ОПИСАНИЕ ДИНАМИКИ ЭКОСИСТЕМЫ С ПОМОЩЬЮ
реклама

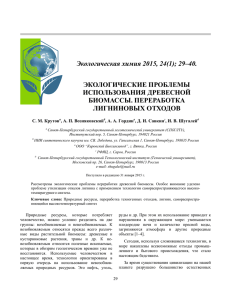
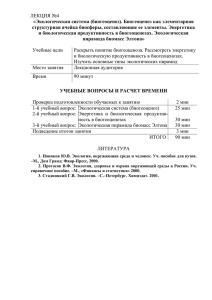
ISSN 1810-0198. Вестник ТГУ, т.19, вып.5, 2014 УДК 502.1:519.711.3 ОПИСАНИЕ ДИНАМИКИ ЭКОСИСТЕМЫ С ПОМОЩЬЮ ЧЕТЫРЕХКОМПОНЕНТНОЙ МАТЕМАТИЧЕСКОЙ МОДЕЛИ А.Н. Флоренсов Ключевые слова: экосистема; трофический уровень; компонент экосистемы; математическая модель; управление; динамика; устойчивость; гомеостазис. На основе количественного описания трофических взаимодействий и предположения о четырех определяющих уровнях этих взаимодействий предложена математическая модель, представляемая системой обыкновенных дифференциальных уравнений. Модель предназначена для эффективного описания количественной динамики и качественных оценок устойчивости экосистем. Выведены соотношения, позволяющие вычислять устойчивость экосистем в зависимости от наблюдаемых удельных скоростей трофических взаимодействий между уровнями системы. Любой подход к изучению экосистемы вынуждает, прежде всего, принимать во внимание множество ее компонентов. Затем оказывается необходимым учитывать различную роль этих компонентов во взаимодействиях, прежде всего трофических, и наличие потоков вещества и энергии между этими компонентами. С позиций математического подхода для этих целей до сих пор широко применялась лишь классическая модель «хищник–жертва», заложенная работами А.Дж. Лотка и В. Вольтерра [1–2], вместе с ее последующими модификациями [3]. Принципиальной особенностью всех указанных моделей является их ограниченность взаимосвязями всего двух искусственно выделяемых компонентов. Накопившиеся методы и современные программно-реализованные вычислительные методы решения систем дифференциальных уравнений дают принципиальную основу для рассмотрения более общих, чем классические модели. Даже при структурно-схематическом рассмотрении любой экосистемы выделяются как минимум два компонента, резко отличающихся отношением к абиотическим основаниям экосистемы. Ими оказываются совокупности автотрофных и гетеротрофных организмов, рассматриваемых как продуценты и консументы. Автотрофы можно рассматривать как 1-й трофический уровень. В свою очередь, трофические особенности консументов практически вынуждают исследователей различать среди них по крайней мере еще три уровня, называя чаще всего относящиеся к первым из них организмы фитофагами (травоядными) и зоофагами (плотоядными). Для пожирателей плотоядных отсутствует всеобщая терминология, нередко этими разновидностями организмов для упрощения даже описательной модели в той или иной степени пренебрегают. Если ограничиваться традиционным подходом первоочередного учета трофических взаимодействий, то логическим расширением модели Лотка–Вольтерра было бы ее обобщение на цепи потребления уже не двух, а трех компонентов. Все же последуем не только элементарной логике расширения, но и примем во внимание, что естественные системы, как правило, 1604 если не всегда, включают в свой состав те или иные подсистемы или механизмы, обеспечивающие замыкание цепей взаимодействия [4]. Такие механизмы с позиций кибернетического подхода обеспечивают гомеостазис всей системы относительно множества внешних для нее естественных воздействий. В качестве такого предварительно несколько умозрительного «уровня» гетеротрофов будем рассматривать совокупность паразитов и сапротрофов. Эта совокупность обеспечивает замыкание потоков питания организмов в экосистеме, потребляя биомассу третьего компонента (зоофагов) и превращая ее в биогенное органическое вещество и неорганические вещества, необходимые для постоянно воспроизводимого функционирования первого компонента экосистемы (фитотрофов). Перейдем к математической модели для четырех указанных компонентов. Будем обозначать количество «обобщенной биомассы» 1-го, 2-го, 3-го и 4-го компонента экосистемы переменными x, y , z и u . Каждое из этих уравнений отражает изменения