–5 с.
Как следует из результатов анализа указанных выше формул, даже в
самом неблагоприятном случае дисперсия D1б.ш Eдр не превышает размера
дисперсий D2ф.ш Eдр . Для минимизации случайной погрешности, обусловленной шумовым напряжением операционного усилителя, достаточно ограничить его полосу пропускания на уровне 1 кГц, т.е. выполнить условие τ > 10–4 с.
Кроме того, указанную погрешность можно уменьшать выбором параметров
Т1 и Т2 генератора импульсов.
Для минимизации влияния токовых шумов на порог чувствительности необходимо, чтобы формулы для соответствующих дисперсий были
сопоставимы с формулами дисперсий для шумовых напряжений. Для решения этой задачи воспользуемся следующим соотношением, связывающим спектральную плотность напряжения со спектральной плотностью
шумового тока
GEдр GJ Rэ2 ,
(3)
где Rэ – некоторое эквивалентное сопротивление, падение напряжения на котором от шумового тока характеризуется спектральной плотностью GEдр .
99
Известия высших учебных заведений. Поволжский регион
Для реальных ОУ данное сопротивление можно вычислить по значениям соответствующих спектральных плотностей белого шума. В табл. 2 приведены примеры значений соответствующих спектральных плотностей и эквивалентных сопротивлений Rэ.
Таблица 2
Тип ОУ
GE , В2 / Гц
GJ , A 2 / Гц
RЭ , кОм
816УД1
7 1015
1024
80
816УД2
1012
1024
1000
140УД1
(5 50) 1017
2 1024
5 – 15
153УД1
(5 50) 1017
5 1026
30 – 100
153УД1
3,6 1017
1,6 1025
15
153УД2
3, 2 1016
1,6 1026
140
140УД7
4 1016
6, 25 1026
80
140УД6
1,6 1015
3,6 1027
670
μА741(140УД7)
4 1016
2 1025
45
LM301(553УД2)
2 1016
2 1026
100
Как показывает анализ, для выполнения условий
D2ф.ш Eдр Dб.ш J ,
D2ф.ш Eдр Dф.ш J ,
D2ф.ш Eдр D1б.ш J ,
D2ф.ш Eдр D1ф.ш J ,
(4)
помимо выполнения приведенной выше рекомендации (τ > 10 4 с), дополнительно требуется, чтобы выполнялось неравенство
R2
K к' 1
Rэ
R2
,
R1
(5)
которое практически накладывает ограничение на максимально допустимый
размер сопротивления в цепи отрицательной обратной связи ОУ.
Как показывают результаты анализа, доминирующей является составляющая погрешности, обусловленная протеканием токового фликкер-шума
через запоминающую емкость в режиме коррекции:
3υR 2 K к2GEдр T 2
2
D2ф.ш J
,
RЭ
T
1
где υ – некоторый коэффициент, равный 10 4 Гц.
100
(6)
№ 2, 2008
Технические науки. Электроника, измерительная и радиотехника
Для сравнения дисперсий D2ф.ш{J_} и D2ф.ш{Едр} представим последнюю в виде
D2ф.ш Eдр 13,6 104 GEдр K к2 ,
(7)
что позволяет записать условие минимизации порога чувствительности ОУ
R
T2
2,1 э .
(8)
T1
R
Полученное соотношение показывает, что для построения корректирующего канала лучше всего выбирать ОУ с большим размером Rэ.
На практике существует некоторое оптимальное значение скважности
импульсов управляющего генератора, поскольку, как следует из выражения
(6), с одной стороны, с увеличением скважности увеличивается порог чувствительности, а с другой стороны, при малых значениях скважности большое
влияние будет оказывать напряжение смещения нуля ОУ. Дисперсия данной
составляющей погрешности может быть оценена по формуле
E2 K 2
DEсм см к .
Q
(9)
Тогда оптимальное значение скважности Q T2/T1 определится как аргумент минимума функции D2ф.ш{J_, Q}+DЕсм{Q}. После соответствующих
преобразований получим
Qопт 3
2
Rэ2 Eсм
6υR 2GEдр
.
(10)
Как показывают расчеты, проведенные в соответствии с выражением
(10), оптимальный размер скважности лежит в диапазоне от 100 до 1000.
