АДАПТИВНОЕ И РОБАСТНОЕ УПРАВЛЕНИЕ C
реклама

Бобцов Алексей Алексеевич
Пыркин Антон Александрович
АДАПТИВНОЕ И РОБАСТНОЕ
УПРАВЛЕНИЕ C КОМПЕНСАЦИЕЙ
НЕОПРЕДЕЛЕННОСТЕЙ
Внешнее
возмущение
+
–
Задающее
воздействие
b(p)
a(p)
???
Регулятор
Запаздывание
Запаздывание
Санкт-Петербург
2013
Объект
управления
Выход
Министерство образования и науки Российской Федерации
Санкт-Петербургский Национальный Исследовательский
Университет Информационных Технологий, Механики и Оптики
Кафедра систем управления и информатики
Бобцов Алексей Алексеевич,
Пыркин Антон Александрович
АДАПТИВНОЕ И РОБАСТНОЕ
УПРАВЛЕНИЕ С КОМПЕНСАЦИЕЙ
НЕОПРЕДЕЛЕННОСТЕЙ
Учебное пособие
Санкт-Петербург
2013
УДК 681.51, 681.53, 681.58
Бобцов А.А., Пыркин А.А. Адаптивное и робастное управление с
компенсацией неопределенностей. Учебное пособие. — СПб.: НИУ
ИТМО, 2013. — 135с.
Учебное пособие посвящено исследованию современных методов адаптивного и робастного управления линейными и нелинейными объектами
в условиях запаздывания и параметрически не определенных мультисинусоидальных
авторами
возмущений.
алгоритмы
Описаны
оценивания
оригнальные,
параметров
разработанные
возмущающих
воздей-
ствий. Рассмотрены способы адаптивной компенсации неизмеряемых
возмущений для устойчивых и неустойчивых систем с запаздывающим
управлениям
по
измерениям
только
выходной
переменной.
Пособие
предназначено для студентов старших курсов факультета компьютерных технологий и управления НИУ ИТМО, специализирующихся по
направлениям
подготовки
220100
Системный
анализ
и
управление,
220400 Управление в технических системах и 221000 Мехатроника и
робототехника.
Илл. 27, список литературы — 99 наим.
Одобрено на заседании кафедры СУиИ, протокол № 2 от 05.04.2012
Одобрено Ученым советом факультета КТиУ, протокол № 7 от 11.09.2012
В 2009 году Университет стал победителем
многоэтапного
конкурса,
в
результате
которо-
го определены 12 ведущих университетов России, которым присвоена категория “Национальный исследовательский университет”. Министерством образования и науки Российской Федерации была утверждена программа его развития на 2009-2018 годы. В 2011
году Университет получил наименование “Санкт-Петербургский национальный исследовательский университет информационных технологий,
механики и оптики”.
c
○
Санкт-Петербургский национальный исследовательский университет
информационных технологий, механики и оптики, 2013
c
○
Бобцов А.А., Пыркин А.А., 2013
Оглавление
Введение
Глава 1
6
Обзор методов управления в условиях запаз-
дывания и возмущений. Постановка задачи
1.1
1.2
14
1.1.1
Предиктор Смита . . . . . . . . . . . . . . . . .
17
1.1.2
Предиктор на основе метода М. Крстича
19
Глава 2
. . .
Обзор методов управления в условиях возмущающих
воздействий
1.3
14
Обзор методов управления в условиях запаздывания
. . . . . . . . . . . . . . . . . . . . . . . .
23
Обобщенная постановка задачи . . . . . . . . . . . . .
26
Методы построения адаптивных наблюдателей
мультигармонических сигналов
2.1
Алгоритм
адаптивной
29
идентификации
смещенного синусоидального сигнала
параметров
. . . . . . . . .
30
. . . . . . . . . . . . . . . .
30
2.1.1
Постановка задачи
2.1.2
Алгоритм идентификации частоты смещенного гармонического сигнала . . . . . . . . . . . .
2.1.3
2.1.4
2.2
31
Алгоритм идентификации смещения, амплитуды и фазы . . . . . . . . . . . . . . . . . . . .
37
Числовой пример
42
. . . . . . . . . . . . . . . . .
