УПРАВЛЕНИЕ СИСТЕМОЙ «ХИЩНИК–ЖЕРТВА»(С УЧЕТОМ
реклама

ISSN 1810-0198. Вестник ТГУ, т. 18, вып. 5, 2013
3. Витгенштейн Л. Логико-философский трактат // Витгенштейн Л. Философские работы. Часть I.
М.: Издательство «Гнозис», 1994. С. 19.
4. Медведев Н.В. Философия Людвига Витгенштейна и проблемы понимания иных культур: монография. Тамбов: Издательский Дом ТГУ им. Г.Р. Державина, 2009. С.58.
5. Frascolla P. Wittgenstein’s Philosophy of Mathematics. London and New York: Routledge, 1994; Frascolla
P. The Tractatus System of Arithmetic // Synthese. 1997. № 112. Pp. 353–378; Marion M. Wittgenstein, Finitism,
and the Foundations of Mathematics. Oxford: Clarendon Press, 1998; Floyd J. Number and Ascriptions of Number
in Wittgenstein’s Tractatus // Perspectives on Early Analytic Philosophy: Frege, Russell, Wittgenstein, E. Reck
(ed.), New York: Oxford University Press, 2002. P. 308-352.
6. Marion M. Wittgenstein, Finitism, and the Foundations of Mathematics. Oxford: Clarendon Press, 1998.
Chapter 1, 2, 4.
Medvedeva E.E. FORMALISM IN WITTGENSTEIN’S «LOGICAL-PHILOSOPHICAL TREATISE».
The main aspects of the concept of mathematics of early Ludwig Wittgenstein are analyzed. The
author examines the formalist concept of philosophy of mathematics of Wittgenstein, presented in
«Tractatus Logico-Philosophicus».
Key words: philosophy of mathematics; logic; tautology; language; reality; mathematical proposition;
truth; logicism; theory of operations.
УДК 517.977
УПРАВЛЕНИЕ СИСТЕМОЙ «ХИЩНИК-ЖЕРТВА» (С УЧЕТОМ
ВНУТРИВИДОВОЙ КОНКУРЕНЦИИ)
c
⃝
В.В. Мезго
Ключевые слова: иерархическая система; неопределенность; метод штрафных функций;
принцип гарантированного результата; «хищник–жертва».
Приведен пример применения анализа информационной дифференциальной модели
двухуровневой иерархической системы в условиях неопределенности в задаче управления двумя охотничими хозяйствами. Верхний уровень применяет принцип гарантированного результата. Методом штрафных функционалов исходная максиминная задача
сведена к задаче на максимум. Необходимые условия оптимальности позволяют найти
оптимальную траекторию системы и оптимальную стратегию Центра.
Имеется система двух биологических видов (хищников, жертв) [1, 2, 3], эволюция которой описывается системой дифференциальных уравнений ẋ1 = x1 (ε1 − γ1 x2 − y) − φ1 x21 ,
ẋ2 = x2 (γ2 x1 − ε2 − y) − φ2 x22 , x1 и x2 – численности жертв и хищников, соответственно,
положительные коэффициенты: ε1 – естественного прироста жертв, ε2 – смертности хищника в отсутствие жертв, γ1 – скорости потребления жертв хищником, γ2 – переработки
одним хищником биомассы жертв в свою собственную биомассу; φ1 , φ2 – коэффициенты
гибели за счёт конкурентных конфликтов, Центру и подсистемам при выборе своих стратегий известно лишь множество Y возможных значений неопределённого фактора y, из-за
чего они применяют гарантированный подход.
Состояние системы отслеживает Центр, который устанавливает ставки налога на добы(1)
(2)
чу животных: u1 (t) – на добычу жертв, u1 (t) – на добычу хищников. Подсистемы –
охотничьи хозяйства, заботятся лишь о доходности своей деятельности. Стратегии элемен(1)
(2)
тов нижнего уровня: ui (t) – добыча жертв, ui (t) – добыча хищников, i = 2, 3.
2607
ISSN 1810-0198. Вестник ТГУ, т. 18, вып. 5, 2013
С учётом добычи эволюция системы во времени изменится:
{
(1)
(1)
ẋ1 = x1 (ε1 − γ1 x2 − y) − φ1 x21 − u2 − u3 ,
(2)
(2)
ẋ2 = x2 (γ2 x1 − ε2 − y) − φ2 x22 − u2 − u3 .
Критерий первого участника определим как
∫ϑ
F1 (u1 , u2 , u3 , x, y) = Φ1 (x (ϑ)) +
g1 (u1 (t) , u2 (t) , u3 (t) , x (t) , y, t) dt.
t0
Предположим, что критерии подсистем явно не зависят от x, определим их в виде
∫ϑ
F2 (u1 , u2 , u3 , y) =
g2 (u1 (t) , u2 (t) , u3 (t) , y, t) dt,
t0
∫ϑ
F3 (u1 , u2 , u3 , y) =
g3 (u1 (t) , u2 (t) , u3 (t) , y, t) dt.
t0
Пусть
xc1 ,
[(
=
xc2
: желаемые численности жертв и хищников соответственно, тогда
(1)
(2)
u2 (u1 ) u2 (u1 )
(1)
(2)
u3 (u1 ) u3 (u1 )
)(
g1 (u1 , u2 , u3 , x, y) =
)]T ( )
(1)
u1
1
− δ1 (x1 − xc1 )2 − δ2 (x2 − xc2 )2 − χ1 e−y .