Следует отметить одно важное обстоятельство: порог чувствительности
УПТ с периодической коррекцией мало зависит от частоты управляющих
импульсов ГИ. На практике частоту ГИ следует выбирать не более 100 Гц,
что позволяет обеспечить высокое входное сопротивление УПТ (поскольку
T1 > 3RC) и уменьшить влияние коммутационных выбросов ключей. Вместе с
тем даже при выполнении всех приведенных выше рекомендаций, удается
снизить порог чувствительности УПТ лишь в 100 раз. Существенно лучшими
свойствами в этом плане обладают двухканальные УПТ.
Функциональная схема УПТ с коррекцией собственных шумов элементов
схемы на базе двух операционных усилителей, разработанная при участии автора, приведена на рис. 1. Схема содержит ключи Кл11, Кл12, Кл21, Кл22; конденсаторы С и С'; два резистора R и R'; два операционных усилителя 0У1 и 0У2; сумматор Σ и генератор импульсов ГИ, управляющий работой схемы.
Коррекция осуществляется следующим образом. С выхода ГИ поступают
в противофазе два сигнала, открывающие и закрывающие соответствующие
ключи. Например, в первый полупериод работы замыкаются ключи Кл11 и Кл22
и размыкаются Кл12 и Кл21. При этом операционный усилитель 0У1 усиливает
сумму напряжения ΔU, приложенного между инвертирующим («Вход_») и неинвертирующим («Вход+») входами усилителя, некоторого напряжения Uн на
конденсаторе С, а также собственного смещения (дрейфа) Едр1.
101
Известия высших учебных заведений. Поволжский регион
Выходное напряжение будет равно
U вых1 U U н Eдр1 K ОУ1K ,
(11)
где КОУ1 – коэффициент передачи операционного усилителя ОУ1; КΣ – коэффициент передачи сумматора напряжений Σ.
Рис. 1
В это же время (в результате замыкания ключа Кл22) операционный
усилитель ОУ2 охватывается стопроцентной отрицательной обратной связью
по постоянному току, что приводит к появлению между его инвертирующим
и неинвертирующим входами напряжения, равного погрешности напряжения
смещения Едр ОУ2, и конденсатор С через резистор R' заряжается до этого
напряжения.
Во второй полупериод работы ГИ замыкаются ключи Кл12 и Кл21 и размыкаются Кл21, Кл22. При этом в результате замыкания ключа Кл21 на входе
операционного усилителя ОУ2 произойдет компенсация напряжения смещения ЕдрОУ2 напряжением на конденсаторе С', который в течение предыдущего цикла был заряжен до напряжения, равного Едр ОУ2. Таким образом, выходное напряжение будет равно
U вых2 UK ОУ2 K ,
где KОУ2 – коэффициент передачи операционного усилителя ОУ2.
102
(12)
№ 2, 2008
Технические науки. Электроника, измерительная и радиотехника
Одновременно с этим происходит подготовка операционного усилителя
ОУ1 к следующему циклу работы, т.е. осуществляется заряд конденсатора С
до напряжения смещения Едр ОУ1.
В следующий полупериод работы операционный усилитель ОУ1 будет
усиливать лишь дифференциальный входной сигнал ΔU, т.к. произойдет коррекция погрешности смещения (дрейфа нуля).
Нетрудно показать, что данный УПТ представляет собой по сути дела
два параллельно включенных УПТ с периодической коррекцией, работающих
в противофазе. Поэтому воспользуемся полученными ранее результатами
оценки случайных погрешностей, обусловленных собственными шумами
элементов схемы, для анализа условий минимизации порога чувствительности двухканального УПТ. Очевидно, что в данном случае мы должны учитывать те составляющие погрешности, которые имеют место в УПТ с периодической коррекцией в режиме хранения, или коррекции. Перечислим эти
составляющие погрешности с учетом того, что ОУ1 и ОУ2 имеют идентичные шумовые характеристики.
1. Случайная погрешность, обусловленная шумовыми токами ОУ по
неинвертирующим входам, оценивается как
R22
GJ ,
2τ y
(13)
131R22
GJ .
