Функциональные модели нейронов в приложении к задачам
реклама

СЛОЖНЫЕ ДИНАМИЧЕСКИЕ СЕТИ
В.И. НЕКОРКИН
ИПФ РАН, Нижний Новгород
•
•
•
•
•
•
•
•
•
•
Сложные статические сети
Сложные динамические сети
Основные свойства нейронов и нейронных систем
Волны и сложные паттерны в одномерных регулярных сетях
Двумерные локализованные структуры
Переключательная динамика в нейронной сети с адаптивными
возбуждающими связями
Модульные сети с возбуждающими связями и запаздыванием
Динамические
сети
глобально
связанных
фазовых
осцилляторов с адаптивными связями
Динамика сети фазовых осцилляторов с адаптивными связями
на случайных графах
Переключательная кластерная динамика в сетях с переменной
топологией
I. СЛОЖНЫЕ СТАТИЧЕСКИЕ СЕТИ
Сложные статические сети – это графы, содержащие большое число вершин (узлов)
•
•
•
•
Социальные сети;
Компьютерные сети, в частности, Интернет;
Сети цитирования;
Сети авиационных и железнодорожных линий;
Основные статические характеристики
• k – степень узла (вершины), т.е. число его
связей;
• l – средняя длина пути между узлами
(вершинами);
• распределение степеней узлов (вершин);
• C – коэффициент кластеризации;
• хабы – узлы сети с наибольшими степенями;
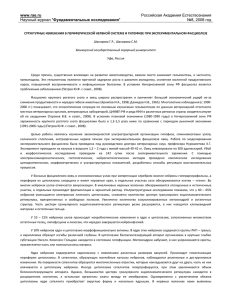
Сеть Интернет (Nature 406, 2000)
Связи между узлами сети задаются матрицей
смежности G, элементы которой
1, если между i и j - ым узлом
g ij есть соединение ;
0, если i и j не соединены.
Коэффициент кластеризации узла (вершины)
2 ei
ci
ki (ki 1)
ei
–
число
связей
между
узлами
непосредственно связанными с i – ым узлом;
1
C
N
Коэффициент
кластеризации сети
c
i
i
Пример: коэффициент кластеризации узла
1
k1 3
k2 2
2
e1
3
e2
4
2 2
2
3
3 (3 1)
2 1
c2
1
2 (2 1)
c1
C 5 0.83(3)
6
1
k1 3
k2 1
2
C 0
3
Виды статических сетей
Сети с регулярной
топологией связей
ci 0
Сети со случайной
топологией связей
4
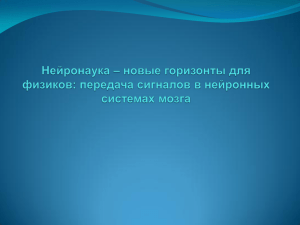
Регулярные сети
Двумерная решетка
Одномерная решетка - цепочка
Алгоритмы построения сетевых топологий
1. Топология малого мира (D.J. Watts, S.H. Strogatz).
Топология сети строится путем генерации случайного графа, имеющего высокий коэффициент
кластеризации вершин (узлов) и относительно небольшую среднюю длину пути. При этом
средняя длина пути слабо зависит от числа вершин N, l – мало даже при большом N.
Регулярная сеть
Сеть малого мира
Берется сеть в виде кольца из N элементов, в котором каждый элемент взаимно связан с 2Ksw
ближайшими соседями – по Ksw с каждой стороны. Затем последовательно перебираются
соединения между взаимодействующими элементами, и с вероятностью Pws эти соединения
разрывается и устанавливается новые, ведущие из выходных элементов в другие случайно
выбранные элементы. Общее количество возникающих при таком алгоритме связей:
E~ ESW(Ksw, N)= 2KswN.
2. Топология Эрдеша-Реньи (Erdos-Renyi).
При построении этой топологии связей перебираются всевозможные сочетания пар элементов
сети, и с некоторой наперед заданной вероятностью PER между элементами пар образуются
взаимные связи. Общее количество возникающих при таком алгоритме связей:
E~ EER(PER, N)= PER N(N-1).