Алгоритм адаптивной идентификации частот и наблюдатель гармоник мультигармонического сигнала .
47
2.2.1
47
2.2.2
Постановка задачи
. . . . . . . . . . . . . . . .
Алгоритм идентификации частот смещенного
мультигармонического сигнала
. . . . . . . . .
48
4
ОГЛАВЛЕНИЕ
2.2.3
2.2.4
2.3
Алгоритм идентификации смещения, амплитуд и фаз гармоник . . . . . . . . . . . . . . . .
51
Числовой пример
56
. . . . . . . . . . . . . . . . .
Заключительные выводы по главе
Глава 3
. . . . . . . . . . .
61
Компенсация мультигармонических возмуще-
ний для устойчивых объектов с запаздыванием в
управлении
3.1
62
Алгоритм компенсации мультигармонического возмущения, действующего на устойчивый линейный
3.2
объект управления с запаздыванием . . . . . . . . . .
64
3.1.1
Постановка задачи
. . . . . . . . . . . . . . . .
64
3.1.2
Алгоритм адаптивной идентификации частот .
65
3.1.3
Синтез закона управления . . . . . . . . . . . .
69
3.1.4
Числовой пример
77
. . . . . . . . . . . . . . . . .
Алгоритм компенсации мультигармонического возмущения, действующего на устойчивый нелинейный
3.3
объект управления с запаздыванием . . . . . . . . . .
82
3.2.1
Постановка задачи
83
3.2.2
Преобразование нелинейной системы . . . . . .
84
3.2.3
Алгоритм адаптивной идентификации частот .
86
3.2.4
Синтез закона управления . . . . . . . . . . . .
87
3.2.5
Числовой пример
92
. . . . . . . . . . . . . . . . .
Экспериментальные исследования алгоритма управления
3.4
. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Заключительные выводы по главе
Глава 4
. . . . . . . . . . .
93
94
Компенсация мультигармонических возмуще-
ний для неустойчивых объектов с запаздыванием в
управлении
96
4.1
Постановка задачи
4.2
Алгоритм
. . . . . . . . . . . . . . . . . . . .
стабилизации
неустойчивого
управления с запаздыванием
4.3
97
объекта
. . . . . . . . . . . . . .
98
Алгоритм адаптивной идентификации частот и наблюдатель гармоник мультигармонического возмущения . . . . . . . . . . . . . . . . . . . . . . . . . . . .
104
Оглавление
4.4
5
Алгоритм компенсации мультигармонического возмущения,
действующего
на
управления с запаздыванием
неустойчивый
объект
. . . . . . . . . . . . . .
109
. . . . . . . . . . . . . . . . . . . . .
115
4.5
Числовой пример
4.6
Заключительные выводы по главе
. . . . . . . . . . .
119
Заключение
120
Литература
122
Введение
В теории автоматического управления особое место занимают
системы с запаздыванием, задача управления которыми всегда привлекала внимание многих исследователей [8, 10–14, 17, 18, 23–27, 29–
36, 40, 51, 53–58, 62, 63, 63, 64, 67, 68, 70–73, 78–80, 82–84, 88–91, 93–95,
97–99]. Выделение объектов с запаздыванием в отдельный класс
вызвано, прежде всего, сложностью их исследования по сравнению
с объектами, не содержащих временного запаздывания. Характерной особенностью систем управления для объектов с запаздыванием является зависимость состояния управляемого процесса от
предыстории, и пренебрежение влиянием запаздывания приводит
к ухудшению качества функционирования системы.
Эффект запаздывания особенно ярко проявляется при автоматическом управлении высокоскоростными самолетами, ракетами и
сложными системами при наличии больших расстояний. Запаздывание реакции управляющей системы на возникшее нарушение процесса приводит, как правило, к возникновению автоколебаний в замкнутой системе, а нередко и к потере устойчивости.
Транспортное запаздывание может возникать в силу конструктивных
особенностей
системы.
Например,
при
автоматическом
управлении впрыском топлива в инжекторном двигателе внутреннего сгорания анализатор выхлопного газа проблематично поместить непосредственно в камере сгорания [56]. Решение задачи
поддержания заданного стехиометрического соотношения является
экологически и экономически выгодным, поскольку с одной стороны в атмосферу не выбрасываются вредные вещества, вызванные
частичным сгоранием топлива, а с другой стороны производится
оптимальный по объему впрыск топлива, необходимый для функ-
Введение
7
ционирования двигателя.
