обучение на реккурентной нейронной сети модели сериесного
реклама

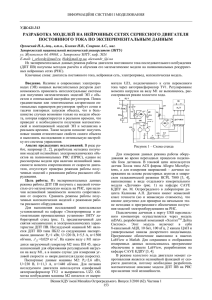
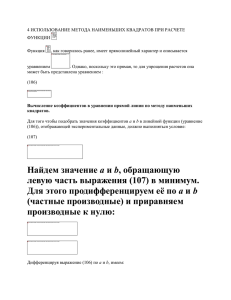
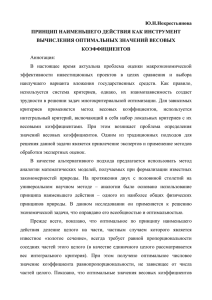
Орловский И.А., Блохин И.В. Украина Запорожский национальный технический университет ОБУЧЕНИЕ НА РЕККУРЕНТНОЙ НЕЙРОННОЙ СЕТИ МОДЕЛИ СЕРИЕСНОГО ДВИГАТЕЛЯ И ИДЕНТИФИКАЦИЯ ЕГО ВНУТРЕННИХ ПАРАМЕТРОВ Введение. Наличие в современных электроприводах (ЭП) мощных вычислительных ресурсов дает возможность применить интеллектуальные системы для получения математических моделей ЭП с объектом и оптимальной настройки регуляторов. Поиск градиентными или генетическими алгоритмами оптимальных параметров регуляторов требует сотни и тысячи повторных запусков объекта, что приводит к необходимости получения математической и имитационной моделей ЭП и механизма в реальном времени. Основным элементом тягового ЭП является сериесный двигатель постоянного тока (ДПТПВ), идентификация нелинейных параметров которого в реальном времени, является актуальной и сложной задачей. В работах [1, 2, 3], разработана методика получения моделей нелинейных электромеханических объектов на полиномиальных рекуррентных нейронных сетях (ПРНС), однако отсутствует идентификация с высокой точностью их внутренних нелинейных параметров из полученных моделей на ПРНС. Цель статьи. Исследовать возможность идентификации нелинейных параметров ДПТПВ из его обученных моделей на ПРНС. Постановка задачи исследования. Процессы в ДПТПВ с нелинейной зависимостью момента сопротивления от скорости описываются системой нелинейных уравнений (1) dI ⎫ [3]: где Rd - эквивалентное активное сопротивление цепи постоянноL( I ) + I ⋅ Rd = U − сФ( I ) ⋅ ω,⎪ ⎪ dt го тока; L(I ) - эквивалентная индуктивность цепи постоянного тока, (1) ⎬ dω ⎪ зависящая от тока якоря двигателя; сФ( I ) - произведение конструкJ = сФ( I ) ⋅ I − M C (ω) , ⎪⎭ dt тивной постоянной “с” двигателя на значение магнитного потока Ф , x& = Ах + Вu (2) зависящего от тока якоря; J - суммарный момент инерции на валу; ⎡ − R d L−1 ( I ) − L−1 ( I )cФ( I ) ⎤ M C (ω) момент сопротивления, зависящий от скорости двигателя ω . A=⎢ ⎥ −1 (3) ⎢⎣ J cФ( I ) ⎥⎦ 0 Для данного объекта вектором состояния является: x = [ I , ω]T ; ⎡ L−1 ( I ) ⎤ 0 В=⎢ ⎥ ⎢⎣ 0 − J −1M C (ω)⎥⎦ x& = CY вектором входных сигналов – u = [U Д ,1]T . Второй элемент вектора u взят равный единице для обеспечения общности выражений при описании момента сопротивления в виде нелинейного коэффициента M C (ω) . (5) С учётом сделанных обозначений система (1) может быть представлена в матричном виде системой (2), где матрицы нелинейных коэффициентов A и B имеют вид (3) и (4). Для получения общих выражений расчёта и обучения весовых коэффициентов ПРНС (с использованием которых формируются полиномы имеющихся в объекте нелинейностей) запишем систему уравнений (2) в виде (4) (5), где Y = [ x1 , x 2 , u1 , u 2 ]T = [ y1, y2 , y3 , y4 ]T – вектор, объединяющий векторы состояния объекта и входных сигналов. Матрица C объединяет матрицы A и B . Структурная схема модели ДПТПВ на ПРНС с использованием полиномиальных блоков [3] дана на рис.1. Полиномиальные блоки POL формируют произведения (с единичными коэффициентами) полиномиальных членов степени r от сигналов поступающих на входы " r ", на сигнал, поступающий на вход "( 1 )". Выходы блоков POL обозначим векторами hij с такими же индексами, как у элементов векто- ров весовых коэффициентов wij и элементов cij матрицы С . При аппроксимации нелинейностей полиномами второго порядка вектора h1 и h 2 , для первого и второго нейронов, соответственно, определяются уравнениями (6) и (7). С учётом приведенных выше обозначений систему уравнений (2) можно представить