применение теоремы об изменении кинетической энергии к
реклама

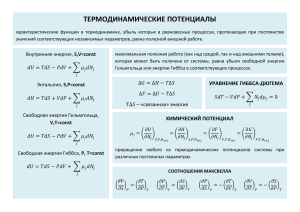
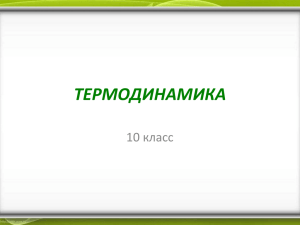
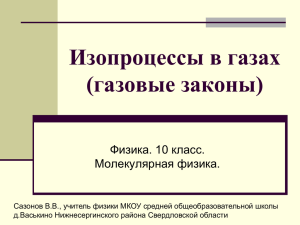
ПРИМЕНЕНИЕ ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ К ИЗУЧЕНИЮ ДВИЖЕНИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ Рассматривается механическая система с одной степенью свободы, состоящая из трех твердых тел, которые совершают поступательное или вращательное движения. Для определения скорости поступательно движущегося тела применяется теорема об изменении кинетической энергии. 1. Пример выполнения задания Механическая система состоит из неоднородного диска 1, однородного диска 2 и груза 3 (рис. 1). Рис 1. Исходная схема изучаемой механической системы Заданы следующие параметры системы: m1, m2, m3 – массы тел; R1, r1 – радиусы внешней и внутренней окружностей диска 1; i1 – радиус инерции диска 1; R2 – радиус диска 2. Рассматриваемая механическая система начинает движение из состояния покоя под действием постоянной силы P и постоянного момента M, приложенных к диску 1. На ведомый диск 2 действует постоянный момент сил сопротивления Mc. Определить скорость груза 3 после его перемещения на расстояние s. 1 Решение Решение данной задачи основывается на применении теоремы об изменении кинетической энергии: T − T0 = ∑ Ai , (1) где T – кинетическая энергия системы в конечный момент времени, когда груз 3 переместился на расстояние s; T0 – начальная кинетическая энергия (T0 = 0); ∑ Ai - сумма работ внешних сил и моментов на заданном перемещеi i нии данной системы. Конечная кинетическая энергия T равна сумме кинетических энергий вращательных движений дисков 1 и 2 и поступательного движения груза 3: 1 1 1 2 2 2 T = T1 + T2 + T3 = I1ω12 + I 2ω22 + m3v32. (2) Рис. 2. Схема системы при решении данного примера Выразим кинетическую энергию T через искомую скорость v3 (рис. 2). Из рис. 2 видно, что угловая скорость ω1 = v3 / r1. Скорость точки E контакта дисков 1 и 2 vE = ω1 R1 = ω2 R2. Следовательно, угловая скорость диска 2 ω2 = (R1 / R2) ω1 = (R1 v3) / (r1 R2). Моменты инерции дисков 1 и 2 равны: I1 = m1 i12; I2 = m2 R22 / 2. В результате подстановки этих формул в (2) получаем кинетическую энергию T в следующем виде: T= 1 2 2 mпр v3 , (3) 2 где mпр = m1( i1 2 m2 R1 2 ) + ( ) + m3 – приведенная масса рассматриваемой 2 r1 r1 системы. Сумма работ вешних сил и моментов, действующих на рассматриваемую механическую систему, равна ∑ Ai = A( P ) + A( M ) + A( M c ) + A(m1 g ) + A(m2 g ) + A(m3 g ) , i (4) где A( P ) = ( PR1 )ϕ1 - работа постоянной силы P , равная произведению ее момента PR1 на угол поворота ϕ1 диска 1; A( M ) = M ϕ1 - работа постоянного момента M; A( M c ) = − M c ϕ2 - работа постоянного момента сил сопротивления M c ; A(m1 g ) = 0, A( m2 g ) = 0 - работы сил тяжести, действующих на диски 1 и 2; они равны нулю, т.к. центры тяжести C1 , C2 этих дисков остаются неподвижными; A(m3 g ) = −m3 g s - работа силы тяжести, действующей на груз 3, равная взятому со знаком «минус» произведению силы тяжести m3 g на высоту подъема s груза 3. Кроме вышеперечисленных сил и моментов на механическую систему действуют также динамические реакции, приложенные в шарнирах C1 и C2. Работы этих реакций из-за неподвижности шарниров C1 и C2 равны нулю и на рис. 2 они не показаны. Выразим углы поворота ϕ1 , ϕ2 дисков 1 и 2 через путь s , пройденный грузом 3. Воспользуемся для