в приращениях соответствующего ему компонента с учетом трофического взаимодействия с предыдущим и последующем уровнем. При таком взаимодействии k-го и (k+1)-го уровня компонентов xk и xk 1 , первый из них (потребляемый) теряет mxk xk 1 обобщенной биомассы, где m – удельная скорость потребления биомассы в этом взаимодействии, а второй (потребляющий) – столько же приобретает. Кроме того, любой компонент отражает потерю биомассы в результате энергетических и материальных потерь на существование, что выливается в отрицательное составляющее приращения, которое пропорционально массе этого компонента за единицу времени. Соответствующие коэффициенты обозначим c1 , c2 , c3 , c4 . Продуцент, описываемый уравнением изменения переменной x, должен содержать член продуцирования биомассы из неорганических элементов и учет ограниченности абиотических оснований экосистемы, что в предельно упрощенной модели описывается логистическим уравнением. ISSN 1810-0198. Вестник ТГУ, т.19, вып.5, 2014 Отталкиваясь от более ранней авторской модели [5], проведем уточнение действий обратного потока «обобщенной биомассы» от верхнего уровня трофической пирамиды к ее основанию. Этот обратный поток образуется совместным функционированием паразитов и сапрофагов, его результатом являются простейшие органические соединения и неорганические биогенные вещества, необходимые в свою очередь большинству современных продуцентов (растворимые соединения азота, фосфора и т. п.). Они оказываются необходимыми для построения биомассы продуцентов, но в относительно небольшой пропорции относительно результирующей массы. Для включения в модель этого существенного явления будем считать, что рассматриваемый обратный поток от 4-го компонента к 1-му подвергается действию определенного мультипликатора M , обратного к указанной пропорции. В результате получаем следующую систему дифференциальных уравнений: x (ay (bMu d )(1 x / R) c1 ) x , y (ax ez c2 ) y , (1) z (ey hu c3 ) z , u (hz bx c4 )u . Коэффициент a задает удельную скорость потребления биомассы первого компонента при взаимодействии с элементами второго компонента. Коэффициенты e и h задают удельные скорости потребления биомассы второго и третьего компонентов при взаимодействии, соответственно, с элементами третьего и четвертого компонентов. А коэффициент b задает удельную скорость потери биомассы последним компонентом, приводящим к увеличению биомассы первого компонента с удельной скоростью bM , с учетом мультипликатора M . Все коэффициенты следует считать строго большими нуля, хотя в дальнейшем исследовании можно рассматривать поведение модифицированной системы, полученной путем выборочного приравнивания отдельных коэффициентов нулевому значению. Коэффициент d представляет скорость возрастания численного значения первого компонента на основании внешнего источника его снабжения необходимыми элементами (энергией и неорганическим веществом вне биотического происхождения). Фактический вклад этого внешнего фактора d совместно с членом поступления обратного потока питания с вершины трофической пирамиды bMu модифицируется дополнительным членом выражения, соответствующего определяющей логистической зависимости (1 x / R) , что обеспечивает учет ограниченности внешних неорганических ресурсов для продуцентов и количественное значение этой ограниченности, задаваемое величиной R . Практический интерес представляют лишь те решения системы уравнений, которые не меньше нуля, что следует из целевой задачи описания реально существующих объектов и масс. Поэтому первейшее внимание следует уделить нахождению стационарных точек модели, что определяется через нулевые значе- ния правых частей уравнений и приводит к системе уравнений (ay (bMu d )(1 x / R) c1 ) x 0 , (ax ez c2 ) y 0 , (2) (ey hu c3 ) z 0 , (hz bx c4 )u 0 . Здесь возможно тривиальное решение x y z u 0 , которое непосредственного практического значения не представляет, но может теоретически иметь место как результат некоторой динамики из ненулевой исходной точки. В области ненулевых значений переменных имеем систему уравнений для определения стационарной точки ay (bMu d )(1 x / R) c1 0 , ax ez c2 0 , ey hu c3 0 , hz bx c4 0 . (3) Система оказывается нелинейной за счет только первого уравнения, но она распадается на две системы уравнений меньшего порядка, одна из которых сразу же оказывается линейной. Эта система образуется 2-м и 4-м уравнениями системы (3) и записывается в матричном виде как a e x0 c2 b h z c . 