УТОЧНЕННАЯ МОДЕЛЬ РАСЧЕТА ТЯГОВОЙ
реклама

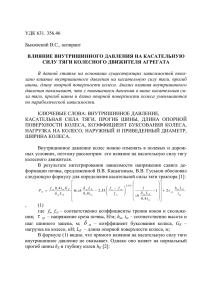
УДК 621.878 УТОЧНЕННАЯ МОДЕЛЬ РАСЧЕТА ТЯГОВОЙ ХАРАКТЕРИСТИКИ ЗЕМЛЕРОЙНО-ТРАНСПОРТНЫХ МАШИН С УЧЕТОМ ИЗМЕНЕНИЯ СОПРОТИВЛЕНИЯ КАЧЕНИЯ П.А. Сокол Рабочий процесс землеройно-транспортных машин (ЗТМ) включает два режима: тяговый и транспортный. На тяговом режиме они работают при копании грунта, его перемещении и разравнивании, ремонте грунтовых дорог. Его отличительная особенность – наличие высоких и изменяющихся сопротивлений, для преодоления которых необходима большая сила тяги; тяжелые грунтовые и дорожные условия, постоянно меняющиеся значения нормальных реакций грунта на колеса. Уточненная модель расчета тяговой характеристики землеройно-транспортных машин с учетом изменения сопротивления качения изложена в данной статье Ключевые слова: сопротивление, тяга, колесо, момент, поверхность Теоретическое исследование взаимодействия пневматической шины с опорной поверхностью представляет собой сложную научную проблему, которая связана с разработкой модели взаимодействия и с описанием процессов при взаимодействии колеса с опорной поверхностью (ОП). Эти два процесса тесно взаимосвязаны и взаимодействуют между собой. При этом построение моделей базируется на исследовании экспериментальных материалов и процессов, а теоретические исследования во многих случаях не описывают. В теории качения колеса большое значение отводится процессам его взаимодействия с опорной поверхностью, и принципиально рассматриваются два частично обособленных подхода: процесс качения, характерный в основном для транспортного режима при движении, и процесс тягового режима, в основном характерный для землеройнотранспортных машин (ЗТМ). Оба процесса частично перекрываются, поскольку эти режимы могут меняться в процессе движения машины. В ходовой части современных ЗТМ колеса выполняют несколько функций: движителя, поддерживающих и направляющих элементов, а также играют роль упругой подвески. Процесс взаимодействия пневматической шины с опорной поверхностью сопровождается сложными физическими явлениями, что обуславливает принятие ряда допущений при исследовании процесса качения колеса. Например, при расчете тяговых характеристик ЗТМ изменения сопротивления качения колесного движителя от величины развиваемой силы тяги или крутящего момента в основном не учитываются [2,3]. Использование эмпирических зависимостей, полученных предварительно для конкретных пневматических шин при расчетах тяговой характеристики с учетом меняющейся величины сопротивления качению позволяет получить недостаточно точные результаты [3]. А в большинстве теоретических зависимостей используются различные коэффициенты, получен1 Сокол Павел Александрович – ВАИУ, ст. преподаватель, тел. 8-910-345- 07-92 92 ные экспериментально, значения которых в реальных условиях могут меняться, что приводит к снижению точности в расчетах, и как следствие, они имеют область ограниченного применения или требуют постоянного уточнения условий их действия. Применяя общефизические принципы при рассмотрении силового взаимодействия ведущего колеса с опорной поверхностью, можно упростить расчеты тяговой характеристики, используя силовые соотношения колесного движителя. При работе колесного движителя в режиме ведущего колеса крутящий момент расходуется как на преодоление сопротивления качению, так и на создание силы тяги. При работе в режиме ведущего колеса на ось колесного движителя действует вертикальная нагрузка Gк, а при наличии движения возникает еще и горизонтальная реакция от рамы машины Fк. (рисунок). Силовое взаимодействие ведущего колеса с опорной поверхностью В результате взаимодействия колесного движителя с грунтом на участке контакта шины с опорной поверхностью возникают элементарные реактивные силы, которые в сумме дают общую равнодействующую реактивных сил N. Разложив эту равнодействующую по двум направлениям вертикальному и горизонтальному, получим составляющие R и Т, которые будут уравновешиваться соответственно силами Gк и Fк, приложенными к оси колесного движителя. На основании этого можно составить уравнение равновесия колесного движителя: ∑Мо= 0, и тогда уравнение силового равновесия колесного движителя будет иметь следующий вид [1]: (1) M k Trc Ra Trc fT Gk rc , где M k - подводимый крутящий момент; Т – сила тяги; R – сила нормальной реакции дорожного покрытия на шину; Gk - сила вертикальной нагрузки на ось колеса; a – коэффициент трения качения колеса; rc - силовой радиус колесного движителя; fT - приведенный коэффициент сопротивления качению колеса. Если установить связь между M k и Т, то из тяговых расчетов можно исключить силу сопротивления качению и условную окружную силу, однако, это сделать трудно, т.