Бурный рост информационно-коммуникационных технологий
привел к обширному использованию цифровых контроллеров в современных системах автоматики. Простота реализации, недорогая
стоимость и малые габариты — все это привело к замене классических аналоговых регуляторов цифровыми. Однако, несмотря на
относительно высокое быстродействие современные контроллеры,
в силу сложности алгоритма управления, могут вызывать крайне
нежелательное запаздывание.
При синтезе законов управления сложными химическими реакторами запаздывание имеет место в силу особенностей протекания
химических реакций. Также запаздывание можно встретить, работая с экологическими, эволюционными, организационными, транспортными системами и многими другими.
При необходимости учитывать время запаздывания в математической модели следует использовать уравнения в форме, более
общей, чем дифференциальная, а именно — дифференциальноразностные уравнения, представляющие собой более общий класс
функциональных
уравнений.
Математическая
модель
в
виде
дифференциально-разностных уравнений охватывает в частных
случаях процессы, описываемые дифференциальными уравнениями (то есть непрерывные системы регулирования), и процессы,
описываемые разностными уравнениями (то есть импульсные системы регулирования). Кроме чистого запаздывания, рассмотрение которого приводит к дифференциально-разностным уравнениям, в системах управления встречаются так называемые распределенные запаздывания. Такое запаздывание наблюдается в системах
с распределенными параметрами, описываемыми дифференциальными уравнениями в частных производных. В теории регулирования встречается также понятие эквивалентного запаздывания, которое используется при замене дифференциальных уравнений высокого порядка дифференциально-разностными уравнениями низкого порядка или нелинейных дифференциальных уравнений, линейными дифференциально-разностными уравнениями.
В настоящее время имеется большое количество работ по исследованию систем с запаздыванием [68]. Отметим, что использование
функций Ляпунова для исследования устойчивости данного типа
систем нельзя рассматривать в качестве общего подхода, посколь-
8
Введение
ку теоремы прямого метода Ляпунова не допускают обращения.
Поэтому большое значение имели работы [17, 29, 31], где для анализа устойчивости было предложено рассматривать вместо функций
Ляпунова функционалы Ляпунова-Красовского, обладающие аналогичными свойствами.
Системы с запаздыванием можно разделить на три класса:
– объекты с запаздыванием по управлению;
– объекты с запаздыванием по состоянию, из которых можно
выделить особый класс объектов — объекты нейтрального типа;
– объекты с запаздыванием по управлению и состоянию.
Синтез систем управления для объектов с запаздывающим
управлением требует учета влияния величины запаздывания на
устойчивость и качество переходных процессов в замкнутой системе. Уникальным подходом была идея Отто Смита [95]. Она заключалась в построении системы управления, в которой запаздывание
не влияет на устойчивость и качество переходных процессов. Недостатками такого подхода является то, что он расчитан только на
асимптотически устойчивые объекты управления, а также необходимость точного знания всех параметров системы. В последующие
годы учеными со всего мира исследовались и были решены более
сложные постановки задач управления в условиях запаздывания:
для дискретных объектов управления [35], для параметрически не
определенных объектов управления [18, 30, 57, 84], для неустойчивых объектов управления [68].
В настоящее время нет удовлетворительных решений, связанных с синтезом регуляторов в условиях временного запаздывания
и возмущений. Задача компенсации внешних возмущающих воздействий относится к фундаментальным проблемам современной
теории автоматического управления. Особый интерес представляют задачи управления по выходу, как линейными и нелинейными,
так и устойчивыми и неустойчивыми объектами.
