Физическое проектирование подсистемы кэш-памяти 2
реклама

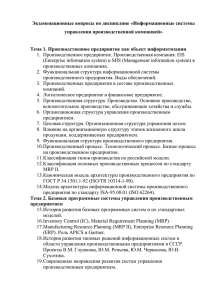
Я.Н. Мороз ФИЗИЧЕСКОЕ ПРОЕКТИРОВАНИЕ ПОДСИСТЕМЫ КЭШ-ПАМЯТИ 2-ГО УРОВНЯ ДЛЯ МИКРОПРОЦЕССОРА «ЭЛЬБРУС-S» Изложен процесс проектирования микропроцессора «Эльбрус-S» на базе технологии 90 нм. Для всех устройств, входящих в подсистему кэш-памяти 2-го уровня, этот процесс включал формирование топологии, размещение, трассировку и дальнейшую верификацию устройства в целом. Найдены решения, позволяющие сократить сроки проектирования и число ошибок, обусловленных человеческим фактором, а также выявлен и устранён ряд проблем, характерных для проектирования с использованием технологических норм 90 нм. Введение Современный маршрут проектирования устройств микропроцессора включает в себя следующие этапы: 1) создание RTL – описание устройства на языке высокого уровня (например, на языке verilog); 2) архитектурный синтез, далее просто «синтез», – перевод из RTL в описание на уровне вентилей (netlist или gate verilog); 3) физическое проектирование – непосредственное размещение вентилей на кристалле, трассировку, организацию питания, построение дерева синхросигналов с последующей физической верификацией устройства в целом. Физическое проектирование – важнейший этап создания новой микросхемы. Фактически, оно представляет собой процесс переноса абстрактной логической модели на конкретную физическую технологию, который непосредственно предшествует производству на специализированных фабриках. Это последняя стадия проектирования, позволяющая внести изменения или правки в проект перед тем, как микросхема будет произведена. В данном случае применялась полузаказная технология физического проектирования, предполагающая использование библиотеки элементов устройств. При таком подходе время исполнения и стоимость проекта сокращаются, т.к. нет необходимости разрабатывать каждый элемент на транзисторном уровне. Объектами физического проектирования были блоки кэш-памяти 2-го уровня и сама подсистема в целом. Кэш-память является одним из базовых архитектурных компонентов кристалла, обеспечивающим ускоренный доступ процессоров к совокупности данных, подлежащих обработке на данной стадии вычислительного процесса. Ее разделение на два уровня можно условно связать с категориями «самых востребованных» и «востребованных» данных, располагающихся, соответственно, на 1-м уровне (сравнительно небольшая по объему сверхбыстрая память) и 2-м уровне (значительная по объему быстрая память). Разработка проводилась с учетом нескольких принципиальных требований: 1) Проектирование было выполнено применительно к технологическому процессу 90 нм. 2) Микропроцессор «Эльбрус-S» создавался как «система на кристалле (systemon-chip)», в рамках которой предстояло интегрировать блоки кэш-памяти 2-го уровня и ее управления в составе единого устройства кристалла – подсистемы кэш-памяти 2-го уровня. 3) Возможности используемой в проекте библиотеки стандартных логических элементов и элементов памяти обусловили выбор тактовой частоты 500 МГц. 4) В связи с заданными характеристиками производительности микропроцессора «Эльбрус-S» требовалось реализовать кэш-память 2-го уровня объемом 2 Мбайт. 5) Новизна проекта не позволяла задать точные значения некоторых параметров устройства (площадь, энергопотребление), ограничившись требованием их минимизации в составе обобщенных параметров всего кристалла. В статье представлено описание решений, которые обеспечили выполнение этих требований на разных этапах проектирования. Ее разделы посвящены проблемам синтеза, размещения, построения дерева синхросигналов, трассировки и верификации подсистемы памяти. 1. Синтез устройств, входящих в подсистему кэш-памяти 2-го уровня Для реализации синтеза, перехода от описания на уровне логики (RTL) к описанию на уровне вентилей (netlist), в данном проекте в полной мере использовались возможности современной системы автоматизации проектирования (САПР) Design Compiler фирмы Synopsys. На начальном этапе синтеза подготавливались файлы-ограничения проектирования, используемые также на этапах размещения и трассировки. Ограничения в синтезе могут быть разделены на два типа: ограничения для интерфейсов и ограничения реализации. Первый тип подразумевает некоторые требования, накладываемые на интерфейсы устройства. Обычно они заключаются в строгих временных показателях для задержек по входу и