сравнительные свойства переходных кривых
реклама

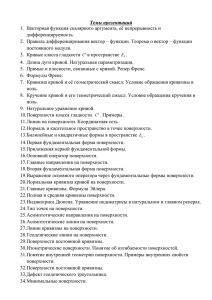
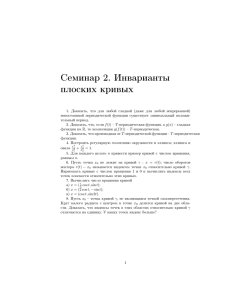
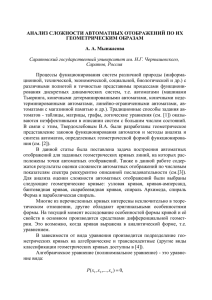
СРАВНИТЕЛЬНЫЕ СВОЙСТВА ПЕРЕХОДНЫХ КРИВЫХ Г.В. ВЕЛИЧКО, акад. ТАУ, СП «Кредо-Диалог», г. Минск, В.В. ФИЛИППОВ, д.т.н., ХНАДУ, г. Харьков Предваряя сравнительный анализ свойств кадиоиды, описанной в статье А.А. Белятынского и В.Н. Чешуйко [1], и анализ свойств других переходных кривых, приведем краткий обзор этих элементов дороги, очень важных для обеспечения удобства и безопасности движения. В настоящее время хорошо изучены свойства многих математических кривых, которые могут быть использованы в качестве переходных кривых: радиоидальная спираль, лемниската Бернулли, кубическая парабола, парабола четвертой степени, скоростная кривая, мажорантная кривая, минорантная кривая. Самый первый подробный, обстоятельный математический анализ переходных кривых для железнодорожных трасс выполнен Г.В. Ельфимовым [2], для автомобильных – М.С. Замахаевым [3]. Детальный современный обзор переходных кривых железнодорожного пути сделал В.В. Лагута [4], из исследования которого мы и приводим примеры. Анализ свойств переходных кривых показывает, что «классические» простейшие математические кривые не в полной мере соответствуют требованиям практики. Возрастающие требования безопасности и плавности железнодорожного и автодорожного движения инициировали развитие теории переходных кривых и методов их проектирования. Так, например, переходная кривая Г.М. Шахунянца избавлена от недостатка радиоидальной спирали по критерию углового ускорения. Синусоидальные переходные кривые предложены проф. Клейном (Германия) в 1937 г. Детально они исследованы для высокоскоростных железнодорожных линий Ф. Бирманом в 1968 г. В качестве переходной кривой второго пути используется переходная кривая Д.Г. Голованова. Аналитические выражения кривизны переходной кривой рациональной формы получены В.В. Лагутой [4]. Под рациональной формой понимается переходная кривая с ограниченной второй производной кривизны, для которой выполнены требования по угловому ускорению, непогашенному ускорению, его изменению и крутизне отвода возвышения наружного рельса. С.П. Русу и В.В. Кравец предложили алгоритм определения пространственных железнодорожных кривых с плавно изменяющейся кривизной. Примером строгой постановки задачи по определению формы переходной кривой, сопрягающей два участка траектории с кривизной k1 и k2, которые имеют в точке сопряжения общую касательную (k2 > k1), являются теоретические основы выбора рациональной формы переходной кривой, разработанные академиком В.А. Лазаряном. Уравнения предлагаемых для железнодорожных трасс таких переходных кривых как парабола четвертой степени, скоростная кривая, мажорантная кривая, минорантная кривая приведены в табл. 1, а графики их кривизны на рис. 1. Таблица 1 Уравнения некоторых переходных кривых Скоростная кривая k = cos β 2β C Парабола четвертой степени y= k =3 Мажорантная кривая x4 или 12C 9 23 tg β ⋅ cos 3 β C k=2 tg β C 2 Минорантная кривая k= 2 sin β C а б в г Рис. 1. Графики кривизны переходных кривых из табл. 1 (по В.В. Лагуте): а – скоростная кривая, С=33000 м2, L=223 м, б – парабола 4-й степени, С=6640000 м3, L=224 м, в – мажорантная кривая, С=10000 м2, L=222 м, г – минорантная кривая, С=20000 м2, L=262 м У скоростной кривой кривизна k обращается в нуль при значениях угла поворота β = 0 и β = π/2. Наилучшее сопряжение ее с дугой круга в том месте, где угловое ускорение равно нулю. Такой точкой является точка на кривой, в которой угол поворота кривой составляет β = 37 0 25' 59" . Мажорантная кривая похожа на радиоидальную спираль и у нее нет точек, в которых угловое ускорение равняется нулю. У минорантной кривой наилучшее сопряжение с дугой круга радиуса R = C / 2 в точке, где угол поворота кривой β = 45°, а круговая кривая должна иметь радиус R = C / 3 . У нее так же, как и у мажорантной кривой нет точек, в которых угловое ускорение равняется нулю. Согласно анализу В.