Контур тока
реклама

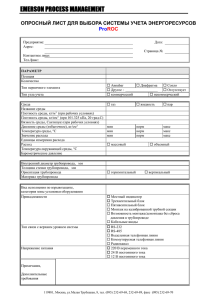
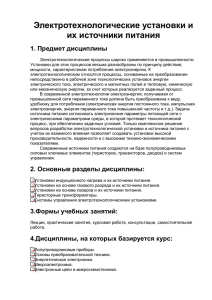
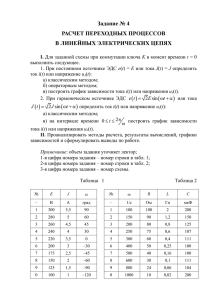
Оптимизация контура тока с компенсированной ЭДС двигателя и безынерционной обратной связью Структурная схема контура тока с компенсированной ЭДС двигателя и безынерционной обратной связью приведена на рис. 1. Контур в прямом канале имеет одну большую постоянную времени Т яц и одну малую постоянную времени Т µт . Основное воздействие на входе контура – управляющее U зт , основной тип управляющего воздействия – ступенчатое и линейное. U зт k тп Т µт р + 1 W ( p) рт (-) U от 1 Rяц iя Т яц р + 1 k дт k от Рис. 1. Структурная схема контура тока с компенсированной ЭДС двигателя и безынерционной обратной связью Основные требования к работе контура тока – максимальное быстродействие и малое (не более 10%) перерегулирование. Большое перерегулирование в контуре тока может приводить к срабатыванию токовой защиты и отключению привода при работе с предельными значениями тока в переходных режимах и в режиме стопорения. В электроприводах большой мощности дополнительно накладывается ограничение на максимальное значение скорости изме⎛ di ⎞ нения тока якоря ⎜⎜ я ⎟⎟ . ⎝ dt ⎠ Контур тока с компенсированной ЭДС и безынерционной обратной связью применительно к управляющему воздействию может быть оптимизирован с ПИ-регулятором: – по МО для системы 2-го порядка; – по ЛО для системы 2-го порядка, с П-регулятором (или без регулятора) по МО для системы 2-го порядка. Тип регулятора тока и метод оптимизации контура предварительно могут быть выбраны в соответствии с табл. 1. Примечание: В соответствии с [часть 7, раздел 3] контур тока с ПИрегулятором может быть настроен и на симметричный оптимум. 1 Таблица 1 Типы регуляторов и методы оптимизации контура тока с компенсированной внутренней обратной связью по ЭДС двигателя Тип регулятора Тип оптимизации МО ПИ ЛО П и без регулятора Т яц Т µт МО** Тм Т яц ≥8 ≥1 I уст I макс σ, % I зад I зад 1.043 ≥1 ≥ 20 МО* Тм Тµ т 4.3 1.0 Не имеют значения 1.0 > 0 .9 > 0 .8 1.0 Примечание 0 ≤ 1.043 Процессы в контуре не зависят от I с и 4.3 ωдв Быстродействие Принято за базовое Меньше в 2.3 раза Больше 1.043 * – типовая настройка ** – настройка с компенсацией статической ошибки. Расчет параметров цепи обратной связи Коэффициент обратной связи контура по току U В k т = зт.макс , , I эп.макс А где U зт.макс – максимальное значение управляющего напряжения на входе контура тока в аналоговых системах U зт.макс ≤ 10 В ; I эп.