этого равенствами ω1 = v3 / r1 и ω2 = (R1 v3) / (r1 R2), в которых ω1 = ϕ& 1 , ω2 = ϕ& 2 ,v3 = s& . Интегрируя эти равенства по времени с нулевыми начальными данными, получаем: ϕ1 = s / r1 ; ϕ2 = ( R1s ) /( R2 r1 ) . После подстановки этих выражений для ϕ1 и ϕ2 в (4) сумма работ внешних сил и моментов записывается в виде R 1 R ∑ Ai = [ P 1 + M − M c 1 − m3 g ]s = Qs s , (5) i r1 r1 R2 r1 R1 1 R1 − m3 g - обобщенная сила, соответствующая где Qs = P + M − M c r1 r1 R2 r1 координате s. С учетом полученных выражений для кинетической энергии (3) и суммы работ (5) формулу (1) для теоремы об изменении кинетической энергии получаем в следующем окончательном виде: 1 2 mпр v3 = Qs s . 2 3 Ответ Скорость груза 3, начавшего движение из состояния покоя, после перемещения на расстояние s равна v3 = (2Qs s / mпр) ½, где приведенная масса системы i1 2 m2 R1 2 ) + ( ) + m3 ; 2 r1 r1 обобщенная сила mпр = m1( (6) R1 1 R + M − M c 1 − m3 g . (7) r1 r1 R2 r1 Данная расчетно-графическая работа может быть выполнена в компьютерном классе ЦДО НИУ ИТМО с использованием специально разработанного тестового задания. Пример окна этого задания показан на рис. 3. В окне приведены схема механической системы, ее буквенные параметры и краткое изложение решения поставленной задачи. Конечная кинетическая энергия заданной механической системы при перемещении груза 3 на расстояние s записана в виде Qs = P T= 1 2 [k1 m1 + k2 m2 + m3] v32 = 1 2 mпр v32 . (3) Сумма работ постоянных сил и моментов, действующих на рассматриваемую механическую систему, записана в виде ∑ Ai = [a1 M − a2 M c + a3 m3 g ] s = Qs s i в случае, если система приводится в движение под действием момента M, или в виде ∑ Ai = [a1P − a2 M c + a3 m3 g ] s = Qs s i при движении системы под действием силы P. В процессе выполнения тестового задания требуется вычислить коэффициенты k1, k2, a1, a2 и a3, входящие в вышеуказанные формулы для T и ∑ Ai . i Найденные коэффициенты следует выбрать из содержащихся в окне программы раскрывающихся списков и нажать кнопку «Ответ готов». В результате проверки введенных коэффициентов выводятся соответствующие сообщения. Например, на рис. 3 показан случай, когда коэффициенты k1, a2 и a3 найдены верно, а коэффициенты k2 и a1 – неверно. Далее следует проверить вывод формул для неправильных коэффициентов и после исправления ошибок ввести другие значения этих коэффициентов. 4 Рис. 3. Окно тестового задания для выполнения РГР 5 В одном сеансе работы с тестовым заданием предусмотрены пять попыток ввода коэффициентов. За каждую попытку, в которой имеются неправильные значения коэффициентов, рейтинг выполнения снижается на 10%. Если задание выполнено с 1-й попытки, то рейтинг будет равен 100%, если со 2-й – 90% и т.д. Таким образом, РГР считается зачтенной, если тестовое задание выполнено хотя бы с использованием последней 5-й попытки, и полученный рейтинг будет равным 60%. В зависимости от достигнутого рейтинга в электронный журнал вносится соответствующее количество баллов. Предусмотрено три сеанса работы с тестовым заданием продолжительностью 30 минут каждый. В случае необходимости у преподавателя имеется возможность открыть доступ к дополнительным сеансам работы для его выполнения в компьютерном классе ЦДО. 2. Исходные данные для самостоятельной работы Механическая система, состоящая из дисков 1 и 2 и груза 3, начинает движение в вертикальной плоскости из состояния покоя под действием постоянного