3. Топология Барабаси-Альберт (Barabasi, Albert; масштабно-инвариантная).
Построение этой топологии связей происходит следующим образом. В изначально несвязанной
сети из N элементов выбирается некоторое число (обозначим его MBA) элементов которые
соединяются в соответствии с некоторой топологией (например Эрдеша-Реньи). Затем каждый
из оставшихся N-MBA элементов последовательно добавляется к затравочной сети и образует
взаимные связи с MBA случайно выбранных ее элементов. При этом вероятность присоединения
к некоторому выбранному элементу тем выше, чем выше степень этого элемента
(предпочтительное присоединение). Такой закон построения сети приводит к тому, что в сети
существует небольшое число вершин (узлов) с высокой степенью (так называемых хабов) и
большое число узлов с небольшими степенями. Общее количество возникающих при таком
алгоритме связей:
E~ EBA(MBA, N)= PERMBA(MBA -1)+2MBA(N- MBA).
4. Топология “безразличного связывания”.
Построение этой топологии происходит аналогично топологии Барабаси-Альберт. Однако,
присоединение к элементам затравочной сети (в отличие от топологии Барабаси-Альберт) здесь
происходит равновероятно и не зависит от распределения степеней элементов (“безразличное”
присоединение). Общее количество возникающих при таком алгоритме связей:
E~ EUA(MUA, N)= PERMUA(MUA-1)+2MUA(N- MUA).
II. СЛОЖНЫЕ ДИНАМИЧЕСКИЕ СЕТИ
• Нейронные сети мозга;
• Энергетические сети;
Основные свойства
1. Поведение в узлах СД сетей описывается
динамическими системами, которые могут
демонстрировать как регулярное, так и
хаотическое поведение;
2. Межузловые связи зависят от динамики
узлов
и
сами
могут
описываться
динамическими системами;
3. Топология сети может быть как регулярной,
так и случайной;
Регулярные динамические сети
1. Нейронные сети
2. Автоколебательные сети
Основные эффекты
• Распространение уединенных волн;
• Структурообразование;
• Провал распространения и
пространственный хаос и др.
• Синхронизация и десинхронизация
Нейронные сети
Узлы сети – нейроны
Межузловые связи - синапсы
III. ОСНОВНЫЕ СВОЙСТВА НЕЙРОНОВ И
НЕЙРОННЫХ СИСТЕМ
Нервная клетка - нейрон
Основные свойства нейронов:
Схематическое представление нейрона:
•Нейроны способны генерировать
электрические импульсы (одиночные
или серии)
•Нейроны имеют специфическую
архитектуру (тело клетки,
дендриты, аксон)
•Нейроны осуществляют связь с
другими нейронами через особые
устройства – синапсы
Рисунок взят из книги A. Scott “Neuroscience: a
mathematical primer”, Springer Verlag New York Inc.,
2002
Межнейронные связи – синапсы
Синапсы
Электрические
(непосредственный контакт)
Химические
(связь через внеклеточную среду)
Рисунки взяты из книги A. Scott “Neuroscience: a
mathematical primer”, Springer Verlag New York Inc.,
2002
Типичные колебания нейронов
Основные состояния нейронов
Состояние покоя или малых
(подпороговых) колебаний
Рефрактерность
Состояние возбуждения
Потенциал действия – электрический импульс, обусловленный изменением ионной
проводимости мембраны
Потенциал покоя -60 – 80 мВ по отношению к внешней среде
Колебания пирамидальных
нейронов
Рисунок взят из статьи, D.Golomb, Y.
Amitai, 1998
Хаотические колебания
моторных нейронов
Рисунок взят из статьи, P. Varona, et
al., Neural Networks 2001
Бистабильное поведение таламокортикальных нейронов
Рисунок взят из статьи Stuart W. Hughes
et al, J. Neurophysiol.,1999
Динамические модели нейронов
Модель ФитцХьюНагумо (1969)
w
g(v)
f(v)
v
v f (v ) w
w [ g (v) w]
f(v) – кубическая функция; g(v) – монотонно возрастающая функция;
Модель Моррис-Лекар (1981)
dv
g L (v vL ) g Ca m (v)(v vCa ) g K n(v vK )
dt
dn n (v) n
dt
n (v )
C
v v1
1
m (v) 0.51 tanh
v2 (v) cosh v v3
n
2v
4
v v3
n (v) 0.51 tanh
v4
Модель с дискретным
временем (2007)
x(n 1) x(n) F x(n) y (n) ...
