О формировании реакций в контакте колеса с грунтом
реклама

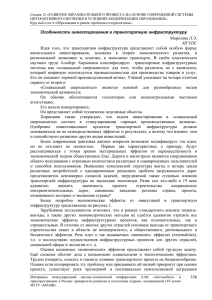
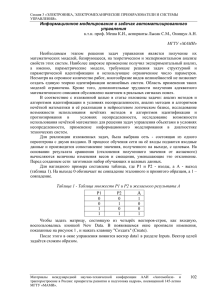
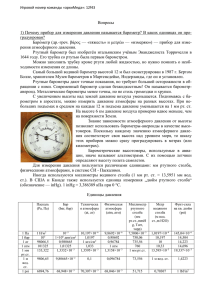
Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ», подсекция «Колесные и гусеничные машины». О формировании реакций в контакте колеса с грунтом на повороте К.т.н. Трояновская И.П. Челябинская государственная агроинженерная академия В состав математической модели движения произвольной транспортной машины, независимо от метода (второй закон Ньютона, принцип Даламбера, уравнение Лагранжа и др.), входят реакции связи, возникающие в контакте движителя с грунтом. Исследованию силового взаимодействия посвящено множество трудов отечественных и зарубежных ученых. Существует несколько методов по описанию формирования сил в контакте. Поскольку в контакте колеса с грунтом на повороте возникает множество элементарных сил трения-сцепления (различных по модулю и направлению), то все способы описания силового взаимодействия, с точки зрения механики, представляют собой решение задачи приведения всех сил к центру, с последующим вычислением равнодействующей силы. Именно при решении этой задачи принимается ряд допущений, ограничивающих в дальнейшем область применения модели движения. Однако, закладывая в основу какуюлибо гипотезу, авторы не всегда декларируют накладываемые ею ограничения, что в последующем затрудняет анализ правильного использования модели. В силу огромного количества существующих на сегодняшний день моделей силового взаимодействия колеса с грунтом на повороте, рассмотрим не сами модели, а основные гипотезы и допущения, закладываемые при решении силовой задачи с точки зрения законов механики и накладываемых на область дальнейшего применения ограничений. 1. Независимое формирование продольной и поперечной силы на колесе. Наиболее широкое применение это допущение получило в моделях поворота управляемых колес с учетом бокового увода [2,12,15,17]. Явление бокового увода было открыто Брюлье в 1925г. и подразумевает отклонение упругой шины от прямолинейного движения под действием боковой силы. Последующий перенос его на криволинейное движение не изменил природу взаимодействия, поэтому увод за счет упругих свойств шины возможен лишь при движении машины с большим радиусом поворота. Поскольку классическая механика применима исключительно для твердых тел, то появление «механики упругого увода» оказалось как нельзя, кстати, для описания пневматического колеса. В основу взаимодействия его с грунтом была положена гипотеза Рокара, подразумевающая линейную зависимость боковой силы Py от угла увода γ и исключающая скольжение относительно грунта: Py = k y 0 γ , (1) где k y0 - коэффициент боковой жесткости пневматической шины. Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 490 Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ», подсекция «Колесные и гусеничные машины». В основе теории бокового увода лежит принцип независимого формирования поперечной Py и продольной Px силы, который согласно законам механики применим только в случае их различной физической природы. Например, боковая сила обусловлена упругими свойствами шины, а продольная качением (ведомого) или сцеплением (ведущего) колеса: r −r Px = o d , kx Px P где k x - коэффициент тангенциальной эластичности колеса, ro , rd - свободный и динамический радиус колес β Это еще раз подтверждает, что теория бокового увода изначально предназначена к применению в области упругой боковой деформации и все последующие попытки учета скольжения в рамках этой теории уже входят в противоречие с исходной гипотезой. Py O Заключение: Рисунок 1 Теория бокового увода, в основе которой лежит принцип независимого формирования поперечной и продольной силы на колесе, подразумевающий различную их физическую природу, применим лишь при составлении модели криволинейного движения колесной машины с большим радиусом поворота, когда колеса катятся без скольжения с упругими боковыми деформациями. Неоднократно предпринимаются попытки учета скольжения в рамках теории бокового увода. Рассмотрим основные сложившиеся на сегодня подходы. 