Тестовые задания (Структура механизмов)
реклама
")
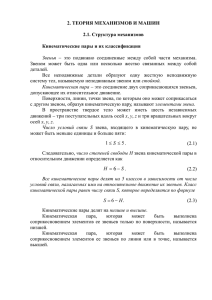
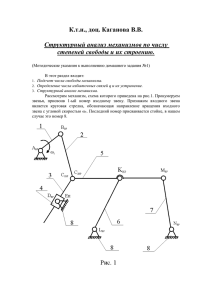
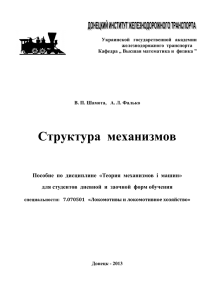
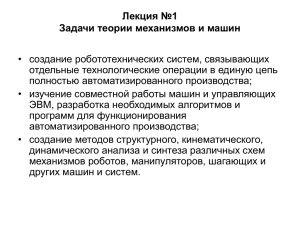
ТЕСТОВЫЕ ЗАДАНИЯ по структуре и классификации механизмов 1. Основные понятия и определения Задание 1. … – устройство, выполняющее механические движения для преобразования энергии, материалов и информации. 1) механизм; 2) кинематическая пара; 3) узел; 4) машина. Задание 2. Машины (по выполняемым ими функциям) можно разделить на следующие классы: 1) энергетические, рабочие, информационные ; 2) энергетические, рабочие, информационные, кибернетические; 3) энергетические, рабочие, аналитические, информационные, кибернетические. Задание 3. Система тел, предназначенная для преобразования механического движения, называется … . 1) техникой; 2) машиной; 3) механизмом. Задание 4. В ... механизме все подвижные звенья описывают неплоские траектории или траектории, лежащие в пересекающихся плоскостях. 1) 2) 3) 4) пространственном; плоском; линейном; симметричном. Задание 5. Механизм… . 1) не выполняет работу; 2) выполняет положительную работу; 3) выполняет отрицательную работу. Задание 6. Механизм от кинематической цепи отличается … . 1) наличием двух неподвижных звеньев (стоек); 2) наличием неподвижного звена (стойки); 3) отсутствием неподвижного звена. Задание 7. На рис. 1 показан механизм … . 1) сложный; 2) плоский; 3) пространственный. Рис.1 Задание 8. Механизм (рис. 2 а) преобразует движение … . 1) вращательное в поступательное; 2) вращательное во вращательное; 3) поступательное во вращательное. Рис. 2 Задание 9. Механизм (рис. 2 б) является … . 1) кулисным; 2) ползунным; 3) кулачковым. 2. Звенья рычажных механизмов Задание 1. Звенья механизма – это… 1) подвижное соединение двух соприкасающихся деталей; 2) твердые тела, из которых образуется механизм; 3) части механизма или машины, изготовленные без применения сборочных операций. Задание 2. Кривошип – это подвижное звено, образующее … . 1) со стойкой вращательную пару и поворачивающееся на 360о; 2) со стойкой вращательную пару и поворачивающееся на угол менее 360о; 3) со стойкой поступательную пару. Задание 3. Коромыслом называют звено, … . 1) движущееся по кулисе; 2) качающееся относительно стойки; 3) совершающее сложное вращательно-поступательное движение. Задание 4. Шатуном называют звено, … . 1) перемещающееся по кулисе; 2) совершающее плоское вращательно-поступательное движение; 3) качающееся относительно стойки. Задание 5. Звено 3 (рис. 3) является 1) деталью; 2) кривошипом; 3) промежуточным; 4) шатуном. Рис. 3 Задание 6. Кулисой называют … . 1) подвижную направляющую; 2) неподвижную направляющую; 3) звено, движущееся по ползуну. Задание 7. Кулисой (рис. 2, б) является … . 1) звено 1; 2) звено 2; 3) звено 3. Задание 8. Выходным называют … 1) звено, которому сообщается преобразуемое движение; 2) звено, которому сообщают отрицательную работу приложенные к ним внешние силы; 3) звено, совершающее движение, для выполнения которого предназначен механизм. Задание 9. Входным будет … . 1) звено, которому сообщается преобразуемое движение; 2) звено, совершающее движение, для выполнения которого предназначен механизм; 3) звено, которому сообщают положительную работу. Задание 10. Ведущим звеном называют … . 1) звено, которое передает движение; 2) звено, которому сообщается преобразуемое движение; 3) звено, которому сообщают положительную работу. Задание 11. … является ведомым звеном. 1) звено, которому сообщают отрицательную работу приложенные к ним внешние силы; 2) звено, которому сообщают положительную работу; 3) звено, которому сообщается преобразуемое движение. 3. Кинематические пары Задание 1. Кинематической парой называют … . 