адаптивный цифровой алгоритм анализа фазы для приема и
реклама

Серия РАДИОФИЗИКА. Вып. 2
105
УДК 621.37
АДАПТИВНЫЙ ЦИФРОВОЙ АЛГОРИТМ АНАЛИЗА
ФАЗЫ ДЛЯ ПРИЕМА И ДЕКОДИРОВАНИЯ СИГНАЛОВ
С ФАЗОВОЙ И ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ
М.М. Сорохтин, О.А. Морозов, А.А. Логинов
Рассматривается адаптивный алгоритм анализа фазы сигнала, предназначенный для детектирования сигналов с фазовой и частотной манипуляцией на фоне коррелированного шума. В основе методики обработки лежит
адаптивный фильтр автоподстройки фазы. Разработанный алгоритм допускает эффективную реализацию на базе цифровой логической схемы или сигнального процессора для работы в режиме реального времени.
В основе современных систем передачи цифровой информации по радиоканалам лежит кодирование каждого символа с помощью сегмента опорного колебания с определенными значениями базовых параметров — амплитуды, частоты,
начальной фазы. В соответствии с изменяемым параметром различаются основные семейства — амплитудная манипуляция (АМ, ASK — Amplitude Shift Keying),
частотная манипуляция (ЧМ, FSK — Frequency Shift Keying) и фазовая манипуляция (ФМ, PSK — Phase Shift Keying). Кроме базовых видов манипуляции также
широко применяются комбинационные — например, квадратурная амплитудная
(КАМ, QASK — Quadrature Amplitude Shift Keying).
Основная проблема, которая возникает при декодировании сигналов, заключается в построении решающего устройства, ставящего в соответствие сегменту колебания значение информационного символа, устойчивого к шумовым факторам и
искажению частотной характеристики канала передачи.
При фазовой манипуляции символ передаваемой информации, состоящий в
общем случае из нескольких бит, определяет значение сдвига фазы для сегмента
сигнала по отношению к немодулированной опорной частоте [1]. Этот интервал
времени будем называть битовым сегментом. Математически фазоманипулированный сигнал можно представить в следующем виде:
xPSK (t ) =
2E
2πi
cos ω0t +
; i = 0,1,…M–1;
T
M
(1)
T — время передачи символа, E — энергия сигнала, излучаемая за время T,
M — количество разрешенных состояний фазы. При передаче двоичной инфорN
мации величину M выбирают равной 2 , где N — количество бит, передаваемых
где
за один битовый сегмент. Наиболее широко применяются два частных случая:
• N = 1, M = 2 — ФМ2 или BPSK (binary phase shift keying). Сдвиг фаз принимает одно из двух значений (0, π).
Вестник ННГУ им. Н.И. Лобачевского
106
• N = 2, M = 4 — ФМ4 или QPSK (quadrature phase shift keying). Сдвиг фаз
принимает одно из четырех значений (0, π/2, π, 3π/2).
Похожее выражение описывает сигнал с частотной манипуляцией:
x FSK (t ) =
Здесь частота
ωi
2E
cos(ω i t + φ ) ; i=0,1,…M–1.
T
может принимать M дискретных значений, а фаза
(2)
φ
— про-
извольная константа.
Традиционные схемы реализации ФМ- и ЧМ-демодуляторов обычно связаны с
достаточно сложной аппаратной базой, так как многочисленные замкнутые петлевые схемы автоподстройки требуют весьма сложной настройки [2]. В то же время
современные схемотехнические решения позволяют реализовать приемное оборудование на базе компактной и надежной встроенной цифровой вычислительной
системы (например, на основе программируемой логической интегральной схемы
(ПЛИС) или цифрового процессора обработки сигналов (ЦПОС)), а также допускают программно-аппаратную реализацию современных алгоритмов обработки
сигналов.