2. Введение связи между продольной и поперечной оставляющей реакции грунта. Поскольку обе силы Px и Py являются составляющими одной реакции со стороны грунта, то они связаны между собой направлением результирующей силы Р (рис.1): Px = P cos β ; Py = P sin β . (2) Однако введение связи (2) между составляющими недостаточно для отказа от принципа суперпозиции. Это наглядно видно на моделях криволинейного движения машины с неповоротными колесами, предложенных Брянским Ю.А. и Петрушовым В.А. [1,9], где все элементарные силы в контакте колеса с грунтом заменены одной результирующей силой Р, наклоненной к плоскости качения под некоторым углом β (рис.2). Увеличение поперечных сил Р у приводит к росту момента сопротивления повороту M c = ∑ Pyi L / 2 (где L - база машины), для преодоления которого требуется развитие большего поворачивающего момента М п = M c , определяемого, в свою очередь Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 491 Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ», подсекция «Колесные и гусеничные машины». через продольные Px тяговые усилия М п = ∑ Pхi B / 2 (где В - колея машины). Таким образом, увеличение одной составляющей Py влечет за собой рост другой Px , что означает сохранение принципа суперпозиции, недопустимого при связях с трением [8]. Такая прямая зависимость между силами Px и Py , возможна лишь при отсутствии ограничения равнодействующей силы по сцеплению (рис.3а), т.е. соответствует упругой области деформации шины (отсутствию скольжения). Ее применение можно рекомендовать для моделей поворота колесных машин с большими радиусами движения, когда результирующая сила не достигает предела сцепления. Использование такого подхода к исследованию машин с бортовым поворотом [1,9] приводит к тому, что для оценки крутого поворота вокруг заторможенного борта в P P2x β P2 P1y ω P1x P3y β P1 P2y Px P Px P Px P P4 β P4x Py Py O Px Py Py O P4y а) б) β P Рисунок 3x Рисунок 3 2 тяжелых грунтовых условиях необходимо проводить дополнительную проверку на возможность осуществления движения по сцеплению. При движении на малых радиусах, особенно у машин с неповоротными колесами, наблюдается повышенное скольжение движителя по грунту. При наличии скольжения равнодействующая сила достигает предела сцепления Р ≤ ϕN и, картина взаимодействия P3 между составляющими принципиально меняется: рост одной составляющей сопровождается падением другой (рис.3б), так как они взаимосвязаны следующим образом: ϕN ≥ P = Px2 + Py2 . (3) где ϕ - коэффициент сцепления, N - вертикальная нагрузка на колесе. Таким образом, прямая зависимость продольной Р х составляющей от поперечной Р у , Ру Руmax сложившаяся в условиях принципа суперпозиции, Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». Рисунок 4 492 S Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ», подсекция «Колесные и гусеничные машины». при наличии скольжения (в рамках ограничений) меняется на обратную. Заключение: При описании взаимодействия со скольжением, составляющие необходимо рассчитывать с учетом ограничения результирующей силы по пределу сцепления, когда рост одной составляющей сопровождается падением другой, так как принцип суперпозиции при связях с трением не выполняется. 3. Введение нелинейной зависимости боковой силы от угла увода. Экспериментально замечено [10], что при увеличении углов увода ( δ > 3 ÷ 50 ) линейный характер зависимости Py теряется (рис.4), что объясняется не увеличением упругих свойств шины, а быстро прогрессирующим боковым скольжением S шины [15]. Поэтому еще один способ учета скольжение в рамках теории бокового увода, получивший широкое применение, это введение нелинейной характеристики боковой силы Py ( γ ) . Примером может служить модель Ю.