В. Лагуты [4], перечисленные переходные кривые в начальной точке не удовлетворяют динамическим требованиям в отношении углового ускорения, за исключением параболы четвертой степени. В автомобильных дорогах кроме клотоиды используются «тормозные кривые» (Bremskurve), кривые семейства ПЕРС – переходные кривые, отвечающие условиям движения с переменной скоростью (Союздорпроект, Г.А. Федотов), кадиоида с плавным изменением центробежного ускорения (КАДИ, А.А. Белятынский и А.М. Таранов). В современных редакциях строительных норм и правил некоторых стран бывшего СССР, например, в ТКП 45-3.03-19-2006 «Автомобильные дороги, нормы проектирования» (Республика Беларусь), в п. 5.3.2 сказано, что наряду с прямыми «в качестве составляющих элементов плана и продольного профиля трассы дороги следует применять кривые как постоянной, так и переменной кривизны линейной или нелинейной функции». В САПР АД, в частности, в программных продуктах CREDO в качестве как самостоятельных элементов трассы, так и переходных кривых используются традиционные кривые и кубические гладкосопряженные сплайн-кривые. Следует отметить, что практическое применение новых видов переходных кривых, имеющих ряд замечательных свойств по сравнению с клотоидами, затруднено из-за нерешенных вопросов нормирования их параметров. Ведь это очевидно, что содержащееся в СНиП нормирование длин переходных кривых в зависимости от радиуса применимо только к клотоидам, да и то в случаях сопряжения прямых с круговыми кривыми. Нормирование лишь длины явно недостаточно не только для нормирования тех же клотоид, в случае их применения, например, как переходных кривых между двумя круговыми кривыми разных радиусов, но и других, так остро необходимых в практике проектирования переходных кривых с нелинейным характером изменения кривизны. В публикации Г.В. Величко, П.И. Поспелова, Е.М. Лобанова, В.В. Филиппова [5] по этой проблеме обоснован общий метод нормирования параметров любых типов переходных кривых, основанный на анализе темпа изменения их кривизны. Этот метод применим также и к клотоидам, так как не противоречит теоретическим основам их нормирования по параметру A = C . В этом нетрудно убедиться в C RL = , в результате l l величиной, обратно- результате несложных преобразований формулы текущего радиуса клотоиды r = которых видно, что постоянный параметр клотоиды С является ′ dk ⎛ l ⎞ 1 1 пропорциональной темпу изменения ее кривизны по длине, т.е. . =⎜ ⎟ = = dl ⎝ C ⎠ C RL Завершая краткий обзор истории развития теории переходных кривых и практики их применения, обращаем внимание на следующее. Практически все виды переходных кривых могут применяться при трассировании, но всегда с соблюдением нормативных требований безопасности и удобства движения. Именно последнее обстоятельство требует скрупулезного анализа применяемой кривой в каждом конкретном случае. При традиционном ручном проектировании такой анализ громоздок и редко применяется, поэтому остаются невыясненными характеристики режимов движения по криволинейным участкам дороги, что не способствует требуемому уровню качества проектных решений. При автоматизированном проектировании подобному анализу способствует визуализация изменения кривизны по всей трассе (рис. 2), графики изменения центробежного ускорения, поперечной силы и т.п. Процедуры для такого анализа в САПР не сложны и для случаев той или иной конфигурации Рис. 2. Сравнительные графики кривизны некоторых известных переходных кривых отгонов виража, для любых периодов эксплуатации дороги (весна, зима и т.д.). На основе анализа графиков кривизны перечисленных в нашем анализе переходных кривых можно прийти к выводу о том, что некоторые из них, например, кривая В.А. Лазаряна, парабола 4-й степени, кадиоида и некоторые кривые из семейства ПЕРС, предложенных Г.