ФНЧ
x(t )
2
cos ω0t
T
I (t )
Q(t )
arctg
I (t )
2
sin ω0t
T
ФНЧ
ϕ (t )
Q(t )
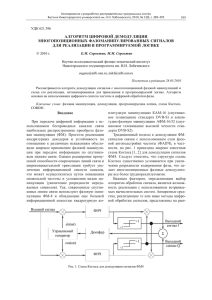
Рис. 1. Схема квадратурного демодулятора
Один из наиболее эффективных методов анализа сигналов с угловой манипуляцией — фазо-цифровое преобразование (ФЦП) и обработка полученной «фазовой линии». Во многих современных приемниках применяется метод квадратурной демодуляции [3], схема которого показана на рис. 1. В основе метода лежит
выделение двух компонент — I (in-phase, синфазная) и Q (quadratute, квадратурная) путем умножения на опорную частоту. Такое преобразование можно выполнить с помощью современной элементной базы как в аналоговом, так и в цифровой виде. Результаты умножения пропускаются через фильтр низких частот для
подавления суммарной составляющей в спектре в области удвоенной опорной
частоты. Для получения фазовой линии затем необходимо вычислить арктангенс
частного двух компонент:
Серия РАДИОФИЗИКА. Вып. 2
Q(t )
,
I (t )
ϕ (t ) = arctg
107
(3)
где
2
2
cos ω0t , Q(t ) = LP x(t ) ⋅
sin ω0t .
I (t ) = LP x(t ) ⋅
T
T
Здесь
ϕ (t )
— фаза сигнала,
ω0
(4)
— опорная частота, LP— фильтр низких час-
тот (Lowpass).
На качество фазовой линии влияют шумовые факторы. Обусловленное эффектом Доплера отклонение несущей частоты от опорной приводит к тому, что фазовая линия приобретает пилообразный вид. Добавление шума, особенно мультипликативного, влечет появление фазовой шумовой составляющей. Наконец, в реальном сигнале манипуляции на фазовой линии представляют собой не мгновенные (скачкообразные), а достаточно плавные изменения фазы.
При приеме реальных фазоманипулированных сигналов на фоне шумов одним
из наиболее неприятных последствий искажения сигнала является «обратная работа» — при потере одного разрыва фазы весь дальнейший двоичный код оказывается инвертированным до возникновения следующей подобной ошибки.
В работе предлагается адаптивный алгоритм декодирования сигналов на основе фильтра автоподстройки фазы. Спецификой разработанного алгоритма является возможность реализации на ПЛИС или ЦПОС.
Рассмотрим принцип декодирования с автоподстройкой фазы на примере фазоманипулированнных сигналов.
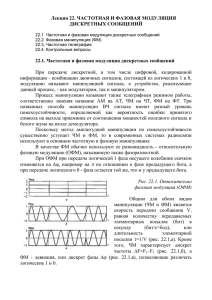
В соответствии с (1) для фазы ФМ-сигнала с M разрешенными состояниями на
фазовой плоскости существует M точек, вблизи которых она находится с наибольшей вероятностью (рис. 2, белые
кружки). ОпределеФМ2
ФМ4
1
ние текущего значения модулирующей
2
0
2
0
последовательности
основано на оценке
3
того, к какой из этих
точек ближе находится текущее знаРис. 2. Приведение фазы и адаптация
чение фазы, т.е. достаточно определить
сектор, в котором она находится. Каждому из секторов соответствует определенное значение кода. В реальных условиях из-за эффекта Доплера со временем все
M точек, соответствующие передаче разных значений, будут смещаться, приводя к
«обратной работе». Для предотвращения этого явления используется адаптивная
автоподстройка фазы.
Для каждого отсчета дискретизованной функции фазы (серый кружок на
рис. 2) определяется его принадлежность к одному из секторов. На выходе данно-
108
Вестник ННГУ им. Н.И. Лобачевского
го фильтра получается код нормализованной фазы yi. Этот код можно выбирать в
определенные моменты времени для получения декодированной модулирующей
последовательности. Процесс адаптации заключается в таком повороте фазовой
плоскости вместе со всеми секторами на малый угол ∆ , чтобы рассогласование
между входным значением фазы и центром сектора, к которому оно приведено,
уменьшилось (стрелки на рис. 2).
Принцип работы алгоритма адаптивной автоподстройки может быть представлен как решение задачи оптимизации:
2π
yi = arg min ϕi − (α i + z ⋅
, z ∈ {0, 1,... M − 1} ,
M
(5)
i — временной индекс обрабатываемого фильтром отсчета, ϕ i — отсчет фазовой линии, z — итерационный параметр, пробегающий ограниченный ряд це-
где
лых последовательных значений, соответствующих разрешенным значениям фазы; α i — параметр фильтра, имеющий физический смысл фазы сигнала, соответствующей передаче нулевого бита. Этот параметр является для фильтра адаптируемым, процесс адаптации можно представить в следующем виде:
α i +1
2π
∆, ϕ i > α i + y i ⋅ M
= αi +
.