выходу, параметрах нагрузочной способности и других условиях. Ограничения реализации содержали требования, соответствующие специфике данного проекта, например, запрет на использование некоторых элементов из стандартной библиотеки, задание жёсткого ограничения по площади или производительности. Синтез, по сути, состоит из двух стадий: на первой определяются временные интервалы для выполнения тех или иных логических действий, на второй – детальные соединения между каналами связи и логическим описанием устройств, входящих в состав подсистемы. Из-за сложности и больших размеров подсистема была разбита на составляющие устройства, для которых синтез и дальнейшая оптимизация по ключевым характеристикам, таким как быстродействие и площадь устройства, проводились в отдельности. После выполнения синтеза отдельных устройств, выполнялась сборка и оптимизация всей подсистемы. Одной из базовых функций современных САПР на этапе синтеза является начальная организация (вставка) тестовых цепей, так называемых scan-цепей, с помощью которых будет осуществляться тестирование изготовленной микросхемы. Во время вставки scan-цепей САПР осуществляет замену обычных триггеров на триггеры, содержащие помимо стандартных портов ещё и тестовые. В данном проекте scan-цепи состоят из двухступенчатых триггеров (flip-flop). В двухступенчатом триггере информация записывается в первую ступень, а затем переписывается во вторую и появляется на выходе. Каждый такой триггер имеет следующие порты: D – вход по данным, SD – тестовый вход по данным, SE – разрешающий вход по тестовым данным, Q – выход, CK – вход синхросигнала. Триггеры объединяются в общую тестовую цепь с помощью портов SD и Q. Организация тестовой цепи никоим образом не должна сказываться на работе всего устройства, в то же время, обеспечивая требуемое тестовое покрытие. В связи с общей постановкой задачи, состоящей в интеграции ряда устройств в составе подсистемы, было принято решение организовать единую scan-цепь всей подсистемы с одним входом и одним выходом. Это обеспечило возможность после изготовления микросхемы существенно упростить процедуру ее отладки. В то же время, ввиду функциональных отличий устройств, в каждом из них были необходимы собственные scan-цепи с различным числом и типом сигналов синхронизации. Таким образом, сложность состояла в том, чтобы ввести в подсистему общую scan-цепь, последовательно трансформировать ее в scan-цепи отдельных устройств и затем соединить с 2 единственным выходом. После построения scan-цепи проводится оптимизация устройств в инкрементальном режиме, предполагающем незначительные изменения, при которых сохраняется полученный ранее netlist. В результате всего синтеза получается оптимизированный netlist на языке verilog, который является исходным для следующего этапа – размещения. 2. Размещение Чтобы облегчить и оптимизировать процесс размещения, он был разбит на последовательно выполняемые этапы: 1) Интерпретация описания netlist. Создание дизайна в формате «Milkyway». 2) Планирование топологической структуры – Floorplanning. 3) Организация системы питания. 4) Осуществление начального размещения элементов. 5) Назначение портов для связи между отдельными блоками. 6) Создание временных и паразитных моделей отдельных блоков. 7) Оптимизация отдельных блоков. 8) Оптимизация всей подсистемы. Для выполнения первых трех этапов оказался достаточным стандартный инструментарий фирмы Synopsys – САПР «Jupiter» и «ASTRO». В целом сохраняя последовательность этапов, в некоторых случаях приходилось возвращаться на более ранние этапы и изменять начальные данные с целью улучшения характеристик как отдельных устройств, так и всей подсистемы. Начальное размещение элементов включало две стадии. 1. Размещение готовых составляющих подсистемы. Готовые составляющие, например, структуры памяти, размещались вручную оптимальным образом. Учитывалось быстродействие, энергопотребление и дальнейшая трассировочная способность. 