А. Федотовым [6], ориентированы на удовлетворение динамических требований в отношении углового ускорения в начальных и конечных точках переходной кривой. Это условие является достаточно важным для железных дорог, особенно для скоростных магистралей. Однако на сегодняшний день необходимость и критерии удовлетворения этих требований для автомобильных дорог никак практически или теоретически не обоснованы. При этом, естественно, реализация этих завышенных (по нашему мнению) для автомобильных дорог требований потребует увеличения либо длин, углов, сдвижек или тангенсов переходных кривых, что в большинстве случаев является критичным для реализации этих переходных кривых вообще, либо при попытке «вписаться» в ситуационные и рельефные ограничения приводит к ухудшению других, гораздо более важных характеристик переходных кривых, например, к увеличению скорости нарастания центробежного ускорения j. Эти выводы не всегда могут быть очевидными на первый взгляд, поэтому наряду с визуальным анализом графиков кривизны и реальных очертаний той или другой переходной кривой всегда следует применять более действенный теоретический и практический анализ форм и различных свойств той или другой переходной кривой. Учитывая то, что каждая из переходных кривых обладает теми или иными ценными качествами, именно такой анализ позволит количественно оценить и взвесить, от чего мы отказываемся и что приобретаем, выбирая ту или иную кривую. Для примера, выполним теоретический и практический анализ и сравнение свойств кадиоиды и клотоиды. Не вызывает сомнения тот факт, что клотоида, в силу линейного характера графика ее кривизны, является самой короткой переходной кривой, обеспечивающей непрерывность функции dk кривизны с минимально возможным для этой длины темпом изменения кривизны ( ), а dl соответственно, и с минимальной скоростью нарастания центробежной силы при постоянной скорости движения на ней. Все другие кривые, равные клотоиде по экстремальному для этих кривых значению темпа нарастания кривизны, будут либо длиннее клотоиды, либо будут иметь участки с большим, чем у клотоиды темпом изменения кривизны и, соответственно, с большей скоростью нарастания центробежной силы для той же постоянной скорости движения, что и по клотоиде. Для подтверждения этого вывода проанализируем графики изменения кривизны клотоиды и кадиоиды (рис. 3). Например, для кривых единичной длины (L = 1,0) и единичного радиуса (R = 1,0) получим следующие значения (табл. 2). Таблица 2 Радиусы и кривизна клотоиды и кадиоиды Радиус кривизны Кривизна Длина части переходной кривой кадиоида клотоида кадиоида клотоида 0 бесконечность бесконечность 0,0 0,0 0,125 23,273 8,000 0,043 0,125 0,250 6,400 4,000 0,156 0,250 0,375 3,160 2,667 0,316 0,375 0,500 2,000 2,000 0,500 0,500 0,625 1,463 1,600 0,684 0,625 0,750 1,185 1,330 0,844 0,750 0,875 1,045 1,140 0,957 0,875 1,0 1,0 1,0 1,0 1,0 Скорость нарастания центробежной силы при постоянной скорости движения пропорциональна скорости изменения кривизны k'. Как мы говорили ранее, для клотоиды скорость 1 1 RL3 изменения кривизны постоянна и равна k ′ = . Из зависимости (10) ρ = = 2 dβ s s (3L − 2 s ) RL ds приведенной в статье А.А. Белятынского и В.Н. Чешуйко [1] следует, что скорость изменения кривизны кадиоиды непостоянна и может быть вычислена как первая производная функции k=F(s) по формуле: k′ = 6s( L − s) . R3 (1) Найдем местоположение точки с максимальной скоростью изменения кривизны кадиоиды из уравнения k"= 0. В результате получим Sk"max = 0,5. Скорость изменения кривизны в этой точке 1,5 . равна k ′ = RL Из этого следует, что для обеспечения на кадиоиде той же комфортности движения по критерию темпа изменения кривизны (а, значит, и скорости нарастания центробежной силы), что и по клотоиде, потребуется устройство более длинной переходной кривой, а именно, в 1,5 раза длиннее, (рис. 3). При этом, конечно, возрастает в 1,5 раза и угол переходной кривой, так как L βL = , и сдвижка круговой кривой. А это, чаще всего, оказывается критичным и непреодолимым 2R препятствием при устройстве переходных кривых, особенно для закруглений с небольшим углом поворота и небольшим радиусом. К примеру, если угол α круговой кривой в клотоидном закруглении будет меньше, чем (0,5β1 + 0,5β2), то в таком закруглении не будет возможности устройства кадиоид без потери качеств удобства движения по сравнению с клотоидным закруглением. А если устройство такой переходной кривой окажется возможным, то, наверное, лучше устроить ее по клотоиде той же длины. При этом комфортность движения по скорости нарастания центробежной силы будет в 1,5 раза лучше, чем по кадиоиде. В А Рис. 3. Соотношение длин клотоиды и кадиоиды, эквивалентных по максимальной скорости нарастания центробежного ускорения Также следует обратить внимание на то, что длина участка кадиоиды со скоростью изменения кривизны, превышающей скорость изменения кривизны клотоиды той же длины, составляет 58%, т.