к. очень сложно определить величину крутящего момента, подводимого к колесному движителю. Но, это возможно, если применить дополнительные зависимости, характеризующие работу колесного движителя. Экспериментальным путем было установлено, что зависимость M k = M k (Т) при качении по грунтовым поверхностям является нелинейной, а для асфальтобетона она близка к линейной [1]. Немаловажное значение имеет определение величины коэффициента сопротивления качению fT , который можно найти, используя уравнения мощностного баланса колесного движителя. При прямолинейном качении колесного движителя по горизонтальной поверхности уравнение баланса мощности имеет следующий вид [1]: N k NT N f N , (2) где N k - мощность, подводимая к колесному движителю; N T - тяговая мощность; N f - мощность, необходимая для преодоления сопротивления качению; N - мощность, затрачиваемая на буксование колесного движителя. Мощность N f учитывает только силовые потери при работе колесного движителя, как суммарная величина силовых потерь за счет деформаций шины и деформации грунта, и определяется по формуле: N f N fc N f , (3) где N fc - мощность сопротивления качению колесного движителя в свободном режиме; Nf - мощность дополнительного сопротивления качению при деформации шины под действием силы тяги Т и тангенциальной деформации как грунта, так и шины. Мощность сопротивления качению при движении по грунту определяется по формуле: N fc f cGk rkc k , (4) f где c - коэффициент сопротивления качению колесного движителя, работающего на свободном режиме, определяется по справочным данным [2]; rkc - радиус качения колеса на свободном режиме; - угловая скорость колеса. Работа, затраченная на тангенциальную деформацию шины, принимается полностью потерянной, поэтому формулу, определяющую мощность дополнительного сопротивления качению можно записать так: N f T k rkc rkп , (5) k где rкп - радиус качения колеса на прямолинейном участке ( rкп rkc шТ , где ш - коэффициент тангенциальной эластичности шины при качении по недеформируемой поверхности) [4]. Зависимости радиуса качения от силы тяги одинаковы для недеформируемых и деформируемых поверхностей, и для определения значений коэффициента это понятие можно применить и в случае качения колеса по деформируемой поверхности: (6) ш r, где r - коэффициент тангенциальной деформации грунта. В результате в общем случае имеем: (7) rkn rkc T . Применяя линейную зависимость радиуса качения от силы тяги на весь диапазон изменения силы тяги колесного движителя, получаем: Nf T k (rkc rkc T) T 2k , (8) и тогда мощность, необходимая для преодоления сопротивления качения можно вычислить по формуле: Nf f cGk rkc T 2k . k (9) Выражение для определения коэффициента сопротивления качению на ведущем режиме работы можно получить, разделив левую и правую части полученного выше уравнения на k rkc Gk : Nf f r Gk fc k kc T2 rkc Gk . (10) k Величину можно определить двумя способами, описанными ниже. При известной зависимости rkn rkn (T ) , заданных чаем: Gk и Pw (давление воздуха в шине), полуrkni rknj Ti Tj rkn , T (11) 93 где rkni и rknj - значения радиусов качения ко- rkc леса на прямолинейных участках, при соответствующих им силах тяги Ti и T j . o Ti Если При неизвестных зависимостях rkn rkn (T ) , но известных зависимостях кривых буксования (T ) , или кривых скольжения o o (T ) , величину можно получить следующим образом: из определения коэффициента буксования следует, что: rkc rki , rkc rkc rkni rkc rkc rkni , получим: rkc Ti rkc . Ti (14) В результате получаем формулу: r . Ti i kc Известно, r ro где что i r rkc , что ro , то f T fc T , то окончаrc Gk Trc f c Gk rc T2. Литература (15) 1 допущения, (17) Из этого уравнения можно определить величину подводимого к колесному движителю крутящего момента, задаваясь значением силы тяги, а также используя зависимость M k M k (T ) можно построить тяговую характеристику землеройнотранспортной машины графо-аналитическим способом. В результате проведенных преобразований появилась возможность отказаться от сложных и трудоемких испытаний шин и выразить тяговые качества шины с использованием одного экспериментального коэффициента, легко получаемого в условиях заводских испытаний. (13) rkni rc Mk Разделив левую и правую части последнего уравнения на величину силы тяги Ti , соответствующую (16) тельная формула крутящего момента, подводимого к колесному движителю, но не учитывающая возрастающую глубину колеи, будет иметь вид: (12) . принять . 2 а при движении по прямолинейному участку i ro 1. Бромберг А.А. Машины для земляных работ. Теория и расчет. М.: Машиностроение, 1964, - 342 с. 2. Ульянов Н.А. Колесные движители строительных и дорожных машин. Теория и расчет. – М.: Машиностроение, 1982, - 279 с. 3. Ульянов Н.А. Теория самоходных колесных землеройно-строительных машин. – М.: Машиностроение, 1969, - 520 с. 4. Ульянов Н.А., Ронинсон Э.Г., Соловьев В.Г. Самоходные колесные землеройно-транспортные машины. М.: Машиностроение, 1976, - 359 с. при o , [3], ro - радиус недеформированной пневмати- ческой шины; - нормальная деформация пневматической шины. В итоге получаем формулу: Военный авиационный инженерный университет, г. Воронеж THE SPECIFIED CALCULATION MODEL OF DIGGING AND TRANSPORT VEHICLES TRACTION CHARACTERISTIC IN VIEW OF ROLLING RESISTANCE CHANGE P.A. Sokol The working process of digging-transport cars (ZTM) includes two modes: traction and transport. They work at a traction mode when digging soil, its moving and leveling, repair of dirt roads. Its distinctive feature – existence of high and changing resistance for which overcoming big force of draft is necessary; the heavy soil and road conditions, constantly changing values of normal reactions of soil on wheels. The specified model of calculation of the traction characteristic of digging- transport cars taking into account change of resistance of rolling motion is stated in this article Key words: resistance, traction, wheel, moment, surface 94