макс – максимальный допустимый ток электропривода, А. Коэффициент передачи входной цепи канала обратной связи регулятора тока k от = kт , k дт где k дт – коэффициент передачи датчика тока, В . А Оптимизация контура тока с ПИ-регулятором Для настройки контура тока выбирается ПИ-регулятор с передаточной функцией Т рт ⋅ р + 1 . W ( p ) рт = k рт ⋅ Т рт ⋅ р 2 Оптимизация контура тока по МО Т яц ≥ 1. Для точной Т µт оптимизации контура тока по МО коэффициент усиления и постоянная времени ПИ-регулятора определяется по выражениям: Rяц ⋅ Т яц k рт = ; k тп ⋅ k т ⋅ 2 ⋅ Т µт Контур оптимизируется при значении отношения Т рт = Т яц . Настроенный таким образом контур тока имеет следующие передаточные функции: 1 W ( p ) т.раз = 2 ⋅ Т µ2т ⋅ р 2 + 2 ⋅ Т µт ⋅ p – разомкнутого контура; 1 kт W ( p) т.зам = 2 ⋅ Т µ2т ⋅ р 2 + 2 ⋅ Т µт ⋅ p + 1 – замкнутого контура по управлению. Настройка контура тока по управлению соответствует типовой настройке на МО, замкнутый контур представляет собой колебательное звено 1 2-го порядка с коэффициентом демпфирования ξ = = 0.707 и эквивалент2 ной постоянной времени оптимизированного контура Т т = 2 ⋅ Т µт . Контур является астатической системой 1-го порядка по управлению и обеспечивает точную отработку заданного значения тока I уст = I зад = U зт , А. kт Ожидаемые показатели качества работы оптимизированного контура тока: – установившаяся статическая ошибка по управлению при постоянном значении задающего сигнала, А, ∆I у.ст = 0 ; – установившаяся скоростная ошибка при линейном изменении задающего сигнала U зт (t ) , А, ∆I у.ск = 2 ⋅ Т µт dU зт ⎛ di ⎞ ⋅ = 2 ⋅ Т µт ⋅ ⎜ я ⎟ ; dt kт ⎝ dt ⎠ зад 3 – полоса пропускания контура по модулю и фазе, рад , с 0.71 ; ω(пм ) = ω(пф ) = Т µт – показатели работы при отработке ступенчатого управляющего воздействия: σ = 4.3 % – перерегулирование; ( 5) t ру1 = 4.1 ⋅ Т µт – время первого вхождения в 5% зону, с; ( 5) t ру2 = 4.1 ⋅ Т µт – время переходного процесса, с. Максимальное значение производной тока (скорости изменения тока) при отработке ступенчатого входного воздействия U зт. макс U зт. макс I эп. макс А ⎛ diя ⎞ = 0.6448 ⋅ = 0.6448 ⋅ , . ⎜ ⎟ k т ⋅ 2 ⋅ Т µт 2 ⋅ Т µт с ⎝ dt ⎠макс В практике электропривода производную тока принято измерять в номи⎛I ⎞ нальных токах двигателя I дв.н за секунду ⎜⎜ дв.н ⎟⎟ , тогда ⎝ с ⎠ I эп. макс ⎛ diя ⎞ , = 0 . 6448 ⋅ ⎜ ⎟ I дв.н ⋅ 2 ⋅ Т µт ⎝ dt ⎠макс ⎛ I дв.н ⎞ ⎜⎜ ⎟⎟ . с ⎝ ⎠ Оптимизация контура тока по ЛО Оптимизация контура по ЛО применяется при необходимости исключить перерегулирование тока. Контур настраивается при любом значеТ нии отношения яц ≥ 1. Для точной оптимизации контура по ЛО коэффиТ µт циент усиления и постоянная времени ПИ-регулятора определяются по выражениям k рт = Rяц ⋅ Т яц k тп ⋅ k т ⋅ 4 ⋅ Т µт Т рт = Т яц . ; Настроенный таким образом контур тока имеет следующие передаточные функции: W ( p ) т.раз = 1 4 ⋅ Т µ2т ⋅ р 2 + 4 ⋅ Т µт ⋅ p – разомкнутого контура; 4 1 W ( p) т.