Оптимизация многосенсорного спутникового измерения
реклама

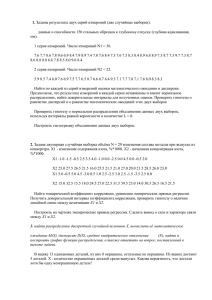
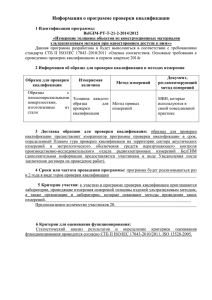
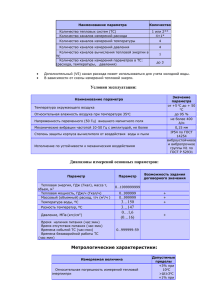
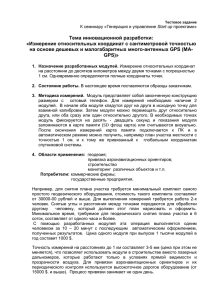
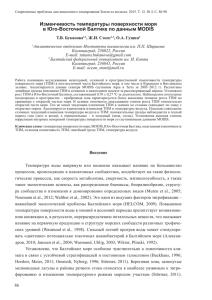
Статья поступила в редакцию 20.07.12. Ред. рег. № 1371 The article has entered in publishing office 20.07.12. Ed. reg. No. 1371 УДК 522.8; 53.082.5; 504.42 ОПТИМИЗАЦИЯ МНОГОСЕНСОРНОГО СПУТНИКОВОГО ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ ПОВЕРХНОСТИ МОРЯ В ИНФРАКРАСНОМ ДИАПАЗОНЕ К.Х. Исмаилов, А.Т. Джамалов Национальное аэрокосмическое агентство Азербайджан, Баку, AZ1106, ул. С.С. Ахундова, д. 1 Тел.: 994503247240, e-mail: asadzade@rambler.ru Заключение совета рецензентов: 15.08.12 Заключение совета экспертов: 20.08.12 Принято к публикации: 25.08.12 Предложена схема многосенсорного измерения поверхностной температуры моря, в которой используются 3 измерителя: (1) спутниковый ИК спектрорадиометр; (2) буйковый контактный измеритель; (3) буйковый солнечный фотометр. Показано, что суммарная погрешность измерения ТМП складывается из следующих частных погрешностей: (1) погрешность измерения ТМП с помощью ИК радиометра; (2) погрешность контактных буйковых измерений с учетом автокорреляционной функции температуры двухмерного поля морской поверхности. Показано наличие минимальной точки в зависимости суммарной погрешности от величины отношения расстояния от спутника до буя к высоте полета спутника, что обусловливает возможность оптимизации проведения аналогичных измерений. Ключевые слова: температура поверхности моря, оптимизация, измерения, атмосфера, контактные измерения, пары воды. OPTIMIZATION OF MULTI-SENSOR SATELLITE MEASUREMENTS OF SEA SURFACE TEMPERATURE IN INFRARED BAND K.Kh. Ismaylov, A.T. Djamalov National Aerospace Agency 1 Ahundov str., Baku, AZ1106, Azerbaijan Tel.: 994503247240, e-mail: asadzade@rambler.ru Referred: 15.08.12 Expertise: 20.08.12 Accepted: 25.08.12 The scheme of multi-sensor measurements of sea surface temperature is suggested, where three measuring devices are used: (1) satellite IR spectroradiometer; (2) in situ measuring buoy; (3) sun photometer installed at buoy. It is shown, that the total error SST measuring contains following partial errors: (1) error of in situ measuring buoys taking into consideration the autocorrelation function of temperature of sea surface. It is shown, that the dependence of total error on ratio of distance from satellite to buoy on satellite flight height has a minimum, which conditions the possibility of carrying out of optimum measurements. Keywords: sea surface temperature, optimization, atmosphere, in situ measurements, water vapors. Как указывается в работе [1], температура поверхности моря (ТПМ) является важнейшим геофизическим параметром, обеспечивающим граничное условие, используемое при оценке тепловых потоков на стыке воздух-море. Значение величины этого показателя важно для моделирования климата, исследования теплового баланса Земли, выяснения различных циркуляционных аномалий в атмосфере и в океанах. Основными спутниковыми методами измерения ТПМ являются термальная инфракрасная радиометрия и пассивная микроволновая радиометрия. В настоящее время согласно потребностям климатологии 170 требуемая точность измерения ТПМ находится на уровне 0,3 К, достигнутая точность же в настоящее время равна 0,6 К [1]. Термальный метод ИК измерений ТПМ обычно осуществляется на длинах волн 3,7 мкм и 10 мкм. При этом диапазон 3,7 мкм является каналом для ночных измерений вследствие сильного влияния ИК излучения Солнца. Оба канала подвержены влиянию облаков, водяных паров и крупнодисперсного аэрозоля. К термальным измерителям ТПМ относятся такие спектрорадиометры, как AVHRR (POES NOAA); AT SR (ERS-2); MODIS (EOS NASA, Terra, Aqua). International Scientific Journal for Alternative Energy and Ecology № 09 (113) 2012 © Scientific Technical Centre «TATA», 2012 К.