... H x(n) d
y (n 1) y (n) x(n) J
n 0,1,2, дискретное время
F ( x) x( x a)(1 x), 0 a 1
H ( x) - функция Хевисайда
Динамические модели синапсов
Электрические синапсы I gap g i (v vi )
i
Химические синапсы
I syn i si g syn (vi vsyn )
g syn
- максимальная проводимость синапса
vsyn
- реверсивный потенциал
vi vsyn
- синапс возбуждающий
vi vsyn - синапс подавляющий
Безразмерная переменная s показывает как синаптическая проводимость
зависит от пресинаптического потенциала vi . Эту зависимость задают либо
функционально, либо в виде динамических систем.
Например:
s H (v syn )
s (1 s) H (v syn ) s
s
1
1 exp( k[(vi ) syn ])
ri f1 (ri ) si k1
si ( f 2 (ri ) si k 2 ) H (vi ij )
i ,i j
IV. ВОЛНЫ И СЛОЖНЫЕ ПАТТЕРНЫ В ОДНОМЕРНОЙ
РЕГУЛЯРНОЙ СЕТИ
u j f ( u j ) v j d ( u j 1 2 u j u j 1 )
,
v j [ g ( u j ) v j I ]
j 1 , 2 ,..., N
Граничные условия: u0(t)=u1(t), uN+1(t)=uN(t)
Локальный элемент системы – модифицированная
модель ФитцХью-Нагумо
3
u
u
u
v
3
v ( g (u ) v I )
u, u 0
g (u )
u , u 0
Возбудимый режим
u – качественно описывает изменение
мембранного потенциала нейрона;
v – совокупное действие ионных токов;
I – контролирует уровень деполяризации;
– характеризует скорость изменения
ионных токов;
, – учитывают нелинейные свойства
ионных токов;
Математическое моделирование, Т. 17, №. 6, 2005;
Гомоклинические и гетероклинические
траектории в волновой динамике
Система для
бегущих волн
du
d w ,
dw
k ( w f ( u ) v ),
d
dv ( g ( u ) v I ).
d
Гомоклиническая орбита
Бегущий импульс
u
Гетероклиническая орбита
Волновой фронт
u
uj(t)=u(), vj(t)=v()
=t-jh – “бегущая
координата”
k=c2/d
Известия вузов. ПНД, Т. 15, 2007; Phys. Rev. E, V. 68, 2003; Physica D, V. 237, 2008;
Гетероклинический контур и фрактальные
структуры активности
Контур А
Бифуркационная диаграмма
для гомоклинических и
гетероклинических орбит
Кривые G и H имеют вид спиралей с центром в точке (*,c*),
соответствующей существованию гетероклинического контура. При *
существует счетное число волновых решений – бегущих импульсов и
волновых фронтов.
α=0.5, =2.0, I=0.2
Неустойчивость волновых фронтов и импульсов →
фрактальная волновая динамика
Генерирующий импульсы
волновой фронт
Фрактальная структура активности
Спайковая последовательность в
узле j=1 характерная для
генерирующего импульсы фронта.
(a) Спайковая последовательность в
узле j=1 при фрактальной динамике.
(b) Плотность вероятности
межспайкового интерала.
probability
Inter-spike
interval
Фрактальная размерность спайковой
последовательности: Df=1.73–1.75
Гетероклинический контур и структуры активности
Контур Б
Сформирован двумя
гетероклиническими орбитами
Бифуркационная диаграмма
Гетероклинический контур отвечает точке H0;
H+ (H-) бифуркационные множеста, соответствующие
гетероклиническим орбитам, образованным сепаратрисами W1u(O1)
и W2u(O3);
G и G бифуркационные множеста, соответствующие
гомоклиническим орбитам, образованным теми же сепаратрисами;
α=0.8, =0.9, I=0.025
Сложные волновые структуры
Волновая структура, образованная
взаимодействующими бегущими
импульсами и волновыми
фронтами.