зам = kт 4 ⋅ Т µ2т ⋅ р 2 + 4 ⋅ Т µт ⋅ p + 1 – замкнутого контура. Настройка контура тока по управлению соответствует типовой настройке на ЛО, замкнутый контур представляет собой апериодическое звено 2-го порядка с коэффициентом демпфирования ξ = 1 и эквивалентной постоянной времени оптимизированного контура Т т = 4 ⋅ Т µт . Контур является астатической системой 1-го порядка по управлению и обеспечивает точную отработку заданного значения тока I уст = I зад = U зт , А. kт Ожидаемые показатели качества работы оптимизированного контура тока: – установившаяся статическая ошибка по управлению при постоянном значении задающего сигнала, А, ∆I у.ст = 0 ; – установившаяся скоростная ошибка при линейном изменении задающего сигнала U зт (t ) , А, ∆I у.ск = 4 ⋅ Т µт dU зт ⎛ di ⎞ ⋅ = 4 ⋅ Т µт ⋅ ⎜ я ⎟ ; kт dt ⎝ dt ⎠зад – полоса пропускания контура по модулю и фазе, рад , с 0.35 ; ωп(м ) = ω(пф ) = Т µт – показатели работы при отработке ступенчатого управляющего воздействия: σ = 0% ; ( 5) ( 5) t ру1 = t ру2 = 9.5 ⋅ Т µт , с. Максимальное значение производной тока при отработке ступенчатого входного воздействия U зт. макс U зт. макс I эп. макс А ⎛ di я ⎞ = 0 . 6445 ⋅ = 0 . 6445 ⋅ , ⎜ ⎟ k т ⋅ 4 ⋅ Т µт 4 ⋅ Т µт с ⎝ dt ⎠ макс 5 ⎛I ⎞ или в единицах измерения ⎜⎜ дв.н ⎟⎟ ⎝ с ⎠ I эп. макс ⎛ di я ⎞ . = 0.6445 ⋅ ⎜ ⎟ I дв.н ⋅ 4 ⋅ Т µт ⎝ dt ⎠ макс Оптимизация контура тока с П-регулятором по МО Контур настраивается при любом значении отношения Т яц Т µт ≥ 1. Пере- даточная функция П-регулятора тока W ( p ) рт = k рт , где k рт = Rяц ⋅ Т яц k тп ⋅ k т ⋅ 2 ⋅ Т µт ⎛ Т µ2т ⎞ ⋅ ⎜1 + 2 ⎟ ⎜ Т ⎟ яц ⎠ ⎝ – коэффициент усиления регулятора (часть 7, раздел 3). Настроенный таким образом контур имеет следующие передаточные функции: ⎛ Т µ2т ⎞ ⋅ ⎜1 + 2 ⎟ 2 ⋅ Т µт ⎜ Т яц ⎟ ⎝ ⎠ = Т яц ⋅ Т µт ⋅ р 2 + Т яц + Т µт ⋅ р + 1 Т яц W ( p) т.раз ( ) – разомкнутого контура; 1+ W ( p) т.зам Т µ2т 2 Т яц 1 ⋅ kт ⎛ Т ⎞2 ⎜1 + µт ⎟ ⎜ Т ⎟ яц ⎠ ⎝ = 2 ⋅ Т µ2тэ ⋅ р 2 + 2 ⋅ Т µтэ ⋅ р + 1 – замкнутого контура по управлению, где Т µтэ = Т µт < Т µт Т µт 1+ Т яц – эквивалентная малая постоянная времени оптимизированного контура. 6 Контур тока является статической системой по управлению с коэффициентом передачи замкнутого контура меньше расчетного 1+ k т.зам Т µ2т 2 Т яц 1 1 . = ⋅ < kт ⎛ Т ⎞2 kт ⎜1 + µт ⎟ ⎜ Т ⎟ яц ⎠ ⎝ По этой причине контур отрабатывает заданное значение тока с ошибкой и, следовательно, установившееся значение тока будет меньше заданного 1+ I уст Т µ2т 2 Т яц U зт U = ⋅ < I зад = зт . 2 kт ⎛ Т ⎞ kт ⎜1 + µт ⎟ ⎜ Т ⎟ яц ⎠ ⎝ Характеристическое уравнение передаточной функции замкнутого контура тока по управлению соответствует характеристическому уравнению оптимизированной по МО системы 2-го порядка с эквивалентной малой постоянной времени Т µтэ < Т µт и эквивалентной постоянной времени оптимизированного контура Тт = 2 ⋅ Т µт . Т µт 1+ Т яц Это определяет соответствие динамических характеристик контура тока с П-регулятором характеристикам системы 2-го порядка, оптимизированной по МО. Ожидаемые показатели качества работы оптимизированного замкнутого контура тока: – установившаяся статическая ошибка при постоянном значении задающего сигнала 2⋅ ∆I у.