2. Размещение стандартных логических элементов. На данной стадии с использованием САПР проводилось группирование этих элементов соответственно устройствам и дальнейшая оптимизация размещения. Первоначальное группирование позволило ускорить работу САПР при размещении, улучшить временные и другие характеристики проектируемого устройства. Кроме того, при начальном размещении применялась технология «magnet-place». Она предполагает, что в первую очередь размещаются элементы, которые непосредственно взаимодействуют с памятью и должны находиться в непосредственной близости от нее. Этапы 5 – 8 в процессе размещения были связаны с организацией на физическом уровне отдельных блоков «Bank» в составе подсистемы, соответствующих четырем одинаковым по логике устройствам хранения данных (рис. 1). Для остальных устройств вместо организации блоков, которая могла бы привести к увеличению задержек на их стыке, использовалась «пошаговая оптимизация», подразумевающая следующую последовательность действий: 1) группирование и дальнейшая оптимизация отдельных устройств в составе подсистемы кэш-памяти с учётом общих временных характеристик; 2) в случае необходимости выделение некоторых элементов из состава группы (разрушение границ группы, разгруппирование) и последующая оптимизация в составе всей подсистемы. Пункт 1 обусловлен большими размерами всей подсистемы кэш-памяти, вследствие чего САПР не может сразу выполнить оптимального размещения всех устройств, входящих в неё. В свою очередь группирование устройств, оптимизация групп, разгруппирование при необходимости и дальнейшая оптимизация в составе всей подсистемы кэш-памяти осуществляются благодаря возможностям САПР. 3 Рис. 1 Размещение элементов в отдельном блоке типа «Bank» На рис. 2 представлен окончательный вариант размещения элементов подсистемы кэш-памяти. Рис. 2 Окончательное размещение элементов в устройстве Результат размещения хранится в библиотеках с промежуточным расширением «Milkyway». Для осуществления размещения подсистемы памяти с помощью САПР был подготовлен командный скрипт. Благодаря этому и использованию возможностей САПР процесс размещения был практически полностью автоматизирован. С его помощью можно осуществить пошаговую реализацию этапа размещения. Это весьма удобно, т.к. до сих пор вносятся некоторые изменения на этапе написания RTL, вследствие чего 4 возникает необходимость пройти все этапы проектирования сначала. 3. Построение дерева синхросигналов Как отмечалось в разделе, посвященном синтезу, некоторые устройства работают от разных синхросигналов, причём эти синхросигналы отличаются только по фазе. Такая особенность заложена разработчиками при написании RTL. Во всей подсистеме строились два дерева синхросигналов. Первое – для блоков типа «Bank», т.к. для устройств хранения данных разработчики задают отдельный синхросигнал, второе – для всех остальных устройств, которым соответствует другой синхросигнал. Сложность реализации заключалась в том, что оба дерева синхросигналов строились автоматически с помощью возможностей САПР. Это обусловило определенные проблемы в связи с тем, что использование САПР не обеспечивало условие, согласно которому синхросигнал должен подводиться ко всем четырём блокам типа «Bank» строго симметрично с минимальными задержками. Поэтому данное требование пришлось реализовать при синтезе, когда элементы дерева с помощью командного скрипта были вставлены в структуру netlist. На этапе размещения они вручную размещались на поверхности микросхемы и там фиксировались, чтобы при оптимизации размещения и трассировки не произошло их удаление или перемещение в другое место. 4. Трассировка В данном проекте разрабатывалась микросхема, которая содержит девять слоев металлизации. В связи с этим представилась возможность для организации связей между устройствами использовать несколько слоёв, причем сигнальные провода можно было провести в каждом из них, кроме верхних: восьмой и девятый слои предназначались для проведения глобальных шин земли и питания. Для каждого слоя задавалась строгая ориентация направлений трассировки: чётные слои (второй, четвёртый, шестой и восьмой) имеют вертикальную направленность, а нечётные (первый, третий, пятый, седьмой и девятый) – горизонтальную. Помимо трассировки сигнальных проводов, которая выполнялась в основном благодаря возможностям САПР, было особенно важно оптимально организовать единую систему питания всей кэш-памяти (рис. 3). Специфика проблемы состоит в том, что внутренняя система питания составляющих структур памяти представляет собой сетку из большого количества вертикальных шин в четвёртом слое. При подключении к ней напрямую с восьмого и девятого слоёв использованная САПР зачастую не справляется – чрезмерно возрастает плотность проводников в промежуточных слоях с пятого по седьмой, что ухудшает трассировочную способность для