Б. Веденицкого. Однако, при наличии скольжения S → ∞ поперечная сила выходит на предел сцепления Py = ϕN , что соответствует отсутствию продольной составляющей реакции грунта (силы тяги) Р х = 0 и противоречит самой природе криволинейного движения. На самом деле суммарное смещение колеса на повороте осуществляется не только в боковом направлении, а под некоторым углом β . Это означает, что скольжение начинается при значительно меньшем значении боковой силы Py max < ϕN sin β и, как правило, сопровождается буксованием (продольным скольжением). Поскольку наличие продольной силы Px снижает максимальное значение поперечной силы Py max , при которой начинается скольжение, многие авторы, работающие в рамках теории бокового увода, учитывают это явление через суммарный коэффициент сопротивления боковому уводу k y , характеризующий кроме упругих свойств шины k y0 еще и скольжение: - Калинов А.Я. [4]: k ky = - Яровой В.Г. [18]: k y0 (P − δPx ) δ(k y0 − Px ) + P , δ 1± δ 1 = + , ( ν - коэффициент, учитывающий продольное k y k y0 νPx и поперечное сцепление), - Каран Е.Д. [5]: k ky = k y0 1 − (Px rk / N) 2 , ( rk - радиус колеса). Однако все эти формулы носят эмпирический характер, что при большом их разнообразии затрудняет обоснованный выбор подходящей зависимости. Кроме того, пятно контакта на повороте совершает плоскопараллельное Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 493 Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ», подсекция «Колесные и гусеничные машины». скольжение, и каждая точка следа имеет свое смещение dS , как в продольном dx , так и поперечном dy направлении. Следовательно, в каждой точке возникнет своя элементарная сила dP , нелинейно зависящая от суммарного смещения dS = dx 2 + dy 2 . Поэтому правильнее вводить нелинейную зависимость не для результирующей силы Р или ее составляющих Px , Py , а для элементарных сил в контакте, как это используется в работах В.В. Ларина, Ю.Л. Рождественского и К.Ю. Машкова [6,11] Необходимо также отметить, что пневматическая шина обладает не только боковой упругостью, но и продольной (тангенциальной эластичностью), у которой качественный характер зависимости силы от смещения аналогичен (рис.4) представленному в поперечной плоскости [12,15]. Поэтому введение нелинейного характера реакции со стороны грунта должно затрагивать обе ее составляющие, как это отражено в модели Ю.Л. Рождественского и К.Ю. Машкова [11]. Заключение: При учете скольжения введение нелинейной зависимости силы от смещения должно осуществляться на уровне элементарных сил в контакте, а не применительно к результирующей силе или ее составляющим. Кроме того, введение нелинейного характера должно затрагивать одновременно обе составляющие: в продольном и поперечном направлении. Введение нелинейной зависимости только для одной результирующей боковой силы может привести к серьезным ошибкам. 4. Приведение элементарных сил к одной равнодействующей в центре контакта. Если элементарные силы расположены в одной плоскости, то их можно привести к одной равнодействующей, вопрос заключается только в определении точки приложения этой силы [13]. Px P Чаще всего равнодействующую силу прикладывают в центре площадки контакта колеса с грунтом. Такое допущение встречается не только в моделях с управляемыми колесами [12,17], но при описании криволинейного движения машин с бортовым поворотом (рис.2), например в трудах Брянского Ю.А., Py O M Машкова К.Ю., Певзнера Я.М., Петрушова В.А. Рождественского Ю.Л., Фаробина Я.