Х. Исмаилов, А.Т. Джамалов. Оптимизация многосенсорного спутникового измерения температуры поверхности моря В качестве примера микроволнового радиометрического измерения ТПМ можно указать микроволновые радиометры SMMR (Nimbus-7, Seasat); TRM TM1 и AMSR, установленные на спутниках Aqua и ADEOS. Эти микроволновые радиометры работают в основном в диапазонах 7 ГГц и 21 ГГц. Точность измерения ИК метода намного выше, чем точность микроволнового метода; это объясняется неравномерным распределением спектральной энергии Солнца в ИК и микроволновом диапазонах. Указанное положение хорошо иллюстрируется на рис. 1, где показаны, соответственно, линии регрессии между результатами измерений с помощью ИК радиометра и буйкового контактного измерителя. а ной молекулярного уровня в реальном случае является неизмеримой. Поверхностный слой воды толщиной 10 мкм характеризуется как ТПМ собственно «поверхностного слоя». При этом постоянная затухания термальной ИК радиации соответствует этой толщине. ТПМ «подповерхностного слоя» относится к толщине 1 мм, которая соответствует постоянной ослабления радиации микроволнового диапазона. Ниже указанной глубины (1 мм – 1 м) происходит уменьшение температуры, которая принимается в качестве «околоповерхностной ТПМ». При этом следует иметь в виду, что околоповерхностная температура обычно измеряется с помощью буев и кораблей. Разница между поверхностной и подповерхностной температурами измеряется в течение дня и может достигать 1 К. Очевидно, что при сравнении результатов измерений с помощью спектрорадиометров, микроволновых радиометров и буев должно быть учтено наличие вышеуказанного температурного градиента под поверхностью морских вод. Основными факторами, влияющими на точность измерения ТПМ, являются: – ветер; – водяные пары; – другие атмосферные факторы (облака и др.). Далее в настоящей статье мы рассмотрим возможность оптимизации процедуры измерения и калибровки ТПМ с помощью ИК спектрорадиометра с учетом влияния суммарного количества водяных паров в атмосфере. Задачу исследования сформулируем следующим образом. Допустим, что ИК спектрорадиометр, установленный на спутнике, осуществляет измерение ТПМ, и далее результат измерения с целью калибровки и валидации сравнивается с результатом контактных измерений, осуществляемых на буе. При этом считаем, что буй также снабжен солнечным фотометром, осуществляющим измерение (рис. 2) суммарного количества водяных паров или общего количества осаждаемой воды. b Рис. 1. Регрессия между величинами ТМП, измеренными AVHRR и буем (а) и TRM TM 1 и буем (b) Fig. 1. Regression dependence between SST measured by AVHHR and buoy (a) and TRM TM 1 and buoy (b) Основные физические особенности зависимости ТПМ от глубины измерения заключаются в следующем [1]. Температура поверхностного слоя толщи- Рис. 2. Схематическое изображение процесса измерения ТПМ и калибровки с помощью результатов измерений на буе Fig. 2. Schematic representation of the process of SST measurements