сигнальных проводов. Кроме того, в этом случае возникает большое количество разнообразных нарушений класса DRC (см. раздел верификации). По указанной причине было принято решение, согласно которому внутренняя система питания структур памяти и глобальная сетка питания в восьмом и девятом слоях соединяются посредством введенных вручную в 5 – 7 слои промежуточных сеток земли и питания, существенно меньше снижающих трассировочную способность этих слоев – для них были подобраны оптимальные параметры ширины шин и расстояния между ними. Шины земли и питания для стандартных элементов проводятся во втором слое и подключаются к глобальной сетке через промежуточные контактные площадки, организованные в пятом слое. Их наличие вызвано в первую очередь тем, что при непосредственном сквозном подключении между вторым слоем и глобальными сетками питания (слои 8, 9) возникали DRC нарушения из-за значительного количества (больше четырех) сквозных контактов между слоями, находящимися друг над другом. 5 Рис. 3 Организация шин земли и питания в устройствах Определенные проблемы были связаны с необходимостью обеспечить соединение между структурами памяти и проектируемыми устройствами. Структуры памяти были реализованы компилятором в первых четырёх слоях металлизации, которые вследствие этого оказались практически недоступны для трассировки сигнальных проводов. Таким образом, трассировка сигнальных проводов, соединяющих устройства с памятью, оказалась возможной только в трех слоях – пятом, шестом и седьмом. По этой причине порты устройств и их соединение с портами памяти пришлось реализовать именно в этих слоях. 5. Верификация САПР, предназначенные для размещения и трассировки, обычно содержат средства физической верификации, но этот контроль не является полным, не охватывает всех нюансов проектирования. Поэтому перед окончательной передачей документации в формате GDS на фабрику был выполнен ряд необходимых проверок: DRC (Design Rule Checking) – проверка правил проектирования (соблюдение заводских правил); LVS (Layer-Versus-Schematic) – проверка на соответствие топологической схемы исходному схемному описанию (соответствие физического и логического уровней); Antenna Checking – проверка на наличие слишком длинных проводников, подключенных к затворам транзисторов. Для проверок использовалась специализированная система HERCULES фирмы Synopsys. При работе с ней DRC-проверки проводились с помощью специально созданных «runset» командных скриптов, содержащих нормы и правила, соответствующие заводским ограничениям. Для LVS-проверок из файла GDS экстрагировалось описание netlist-verilog (топологическая схема), которое сравнивалась с описанием gate- 6 verilog, сгенерированным после трассировки и дополненным спецификациями всех входящих в устройство стандартных элементов, элементов памяти, блоков вводавывода. Система HERCULES позволила также своими стандартными средствами выявить и устранить нарушения, связанные с наличием длинных проводников в топологии микросхемы. Заключение В соответствии с поставленными требованиями при физическом проектировании подсистемы кэш-памяти 2-го уровня микропроцессора «Эльбрус-S» были получены следующие результаты: проведён синтез отдельных устройств и всей подсистемы; получена топология размещения – площадь подсистемы составила 43,4 мм2 (4,3 × 10,1); выполнена трассировка отдельных устройств и всей подсистемы; подготовлены командные скрипты и ограничения проектирования в виде файлов .sdc, .tdf, ориентированные на технологию 90 нм. Таким образом, обеспечена полная автоматизация процесса проектирования; проведена физическая верификация и определение временных характеристик подсистемы – ее тактовая частота составила 510 МГц. Литература 1. Sadiq M. Sait, Habib Youssef. VLSI Physical Design Automation.Theory and Practice. – 1999. 2. A. Chandrakasan, W.J. Bowhill, Frank Fox. Design of High-performance Microprocessor Circuits. – 2001. 3. Giovanni De Michelli. Synthesis and Optimization of Gigital Circuits. – 1994. 4. G.D. Hahtel, F. Somenzi. Logic Synthesis and Verification Algorithms. – 2000. 5. Зуев А.Л., Долотов П.С. Конструктивные особенности базовых элементов модифицируемого ОЗУ. – 2007. 6. Сафонов Ю.С. Компрессия Скан-цепей. – 2007. 7. Кирюшин С.Б.. Маршрут Функциональной Верификации Сложных СБИС. – 2007г. 8. Описания САПР компании Synopsys, Inc. 9. Dolphin Technology, Inc., RAMpiler + User Manual. 7