е. больше половины переходной кривой. В этом легко убедиться, решив уравнение: k'кадиоиды – k'клотоиды = 0, (2) или 6s(L-s)/R3 – 1/RL = 0. (3) Представив s = kL и выполнив соответствующие преобразования, имеем уравнение: k2 – k + 1/6 = 0, (4) решив которое получим: k1 = 0,21, k2 = 0,79. Соответственно, длина участка кадиоиды со скоростью изменения кривизны большей, чем у клотоиды такой же длины L составит L(k2 – k1) = 0,58L. Практический анализ кадиоиды показывает, что она в основной своей части чрезвычайно близка к обычной клотоиде, а полная длина кадиоиды может быть в большинстве случаев заменена с достаточной для критериев разбивки, удобства и безопасности движения некоторой трассой, составленной из более простых сегментов: отрезок прямой, клотоида, дуга окружности. За основу исследования взят пример разбивки кадиоиды длиной L = 100 м для круговой кривой R = 400 м в монографии А.А. Белятынского и А.М. Таранова [7, стр. 35]. По координатам примера (X,Y1) построены точки кадиоиды (на рис. 4 точки черного цвета). Начало кадиоиды – в точке Н, там, где начинается размер 11,16 (слева). Последняя точка кадиоиды – там, где кончается размер 88,84. Полная длина составляет 100 м. Кадиоида заменена (от начала до конца) следующими гладко сопряженными элементами: 1) отрезок прямой длиной 11,16 м; 2) клотоида длиной 77,75 м; 3) круговая кривая длиной 11,09 м. Все построения по замене кадиоиды составной трассой выполнены в системе CREDO_MIX. Как это следует из табл. 3, составная кривая практически совпала с кадиоидой. Рис. 4. Кадиоида и составная кривая Таблица 3 Координаты кадиоиды (X,Y1) и составной кривой на участке клотоиды (X,Y2), (м) 32 40 48 56 64 72 80 88 96 X Y1 0,056 0,136 0,268 0,476 0,780 1,196 1,744 2,432 3,280 Y2 0,048 0,129 0,268 0,483 0,791 1,208 1,750 2,436 3,280 0,006 0,004 0,000 Расхождения по ординатам, (м) dY 0,008 0,007 0,000 0,007 0,011 0,012 Расхождения по ординатам dY не превышают 1,2 см расхождения в пределах точности разбивки. Для водителя смещения составной кривой от кадиоиды несущественно, так как: − во-первых, он выбирает свою траекторию движения не по какой-либо заданной кривой или, например, строго по середине полосы движения, а в пределах достаточно широкой полосы движения; − во-вторых, он всегда периодически смещается вправо-влево по полосе движения; − в-третьих, если даже он и ориентируется на какую-либо ведущую линию, например, линию разметки, то эту разметочную линию никогда специально не разбивают по координатам, а курс разметочной машины, чаще всего, устанавливает сам оператор машины, ориентируясь на метки дорожного мастера; − в-четвертых, если нанести разметочные линии строго по координатам, то, в силу известной толщины разметочной линии 10–15 см, клотоида, как часть составной кривой, и кадиоида будут в пределах этой толщины, т.е. для водителя неразличимы. Таким образом, клотоида (X,Y2) и кадиоида (X,Y1) практически совпадают как геометрически, так и при восприятии их водителем. Если проследить динамику движения по клотоиде и кадиоиде, то ее характеристики также будут совпадать. Кадиоида в ее начале на участке длиной 11,16 м практически совпадает с прямой линией (разница в координатах Y1 и Y2 от начала кадиоиды до точки с X = 32 м – не более 5 мм). Обращается внимание именно на это обстоятельство. У данной кадиоиды, как можно судить по ее координатам, первая треть этой переходной кривой очень близка к прямой линии. Поэтому замена начального участка кадиоиды прямым отрезком для самой кадиоиды практически незаметна, несущественна. После начального неразличимого участка точки клотоиды практически совпали с кадиоидой, а это значит, что практически совпали и радиусы. Участок круговой кривой длиной 11,09 м тоже