and calibration by help of results of measurements at buoy Международный научный журнал «Альтернативная энергетика и экология» № 09 (113) 2012 © Научнотехнический центр «TATA», 2012 171 Энергетика и экология Таким образом, весь рассматриваемый процесс можно разделить на две стадии: 1. Измерение с помощью спутникового ИК радиометра температуры поверхностного слоя моря. 2. Сравнение результата спутниковых измерений с результатом измерений на буе. Основной погрешностью измерений на первой стадии является влияние суммарных водяных паров на результат измерений. Проанализируем указанную погрешность. Отметим, что суммарное количество водяных паров, оказывающее мешающее воздействие на точность результатов спутниковых измерений, зависит от взаимного расположения ИК радиометра и буя (рис. 1). На самом деле, если обозначить суммарное количество осаждаемой воды в зенитном направлении AA' как PW, то при спутниковых измерениях ТПМ по траектории AO эффективно воздействующее значение осаждаемой воды будет равно PWef = PW cos α . (1) Из физических соображений ясно, что для аналитической оценки процесса измерений ТПМ с помощью бортового ИК радиометра можно было бы воспользоваться математическим аппаратом закона Бугера-Бера. Однако целесообразным представляется использование результатов экспериментальных исследований, приведенных в [2], где показаны зависимости с.к.о. данных измерения ТПМ в зависимости от суммарного количества осаждаемой воды (рис. 3). где σ10 = σ1 при PW → ∞; C1 и C2 – постоянные величины, которые могут быть определены по методу наименьших квадратов. Во второй стадии процедуры измерения и калибровки результаты измерений сравниваются с калибровочной величиной, определяемой результатом контактных измерений, проводимых автоматическими устройствами на буе. Однако взаимное геометрическое расположение спутника и буя, характеризующееся ненулевой величиной дистанции L = AB, приводит к наличию специфической погрешности калибровки, вызванной дискретностью размещения буев на пространстве морской поверхности. Для определения погрешности дискретности калибровки вычислим средний квадрат погрешности контактных измерений ТПМ в точках A и B. Имеем ( σ 22 X A − X B ) 2 = X A2 − 2 X A X B + X B2 , где X – результат буйковых измерений. Из (3) получим σ 22 = 2 D ⎡⎣1 − R ( L )⎤⎦ , (4) где σ2 – с.к.о. погрешности калибровки; D – дисперсия буйковых измерений; R(L) – автокорреляционная функция; X A – означает операцию статистического усреднения значений XA. Рассмотрим существующие модели корреляционной функции, предлагаемые различными авторами. Так, в работе [3] в одномерном случае предлагается следующий вид функции R(L): R ( L ) = e − aLhβ , (5) где a = 0,007; β = 0,75; L – измеряется в км. В работе [4] в одномерном случае предлагается другой вид корреляционной функции: 3 R2 ( L ) = (1 − L L0 ) e − L 2 Рис. 3. Значение с.к.о. результатов измерений ТПМ, осуществленных AMSR в зависимости от суммарного количества осаждаемой воды в мм. Цифрами указаны: 1, 3 – кривые зависимости с.к.о. измерения ТПМ от общего количества осаждаемой воды; 2 – систематическая погрешность измерений Fig. 3. Values of r.s.m. of results of SST measurements carried out by AMSR in dependence of total amount of precipitable water in mm. Numbers mean: 1, 3 – curves of dependence of r.s.m. of measurement of SST on total of precipitable water; 2 – systematic error of measurements Как видно из графиков, приведенных на рис. 3, среднее квадратическое отклонение (с.