Е. и др. [1,9,11,17]. ω Однако, под действием силы, приложенной в центре масс (давлений), тело может совершать Рисунок 6 только поступательное движение, оставаясь всегда параллельно самому себе (рис.5а), что P противоречит криволинейному движению [13]. P В общем случае равнодействующая имеет некоторое Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». а) б) Рисунок 5 494 Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ», подсекция «Колесные и гусеничные машины». смещение относительно центра площадки. Именно за счет него тело совершает плоское, а не поступательное скольжение с характерным поворотом площадки контакта (рис.5б). В самом общем случае результатом приведения элементарных сил трения к центру контакта колеса с грунтом кроме результирующей силы Р является еще и результирующий момент сопротивления повороту M (рис.6), получаемый за счет смещения равнодействующей. Когда смещение мало, моментом можно пренебречь. Однако это допущение правомерно лишь при движении машины с очень большими радиусами поворота, когда наблюдается малый поворот пятна контакта колеса. Заключение: Приведение всех элементарных сил к одной равнодействующей силе, приложенной в центре контакта, соответствует поступательному скольжению колеса и может быть допустимо лишь при описании движения колесной машины с большим радиусом поворота. Для моделей криволинейного движения машин с неповоротными колесами пренебрежение моментом сопротивления повороту шины можно считать достаточно грубым и недопустимо. Рассмотрим, как формируется момент трения в результате задачи приведения. 5. Модели, учитывающие момент сопротивления повороту с результирующей силой. Отсутствие моментов М сопротивления повороту каждого колеса иногда пытаются компенсировать введением общего момента M c сопротивления повороту всей машины. Для машин с неповоротными колесами [14], как правило, используют формулу, заимствованную у гусеничных машин: Ì c = μGb / 4 Рxn (4) Рyn где b – длина следа колес, G - вес машины, μ - коэффициент сопротивления повороту, рассчитываемый по формуле Никитина: μ= ϕó a + (1 − a )(ρ + 0,5) O Mc Рx3 Рy3 , Рисунок 7 a - эмпирический коэффициент, ρ = R / B - отношение радиуса поворота R к колее машины В, ϕ y - максимальный коэффициент сцепления в поперечном направлении. Что касается машин с управляемыми колесами, то традиция использования момента сопротивления повороту M c общего для всей машины возникла в связи с приведением всех сил к условному колесу в центре оси (рис.7), когда в состав M c , кроме Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 495 Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ», подсекция «Колесные и гусеничные машины». моментов М трения сопротивления повороту пятна контакта колес относительно грунта, входят еще дополнительно моменты от кинетического M c1 (k yo ) и силового M c 2 (Py ) увода колес, а также момент M c3 (Px ) от перераспределения тяговых усилий на колесах одной оси [7,12,17]. Моменты М сопротивления трению скольжению при повороте пятна контакта колеса у разных авторов имеют разные эмпирические зависимости: dP dP P M - Литвинов А.С. [7]: M = 0,375ϕN F ( F площадь пятна контакта колеса с грунтом), - Львов Е.Д.: M = Px d 2 1− δ ( δ - буксование, aδR d - ширина следа), а) б) Рисунок 8 - Тураев Х.Т.: М = ϕмδ ( ϕм - коэффициент угловой жесткости шины), - Фаробин Я.Е. [17]: M = M max ( M max - момент при повороте колеса на 0,925 + 0,15ρ месте), - Смирнов Г.А. [12]: M = 2ϕNb , 3π(1 + 0,15ρ) b Py . 6 Несмотря на большое разнообразие формул по расчету момента сопротивления повороту пятна контакта колеса относительно грунта, суммирование его с предельной по сцеплению результирующей силой трения неправомерно законам классической механики. Рассмотрим процесс приведения подробнее. Сила Р является результатом сложения - Редчиц В.В.: Ì = элементарных сил dPp , одинаковых по величине и направлению (рис.8а). Если результирующая сила достигла предела по сцеплению P = ϕN , то и каждая элементарная сила тоже должна быть на пределе сцепления dPp = ϕdN . Момент М тоже является результатом сложения других элементарных сил dPì , различных по направлению (рис.8б). Чтобы получить в результате приведения результирующую силу Р и результирующий момент М необходимо все элементарные силы в каждой точке контакта векторно сложить dP = dPp + dPì . Однако, достижение одной из составляющих предела сцепления dG возможно лишь только при отсутствии другой: Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 496 Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ», подсекция «Колесные и гусеничные машины». dÐp = ϕdG → dPì = 0 или dÐì = ϕdG → dPð = 0 . (5) Условия (5) доказывают, что результирующая сила достигает своего предельного по сцеплению значения только при отсутствии момента, т.