0 4 Необходимым условием ее решения оказывается неравенство нулю детерминанта, что дает (ah be) 0 , при выполнении которого получаем решение x0 q(hc2 ec4 ) , z0 q(bc2 ac4 ) , где величина q определяется (4) формулой q 1/(ah be) . Найденное решение для 1-й и 3-й координат стационарной точки позволяет из оставшихся уравнений получить уже линейную систему, описываемую в матричном виде как a bM (1 x0 / R) y0 c1 d (1 x0 / R) . e u c3 h 0 Условием разрешимости этой системы, выражаемым через ненулевой детерминант, является (ah beM (1 x0 / R)) 0 , при выполнении которого получаем решение для еще неопределенных координат y0 g (h(d (1 x0 / R) c1 ) bM (1 x0 / R)c3 ) , u0 g (e(d (1 x0 / R) c1 ) ac3 ) , 1605 ISSN 1810-0198. Вестник ТГУ, т.19, вып.5, 2014 где g 1/(ah beM (1 x0 / R)) – величина, обратная детерминанту последней системы. Отсюда для указанной выше задачи определения стационарной точки системы в области положительных значений координат пространства x , y , z , u вытекают необходимые условия (ah be) 0 , (ah beM (1 q(hc2 ec4 ) / R)) 0 , h(d c1 /(1 q(hc2 ec4 ) / R)) bMc3 , (5) e(d (1 q(hc2 ec4 ) / R) c1 ) ac3 или, как другой вариант при условии g 0 (ah be) 0 , (ah beM (1 q(hc2 ec4 ) / R)) 0 , (6) h(d c1 /(1 q(hc2 ec4 ) / R)) bMc3 , e(d (1 q(hc2 ec4 ) / R) c1 ) ac3 . Рассмотренную математическую модель можно далее исследовать классическими методами качественной теории дифференциальных уравнений. Для области положительных значений переменных системы при выполнении условия (5) или (6) имеется всего одна стационарная точка системы. Линеаризированная для этой точки исходная система уравнений (1) в матричной форме имеет вид x x0 (bMu 0 d ) / R ax0 y ay 0 0 z 0 ez 0 bu 0 0 u 0 ey 0 0 hu 0 x0 bM (1 x0 / R) x . 0 y z hz 0 0 u Нарушение этого требования, согласно первому условию в (5) и (6), ведет к отсутствию стационарной точки фазовых траекторий и неустойчивости динамики системы, что делает указанное условие замыкания необходимым для гомеостазиса экосистемы. Из первого условия стационарности решения (5) вытекает следующее требование, необходимое для устойчивости динамики рассматриваемой модели экосистемы a/b e/h, которое может рассматриваться как требование к отношению пропорций между удельными скоростями трофических потоков между компонентами системы. В содержательной форме это соотношение для естественной экосистемы описывается следующим образом. Отношение удельной скорости a потребления фитофагами к удельной скорости b обратного потока вещества к продуцентам должно быть больше, чем отношение удельной скорости e потребления зоофагами к удельной скорости h потребления паразитами и сапротрофами. При нарушении этого условия экологическая система переходит в неустойчивый вырождающийся режим сокращения одного из ее компонентов, стремящегося к нулю. Основанием последнего заключе- (7) Характер решений этой системы, а следовательно, и характер решений исходной нелинейной системы в окрестности стационарной точки определится характеристическим многочленом матрицы коэффициентов из системы (7). Поведение рассмотренной модели для частных значений параметров может быть отображено в графическом виде с помощью современных вычислительных систем, в частности Scilab. Одно из таких решений представлено фазовыми траекториями в пространствах трех измерений XYZ и XYU на рис. 1, 2 и графиком зависимости