Весьма наглядный пример сложной технической системы, функционирующей в условиях нестационарной внешней среды, — надводное судно. В открытом море судно подвергается возмущениям,
Введение
9
имеющим различную природу и происхождение. Выделяют три типа возмущений, существенно влияющих на качество управления:
ветровые воздействия, волновые воздействия и течение. Система
автоматического управления движением судна может решать различные задачи: стабилизация курса, движение вдоль заданной траектории, стабилизация продольной и поперечной скоростей, динамическое позиционирование в точке. К системам автоматического
управления движением предъявляются жесткие требования к динамическим и точностным показателям качества. Например, для
задачи стабилизации курса установившаяся ошибка не должна превышать значение
1
градуса. Для нефтеналивных судов большого
водоизмещения, длина которых может быть более
100 метров, необ-
ходимо синтезировать системы динамического позиционирования в
точке. При том, что судно может находиться под нефтяной вышкой
более суток, система управления должна обеспечивать точность позиционирования с отклонением не более
20 см при различного рода
возмущениях.
Более сложными техническими объектами в смысле управления
являются летательные аппараты, обладающие сравнительно высокими скоростями полета. Сложность объясняется повышенными
требованиями к безопасности движения. При этом сам летательный аппарат подвержен весьма серьезным внешним воздействиям:
ветер, зоны турбулентности, грозовые тучи, и многое другое, характерное для данного типа объектов управления.
Нормальное функционирование высокоточных оптических систем требуют относительно спокойной и неподвижной внешней среды. Наличие возмущающих воздействий может крайне негативно
сказываться на работе такой системы, поэтому влияние возмущения должно быть устранено. В прецизионном электроприводе необходимо минимизировать траекторную ошибку с помощью компенсации возмущающих воздействий. Задача компенсации возмущений решается стендами активной виброзащиты.
Заданную траекторию при движении орбитального тела сохраняет только центр масс, а весь корабль под действием различных
возмущающих моментов может вращаться относительно системы
координат, связанной с центром масс. Чтобы корпус корабля был
неподвижен относительно своего центра, необходимо его стабилизировать в нужном положении. Управление кораблем или орбиталь-
10
Введение
ной космической станцией — это не только стабилизация его относительно центра масс, но и ориентация по отношению к внешней
системе координат, например, по отношению к Солнцу. Сохранению
же полученной ориентации будут препятствовать различного рода
регулярные и нерегулярные возмущения, компенсация которых и
составляет задачу стабилизации.
Система
стабилизации
должна
работать
непрерывно,
быть
очень чувствительной к возмущающим моментам, которые могут
иметь самое разнообразное происхождение, величину и продолжительность действия. Причин возможных внешних возмущений —
десятки. Это и силы аэродинамического сопротивления, и гравитационное и магнитное поля Земли, и давление солнечной радиации,
и столкновение с метеорами, возможные толчки и удары при встрече с другими космическими аппаратами. Источники возмущающих
моментов могут находиться как внутри орбитальной космической
станцией, так и вне ее.
Внутренние возмущения могут быть вызваны не только работой
подвижных частей оборудования, но и перемещениями членов экипажа. Если возмущения не компенсировать постоянно, то импульс
момента может быть очень большим, а угловые скорости вращения
будут расти неограниченно и станция может раскрутиться до большой скорости. Внешние возмущения естественного происхождения
— аэродинамического, гравитационного или магнитного — характеризуются, с одной стороны, весьма малыми значениями возмущающего момента, с другой стороны, довольно большой продолжительностью их действия.
Нет никаких сомнений, что задача активной компенсации возмущающих воздействий является актуальной для широкого класса
технических объектов управления. На сегодняшний день получено
большое число алгоритмов управления в условиях внешних воздействий [2, 3, 6–9, 20, 42, 52, 74–77, 85–87]). Как правило, подходы
к управлению при наличии возмущения предполагают использование интегральных регуляторов, повышение у системы порядка
астатизма или же встраивание известной модели возмущающего
воздействия (комбинированные регуляторы), что в подавляющем
большинстве случаев является сильной идеализацией [5]. Однако,
применение указанных методов ограничивается классом измеряемых, ограниченных возмущений или же возмущений с известной
Введение
11
Внешнее
возмущение
–
Задающее
воздействие
b(p)
a(p)
???
+
Регулятор
Запаздывание
Объект
управления
Выход
Запаздывание
динамической моделью. С развитием адаптивного управления удалось найти более конструктивные решения в классе параметрически и сигнально не определенных детерминированных возмущений [6–9, 20, 25].