ст = Т µт 2⋅ Т µт Т яц Т яц U зт I , А; = ⋅ ⋅ зад 2 kт ⎛ Т ⎞2 Т ⎞ ⎛ ⎜1 + µт ⎟ ⎜1 + µт ⎟ ⎜ Т ⎟ ⎜ Т ⎟ яц ⎠ яц ⎠ ⎝ ⎝ – полоса пропускания контура по модулю и фазе 7 ω(пм ) = ω(пф ) = 0.71 ⋅ 1+ Т µт Т яц Т µт , рад ; с – показатели работы при отработке ступенчатого управляющего воздействия: σ = 4.3 % ; ( 5) ( 5) t ру1 = t ру2 = 4.1 ⋅ Т µтэ = 4.1 ⋅ Т µт , с. Т µт 1+ Т яц При отработке линейно изменяющегося управления U зт (t ) динамическая ошибка контура определяется суммой двух ошибок – статической и скоростной ∆I дин = ∆I у.ст + ∆I у.ск . Статическая ошибка с изменением величины управления U зт (t ) изменяется в соответствии с выражением 2⋅ ∆I у.ст = Т µт Т яц U зт (t ) ⋅ , 2 kт ⎛ Т µт ⎞ ⎜1 + ⎟ ⎜ Т ⎟ яц ⎠ ⎝ а скоростная ошибка остается постоянной ∆I у.ск = 2 ⋅ Т µт kт 1+ ⋅ Т µ2т 2 Т яц ⎛ Т µт ⎞ ⎜1 + ⎟ ⎜ Т ⎟ яц ⎠ ⎝ 3 ⋅ dU зт , А. dt В результате динамическая ошибка контура не достигает установившегося значения. Максимальное значение производной тока при отработке ступенчатого входного воздействия U зт. макс ⎛ di я ⎞ = 0.6448 ⋅ ⎜ ⎟ t d ⎝ ⎠ макс 1+ Т µ2т 2 Т яц ⎛ Т µт ⎞ ⎟ 2 ⋅ Т µт ⋅ ⎜⎜1 + ⎟ ⎝ Т яц ⎠ 8 ⋅ U зт. макс kт = 1+ = 0.6448 ⋅ Т µ2т 2 Т яц ⎛ Т µт ⎞ ⎟ 2 ⋅ Т µт ⋅ ⎜⎜1 + ⎟ Т яц ⎠ ⎝ А с ⋅ I эп.макс , ⎛I ⎞ или в единицах измерения ⎜⎜ дв.н ⎟⎟ ⎝ с ⎠ ⎛ di я ⎞ = 0.6448 ⋅ ⎜ ⎟ ⎝ dt ⎠ макс 1+ Т µ2т 2 Т яц ⎛ Т µт ⎞ ⎟ 2 ⋅ Т µт ⋅ ⎜⎜1 + ⎟ Т яц ⎠ ⎝ ⋅ I эп. макс I дв.н . Компенсация статической ошибки контура тока с П-регулятором Для исключения статической ошибки контура тока с П-регулятором достаточно увеличить значение максимального задающего напряжения на входе контура до значения 2 ⎛ Тµт ⎞ ⎜1 + ⎟ ⎜ Т ⎟ яц ⎠ ' ⎝ U зт , В. макс = k т ⋅ I эп макс ⋅ Т µ2 т 1+ 2 Т яц Однако в системах электропривода с унифицированными сигналами управления сделать это затруднительно. В системах электропривода с унифицированными сигналами управления для исключения статической ошибки контура тока с П-регулятором необходимо уменьшить значение коэффициента обратной связи по току Т µ2т Т µ2т 1+ 2 1+ 2 Т яц Т U В яц , = ⋅ , k т' = зт.макс ⋅ k т 2 А I эп.макс ⎛ Т ⎞ 2 ⎛ Т µт ⎞ ⎜1 + µт ⎟ ⎜1 + ⎟ ⎜ Т ⎟ ⎜ Т ⎟ яц ⎠ яц ⎠ ⎝ ⎝ а коэффициент усиления регулятора тока соответственно увеличить 9 ' k рт = Rяц ⋅ Т яц k тп ⋅ k т' ⋅ 2 ⋅ Т µт ⎛ Т µ2т ⎞ Rяц ⋅ Т яц ⋅ ⎜1 + 2 ⎟ = ⎜ Т ⎟ k ⋅ k ⋅ 2 ⋅Т µт яц ⎠ тп т ⎝ 2 ⎛ Т µт ⎞ ⎟ . ⋅ ⎜⎜1 + ⎟ Т яц ⎠ ⎝ Тогда передаточная функция замкнутого контура тока принимает вид 1 W ( p) т.зам = kт 2 ⋅ Т µ2тэ ⋅ р 2 + 2 ⋅ Т µтэ ⋅ р + 1 и контур отрабатывает заданное значение тока без ошибки I уст = I зад = U зт , А. kт В результате такой настройки установившаяся статическая ошибка контура становится равной нулю ∆I у.