в виде (8) или более компактно в виде (9). Весовые коэффициенты ПРНС, исходя из уравнения (5) (по аналогии с рассуждениями в работах [1, 2, 3] для дискретной системы с тактом счёта T могут быть вычислены из математической модели ДПТПВ по формуле (10), где wij = Pol r (Tcij ) ; Рис. 1. Структура модели ДПТПВ на ПРНС 566 Pol r ( ) – функция, определяющая вектор коэффициентов полинома степени r для выражения, находящегося в скобках. Нейронные сети, фаззи-логика и генетические алгоритмы в электромеханике h1n = [ I n −1 , I n −1I n −1 , I n −1I n2−1 , ωn −1 , ωn −1I n −1 , ωn −1I n2−1 , U n , U n I n −1 , U n I n2−1 ]T . , (6) h2 n = [ I n−1 , I n−1 I n −1 , I n−1 I n2−1 ,1, ω n−1 , ω n2 −1 ]T , (7) xin = xin −1 + wi1 hi1n + wi 2 hi 2 n + ... + wiK hiKn , i =1, 2, (8) (9) wi hin = ∆xin , i = 1,.2 , ⎡ w11 w12 w13 0 ⎤ W =⎢ ⎥ = Polr ( TC ) . ⎣ w21 0 0 w24 ⎦ (10) Обучение ПРНС выполняться отдельно для каждого нейрона с использованием алгоритмов пакетного обучения одиночного нейрона [4], так как известны вектора hi и вектор состояния в каждом такте счёта. Цель процесса обучения – минимизация суммарных среднеквадратичных ошибок E i ( i – номер нейрона) между элементами вектора состояния объекта и выходными сигналами ПРНС (уравнения (11) и (12)) при одинаковой последовательности входных сигналов, где e i n – ошибка выхода i -го нейрона в n - ом такте счёта; NV – объём обучающей выборки; ∆gin = gin − gin−1 – разность в n -ом такте между текущим g in и предыдущим gin −1 значениями i -го элемента выходного вектора ПРНС. Коррекция весовых коэффициентов i -го нейрона ПРНС (вектор wi ) 1 NV Ei = ∑ ein2 (11) производится на основе градиентного метода обучения, согласно уравне2 n =1 ниям (13) – (15), где hi kn – значения k -го элемента вектора hi для данein = ∆xin − ∆g in (12) ных n -ого такта ∆w i kn - приращение веса k -го элемента вектора wi для ∂Ein ∂w i kn = −ein ⋅ hikn (13) n обучающих наборов; η - коэффициент обучения. ∆wikn = −∑ η ∂Ein ∂w i (14) kn Весовые коэффициенты модели на ПРНС могут быть вычислены, соn гласно уравнениям (10), из известной математической модели по уравнеwi = wi + ∆wikn (15) kn kт −1 ниям системы (16): Если найдены весовые коэффициенты ПРНС методом −1 расчёта или обучения из данных режима работы двигателя, то из них моw1,1 = TPol (− Rd L ( I )) , ⎫ ⎪ гут быть идентифицированы M c (ω ) и L( I ) , согласно уравнениям (17)w1,2 = TPol (− L−1 ( I )cФ( I )) ,⎪ ⎪ (18). Произведение cΦ коэффициента “с” на магнитный поток может ⎪ быть вычислено делением полинома из второго уравнения системы (16) w1,3 = TPol ( L−1 ( I )) , ⎬ (16) ⎪ на полином из третьего уравнения. Сопротивление Rd находится делеw2,1 = TPol ( J −1cФ( I )) , ⎪ нием полиномов первого уравнения системы (16) на полином третьего ⎪ уравнения. Суммарный момент инерции на валу ДПТПВ находится делеw2,4 = TPol (− J −1 M C (ω)) . ⎪ ⎭ нием полинома cФ на полином w2,1 . Результаты измерений и моделирования. Обучение модели на ПРНС и идентификация нелинейных параметров выполнялось для математичеM c 0 = −T −1 ⋅ w1,4,0 , M c1 = −T −1 ⋅ w1,4,1 ,…, M cr = −T −1 ⋅ w1,4, r , (17) ской модели ДПТПВ типа МП-62, имеющего следующие параметры: −1 −1 −1 −1 −1 −1 (18) L 0 = T ⋅ w1,3,0 , L 1 = T ⋅ w1,3,1 ,…, L r = T ⋅ w1,3, r , U н = 220 В ; I н = 260 A ; ωн =53,4 с-1; с =78,5; номинальное значение магнитного потока Фн =0,048 Вб; момент инерции приведенный к валу двигателя J Д =1,36 кг·м2. Измерялись: напря- жение, подаваемое на двигатель, ток и скорость двигателя. Моделирование выполнялось с шагом T =0,0001 с. Приращение ∆xin вычислялось, как среднее значение на предыдущем и последующем шагах. Обучение выполнялось в течение одной – двух эпох для данных первых трёх секунд после подачи напряжения на двигатель. Значения весовых коэффициентов ПРНС второй Таблица 1. степени представлены в табл. 1. Каждый из векторов w11 , w12 , w13 , Значения весовых коэфф.