к.о.) результатов измерений может быть аппроксимировано следующим выражением σ1 = σ10 + C1e − C2 PW cos α , 172 (3) (2) 2 2 L20 , (6) где L0 – расстояние декорреляции. Для удобства в дальнейшем воспользуемся формулой (6). С учетом выражений (2) и (6), а также приняв σ10 = 0 и обозначив cos α = h h 2 + L2 , получим σ = 2 D ⎡⎣1 − (1 − L2 2 L20 )⎤⎦ + C12 e 2 ∑ − 2 C2 PW h 2 + L2 h . (7) С целью дальнейших упрощений формулы (7) допускаем, что L0 = h; L L0 = x; x 2 2 << 1 . С учетом таких упрощающих предположений получаем σ 2∑ = ( 2 x − x 2 ) 1 − ( x 2 2) + 2D ( ( ) ) + (C12 2 D ) 1 − C2 PW 1 + x 2 . International Scientific Journal for Alternative Energy and Ecology № 09 (113) 2012 © Scientific Technical Centre «TATA», 2012 (8) К.Х. Исмаилов, А.Т. Джамалов. Оптимизация многосенсорного спутникового измерения температуры поверхности моря Вычисленный график выражения (8) при C2 = 1 PW ; C12 2 D = 0, 3 приведен на рис. 4. Как видно из графика на рис. 4, в точке x ≈ 1,8 величина σ 2∑ 2D достигает своего минимального значения. На практике это означает существование такой величины угла α (рис. 2), при котором суммарная погрешность измерения калибровки достигает минимальной величины. σ 2∑ 2D 10,0 7,5 5 В заключение сформулируем основные результаты и выводы проведенного исследования: 1. Предложена схема многосенсорного измерения поверхностной температуры моря, в которой используются 3 измерителя: (1) спутниковый ИК спектрорадиометр; (2) буйковый контактный измеритель; (3) буйковый солнечный фотометр. 2. Показано, что суммарная погрешность измерения ТПМ складывается из следующих частных погрешностей: (1) погрешность измерения ТПМ с помощью ИК радиометра; (2) погрешность контактных буйковых измерений с учетом автокорреляционной функции температуры двухмерного поля морской поверхности. 3. Показано наличие минимальной точки в зависимости суммарной погрешности от величины отношения расстояния от спутника до буя к высоте полета спутника, что обусловливает возможность оптимизации проведения аналогичных измерений. Список литературы 2,5 1 1,8 2 3 х Рис. 4. Экстремальный вид зависимости суммарной погрешности от х Fig. 4. Extreme type dependence of total error on х Таким образом, исходя из вышеизложенного, можно заключить, что операция дистанционного ИК измерения ТПМ и сравнения результатов таких измерений с результатами буйковых контактных измерений характеризуется суммарной погрешностью с характерным минимальным значением. Обнаруженное свойство процесса дистанционного измерения ТПМ позволяет ставить и решать оптимизационные задачи при проведении таких измерений. 1. M.J. Infrared and microwave remote sensing of sea surface temperature (SST); www2.hawaii.edu/ ~jmaurer/sst/. 2. Hosoda K., Murakami H., Shibata A., Sakaida F., Kawamura H. Difference characteristics of sea surface temperature observed by GLI and AMSR aboard ADEOS-II // Journal of Oceanography. 2006. Vol. 62. P. 339-350. 3. Fu W., Hoyer J.L., She J. Assessment of the three dimensional temperature and salinity observational networks in the Baltic Sea and North Sea // Ocean Sci. 2011. No. 7. P. 75-90; www.ocean-sci.net/7/75/2011/ doi:10.5194/os-7-75-2011. 4. Guan L., Kawamura H. Merging satellite infrared and Microwave SSTs: Methodology and Evaluation of the New SST // Journal of Oceanography. 2004. Vol. 60. P. 905-912. Международный научный журнал «Альтернативная энергетика и экология» № 09 (113) 2012 © Научнотехнический центр «TATA», 2012 173