Паутино-подобная структура,
образованная
взаимодействующими
связанными состояниями.
Ромбо-подобная структура,
образованная
взаимодействующими
волновыми фронтами.
Эволюция локальных элементов
Волны и сложные структуры активности
Режимы взаимодействия
Бегущие импульсы;
Волновые фронты;
связанные состояния;
Аннигиляция
Автоволновое
Частице-подобное
Частице-подобное поведение
V. ДВУМЕРНЫЕ ЛОКАЛИЗОВАННЫЕ СТРУКТУРЫ
u j ,k f (u j ,k ) v j ,k d (u j 1,k u j 1,k 4 u j ,k u j ,k 1 u j ,k 1 ),
v j ,k ( g (u j ,k ) v j ,k I ), j 1, N , k 1, M
1. Регулярные локализованные структуры
Граничные условия: uj+N,k (t)=uj,k(t), uj,k+M(t)=uj,k(t)
Пример одногорбой
регулярной структуры
Амплитудный профиль структуры и
пространственная кривизна ее волнового фронта
W – характерная
ширина
Регулярные локализованные структуры –
структуры, распространяющиеся вдоль
ансамбля без изменения формы и скорости.
Известия вузов. ПНД, Т. 16, № 3, 2008; Physica D, V. 239, 2010;
Устойчивость регулярных структур
Типичная эволюция характерного размера
изначально возмущенной структуры
Два сценария потери утойчивости
Формирование плоской
волны возбуждения
Установление пространственнооднородного состояния
равновесия
Связанные состояния
многогорбые структуры
смешанные структуры
2. Полиморфные локализованные структуры
Граничные условия: u0,k(t)=u1,k(t), uN+1, k(t)=uN, k(t), uj,k+M(t)=uj,k(t)
Пример одиночной (односвязной)
полиморфной структуры
Типичные пространственные распределения
переменных uj,k и vj,k в вертикальном и
горизонтальном “срезе” структуры
Ширина
W= max Wj
j=1..N
Высота
Physica D, V. 239, 2010;
VI. ПЕРЕКЛЮЧАТЕЛЬНАЯ ДИНАМИКА В НЕЙРОНОЙ СЕТИ
С АДАПТИВНЫМИ ВОЗБУЖДАЮЩИМИ СВЯЗЯМИ
Архитектура сети
При
отсутствии
стимулов
нейроны
находятся в покое;
Когда
на
нейрон
воздействует
надпороговый стимул он переходит в
режим генерации спайков;
ni – нейроны; si – синапсы;
Radiophysics and Quantum electronics, V. 53, № 1, 2010;
Chaos, V. 21, №4, 2011; JETP Letters, V. 95, №9, 2012;
Адаптивные связи
Различные воздействия приводят к качественно различной динамике связи.
(i)
vj
(ii)
s
j
Синапс
Синапс
Модель адаптивной связи
dr
f1 (r ) s k1
dt
ds ([ H (v
dt ( r s k 2 )
j
pre
j
pre
j
)
]r s k 2 )
s – характеризует силу связи; r – вспомогательная
переменная; j – пороги активации взаимодействия;
H(x) - непрерывный аналог функции Хэвисайда:
Стимул-зависимая переключательная динамика в
сети нейронов Моррис-Лекара
Архитектура сети и
стимуляции
12=23=-0.009,31=-0.01,
24=-0.015, 41=0.015
Области с различным переключательным
поведением для Тst=10
Область 1 – Последовательность 1-2-4-3-1-…
Область 2 – Последовательность 1-2-(4,3)-1-…
Область 3 – Режим покоя
Переключательная динамика в сети нейронов
Моррис-Лекара со случайной топологией связей
Синаптические пороги выбраются
случайно из интервала: -0.150.15
Режим переключательной спайковой
активности сети из 100 нейронов Моррис-Лекар
VII. МОДУЛЬНЫЕ СЕТИ С ВОЗБУЖДАЮЩИМИ
СВЯЗЯМИ С ЗАПАЗДЫВАНИЕМ
Модульные сети с
запаздывающими
возбуждающими связями
характерны для кортикальных
структур и нейронных культур.