совпадает с кадиоидой. Значит, закономерность изменения центробежных ускорений и сил практически одинакова для обеих трасс. Результаты этого исследования подтверждаются и сопоставительным практическим анализом реальных очертаний различных вариантов кадиоиды и клотоид, построенных в системе CREDO ДОРОГИ комплекса программных продуктов CREDO III (рис. 5). Kкад Kкад C C C K2 K C K1 L б а Рис. 5. Сопоставление кадиоиды Kкад и вариантов клотоиды K, K1, и K2 На рис. 5а прямая L и окружность C, касательные к концам кадиоиды Kкад, повторно сопряжены клотоидой K. Величина сдвижки одинакова для обеих кривых и составляет p = 13,93 м. Остальные параметры сравниваемых кривых приведены в табл. 4 и 5. Таблица 4 Параметры кадиоиды и клотоиды при одинаковой сдвижке (рис. 5а) Параметры Кадиоида Клотоида Длина L, м 240 185,65 Радиус в конце кривой R, м 100 100 Угол β 68º45´18´´ 53º11´08´´ Параметр Amin, м 126,5 136,0 Начало клотоиды находится на расстоянии 27,13 м от начала кадиоиды. Параметр Amin вычислен по известной формуле A = rl : для клотоиды при r = R, l = L, для кадиоиды – при тех значениях r и l , при которых величина A минимальна, т. е. в середине кадиоиды. Как можно судить по параметру Amin, клотоида более комфортна, чем идентичная ей по сдвижке кадиоида. Обе переходные кривые практически совпадают. Отклонения осей – в пределах погрешностей, допустимых при строительстве. При увеличении параметра А отклонения уменьшаются. На рис. 5б и в табл. 5 сопоставлены та же кадиоида Kкад, что и на рис. 5а, и две клотоиды K1 и K2. Таблица 5 Параметры кадиоиды и клотоид при разных сдвижках (рис. 5б) Параметры Кадиоида Kкад Клотоида K1 Клотоида K2 Длина L, м 240 160 240 Радиус в конце кривой R, м 100 100 100 Угол β 68º45´18´´ 45º50´12´´ 68º45´18´´ Параметр Amin, м 126,5 126,5 155,0 Сдвижка p, м 13,93 10,43 22,80 Первая клотоида K1 идентична кадиоиде Kкад по минимальному значению параметра Amin, но имеет меньшую длину и сдвижку. Вторая клотоида K2 идентична кадиоиде Kкад по длине, радиусу в конце и углу поворота, но гораздо лучше по уровню удобства движения (параметру Amin), и это повышенное удобство движения требует большей сдвижки p. О сопоставлении остальных параметров, таких как тангенсы, сдвижки, углы и биссектрисы можно говорить только на основе анализа их уравнений и при наличии каким-либо образом обоснованных критериев такого сопоставления. В виду их отсутствия сложно судить о том, лучше или хуже та или иная кривая только, например, по величине сдвижки круговой кривой или по длине длинного или короткого тангенса. В этой связи утверждения А.А. Белятынского и В.Н. Чешуйко [1] о том, что по этим параметрам кадиоида всегда лучше клотоиды или любой другой переходной кривой, нами не проверялись и никак не оценивались. По-видимому, критичность значений этих параметров для той или другой кривой необходимо оценивать в конкретных ситуационных и рельефных ограничениях в процессе реального проектирования. Немаловажную роль в анализе и сопоставлении свойств различных переходных кривых, в том числе и кадиоид, играет достаточность методического и математического обеспечения для их практического использования. Так, например, для включения таких кривых в состав элементной геометрической базы САПР АД одних только формул для расчета прямоугольных координат или таблиц разбивки отдельных точек этих кривых явно недостаточно. Для реализации интерактивных построений с ними необходимо разработать точные и приближенные решения основных расчетных задач для различных схем сопряжений и пересечений кадиоид самих с собой, а также со всеми другими элементами трассы дороги (прямыми, окружностями, клотоидами, сплайнами, параболами и т.