момента M или постоянной силы P. На диск 2 действует постоянный момент сил сопротивления Mc. Определить скорость v3 груза 3 после его перемещения на расстояние s. Схемы и параметры механических систем приведены в табл. 1, где используются следующие обозначения: m1 – масса диска 1; m2 – масса диска 2; m3 – масса груза 3; R1, r1 – радиусы большой и малой окружностей диска 1; i1 – радиус инерции диска 1 (если i1 не задан, то диск 1 считается однородным диском); R2, r2 – радиусы большой и малой окружностей диска 2; i2 – радиус инерции диска 2 (если i2 не задан, то диск 2 считается однородным диском); M – постоянный движущий момент; P – постоянная движущая сила; Mc – постоянный момент сил сопротивления; T0 - начальная кинетическая энергия данной системы (T0 = 0); s – расстояние, пройденное грузом 3; v3 – искомая скорость груза 3 в конечном положении механической системы. 6 Таблица 1 № вар. Исходная схема Параметры системы Дано: m1, m2, m3; R1, R2, r2, i2; M = const; Mc = const; T0 = 0, s. Найти: v3. 1 Дано: m1, m2, m3; R1, r1, i1, R2; P = const; Mc = const; T0 = 0, s. Найти: v3. 2 Дано: m1, m2, m3; R1, i1; R2, r2, i2; M = const; Mc = const; T0 = 0, s. Найти: v3. 3 7 Продолжение таблицы 1 № вар. Исходная схема Параметры системы Дано: m1, m2, m3; R1, R2, r2, i2; M = const; Mc = const; T0 = 0, s. Найти: v3. 4 Дано: m1, m2, m3; R1, R2, r2, i2; P = const; Mc = const; T0 = 0, s. Найти: v3. 5 Дано: m1, m2, m3; R1, i1; R2, r2, i2; M = const; Mc = const; T0 = 0, s. Найти: v3. 6 8 Продолжение таблицы 1 № вар. Исходная схема Параметры системы Дано: m1, m2, m3; R1, r1, i1; R2, r2, i2; P = const; Mc = const; T0 = 0, s. Найти: v3. 7 Дано: m1, m2, m3; R1, r1, i1; R2, r2, i2; P = const; Mc = const; T0 = 0, s. Найти: v3. 8 Дано: m1, m2, m3; R1, r1, i1, R2; M = const; Mc = const; T0 = 0, s. Найти: v3. 9 9 Продолжение таблицы 1 № вар. Исходная схема Параметры системы Дано: m1, m2, m3; R1, r1, i1, R2; M = const; Mc = const; T0 = 0, s. Найти: v3. 10 Дано: m1, m2, m3; R1, r1, i1; R2, r2, i2; P = const; Mc = const; T0 = 0, s. Найти: v3. 11 Дано: m1, m2, m3; R1, r1, i1; R2, i2; P = const; Mc = const; T0 = 0, s. Найти: v3. 12 10 Продолжение таблицы 1 № вар. Исходная схема Параметры системы Дано: m1, m2, m3; R1, r1, i1; R2, r2, i2; P = const; Mc = const; T0 = 0, s. Найти: v3. 13 Дано: m1, m2, m3; R1, r1, i1; R2; M = const; Mc = const; T0 = 0, s. Найти: v3. 14 Дано: m1, m2, m3; R1, r1, i1; R2, i2; M = const; Mc = const; T0 = 0, s. Найти: v3. 15 11 Продолжение таблицы 1 № вар. Исходная схема Параметры системы Дано: m1, m2, m3; R1, r1, i1; R2, r2, i2; P = const; Mc = const; T0 = 0, s. Найти: v3. 16 Дано: m1, m2, m3; R1, r1, i1; R2; M = const; Mc = const; T0 = 0, s. Найти: v3. 17 Дано: m1, m2, m3; R1; R2, i2; M = const; Mc = const; T0 = 0, s. Найти: v3. 18 12 Продолжение таблицы 1 № вар. Исходная схема Параметры системы Дано: m1, m2, m3; R1, r1, i1; R2, r2, i2; P = const; Mc = const; T0 = 0, s. Найти: v3. 19 Дано: m1, m2, m3; R1, r1, i1; R2; M = const; Mc = const; T0 = 0, s. Найти: v3. 20 Дано: m1, m2, m3; R1, r1, i1; R2, r2, i2; P = const; Mc = const; T0 = 0, s. Найти: v3. 21 13 Окончание таблицы 1 № вар. Исходная схема Параметры системы Дано: m1, m2, m3; R1, r1, i1; R2; P = const; Mc = const; T0 = 0, s. Найти: v3. 22 Дано: m1, m2, m3; R1, r1, i1; R2; M = const; Mc = const; T0 = 0, s. Найти: v3. 23 Дано: m1, m2, m3; R1; R2, r2, i2; P = const; Mc = const; T0 = 0, s. Найти: v3. 24 14