Сети из 2х100 узлов. Внутри модулей – сложная топология связей (случайная, малый мир,
масштабно-инвариантная), связи направленные, как возбуждающие (80%) так и тормозные (20%).
Между модулями – редкие направленные связи (5% узлов), возбуждающие с запаздыванием.
Phys. Rev. E., V. 90, № 1, 2015;
Динамика узла
xn1 xn F ( xn ) H ( xn d ) yn I nsyn ,
1, x 0,
F
(
x
)
x
(
x
a
)(
1
x
),
H ( x)
0, x 0,
yn1 yn ( xn J ),
n=0,1,2,… – дискретное время, x – качественно описывает динамику мембранного потенциала
нейрона, y – описывает совокупное действие ионных токов (восстанавливающая переменная);
J – определяет порог возбудимости, узлы отличаются значениями J, которые распределены по Гауссу
со средним J0 и отклонением δJ, ε – параметр релаксации, a, β, d управляют формой сигнала,
I isyn I irand I iin Iiout
I irand
- белый гауссов шум с нулевым средним и стандартным отклонением cur
N
I gin cij H ( x j d )( xi )
in
i
cij
j 1
- элементы матрицы смежности для внутримодульных связей
cij 1, если пресинаптический нейрон j действует на постсинаптический
нейрон i
cij 0
I
out
i
в противном случае
N
gout dij H ( x j d )( xi )
j 1
d ij - элементы матрицы смежности для межмодульных связей
Известия вузов. ПНД, Т. 15, № 5, 2007; Chaos, V. 17, 2007;
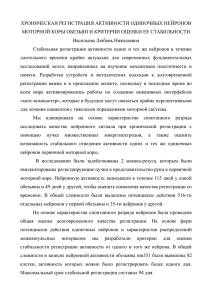
Динамика сети
Спайковые растрограммы и осциллограммы средней активности модулей: увеличение
запаздывания межмодульных связей
gmax=0.02
τ=0
τ=30
τ=50
Динамика сети
Мера синфазности средней
активности модулей
J0
X 1, 2
1 N (1, 2)
xi
N i 1
J 0 - средний по сети уровень возбудимости узлов
Случайная сеть
Сеть «малый мир»
Масштабноинвариантная сеть
Динамика сети
Зависимость σ и частоты первой гармоники групповых бёрстов от τ и g0 .
•Увеличение межмодульных задержек приводит к смене синфазного и
противофазного режимов.
•Средняя частота коллективных колебаний в каждом из этих режимов
уменьшается с ростом времени запаздывания межмодульных связей.
•Увеличение силы межмодульных связей и уровня возбудимости сети приводит
к усилению синхронизации как в синфазном, так и в противофазном режимах.