решений X , Y от параметра времени на рис. 3. Для наглядности дополнительно приведен отрезок линии, соединяющий проекцию стационарной точки на плоскость XY c ее графическим изображением в рассматриваемой системе координат. В примере видны сложные колебания в модели, характерные для практически изучаемых экосистем, но не порождаемыми в таких формах более простыми математическими моделями. Графики даны для значений параметров a 0,7 , b 0,008 , e 0,7 , h 1,5 , Рис. 1. Фазовая траектория Z c1 0,2 , c2 0,3 , c3 0,3 , c4 0,5 , d 0,65 , R 10 , M 10 . Предположение о необходимости замыкания динамической связи в последовательности трофических взаимодействий, сделанное в самом начале работы, оказывается в уже построенной модели равносильным требованию h 0 . 1606 Рис. 2. Фазовая траектория U ISSN 1810-0198. Вестник ТГУ, т.19, вып.5, 2014 Рис. 3. Графики зависимости от времени 3-й и 4-й компоненты ния является отсутствие в этом случае стационарной точки в области положительных значений координат фазового пространства, а удаление фазовых траекторий «на бесконечность» противоречит уже возможностям физической системы, поскольку экосистема не может увеличивать бесконечно ни один из своих компонентов в реальных условиях ограниченности земных ресурсов. ЗАКЛЮЧЕНИЕ Проведенный анализ показал, что эффективной моделью для количественной динамики и изучения экосистем является система из четырех обыкновенных дифференциальных уравнений, описывающая трофические взаимодействия компонентов. Полученная модель дает возможность исследовать и оценивать текущую устойчивость конкретных экологических систем путем биологических наблюдений и вычислений скорости потребления биомассы между уровнями трофической пирамиды, перекрывая тем самым узкие возможности оценивания этой устойчивости по фактически наблюдаемой количественной изменчивости биомассы компонентов, выражаемой через численность отдельных популяций и среднюю массу их организмов. ЛИТЕРАТУРА 1. 2. 3. 4. 5. Lotka A.J. Elements of Physical Biology. Baltimore: Williams and Wilkins, 1925. 460 p. Volterra V. Variations and fluctuations of the number if individuals in animal species living together // Animal Ecology. N. Y.: MacGrawHill, 1926. Р. 409-448. Rosenzweig M.L. Net primary production of terrestrial communities; prediction from climatological data // Am. Nat. 1968. V. 102. P. 67-74. Флоренсов А.Н. Динамические аспекты информационной компоненты сложных систем. Омск: Изд-во ОмГТУ, 2007. 344 с. Флоренсов А.Н. Математическая модель компонентной динамики для биогеоценозов и социумов // Сб. науч. трудов SWorld. Одесса: Куприенко С.В., 2014. Вып. 1. Т. 30. C. 71-80. Поступила в редакцию 1 июля 2014 г. Florensov A.N. DESCRIPTION OF ECOSYSTEM DYNAMICS USING FOUR-COMPONENT MATHEMATICAL MODEL Based on the quantitative description of trophic interactions and the assumption of four defining levels of these interactions the mathematical model is proposed, represented by a system of ordinary differential equations. The model is designed to effectively describe the dynamics of quantitative and qualitative assessments of the sustainability of ecosystems. The relations are derived to calculate the sustainability of ecosystems depending on specific velocities observed trophic interactions between the levels of the system. Key words: ecosystem; trophic level; ecosystem components; mathematical model; control; dynamics; stability; homeostasis. Флоренсов Александр Николаевич, Омский государственный технический университет, г. Омск, Российская Федерация, кандидат технических наук, доцент, доцент кафедры информатики и вычислительной техники, e-mail: florensov@yandex.ru Florensov Aleksander Nikolayevich, Omsk State Technical University, Omsk, Russian Federation, Candidate of Technics, Associate Professor, Associate Professor of Informatics and Calculating Technics Department, e-mail: florensov@yandex.ru 1607