ст = 0 , а производная тока при отработке максимального скачка задания U зт.макс возрастает до значения 1+ Т µт 1+ Т µт Т яц U зт. макс Т яц А ⎛ di я ⎞ = 0.6448 ⋅ ⋅ = 0.6448 ⋅ ⋅ I эп. макс , ⎜ ⎟ kт 2 ⋅ Т µт 2 ⋅ Т µт с ⎝ dt ⎠ макс ⎞ ⎛I или в единицах измерения ⎜⎜ дв.н ⎟⎟ ⎝ с ⎠ 1+ Т µт Т яц I эп. макс ⎛ di я ⎞ = 0.6448 ⋅ ⋅ . ⎜ ⎟ 2 ⋅ Т µт I дв.н ⎝ dt ⎠ макс Динамическая ошибка контура при отработке линейно изменяющегося входного воздействия U зт (t ) равна скоростной ошибки, установившееся значение которой определяется выражением ∆I у.ск = 2 ⋅ Т µт dU зт , А. ⎛ Т µт ⎞ d t ⎟ k т ⋅ ⎜⎜1 + ⎟ ⎝ Т яц ⎠ ⋅ Оптимизация контура тока без регулятора по МО Результаты, аналогичные полученным при настройке контура тока с Прегулятором, можно получить и при настройке контура тока без регулятора, если коэффициент обратной связи и максимальное значение напряжения управления выбрать равными: 10 kт = Rяц ⋅ Т яц k тп ⋅ 2 ⋅ Т µт ⎛ Т µ2т ⎞ В ⋅ ⎜1 + 2 ⎟ , ; ⎜ Т ⎟ А яц ⎠ ⎝ U зт.макс = k т ⋅ I эп.макс , В. Для исключения статической ошибки в контуре тока, настроенном согласно без регулятора тока, необходимо максимальное значение задающего напряжения на входе контура выбрать равным значению 2 ' U зт.макс ⎛ Т µт ⎞ ⎜1 + ⎟ ⎜ Т ⎟ яц ⎠ = k т ⋅ I эп.макс ⋅ ⎝ , В. Т µ2т 1+ 2 Т яц Сравнительная оценка способов настройки контура тока Полученные расчетные выражения позволяют сравнительно оценить способы настройки контура тока с компенсированной внутренней обратной связью по ЭДС двигателя по основным показателям качества отработки ступенчатых и линейно изменяющихся управляющих воздействий. На рис. 2 для различных настроек приведены графики зависимости показателей качества Т работы контура тока от отношения постоянных времени яц . Т µт Из анализа приведенных зависимостей следует, что наибольшим быстродействием обладает контур тока с П-регулятором (или без него). Однако, из-за статической ошибки такую настройку контура тока следует применять Т только при отношении постоянных времени яц ≥ 20 (статическая ошибка в Т µт этом случае не превышает значения 10%). Если же статическая ошибка в контуре с П-регулятором будет компенсирована, то такая настройка обеспечивает контуру тока лучшие качественные показатели работы по управлению при любых отношениях постоянных времени. Следует иметь в виду, что контур тока без регулятора имеет неунифицированное значение задающего напряжения. Настройка контура тока с ПИ-регулятором на МО обеспечивает технически оптимальные показатели работы контура вне зависимости от отношеТ ния постоянных времени яц и является практически наиболее часто примеТ µт няемой. 11 о.е. I уст о.е. 3.0 I зад 1.2 * t ру2 2.5 0.8 2.0 П-РТ kт 0.6 t ру (МО ) ПИ-РТ k т' 1.0 t ру 1.5 1.0 0.4 5 10 15 а 20 25 30 о.е. ⎛ di ⎞ ⎛ di ⎞ ⎟ ⎜ ⎟ ⎝ dt ⎠ ⎝ dt ⎠ МО о.