2π
− ∆ , ϕ i < α i + y i ⋅
M
(6)
Здесь ∆ — константа, имеющая смысл скорости адаптации (или степени
демпфирования). Диапазон выбора конкретного значения ∆ для (5) ограничен с
обеих сторон. В реальных сигналах фазовая линия имеет обусловленную эффектом Доплера линейно изменяющуюся аддитивную составляющую. Адаптация при
этом должна успевать нейтрализовать набег фазы для предотвращения искажений
битового кода. Это требование накладывает ограничение на минимальную скорость адаптации. При обработке ФМ-сигнала с узкой полосой частот и медленными переходами фазы между центрами секторов слишком высокая скорость адаптации может приводить к потере манипуляций, так как изменение фазы нейтрализуется как паразитный набег фазы, в результате чего произойдет переход к обратной работе. Учет этого факта накладывает ограничение на максимальную скорость адаптации.
При работе с шумовым участком сигнала результатом адаптации будет хаотическое вращение фазовой плоскости. При появлении несущей частоты фазовая
плоскость ориентируется так, что фаза с подавляющей вероятностью находится в
окрестности полюсов — центров секторов, отмеченных на рис. 2 белыми кружками. Степень малости этой окрестности зависит от уровня фазового шума.
Серия РАДИОФИЗИКА. Вып. 2
109
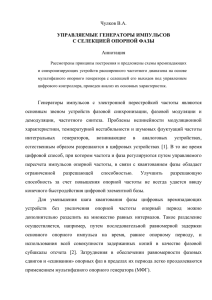
Рисунок 3 иллюстрирует работу алгоритма. Линия 1 — фазовая линия входного ФМ2-сигнала, линия 2 представляет результат приведения входного значения в
каждый момент времени к центру одного из секторов фазовой плоскости (так называемая нормализованная фаза). На выходе фильтра в значительной степени
сглажены фазовые шумы, манипуляции являются мгновенными, такой сигнал
удобен для дальнейшего анализа.
. 3.
-
Рис. 3. Иллюстрация работы адаптивного фильтра фазовой автоподстройки
При использовании алгоритма для декодирования ЧМ-сигналов на вход
фильтра следует подавать не фазовую линию, а регуляризованную оценку ее производной.
Передискретизация последовательности нормализованных кодов фазы с частотой, равной частоте передачи бит, дает искомый модулирующий двоичный код.
Для обеспечения надежного декодирования и предотвращения характерных вставок и пропусков бит необходимо следить за тем, чтобы моменты времени, в которые производится выборка значений, приходились как можно ближе к серединам
битовых сегментов. Это условие позволяет повысить помехозащищенность алгоритма по сравнению с традиционными методами.
Описанный алгоритм анализа ФМ-сигналов может быть реализован с помощью вычислительной процедуры на базе простых целочисленных операций и легко перенесен на недорогие модели цифровых ЦПОС, а также на ПЛИС.
В рамках данной работы было проведено исследование алгоритма на устойчивость на основе метода математического моделирования. Исследование проводилось путем анализа сигнала ФМ2, содержащего кодовую посылку на фоне коррелированного с сигналом шума в полосе, соответствующей полосе частот сигнала.
Декодирование производилось для значений соотношения сигнал/шум от +15 до 0
дБ. В результате было выявлено, что при соотношении сигнал/шум больше +5 дБ
вероятность ошибочного принятия бита меньше 10-6, однако при усилении шумов
до +3 дБ вероятность ошибки повышается до 10-3.
110
Вестник ННГУ им. Н.И. Лобачевского
ЛИТЕРАТУРА
1. Marc Stebber J. PSK Demodulation (Part 1). WJ Communications, Inc, 2001.
2. Стешенко В.Б. Цифровые разомкнутые схемы демодуляторов сигналов с частотной и
фазовой манипуляцией // Цифровая обработка сигналов. 2003. № 2. С. 37.
3. Скляр Б. Цифровая связь: теоретические основы и практическое применение. 2-е изд.
М.: Вильямс, 2003.
4. Madisetti V.K., Williams D.B. The Digital Signal Processing Handbook. CRC Press, 1998.