1) подвижное соединение двух соприкасающихся звеньев; 2) жесткое соединение двух соприкасающихся звеньев; 3) вращающееся соединение двух и более соприкасающихся звеньев. Задание2. К признаку классификации кинематических пар на высшие и низшие относят ... . 1) характер движения звеньев; 2) число степеней свободы; 3) наличие избыточных связей; 4) характер соприкосновения звеньев. Задание 3. Звенья высшей кинематической пары соприкасаются … . 1) 2) 3) 4) по линии; по касательной; по поверхности; в точке. Задание 4. Звенья низшей кинематической пары соприкасаются ... . 1) 2) 3) 4) по поверхности; по касательной; по линии; в точке. Задание 5. Число условий связей (ограничений) в кинематической паре … 1) S ∑ > 5; 2) 1 ≤ S∑ ≤ 5; 3) 1 < S∑ < 5. Задание 6. Число степеней свободы кинематической пары определяется соотношением … . 1) H = 6 – S∑; 2) H = 6 + Sп; 3) H = 6 · S∑; 4) H = 6 / S∑. Задание 7. Кинематическая пара (рис. 4 а) имеет степень подвижности равную 1) 1 2) 3 3) 2 4) 5 Рис. 4 Задание 8. Кинематическая пара (рис. 4 б) является … . 1) высшей; 2) низшей; 3) пространственной. Задание 9. Кинематическая пара (рис. 5) имеет…. класс. 1) третий; 2) второй; 3) четвертый. Рис.5 Задание 10. Вращательно-поступательная изображена на … . 1) рис. 6 2) рис. 7 3) рис. 8 низшая кинематическая пара Рис. 6 Рис. 7 Рис. 8 Задание 11. Кинематическая пара, приведенная на рис. 7, является … . 1) высшей; 2) низшей; 3) сложной. Задание 12. На рис. 6 изображена … кинематическая пара. 1) цилиндрическая; 2) вращательная; 3) поступательная; 4) вращательно-поступательная. Задание 13. Степень подвижности кинематической пары, изображенной на рис. 9, равняется … . 1) двум; 2) трем; 3) пяти. Рис. 9 Рис. 10 Рис. 11 Задание 14. Степень подвижности кинематической пары (рис. 10) равняется … . 1) двум; 2) трем; 3) пяти. Задание 15. Кинематическая пара (рис. 11) имеет число условий связи, равное … . 1) трем; 2) двум; 3) одному. Задание 16. Кинематическая пара, имеющая одну связь, — это ... пара. 1) 2) 3) 4) 5) пятиподвижная; одноподвижная; двухподвижная; трехподвижная; четырехподвижная. 4. Кинематические цепи Задание 1. Кинематическая цепь – это … . 1) система звеньев, образующих между собой кинематические соединения; 2) система звеньев, образующих между собой кинематические связи; 3) система звеньев, образующих между собой кинематические пары. Задание 2. На рис. 12 в показана … кинематическая цепь. 1) простая замкнутая; 2) сложная замкнутая; 3) простая разомкнутая. Задание 3. На рис. 12 д изображена … кинематическая цепь. 1) простая замкнутая; 2) сложная замкнутая; 3) пространственная замкнутая; 4) пространственная разомкнутая. Задание 4. На рис. 12 … изображена сложная плоская кинематическая цепь 1) б, в, г; 2) б, в, д; 3) б, г. а) б) г) в) д) Рис. 12 Задание 5. Кинематическая цепь, …, называется простой. 1) в которой имеется хотя бы одно звено, входящее более чем в две кинематические пары; 2) в которой каждое звено входит не более чем в две кинематические пары; 3) в которой каждое звено входит, по крайней мере, в две кинематические пары; 4) в которой есть звенья, входящие в одну кинематическую пару. Задание 6. Кинематическая цепь, …, называется сложной. 1) в которой есть звенья, входящие в одну кинематическую пару; 2) в которой имеется хотя бы одно звено, входящее более чем в две кинематические пары; 3) в которой каждое звено входит, по крайней мере, в две кинематические пары; 4) в которой каждое звено входит не более чем в две кинематические пары. Задание 7. Кинематическая цепь отличается от механизма … . 1) наличием одного неподвижного звена (стойки); 2) наличием подвижных звеньев; 3) отсутствием неподвижного звена; 4) наличием двух стоек. 