•Частота групповых бёрстов увеличивается с ростом силы связей во всех
интервалах задержек, за исключением первого (при малых задержках в
синфазном режиме частота падает с увеличением силы связи)
VIII. ДИНАМИКА СЕТИ ГЛОБАЛЬНО СВЯЗАННЫХ
ФАЗОВЫХ ОСЦИЛЛЯТОРОВ С АДАПТИВЫМИ СВЯЗЯМИ
di
1
1
dt
N
d ij
dt
N
j 1
ij
sin(i j ), i 1, ..., N
(sin(i j ) ij )
N=200
0.01
, - контрольные
параметры
D {0
, 0 2 }
2
i фаза i - ого осциллятор а сети
ij сила воздействия, оказываемого со стороны j - ого осциллятора на i - ый
– определяет набег фаз, вызванный наличием задержек передачи
воздействия
– контролирует характер изменения силы связи в зависимости от
разности фаз взаимодействующих осцилляторов
Изв. Вузов. ПНД, Т. 23, № 4, 2015; Изв. Вузов. Радиофизика, Т. 58, №11, 2015;
Пример распределения фаз и частот
осцилляторов в сети
1
1
Rm
N
N
e
j 1
im j
, m 1, 2
Rm
T
1
Rm dt
T 0
R1 1
полная фазовая синхронизация
R1 0
нет полной фазовой синхронизации
R2 1
формирование двух кластеров
синхронной активности находящихся в
противофазе друг к другу
Возможные состояния сети:
TC – двухкластерные состояния
S – глобальная синхронизация
MC – мультикластерные состояния
Fi – частотные кластеры (i – число
частотных кластеров)
AC – асинхронное состояние
Распределения фаз N
Распределения частот NW
Синхронное (S) и двухкластерное (TC) состояния сети
Синхронный режим
R1 1
Двухкластерное состояние
R2 1
Матрица коэффициентов
связей при t=500
Распределение фаз и
частот при t=500
Мультикластерные состояния сети
Матрица коэффициентов
связей при t=8000
Процесс формирования частотных
кластеров
Распределения фаз и частот
колебаний при t=10000
N1 183 N 2 17
4 кластерное состояние
Синхронные состояния с фиксированными
соотношениями разностей фаз между
осцилляторами сети
Состояние F1
Матрица коэффициентов
связей при t=1100
Распределение фаз и частот осцилляторов
сети в момент времени t=1000
Частотные кластеры
Состояние F2 (2 частотных кластера)
Процесс формирования
частотных кластеров.
1 0.65
2 частотных кластера
N1 183 N 2 17
1 0.75
3 частотных кластера
N1 177 N 2 19 N3 4
Матрица коэффициентов
связей при t=2100
Асинхронные состояния с непрерывно
изменяющимися во времени соотношениями фаз
между осцилляторами (АC)
Пространственно-временная диаграмма и матрица коэффициентов связей (t=1100)
Распределение фаз и частот
осцилляторов сети в момент
времени t=1100
С ( )
1 N i j (t ) i j (t )
e e
N j 1
Диаграмма состояний сети
IX. ДИНАМИКА СЕТИ ФАЗОВЫХ ОСЦИЛЛЯТОРОВ С
АДАПТИВНЫМИ СВЯЗЯМИ НА СЛУЧАЙНЫХ ГРАФАХ
di
1
1
dt
Ni
d ij
dt
j{ K i }
ij
sin(i j ), i 1, ..., N
(sin(i j ) ij )
{K i } - множество узлов, связанных с узлом i
N i - количество узлов в множестве {Ki}
N - общее число узлов сети
Топология соединений:
- масштабно-инвариантная сеть
- случайная сеть
N 200
0.01
Динамические состояния в сетях со случайной и
масштабно-инвариантной топологиями соединений
Сети со случайной и масштабно-инвариантной топологиями соединений демонстрируют почти все
основные динамические состояния, наблюдаемые в глобально связанной сети. При этом степень
влияния топологии сети на эти режимы различна.
1
Случайная сеть
Число узлов сети:
Среднее число соединений
приходящееся на один узел:
Общее количество
соединений в сети:
Мультикластерные
состояния (MC)
N 200
kn 10
kT 2000
Химерные состояния (PS)
Химерные состояния (PS) некоторая часть сети образует группу синхронизованных
осцилляторов, в то время как осцилляторы оставшейся части сети продолжают оставаться
несинхронизованными.
Химерные состояния в сетях со случайной топологией соединений
Сеть со случайной топологией соединений
kn 10
Размер синхронизованной части : N Syn 82
kn 20 Размер синхронизованной части : N Syn 120
X. Переключательная динамика кластерных
состояний в сетях с переменной топологией
Свойства сети
•Сеть состоит из N узлов.
•Каждый узел демонстрирует хаотическую
динамику в форме бёрстов.
•Межузловые связи – подавляющие.
•Кластер состоит из нескольких узлов,
которые одновременно генерируют бёрсты,
в то время как остальные узлы находятся в
покое.
