3 уравнение касательной прямой и нормальной плоскости
реклама

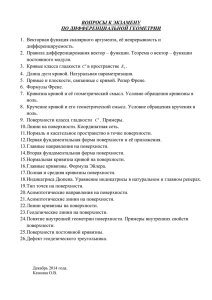
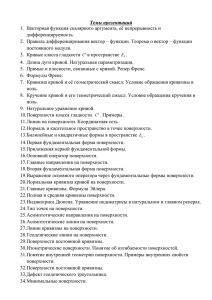
133 §3 УРАВНЕНИЕ КАСАТЕЛЬНОЙ ПРЯМОЙ И НОРМАЛЬНОЙ ПЛОСКОСТИ К ПРОСТРАНСТВЕННОЙ КРИВОЙ Из аналитической геометрии известно, что всякому уравнению с тремя неизвестными F ( x , y , z ) = 0 ( или в явной форме z = f ( x , y ) ) соответствует в декартовой системе координат некоторая поверхность. Один из способов задания кривой в пространстве, задание как линии пересечения двух поверхностей : F1 ( x , y , z ) = 0 ⎫⎪ ⎬. F2 ( x , y , z ) = 0⎪⎭ Другой способ задания - параметрическое задание x = x( t ) , y = y( t ) , z = z( t) , t ∈ T (1) Найдем канонические уравнения касательной прямой к пространственной кривой заданной параметрически уравнениями (1) в некоторой точке M 0 ( x 0 , y 0 , z 0 ) , соответствующей значению параметра t 0 ∈ T . Искомые уравнения имеют вид x − x0 y − y0 z − z0 = = , m n p r r r r r Кривая L ∈ R 3 есть годограф вектор- функции r ( t ) = x( t ) i + y( t ) j + z( t ) k , а вектор где m, n, p -проекции (координаты) направляющего вектора прямой s = ( m, n, p) . r r ′( t ) направлен по касательной к кривой L , следовательно его можно считать на- правляющим вектором прямой, значит m = x ′( t 0 ) , n = y ′( t 0 ) , p = z ′( t 0 ) . Тогда искомые уравнения примут вид x − x0 x ′( t 0 ) = y − y0 y ′( t 0 ) = z − z0 (2) z ′( t 0 ) z M0 О х y 134 Определение Нормальной плоскостью к пространственной кривой называется плоскость, перпендикулярная касательной прямой и проходящая через точку касания. Пусть M 0 ( x 0 , y 0 , z 0 ) - точка касания. Уравнение плоскости, проходящей через эту точку имеет вид A( x − x 0 ) + B( y − y 0 ) + C( z − z 0 ) = 0 , r где n( A, B, C ) - нормальный вектор плоскости. Из определения нормальной плоскости r r следует, что векторы n( A, B, C ) и r ′( t ) коллинеарные, поэтому можно считать, что A = x ′( t 0 ), B = y ′( t 0 ), C = z ′( t 0 ) . Тогда искомое уравнение примет вид x ′(t 0 )( x − x 0 ) + y ′(t 0 )( y − y 0 ) + z ′(t 0 )( z − z 0 ) = 0 (3) Пример Найти уравнение касательной прямой и нормальной плоскости к годографу L, заданному параметрическими уравнениями ⎧x = a cos t , ⎪ ⎨ y = a sin t , t ∈ R, a = const , b = const , ⎪z = bt ⎩ в точке M 0 , соответствующей значению параметра t 0 = π 3 . z M0 О y t N a х Данная кривая называется винтовой линией. При произвольном t x 2 + y 2 = (a cos t ) + (a sin t ) = a 2 2 2 Найдем координаты точки касания: π a x0 = a cos 3 = 2 , y0 = a sin π 3 =a π 3 , z0 = b 3 2 r Определим координаты направляющего вектора касательной r ′(t 0 ) x′(t 0 ) = − a sin π 3 = −a 3 ; 2 135 y ′(t 0 ) = a cos π 1 =a ; 3 2 z ′(t 0 ) = b . Тогда уравнения касательной π 3 a z −b y− 3. 