5. Структурный анализ механизмов Задание 1. Номер семейства механизма определяется … . 1) числом степеней свободы всех звеньев механизма; 2) числом общих условий связи, которые наложены на все звенья механизма; 3) числом вращающихся и поступательных пар, входящие в кинематическую схему механизма. Задание 2. Число степеней свободы плоского рычажного механизма определяют по формуле ... . 1) 2) 3) 4) Малышева – Сомова; Новикова; Рело; Чебышева. Задание 3. Плоский рычажный механизм, структурная формула которого имеет вид I1→ III4,5,6,7 → II2,3, – является механизмом ... класса. 1) 2) 3) 4) первого; второго; третьего; шестого. Задание 4. Формула Чебышева для расчета плоского механизма имеет вид … 1) W = 3n + 2p5 – p4; 2) W = 3n – 2p5 – p4; 3) W = 6n – 5p5 – 4p4 – 3p3 – 2p2 – p1; 4) W = 6n + 5p5 + 4p4 + 3p3 + 2p2 + p1. Задание 5. Структурная формула кинематической цепи общего вида имеет вид… . 1) W = 3n – 2p5 – p4; 2) W = 6n – 5p5 – 4p4 – 3p3 – 2p2 – p1; 3) W = 3n + 2p5 – p4; 4) W = 6n + 5p5 + 4p4 + 3p3 + 2p2 + p1. Задание 6. Степень подвижности структурной группы Ассура первого вида второго класса равна ... . 1) 1 2) 0 3) 2 4) 3 Задание 6. Степень подвижности структурной группы Ассура третьего класса равна ... . 1) 2) 3) 4) 3 0 2 1 Задание 7. Степень подвижности механизма первого класса равна ... . 1) 0 2) 1 3) 2 4) 3 Задание 8. Число подвижных звеньев n в простой группе Ассура и число кинематических пар пятого класса p5 связаны соотношением ... . 1) n/ p5 = 2/3; 2) n/ p5 = 1/2; 3) n/ p5 = 3/2; 4) n/ p5 = 4/6. Задание 9. Укажите правильную последовательность выполнения структурного анализа плоского механизма: 1) разбивка механизма на структурные группы Ассура; 2) определение числа степеней свободы механизма; 3) построение структурной формулы механизма; 4) выявление избыточных связей. Ответы: 1) 1 – 2 – 3 – 4; 2) 4 – 2 – 1 – 3; 3) 2 – 1 – 4 – 3; 4) 1 – 3 – 4 – 2. Задание 10. Кинематическая цепь с нулевой степенью подвижности, не распадающаяся на более простые цепи, обладающие также нулевой степенью подвижности, называется … . 1) группой Жуковского; 2) группой Ассура; 3) группой Чебышева. Задание 11. Группа Ассура содержит только … . 1) четное число звеньев; 2) нечетное число звеньев; 3) любое число звеньев. Задание 12. Группы Ассура бывают … . 1) подвижными и неподвижными; 2) простыми и сложными; 3) вращательными и поступательными. Задание 13. В формуле П. Л. Чебышева W = 3n – 2p5 – p4 буквой n обозначают … . 1) количество неподвижных звеньев; 2) количество подвижных звеньев; 3) общее количество подвижных и неподвижных звеньев. Задание 14. Номер класса механизма должен соответствовать … . 1) классу наиболее простой группы Ассура, входящей в механизм; 2) классу наиболее сложной группы Ассура, входящей в механизм; 3) классу начального механизма группы Ассура, входящему в механизм. Задание 15. Степень подвижности кулачкового механизма (рис. 13) равна … . 1) 1 2) 2 3) 3 Рис.13 Задание 16. Класс сложной группы Ассура определяется … . 1) классом наиболее сложной кинематической пары; 2) количеством кинематических пар, образующих наиболее сложный замкнутый контур; 3) количеством входящих в группу Ассура звеньев. Задание 17. Степень подвижности начального механизма равняется … . 1) 1 2) 0 3) 2 Задание 18. Начальные механизмы иначе называют … . 1) простейшими; 2) сложными; 3) подвижными. Задание 19. Начальный вращательный механизм состоит из … . 1) вращательной кинематической пары; 2) стойки, вращательной кинематической пары и подвижного звена; 3) стойки и вращательной кинематической пары. Задание 20. Начальный поступательный механизм состоит из … 1) поступательной кинематической пары; 2) стойки, поступательной кинематической пары и подвижного звена; 1) стойки и поступательной кинематической пары.