е. в прямолинейном движении. С другой стороны, при повороте (скольжении) вокруг геометрического центра происходит при отсутствии результирующей силы (предела сцепления достигают элементарные силы составляющие момент). В самом общем случае при плоскопараллельном скольжении величины результирующей силы и момента трения взаимосвязаны: чем больше момент, тем меньше результирующая сила. Поэтому добавление момента сопротивления повороту к предельной по сцеплению результирующей силе трения приводит к нарушению закон Кулона в точке. Заключение: Так как результирующая сила и момент являются результатом операции приведения элементарных сил трения-сцепления к единому центру и имеют единую физическую природу (реакции со стороны грунта на движитель), то они ограничены по сцеплению в своей совокупности. Результирующая сила может достигать своего предельного по сцеплению значения только в прямолинейном движении, на повороте ее значение всегда меньше предельного. Модели с результирующим моментом трения при предельной результирующей силе могут применяться при описании криволинейного движения машины, когда момент трения сопротивления невелик, т.е. при движении по твердым опорным поверхностям с большими и средними радиусами поворота. При исследовании крутых поворотов (на малых радиусах движения) формирование силовых факторов необходимо проводить в соответствии механики трения. 6. Формирование силовых факторов на основе математической теории трения. Математическая теория сухого трения была разработана Ф.А. Опейко [8] на основе трудов Шиллера Н.Н. (1892г) и Жуковского Н.Е. (1897г) и уже получила распространение при описании криволинейного движения гусеничных машин и колесных с неповоротными опорами [3]. Рассмотрим задачу приведения на основе законов механики. Скольжение площадки контакта любого движителя (колеса) при повороте машины представляет собой плоскопараллельное (мгновенно вращательное) движение. Возникающие в контакте элементарные силы трения (сцепления) dP , направленные в обратную сторону относительного движения. При мгновенно вращательном скольжении скорость V каждой точки направлена перпендикулярно расстоянию r ее до мгновенного центра скольжения (т.С рис.9). Проекции элементарной силы dP на продольную и поперечную плоскости колеса равны: Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 497 Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ», подсекция «Колесные и гусеничные машины». dPx = dP sin α , dPy = −dP cos α . (6) Функции угла легко выражаются через координаты мгновенного центра x , y и рассматриваемой точки ξ, η : sin α = y−η , r cos α = x−ξ , r (7) где r = ( x − ξ) 2 + ( y − η) 2 - расстояние элементарной точки до мгновенного центра скоростей. Учитывая, что при скольжении закон Кулона выполняется в каждой точке (все элементарные силы достигают максимального по сцеплению значения), после подстановки (9) в (8) получаем значения проекций элементарных сил трения: dPx = ϕ y−η 2 ( x − ξ) + ( y − η) 2 dN , dPy = −ϕ x−ξ 2 ( x − ξ) + ( y − η) 2 dN (8) Приведем все элементарные силы к единому центру, в качестве которого возьмем мгновенный центр скоростей. Тогда проекции результирующей силы и результирующий момент равны: Px = ϕ N ∫∫ F ηξ Py = −ϕ M=ϕ y−η dξdη , (9) N x−ξ dξdη , ∫ ∫ F ηξ ( x − ξ) 2 + ( y − η) 2 (10) ( x − ξ) 2 + ( y − η) 2 N ( x − ξ) 2 + ( y − η) 2 dξdη , ∫ ∫ F ηξ (11) где F - площадь пятна контакта. Приведенные к центру следа колеса результирующая сила Р и результирующий момент Мо трения приобретают вид: ⎫⎪ P = Px2 + Py2 ⎬, M o = M − xTy + yTx ⎪⎭ Рассмотрим предельные случаи: мгновенный центр совпадает (12) X dP с геометрическим центром пятна контакта ( х = у = 0 ). В этом случае обе составляющие силы трения равны нулю ( Px = Py = 0 ) и мы имеем только один момент ( Mo = max ), что соответствует чистому вращению колеса вокруг геометрического центра следа; - мгновенный центр скольжения находится в Мо(х,у)x Px dPx Рисунок 10 α dF ξ dPy V O η C r Р(х,у) α Py M y Y ω Рисунок 9 Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 498 Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ», подсекция «Колесные и гусеничные машины». бесконечности ( r → x 2 + y 2 ), тогда момент трения относительно центра площадки стремиться к нулю M o → 0 , а сила достигает предельного по сцеплению значения P → ϕN , что соответствует мгновенно поступательному движению. Зависимости силы Р и момента Мо от координат мгновенного центра скольжения х,у в объемном виде представлена на рис.10, где хорошо видно, что при малых координатах х,у наблюдается интенсивный рост момента трения, сопровождаемый значительным падением силы. Другими словами, взаимосвязь между силой и моментом наиболее активно проявляется там, где наблюдается повышенный момент сопротивления, т.е. на малых радиусах поворота колеса. Согласно механике трения силовые факторы Px , Py , M в контакте движителя с грунтом являются функциями (9-11) координат х,у мгновенных центров скольжения. Это сводит силовую задачу к кинематической и позволяет решать их совместно. Доказанная Опейко Ф.А. [8] теорема «о положении мгновенных центров для параллельно-поступательно движущихся тел» позволила применить законы математической теории трения к описанию взаимодействия движителя с грунтом для гусеничной машины [8] и колесной с неповоротными опорами [3]. Распространение на колесные машины с управляемыми колесами или шарнирно сочлененной рамой [16] пока ограничено в силу недостатка необходимых уравнений связи, накладываемых на неизвестные координаты х,у. Заключение: Формирование силовых факторов на основе математической теории трения позволяет учесть скольжение колеса по грунту согласно законам механики. Однако описание силового взаимодействия на основе сухого трения не отражает упругие свойства пневматической шины и деформацию грунта. 6. Введение нелинейности удельных параметров. Ограниченностью механики трения является то, что она описывает взаимодействие абсолютно твердых тел. В действительности и пневматическая шина и грунт обладают некоторой упругостью. Учесть упругие свойств взаимодействия можно введением переменных коэффициентов ϕ под знак интеграла в формулах (9-11). В таком случае ϕ перестает быть коэффициентом трения сцепления, а приобретает смысл элементарной удельной силы ϕ = dP / dN . Зависимость элементарной удельной силы ϕ(S) от смещения (рис.11) широко используется при описании деформативных свойств грунта и у разных авторов описывается следующими функциями: ( ) - Рождествеский Ю.Л., Машков К.Ю. [11]: ϕ = ϕ m 1 − a 1e −a 2 dS / ϕ , - Умняшкин В.А., Филькин Н.М. ϕ = ϕ o + a 1dSa 2 e −a 3 ds , Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 499 Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ», подсекция «Колесные и гусеничные машины». 2 ⎛ - Ларин В.В. [6]: ϕ = ϕ m ⎜1 − e − a 1dS + a 2 e − a 3 dS ⎝ - Кацыгина В.В. ⎞ ⎟, ⎠ [16]: ϕ ϕm ⎛ ⎞ ⎛ dS ⎞ a1 ⎟⎟ th ⎜⎜ ⎟⎟ , ϕ = ϕ m ⎜⎜1 + ⎝ ch (dS / a 2 ) ⎠ ⎝ a 2 ⎠ - ( ϕ = ϕ m a1e Покровский −a 2 dS )( + a3 1− e − a 4 dS ), Г.И.: где a1 , a 2 , a 3 , a 4 - эмпирические коэффициенты. Мо(х,у) Р(х,у) Рисунок 12 Рисунок 11 S Поскольку все функции являются эмпирическими, то выбор наиболее рациональной, как правило, проводится по критерию наименьшего числа используемых коэффициентов. Формулы Рождественского Ю.Л. и Кацыгина В.В. имеют всего по два эмпирических коэффициента. Однако формула Кацыгина В.В. позволяет описать сразу обе кривые, представленные на рис.11, характеризующие рыхлый ( a 1 = 0 ) или пластичный ( a 1 ≠ 0 ) тип грунта, чем выгодно отличается от всех остальных. Использование функции Кацыгина В.