×10-6 w21 , w24 состоит из трёх весовых коэффициентов. w11 -349,8 4,914 -0,0292 На рис. 2, а показан фрагмент напряжения на ДПТПВ, на рис. 2, б w12 -442,47 -32,15 -0,4156 зависимость M C (ω) , на рис. 2, в и рис. 2, г – соответственно, даны w13 сигналы отработки тока и скорости модели ДПТПВ (сплошной лини2369,7 -8,507 0,158 ей) и обученной ПРНС (штриховой линией). w21 -28, 71 2,826 -0,0076 После обучения ПРНС одни нелинейные коэффициенты матриц w24 194,44 -1,475 0,0197 A и B идентифицируются с высокой точностью, для других имеются ошибки. Не точная идентификация происходит для коэффициентов, у которых имеется нелинейность от значений выхода этого же нейрона. Так в первом нейроне этим коэффициентом является Rd L−1 ( I ) , во втором нейроне – M c (ω ) . Проблемы автоматизированного электропривода 567 U, (V) A ,A NN 12 80 12 100 60 80 A 12 40 60 20 40 00 20 80 A NN 12 а) 60 0 1.3 1.32 1.34 1.36 1.38 1.4 t, c 40 1.42 а) I, I, б) A 20 I,A 0 0 120 160 100 140 120 ω, c-1 20 11 55 80 50 60 45 40 40 40 60 80 100 120 140 160 B ,B NN 11 B 11 100 B NN 11 80 60 20 40 20 0 0 1 2 3 4 5 0 0 б) 35 t,c 1 2 3 4 5 30 25 в) г) Рис. 2. Процессы в ДПТПВ и его моделях на ПРНС I,A 20 0 20 40 60 80 100 120 140 160 A ,A NN 21 2.5 На рис. 3 показаны заданные значения нелинейных коэффициентов ДПТПВ и значения, идентифицируемые полиномами, построенными из весовых коэффициентов ПРНС. Идентифицируемое значение момента инерции составляло 1,4 кгм2, заданное 1,36 кгм2. Для сравнения точности модели на ПРНС и результатов идентификации нелинейных коэффициентов из внутренних параметров в табл. 2 приведены значения максимальных ошибок отработки координат и идентификации. I 3 ω 5 Таблица 2. Максимальные ошибки в % cΦ ( I ) A12 A21 B11 5 10 7 3 21 2 1.5 1 21 A NN 21 0.5 0 I,A -0.5 0 3.5 20 L(I ) 7 40 60 80 100 120 140 160 cΦ,cΦNN, Vb cΦ 3 J 3 в) A cΦNN 2.5 2 г) 1.5 Выводы 1. Выполнено обучение модели ДПТПВ на ПРНС и идентификация внутренних нелинейных параметров двигателя. Установлено, что в уравнении для x& i предложенным методом не удаётся идентифицировать нелинейные коэффициенты, у которых имеется нелинейность от переменной xi . 2. Проверка моделей на ПРНС на данных, используемых для обучения, показала высокую точность моделей (максимальная относительная ошибка по току и скорости не превышала 5%). Ошибки идентификации L( I ) , сФ( I ) и J не превышают 7%. 1 0.5 I,A 0 0 0.05 20 40 60 80 100 120 140 160 L,LNN, H 0.045 L LNN 0.04 0.035 д) 0.03 0.025 0.02 I,A 0.015 0 20 40 60 80 100 120 140 160 Рис. 3. Результаты идентификации ЛИТЕРАТУРА 1. Орловский И.А. Расчёт моделей нелинейных электромеханических объектов на полиномиальных рекуррентных нейронных сетях из их известных математических моделей / И.А. Орловский // Технічна електродинаміка. – 2009. – №1. – С. 20–31. 2. Орловский И.А., Расчёт и обучение моделей нелинейных электромеханических объектов на полиномиальных рекуррентных нейронных сетях / И.А. Орловский, А.А. Синявский. // Искусственный интеллект. – 2008. – №3. – С. 579–590. 3. Орловский И.А.. Разработка моделей на нейронных сетях сериесного двигателя постоянного тока по экспериментальным данным / И.А. Орловский, И.В. Блохин, А.С. Смирнов //Вісник Кременчуцького політехнічного університету. – Кременчук. – 2010. – Вип.3 (62), част.1.– С. 153-156. 4. .Бодянский Е..В. Искусственные нейронные сети: архитектуры, обучение, применения / Е.В. Бодянский, О..Г. Руденко //– Харьков, ТЕЛЕТЕХ, 2004. – 372 с. 568 Нейронные сети, фаззи-логика и генетические алгоритмы в электромеханике