д.). Пример одной из важнейших задач такого рода – поиск проекции точки на новую кривую или решение обратной задачи – поиск параметров новой переходной кривой по направлению и координатам ее начала и координатам ее конца. Ведь в САПР АД очень важно интерактивно формировать трассу, управлять конфигурацией переходных кривых, добиваясь требуемых характеристик режимов движения как с постоянной, так и с переменной скоростью. Так, например, именно для этих целей в программных продуктах CREDO используются различные переходные кривые и, в первую очередь, интерактивно определяемые клотоиды и гладко-сопряженные сплайнкривые. В CREDO имеется возможность, интерактивно управляя клотоидой или сплайн-кривой, добиться такой ее конфигурации, которая близка по форме к любой известной кривой. К тому же, сплайн-кривые позволяют добиваться той конфигурации траекторий и форм графика кривизны, которые необходимы в тех или иных конкретных условиях рельефа местности и соответствуют требуемым характеристикам безопасного и удобного движения. Завершая анализ, следует отметить, что кадиоида имеет ряд ценных свойств, отмеченных в работе А.А. Белятынского и В.Н. Чешуйко [1]. Дальнейшие исследования могут показать, что во многих случаях кадиоида может быть очень хорошей переходной кривой для трасс, которые гораздо жестче, чем ось полосы движения автомобилей, связаны с экипажем, для трасс, где критично обеспечение непрерывности нарастания центробежного ускорения в стыковых точках. Например, для железнодорожного транспорта, где траектория движения железнодорожного экипажа полностью определяется трассой и смещения экипажа относительно трассы катастрофичны. Поэтому, возможно именно в железнодорожном транспорте кадиоиды смогут составить достойную конкуренцию клотоидам и другим переходным кривым. В заключение следует еще раз отметить, что анализ и сравнение свойств переходных кривых должны быть основаны на оценке объективных, теоретически и практически обоснованных критериев соответствия той или другой переходной кривой ее функциональному назначению. При этом, как показано в нашем анализе, если в качестве такого критерия принята обеспечиваемая на кривой скорость нарастания центробежного ускорения j или постоянство угловой скорости поворота передних колес автомобиля ω при постоянной скорости движения, то вряд ли какая-то другая кривая окажется более предпочтительной, чем клотоида. Однако на практике достаточно часты случаи, когда декларируемое постоянство скорости движения V не обеспечивается. Например, либо в реально сложившихся условиях движения перед кривыми с малыми и близкими к предельно допустимым радиусами, на участках с ограниченной видимостью или на участках с существенными продольными уклонами и т.д., либо на участках, где проектируется замедленный или ускоренный режим движения. Например, на подходах к участкам со скоростью меньшей, чем расчетная скорость движения на основной дороге, или на переходных кривых поворотных рамп транспортных развязок. В этих условиях клотоиды резко теряют свои преимущества, а для выбора альтернативы необходимо исходить, прежде всего, из соответствия графика кривизны альтернативных кривых наиболее вероятным или проектируемым режимам движения. К сожалению, несмотря на обилие различных кривых, ни одна из них не имеет строгого математического обоснования соответствия ее формы и характера изменения кривизны наперед заданным условиям движения, описываемым в терминах скорости, ускорений или замедлений, скорости нарастания центробежного ускорения, коэффициента поперечной силы и уклона проезжей части. Направлениям разрешения этих проблем будет посвящена следующая наша публикация. Литература 1. Белятынский А.А., Чешуйко В.Н. Проектирование переходных кривых при реконструкции автомобильных дорог. «Автоматизированные технологии изысканий и проектирования», 2007, № 2(25), с. 34–36. 2. Ельфимов Г.В. Теория переходных кривых. М., Трансжелдориздат, 1948. 3. Замахаев М.С. Переходные кривые на автомобильных дорогах. М., Транспорт, 1965. 4. Лагута В.В. Совершенствование проектирования кривых железнодорожного пути в плане./ Реферат диссертации на соискан. степени канд. техн. наук. Днепропетровск, ДИИТ, 2002. 5. Величко Г.В., Поспелов П.И., Лобанов Е.М., Филиппов В.В. О нормировании параметров переходных кривых. «Дороги России XXI века», 2002, № 6, с. 80–86. 6. Федотов Г.А. Автоматизированное проектирование автомобильных дорог. М., Транспорт, 1986. 7. Белятынский А.А., Таранов А.М. Проектирование кривых при строительстве и реконструкции автомобильных дорог. Киев, «Выща школа», 1988.