е. 2.5 2.5 ПИ-РТ ЛО * t ру1 ПИ-РТ СО * t ру1 ПИ-РТ МО П-РТ Т яц Т µт 5 о.е. ⎜ * t ру1 * t ру1 Т яц 0.5 Т µт 0.2 ПИ-РТ СО ∆I ск 10 15 б ПИ-РТ ЛО 2.0 ПИ-РТ СО П-РТ 1.5 1.5 k т' 1.0 ПИ-РТ МО 1.0 kт ПИ-РТ СО 0.5 ПИ-РТ ЛО Т яц k т' 0.5 10 15 в 20 25 30 о.е. П-РТ Т яц kт Т µт 5 25 30 о.е. ∆I ск (МО ) ПИ-РТ МО 2.0 20 5 Т µт 10 15 г 20 25 30 о.е. Рис. 2. Показатели качества работы контура тока по управлению при разных способах настройки: а – установившееся значение тока относительно заданного; б – время реакции на ступенчатое задание; в – максимальное значение производной при ступенчатом задании; г – скоростная ошибка при отработке линейно изменяющегося задания Настройку контура тока с ПИ-регулятором на ЛО следует применять в системах электропривода, в которых к быстродействию не предъявляется жестких требований и необходимо исключить перерегулирование тока. Для повышения быстродействия настройку контура тока на ЛО можно применить с П-регулятором (или без него). Сделанные выводы относятся к настройке контура тока только с компенсированной внутренней обратной связью по ЭДС двигателя. 12 о.е. 1.0 I уст I зад 1, 2, 4 0.8 3 1 − ПИ - РТ, МО 2 − ПИ - РТ, ЛО 3 − П - РТ, МО (типовая настройка) 4 − П - РТ, МО (с компенсацией статической ошибки) Т яц 0.6 0.4 0.2 Т µт 5 10 15 20 25 30 35 40 о.е. Рис. 3 о.е. 2.0 1.8 (5) t ру1 (5) t ру1 МО 2 1.6 1 − ПИ - РТ, МО 2 − ПИ - РТ, ЛО 3 − П - РТ, МО (типовая настройка) 1.4 4 − П - РТ, МО (с компенсацией статической 1.2 1.0 ошибки) 1 0.8 0.6 0.4 0.2 3, 4 Т яц Т µт 5 10 15 20 Рис. 4 13 25 30 35 40 о.е. Влияние некомпенсированной ЭДС двигателя на процессы в контуре тока е дв U зт РТ (-) U от k ⋅Ф (-) е тп k тп Т µт р + 1 ω дв 1 k ⋅Ф Jэ ⋅ р i Rяц Т яц р + 1 k от k дт а U зт РТ (-) Тм ⋅р Rяц е тп k тп Т µт р + 1 U от i Т м ⋅ Т яц ⋅ р 2 + Т м ⋅ р + 1 kт б Рис. 1. Структурная схема контура тока с безынерционной обратной связью и учетом ЭДС двигателя: а – исходная; б - преобразованная e дв (k ⋅ Ф ) 2 Jэ ⋅ р U зт U от Wрт ( p) (-) k тп Т µт р + 1 e тп (-) 1 Rяц (-) Iс i дин iя Т яц ⋅ р + 1 k от k дт Рис. 2. Структурная схема контура тока с учетом ЭДС двигателя и статической нагрузки 14 о.е. 1.0 I уст I зад МО 0.8 ЛО 0.6 0.4 0.2 Тм Т µт 5 10 15 20 25 30 40 о.е. 35 Рис. 3. Зависимость установившегося значения тока в контуре с некомпенсированной ЭДС двигателя от отношения постоянных времени % 70 σ 60 Тм = 0.25 Т яц 50 40 Tм Tµ т 0.5 1 30 20 2 4 10 Тм Т µт 10 5 10 15 20 25 30 35 40 о.е. Рис. 4. Зависимость перерегулирования тока в контуре с некомпенсированной ЭДС двигателя, ПИ-регулятором и настройкой на МО 15 % 70 σ 60 Тм = 0.25 Т яц 50 40 0.5 30 1 20 2 10 Тм Т µт 4 5 10 15 20 25 30 35 40 о.е Рис. 5. Зависимость перерегулирования тока в контуре с некомпенсированной ЭДС двигателя, ПИ-регулятором и настройкой на ЛО 16