Commun. Nonlin. Sci. Numer. Simulat., 23(1-3), 2015
Динамика узла
xn 1 xn F ( xn ) H ( xn d ) yn I ,
yn 1 yn ( xn J ),
где
n=0,1,2… – дискретное время; (x, y) характеризуют состояние
узла; H(x) – функция Хевисайда; a, β, d – положительные
параметры, управляющие формой сигнала; ε определяет
скорость изменения y; J задаёт порог возбудимости узла; I –
входной стимул.
При фиксированных y возможны 2 динамических режима
в зависимости от y:
Динамика узла
xn1 xn F ( xn ) H ( xn d ) yn I ,
yn1 yn ( xn J ),
При получении
подавляющего
стимула система
генерирует бёрст –
эффект
постингибиторного
восстановления.
Структура сети
где g задает силу связей, ν – реверсивный потенциал,
θ задает порог активации синапса.
Параметры подавляющей связи: ν = -0.5, θ = 0.2 и g=0.15.
Матрица смежности
Gij ,n
Gij ,n
1, если j-й узел влияет на i-й узел в момент n
0, в обратном случае
В результате сеть с постоянной топологией генерирует
циклическую последовательность кластеров
– так называемое, кластерное состояние
Пример: N=5,
последовательность 1,2 → 3,4 → 5
Матрица смежности и соответствующая топология сети
определяют кластерное состояния в форме циклической
последовательности
Свойства оператора эволюции
Эволюция топологии сети происходит в результате изменений
(переключений) матрицы смежности Gij , n
где Pkl – оператор эволюции,
«срабатывающий» в момент n=n*
Момент перестройки n=n*, когда одно кластерное состояние
сменяется другим, определяется вспомогательной переменной q ,
динамика которой задается:
0<μ<<1,
- «среднее поле»
сети.
и n*:=n,
Поскольку динамика
переменных xi хаотическая,
то динамика X также
хаотическая и q
демонстрирует малые
флуктуации.
Свойства оператора эволюции
Оператор Pkl сохраняет выбранную симметрию связей, т.е.
количество кластеров и их конфигурация (количество узлов в
каждом кластере) не изменяются.
Оператор Pkl делает две перестановки:
• во-первых, Pkl переставляет k-ю и l-ю строки в матрице Gij,n;
• затем, Pkl переставляет k-й и l-й столбцы в полученной матрице.
Правило выбора строк и столбцов:
• в момент n=n* рассматриваются
текущий и предыдущий кластеры;
• выбирается один узел из одного,
второй узел из другого кластера;
• из всевозможных пар выбирается
имеющая минимальное топологическое
D23 – минимальное топологическое
расстояние по часовой стрелке.
расстояние по часовой стрелке.
Пример: N=5, переключательная активность в
форме 3-кластерных состояний
Всего 30 различных 3-кластерных состояний в сети из 5 узлов, где
два кластера содержат по два узла, а третий кластер состоит из
одного узла:
Граф 3-кластерных состояний
Все 30 состояний и
переходы между ними
задают
ориентированный граф.
Из одного кластерного
состояния si возможно
до 3 различных
переходов в другие
состояния. Задавая
некоторые начальные
условия, невозможно
предсказать
последовательность
состояний si , поскольку
моменты переключений
n* априори неизвестны.
Устойчивость кластерных состояний
Чтобы стабилизировать последовательность, нужно модифицировать
оператор эволюции: перестройка топологии происходит после того, как
вспомогательная переменная достигнет порога, в момент, когда априори
маркированный узел сети активен. В этом случае оператор изменяет
топологию сети предсказуемым образом, т.е. последовательность
кластерных состояний становится устойчивой.
Таким образом, сеть генерирует кластерные последовательности, которые
структурно устойчивы (т.е. порядок кластерных состояний сохраняется) к малым
возмущениям начальных условий и параметров, а также аддитивному шуму малой
интенсивности, и зависят только от входного информационного стимула,
задающего начальную топологию и маркирующего узел в сети.
Спасибо
за внимание
Соавторы
Д.В. Касаткин, А.С. Дмитричев, Д.С. Щапин, О.В. Масленников