В. в подынтегральных зависимостях (9-11) позволяет учесть упругие свойства пневматической шины и деформацию грунта. Силовые факторы Px , Py , M приобретают вид: Px = ⎛ ⎞ ⎛ dS ⎞ a1 N y−η ⎟⎟th ⎜⎜ ⎟⎟ ϕ m ⎜⎜1 + dξdη , ∫ ∫ F ηξ ⎝ ch (dS / a 2 ) ⎠ ⎝ a 2 ⎠ ( x − ξ) 2 + ( y − η) 2 Py = − M= ⎛ ⎞ ⎛ dS ⎞ a1 N x−ξ ⎟⎟ th ⎜⎜ ⎟⎟ ϕ m ⎜⎜1 + dξdη , ∫ ∫ F ηξ ⎝ ch (dS / a 2 ) ⎠ ⎝ a 2 ⎠ ( x − ξ) 2 + ( y − η) 2 ⎛ ⎞ ⎛ dS ⎞ a1 N ⎟⎟ th ⎜⎜ ⎟⎟ ( x − ξ) 2 + ( y − η) 2 dξdη . ϕ m ⎜⎜1 + ∫ ∫ ( ) ch dS / a F ηξ 2 ⎠ ⎝ a2 ⎠ ⎝ (13) (14) (15) Построение 3D моделей в том же масштабе (рис.12) позволяет наглядно увидеть, что наличие упругости шины расширяет область взаимозависимости результирующей силы от момента. Для наглядности области распространения выявленной зависимости результирующей силы от величины момента трения внизу наложен квадратный след размером 8х8 см. (рис.12). Дополнительный учет деформативных свойств грунта еще более расширит область взаимной зависимости силы от момента трения. Согласно предложенному подходу был проведен силовой расчет криволинейного движения малогабаритного трактора «Уралец» производства ЧТЗ на твердом основании [16]. Конструкция минитрактора позволяет осуществлять поворот посредством управления передними ведомыми колесами и дополнительного торможения задним внутренним колесом. Исследования показали, что даже на тормозном колесе (при 100% скольжении) результирующая сила составляет всего 70% предела сцепления. Данные подтверждены экспериментом. Это объясняется тем, что на повороте за счет Материалы международной научно-технической конференции ААИ «Автомобиле- и 500 тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ», подсекция «Колесные и гусеничные машины». присутствия момента трения результирующая сила всегда меньше, чем при прямолинейном движении. Заключение: Учет упругих свойств взаимодействия пневматической шины и грунта в рамках математической теории трения возможен введением в подынтегральные зависимости переменного коэффициента ϕ , имеющего смысл элементарной удельной силы. Для описания зависимости удельной силы ϕ(S) от смещения наиболее рационально использовать функцию Кацыгина В.В., R ,ì имеющую минимальное число (два) 9 эмпирических коэффициентов и î á ë à ñòü î á ë à ñòü 8 ñêî ë ü æå í è ÿ ñêî ë ü æå í è ÿ позволяющую описывать взаимодействие 7 шины с любым (рыхлым или пластичным) 6 типом грунта. 5 7. Отличительные особенности и 4 преимущества предложенного подхода 3 В основе предложенного подхода 2 çî í à лежат законы механики трения (а не óï ð óãî ñòè гипотезы), что расширяет область его 0 ,5 1 1 ,5 0 -0 ,5 -1 -1,5 -2 применения на движение с малыми Рисунок 13 радиусами поворота. Представленная на рис. 13 диаграмма показывает графическую зависимость радиуса кривизны траектории колеса R от γ увода [16], где внутренняя область соответствует режимам движения в зоне упругих деформаций шины, а внешняя (заштрихованная) - движению со скольжением. Расчет параметров поворота малогабаритного трактора «Уралец» показал, что при повороте с минимальным радиусом даже передние ведомые колеса (пунктирные линии) движутся в области скольжения, что тем более справедливо для ведущего и тормозного задних колес. 1. Сведение силовых факторов к кинематике плоского движения в рамках ограничений приводит к совместному решению силовой и кинематической задачи, что полностью отражает природу этих явлений – их взаимосвязь и взаимовлияние. В существующих моделях (теория бокового увода) для учета взаимной зависимости силовой и кинематической задачи требуются многочисленные итерации, необходимость в которых сейчас отпадает. 2. Использование различных коэффициентов сцепления вдоль и поперек площадки контакта позволяет легко учесть анизотропию взаимодействия [8,16], что позволит учитывать особенности протектора. 