2 = 2 = a b 3 −a 2 2 x− Уравнение нормальной плоскости a 3⎛ 3⎞ ⎛ a⎞ a⎛ π ⎟ − b⎜ z − b ⎞⎟ = 0 . ⎜ x − ⎟ − ⎜⎜ y − 2 ⎝ 2⎠ 2⎝ 2 ⎟⎠ ⎝ 3⎠ § 4 КРИВИЗНА КРИВОЙ Дифференциал длины дуги. Пусть кривая L - график непрерывно дифференцируемой функции y = f ( x ) . Такую кривую называют гладкой. Возьмем точка А за начало отсчета. Пусть M ∈ L , тогда длина дуги АМ будет функцией абсциссы х точки М. y M1 M A О x x ( Обозначим эту функцию l ( x ): AM = l ( x ) . Найдем дифференциал функции l ( x ) , который будем называть дифференциал длины дуги. Найдем l ′( x ) . По определению l ′( x ) = dl l ( x + Δx ) − l ( x ) = lim Δx dx Δx→0 (4) Без доказательства примем теорему: Теорема 1 Предел отношения длины дуги гладкой кривой к длине стягивающей ее хорды при стремлении длины дуги к нулю равен единице: lim Δx →0 ( MM1 MM1 =1 На основании теоремы 1 и свойств эквивалентных бесконечно малых величин, ( заменим дугу MM1 эквивалентной ей хордой MM1 = Δx 2 + Δy 2 . Тогда 136 2 dl Δx 2 + Δy 2 ⎛ Δy ⎞ = lim = lim 1 + ⎜ ⎟ = 1 + y ′ 2 l ′( x ) = 2 Δx → 0 ⎝ Δx ⎠ dx Δx→0 Δx Отсюда dl = 1 + y ′ 2 dx . (5) Внеся dx под знак радикала получим dl = dx 2 + dy 2 (6) L y M1 T M A О x x+dx x Из формулы (6) следует, что с геометрической точки зрения дифференциал дуги кривой в точке М с абсциссой х равен длине соответствующего отрезка касательной к линии L в точке M(x,y)/ Это отрезок МТ. Если кривая L задана параметрически, уравнениями x = x( t ) , y = y( t ), то с использованием принятых в механике обозначений получим, x t′ = x& , y t′ = z&, y x′ = Подставив эти значения в уравнение (5) получим, y& x& dl = x& 2 + y& 2 dt Кривизна кривой. Основные определения. Одной из важных характеристик кривой является мера ее изогнутости. Для введения такой меры необходимо ввести количественную характеристику. D B C A 137 M1 M Рассмотрим на кривой точки М и M1 Проведем в этих точках касательные к кривой. При переходе от точки М к M1 касательная поворачивается на угол Δϕ , который называется углом смежности . Отношение угла смежности дуги к ее длине называется средней кривизной дуги Δϕ K cp = . Δl Средняя кривизна характеризует среднюю изогнутость кривой на всей дуге. Для характеристики меры изогнутости кривой в точке введем новое понятие Определение 7 Кривизной К линии L в точке М называется предел, к которому стремится средняя кривизна K cp дуги MM1 линии L при стремлении точки M1 к точке М: Δϕ K = lim K cp = lim M1 → M Δl → 0 Δl Вычисление кривизны кривой. Пусть кривая L является годографом дважды дифференцируемой векторной r функции действительного аргумента r ( t ) . О 138 Δϕ . Угол смежности Δϕ - угол между Δt →0 Δl r r r r r& ( t + Δt ) . Вектор r& ( t + Δt ) = r& ( t ) + Δr& ( t ) . Из векторного произведения векторов r r r& ( t ) + Δr& ( t ) находим: r r r r r r& , r& + Δr& r& , Δr& sin Δϕ = r r r ⇒ sin Δϕ = r& r& r , r& r& + Δr& r r + Δr& r r r так как r& , r& = 0 . Кривизна кривой K = lim [ ( )] [ r r& ( t ) и r r& ( t ) и ] [ ] При Δt → 0 Δl → 0 и Δϕ → 0 , а также Δϕ ~ sin Δϕ . Следовательно кривизна [ ] r r r& , Δr& sin Δϕ Δϕ K = lim = lim = lim r r = & r& ( t + Δt ) Δl Δt → 0 Δl Δt → 0 Δt → 0 r Δl r ⎡ r& Δr& ⎤ ⎢r , ⎥ ⎣ Δt ⎦ = lim . Δt → 0 r r l Δ r& r& ( t + Δt ) Δt r& r& Если Δt → 0 , то r ( t + Δt ) → r ( t ) и Δl ≈ Δr ; тогда r r r& , && r K = r3 (7) r& [ ] Формула (7) используется, для вычисления кривизны плоской или пространственной кривой L, если она является годографом дважды дифференцируемой вектор r функции r ( t ) . r r r r Пример Вычислить кривизну кривой r ( t ) = e t i + e − t j + t 2k в произвольной точке t и при t=0. r r r r r r r r& (t ) = e t i − e −t j + 2k , &r&(t ) = e t i + e − t j r i r r r& (t ), &r&(t ) = e t [ ] et [rr& (t ), &rr&(t )] = K= r k r r r 2 = − 2e − t i + 2e t j + 2 k r j − e −t e −t 0 ( ) ( 2 ) 2e − 2t + 2e 2t + 4 = 2 e −t + e t = 2 e −t + e t . r r& (t ) = e 2t + e −2t + 2 = e − t + e t . ( 2 e −t + e t (e −t +e ) t 3 )= ( (e 2 −t +e ) = 2 ) (x + y ) t 2 2 . Замечание Часто при задании векторной функции скалярного аргумента исr пользуют натуральный параметр (длину дуги). При таком задании кривой r& ( l ) = 1 и r r вектор &&r ( l ) перпендикулярен вектору r& ( l ) . Тогда формула (7) примет вид r K = && r ( l) . 139 Вычисление кривизны плоской кривой, заданной параметрически. Пусть гладкая плоская кривая L задана параметрически уравнениями x = x( t ) ⎫ ⎬ y = y( t ) ⎭ r r r Запишем вектор - функцию r ( t ) = x ( t ) i + y ( t ) j и воспользуемся формулой (7) r r r r r r для определения кривизны этой кривой. Найдем r& ( t ) = x&( t ) i + y& ( t ) j , &&r ( t ) = x&&( t ) i + &&y( t ) j . Тогда r j r i [ rr& ( t), &&rr( t)] = x&( t) r k r 0 = ( x& ( t ) && y ( t ) − x&&( t ) y& ( t )) k . y& ( t ) x&&( t ) && y( t ) 0 [rr& (t ), &&rr(t )] = x&(t ) &&y(t ) − &&x(t ) y& (t ) , r 2 2 r& (t ) = x& (t ) + y& (t ) Получаем формулу для определения кривизны кривой, заданной параметрически r r r& , r&&] [ = K= r r& 3 ( x& &&& − xy &&& xy 2 + y& 2 ) 3 (8) 2 Вычисление кривизны плоской кривой в декартовых координатах. Если кривая L задана уравнением y = f ( x ) , то формулу для вычисления кривизны можно получить из формулы (8)Ю если явное задание считать параметрическим: Тогда из формулы (8) имеем K = ⎧ y = f (t ) ⎨ ⎩x = t && y (1 + ( y& ) ) 2 3 2 или переходя к уравнению линии в де- картовой системе координат , K= d2y dx 2 ⎛ ⎛ dy ⎞ 2 ⎞ ⎜1 + ⎜ ⎟ ⎟ ⎝ ⎝ dx ⎠ ⎠ 3 2 2 . 4 Пример Найти кривизну в любой точке циклоиды x = a( t − sin t ), y = a(1 − cos t ) 1 Ответ: K = . t 4a sin 2 Пример Вычислить кривизну кривой y = ln x в точке х=1. Ответ: K = Радиус, круг и центр кривизны. Проведем к кривой L нормаль в точке М(х;y) и отложим на этой нормали в сторону вогнутости кривой отрезок MN = R , по величине обратный кривизне K : R = 1 R . Отре- 140 зок MN называется радиусом кривизны, точка N -центром кривизны, а круг с центром в точке N и радиусом R - кругом кривизны кривой в точке М(х;y). y N M х О Если кривая L задана в декартовой системе координат уравнением y = f ( x ) , то ее радиус кривизны находится по формуле (1 + y ′ ) 2 R= 3 2 y ′′ Если кривая L задана параметрически, то ее радиус кривизны определяется по формуле ( x& + y& 2 ) 2 R= &&& &&& yx − yx r r Если L - годограф вектор функции r = r ( t ) r3 r& R= r r r& , && r 2 [ ] 3