(2)
1
u1
Пусть затраты на добычу жертв – c1 , на добычу хищников – c2 ; цены на реализацию
животных фиксированы, p1 – для жертв, p2 – для хищников. Затраты на добычу будем
считать квадратично зависящими от объема добычи:
(
)
(
)T (
) (
(1) 2
)T
(1)
(1)
ui
p1 − u 1
c1
ui
(
) − χi e−y , i = 2, 3.
gi (u1 , u2 , u3 , y) =
−
(2)
(2)
(2) 2
c2
p2 − u 1
ui
ui
(
)
(1)
u
Oi
Пусть uO
, i = 2, 3, такие, что F2 (u1 , uO
2 , u3 , y) = max F2 (u1 , u2 , u3 , y),
i =
(2)
u2 ∈D2
uOi
O
F3 (u1 , u2 , u3 , y) = max F3 (u1 , u2 , u3 , y). Элементы нижнего уровня следующим образом
u3 ∈D3
(
)
95
O
O
делят добычу: u2 = αu2 , u3 = (1 − α) u3 . Пусть y ∈ [0, 5; 1], t ∈ [0; 5], x(0) =
, ε1 =
5
= 5, ε2 = 0.5, γ1 = 1, γ2 = 0, 01, φ1 = 0, 000005, φ2 = 0, 00003, p1 = 1, p2 = 10. Стратегии
(1)
(2)
Центра ограничены: u1 (t) ∈ [0, 3; 0, 7] , u1 (t) ∈ [3; 7, 5] , желаемые численности животных:
xc1 = 102, xc2 = 5. Для простоты проведем вычисления при δ1 = 0, 036, δ2 = 0, 45, χ1 = χ2 =
= χ3 = 0, 01. При такой постановке задачи (фиксированные цены, одинаковые затрат на
добычу, однозначная реакция нижнего уровня), варьируя α, убеждаемся, что F1 = −1, 26.
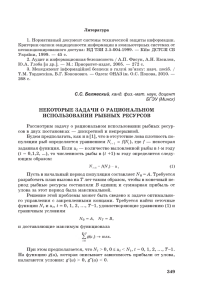
Приняв α = 0, 5, получим в результате вычислений F2 = F3 = 2, 18. Оптимальная траектория системs изображена на рис. 1.
2608
ISSN 1810-0198. Вестник ТГУ, т. 18, вып. 5, 2013
Рис. 1. Оптимальная траектория системы
ЛИТЕРАТУРА
1. Жуковский В.И., Салуквадзе М.Е. Риски и исходы в многокритериальных задачах управления. Тбилиси: Интелекти, 2004.
2. Лебедев В.В. Математическое моделирование социально-экономических процессов. М.: Изограф, 1997.
3. Петросян Л.А., Захаров В.В. Введение в математическую экологию. Л.: Изд-во Ленингр. ун-та, 1980.
Mezgo V.V. MANAGEMENT OF SYSTEM «PREDATOR-PREY» (WITH THE CONSIDERATION INTRASPECIFIC COMPETITION)
An example of application of analysis of the differential information model of two-level hie-rarchical
system in conditions of uncertainty in the problem of two hunting is shown.The lower level selects his
answer within the unfavorably principle. Using the penalty technique, initial maxmin problem is reduced
to the maximization one. The necessary optimality conditions allow us to find the optimal trajectory of
the system and the optimal strategy of the lower level.
Key words: hierarchical system; uncertainty; penalty technique; pessimism principle; «predator-prey».
УДК 517.977.5
ON THE OPTIMALITY CONDITIONS FOR SINGULAR CONTROLS
c
⃝
Z.T. Mingaleyeva, I.A. Shvartsman
Key words: optimal control; singular control; second-order conditions.
We derive second-order necessary optimality conditions for singular controls for an
unconstrained nonlinear Mayer problem. By using the method of finite-dimensional
approximations we relax the assumption of piecewise-continuity of the optimal control
present in the earlier literature.
This work is devoted to the derivation of the second-order necessary optimality conditions
for singular controls for an unconstrained nonlinear Mayer problem
φ(x(T )) → min
ẋ(t) = f (t, x(t), u(t)), t ∈ [S, T ],
(1)
x(S) = x0 ,
u(t) ∈ U (t), t ∈ [S, T ].
The data for this problem comprise an interval [S, T ], functions φ : Rn → R, f : R × Rn ×
× Rm → Rn , and a multifunction U : [S, T ] → Rm . A control function is a measurable function
2609