3. Описание силовых факторов индивидуально для каждого колеса позволяет рассмотреть его режим движения (ведомый, ведущий, тормозной). Использование интегральных зависимостей (13-15) позволяет учесть форму и размеры пятна контакта, Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 501 0 Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ», подсекция «Колесные и гусеничные машины». путем изменения пределов интегрирования. Введение нормального давления q = N / F под знак интеграла позволит учесть любой закон распределения давления по площадке контакта. 4. Введение зависимости удельной силы от скольжения ϕ(S) позволяет единообразно учесть упругие свойства движителя (пневмошины) и грунта. 5. Вычисление силовых факторов Px , Py , M через координаты (х,у) мгновенных центров скольжения соответствует появлению дополнительных неизвестных. В общем случае увеличение числа неизвестных не приветствуется в силу необходимости составления дополнительных уравнений связи, однако ведущее ведомое введение этих уравнений позволит в дальнейшем Рисунок 14 описать влияние конструктивных параметров машины и ее системы управления на параметры криволинейного движения [16], что расширяет круг описываемых машин. 6. Использование переменной удельной силы позволяет выделить в контакте зоны сцепления и скольжения колеса с грунтом в зависимости от положения мгновенного центра скольжения. На рис.14 приведен пример распределения зон упругого качения и скольжения в пятне контакта для ведомого и ведущего колеса. Литература 1. Брянский Ю.А. Поворот колесных тягачей с неповоротными колесами // Строительные и дорожные машины, 1962, №7. 2. Гладов Г.И., Основы теории криволинейного движения и проектирования систем управления поворотом большегрузных транспортно-технологических агрегатов // Автореф. дис. … докт. техн. наук, М.: МАДИ(ТУ), 1998. – 40 с. 3. Казаченко Г.В. Исследование поворота колесных машин с бортовой схемой управления: Автореф. дис. … канд. техн. наук, БГПИ, Минск: БПУ, 1982. – 21 с. 4. Калинов А.Я. Расчетная оценка и оптимизация управляемости машиннотракторных агрегатов на базе колесных универсально - пропашныхъ тракторов // Автореф. дис. … канд. техн. наук, М.:НАТИ, 1989. – 24 с. 5. Каран Е.Д. Исследование криволиненого движения пневмоколес по деформируемым опорным поверхностям, Автореф. дис. … канд. техн. наук, М.: МАДИ, 1970. – 26 с. 6. Ларин В.В. Методы прогнозирования и повышения опорной проходимости многоосных колесных машин на местности: Автореф. дис. … докт. техн. наук, М.: МГТУ, 2007. – 32с. 7. Литвинов А.С., Ротенберг Р.Ф., Фрумкин А.К. Шасси автомобиля, М.: Машгиз, 1963. Материалы международной научно-технической конференции ААИ «Автомобиле- и 502 тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ», подсекция «Колесные и гусеничные машины». 8. Опейко Ф.А. Колесный и гусеничный ход. Минск: АСН БССР, 1960. – 228 с. 9. Петрушов В.А. Особенности поворота колесных самоходов типа 4х4 с неповоротными колесами, НАМИ, 1959. 10. Работа автомобильной шины / Кнороз В.И. и [др.] / М.: Транспорт, 1976. – 238 с. 11. Рождественский Ю.Л., Машков К.Ю. О формировании реакций при качении упругого колеса по недеформируемому основанию в режимах бортового поворота // Тр. МВТУ, №390: Вопросы расчета и конструирования гусеничных машин, М., 1982, с. 56 63. 12. Смирнов Г.А Теория движения колесных машин. М.: Машиностроение, 1981.– 272с. 13. Тарг С.М. Краткий курс теоретической механики. М.: Высшая школа, 1986. – 416 с. 14.Чудаков Д.А. Основы теории и расчета трактора и автомобиля, М.: Колос, 1972–384с. 15. Чудаков Е.А. Влияние боковой эластичности колес на движение автомобиля, М.Л.: АН СССР, вып.10, 1947. – 125 с. 16. Трояновская И.П. Повышение эффективности малогабаритного погрузчика путем улучшения его поворотливости: Автореф. дис. канд. техн. наук, Челябинск: ЧГАУ, 2002–16с. 17.Фаробин Я.Е. Теория поворота транспортных машин, М.: Машиностроение, 1970-176с 18. Яровой В.Г. Исследование бокового увода тракторных шин и его влияния на некоторые показатели криволинейного движения агрегата // Автореф. дис. … канд. техн. наук, Харьков: ХПУ, 1970. – 21 с. Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 503