22τ
(14)
Dб.ш J
Dф.ш J
2. Случайная погрешность, обусловленная шумовыми токами ОУ по
инвертирующим входам, оценивается с учетом равенства T1 T2 1/ 2 FГИ
выражениями
R22
GJ ;
2τ y
(15)
131R22
GJ ;
22τ
(16)
D1б.ш J
D1ф.ш J
1
1
2
F
D2б.ш J А 2GJ τ y
2τ 2y FГИ 1 e y ГИ
4 FГИ
D2ф.ш J
9
10
i 0
2i
1
2τ10i FГИ
FГИ 1 e
i 1
9 2τ10
;
(17)
А 2 τG J
66
1
2τ10i 1FГИ
i 1
2τ10 FГИ 1 e
, (18)
где FГИ – частота генератора импульсов ГИ.
103
Известия высших учебных заведений. Поволжский регион
3. Составляющая погрешности, обусловленная влиянием нескомпенсированного шумового напряжения, оценивается как
Dб.ш Eдр
K к2GEдр
1
1
2τ y FГИ
τ 2 FГИ 1 e
y
;
1
1
9
15K к2GEдр 10
i 1
10i 2τ10i FГИ
Dф.ш Eдр
e 2τ10 FГИ
11 2τFГИ
e
τ
99
i 0
(19)
. (20)
Как показал анализ, проведенный выше, доминирующими составляющими, ограничивающими порог чувствительности, являются D2ф.ш J
и D2ф.ш Eдр . Причем для их уменьшения требуется по возможности увеличивать частоту генератора импульсов. Однако практически существует некоторый оптимум частоты FГИ, наличие которого объясняется тем, что с увеличением частоты все большее влияние начинают оказывать выбросы напряжения, поступающие на вход усилителя по цепям управления ключами. Действительно, с одной стороны, для дисперсии случайной погрешности имеем
D1 υА 2GJ
1
2
4 FГИ
13,6 104 GEдр K к2 ,
(21)
т.е. приведенная ко входу УПТ дисперсия будет характеризоваться выражением
D1
υG J
2
4 FГИ
С2
13,6 104 GEдр .
(22)
В случае же воздействия на входе коммутационных выбросов по цепям
управления ключами имеет место составляющая
D2 2 FГИ
1/ FГИ
2t
2 τк
U к e dt ,
(23)
0
где Uк – амплитуда управляющих импульсов; τк – постоянная времени цепи
управляющих импульсов, которая практически зависит от размеров проходных и переходных емкостей электронных ключей и в первом приближении от
сопротивления замкнутого ключа.
Постоянную τк можно определить экспериментально. С учетом того,
1
что к
, имеем
2FГИ
D FГИ 2 FГИU к2 к ,
т.e. данная составляющая линейно зависит от частоты FГИ.
104
(24)
№ 2, 2008
Технические науки. Электроника, измерительная и радиотехника
Таким образом, оптимальное значение частоты генератора импульсов
FГИ ОПТ определяется как минимум функции D FГИ D1 FГИ D2 FГИ
и описывается выражением
FГИОПТ 3
υG J
4C 2U к2 к
.
(25)
Практически диапазон оптимальных значений FГИ лежит между частотами от 0,1 до 10 Гц, что следует из подстановки численных значений параметров реальных схем в выражение (25).
На основании изложенного можно сделать вывод, что наиболее перспективным с точки зрения достижения минимума порога чувствительности является корректирующий канал в виде поочередно корректируемых УПТ, для которых определены условия минимизации влияния собственных шумов элементов схемы, а на основании полученных данных (табл. 1 и выражения (13)–(20))
дана оценка случайных погрешностей для расчета порога чувствительности
корректирующего канала в виде УПТ с коррекцией погрешности нуля.
Список литературы
1. Г р о м к о в , Н . В. Преобразователи параметров резистивных датчиков в частотные сигналы / Н. В. Громков // Проблемы автоматизации и управления в технических системах. – Пенза : ПензГУ, 2007. – С. 128–129.
2. В а с и л ь е в , В. А . Уменьшение влияния дестабилизирующих факторов на информативный сигнал датчиков / В. А. Васильев // Датчики и системы. – 2002. –
№ 4. – С. 12–15.
3. Г р о м к о в , Н . В. Математическая модель и анализ влияния собственных шумов
элементов схемы корректирующего канала на выходной сигнал измерительных
преобразователей / Н. В. Громков // Известия высших учебных заведений. Поволжский регион. Технические науки. – 2007. – № 4. – С. 152–165.
105