При огромном количестве работ, посвященных методам синтеза регуляторов в условиях запаздывания зачастую не рассматривается наличие внешних возмущений, при этом не ясно, является
ли тот или иной предложенный метод пригодным к использованию в реальном техническом объекте. Существует не меньшее количество результатов, где получены адаптивные и робастные схемы
компенсации параметрически не определенных возмущающих воздействий. Однако, при наличии временного запаздывания в контуре управления практически все эти методы становятся неэффективными. В связи с этим студентам предлагается изучить подходы, позволяющие работать в условиях и запаздывания, и действия
внешних возмущений, чему посвящео учебное пособие.
Описанные в учебном пособии подходы базируются на методе
функций Ляпунова,
ных
характеристик
анализе
линейных
амплитудно-фазовых
динамических
звеньев,
частотметоде
“backstepping” Мирослава Крстича. В пособии также использованы общие методы теории автоматического управления и автоматизации технологических процессов, алгебры многочленов и теории
12
Введение
матриц, теории дифференциальных уравнений с отклоняющимся
аргументом.
Практическая значимость рассматриваемых подходов заключается в том, что данные методы управления по выходной переменной
(т. е. без измерения переменных состояния объекта или производных выходного сигнала) могут быть эффективно применены для
широкого класса технических объектов, функционирующих в условиях возмущающих воздействий и запаздывания в каналах управления и измерения. Применение описанных методов позволяет существенно ослабить требования к объему априорной информации
о свойствах среды функционирования объекта управления; значительно снизить затраты на разработку и использование сенсорной
техники для измерения всех переменных состояния системы или
производных выходной переменной; расширить класс технических
объектов, для которых могут быть успешно решены задачи высокоточного управления; повысить надежность системы благодаря устранению дополнительных помех, вызванных использованием датчиков переменных состояния или вычислителей производных
выходной регулируемой переменной.
Структура адаптивного алгоритма оценивания частот возмущения является достаточно простой в реализации, что говорит об инженерной привлекательности такого подхода.
Рассмотренные алгоритмы управления были исследованы на мехатронном маятниковом комплексе “The Mechatronics Control Kit”,
предоставленного фирмой “Mechatronic Systems, Incorporated” [81].
Основным элементом устанвоки является однозвенный маятник,
снабженный маховиком. Маятник может совершать вращение в
вертикальной плоскости. Маховик приводится в движение электродвигателем постоянного тока, который смонтирован на маятнике.
Для исследования работы алгоритма в условиях запаздывания программно создается буфер, через который пропускается функция
управления: сигнал управления подается на вход буфера, а выходной сигнал буфера поступает на объект управления. Величина
имитируемого запаздывания определяется размером буфера. Для
моделирования возмущающего воздействия в сигнал управления,
поступающего на вход объекта управления, можно ввести возмущающую составляющую, которая недоступна для закона управления. Но для исследования алгоритма управления в условиях дей-
Введение
13
ствия реального возмущающего воздействия осуществлен эксперимент, когда возмущение не моделируется программно, а создается
реально. Для этого используется тележка на подвижной основе,
на которой смонтирован маятник. Возмущение, создающее перемещение тележки в горизонтальной плоскости, вызывает устойчивые
колебания маятника.
Методы и алгоритмы, описанные в пособии, основаны на результате по идентификации частоты смещенного синусоидального сигнала [2], и отличаются более простой структурой устройства
оценивания. Приведено доказательство теоремы о том, что ошибка оценивания частоты ограничена затухающей экспоненциальной
функцией времени. На основе оценки частоты был сформирован
алгоритм оценки амплитуды, смещения и начальной фазы сигнала.
Полученный результат был обобщен на случай мультигармонического сигнала.
В пособии предложен оригинальный метод компенсации детерминированного мультигармонического возмущения, действующего
на устойчивые линейный и нелинейный объекты с запаздыванием
в канале управления. В отличие от известных существующих подходов, данный метод применим к объектам, модель которых может
иметь произвольную относительную степень. Данный алгоритм является робастным по отношению к нерегулярной составляющей,
присутствующей в возмущении.
Наиболее значимым является объединение предыдущего результата и метода М. Крстича [68] по стабилизации неустойчивых объектов управления с запаздыванием, что позволило получить новый метод управления неустойчивыми объектами с запаздыванием
в условиях параметрически не определенных возмущающих воздействий.
В пособии дается краткое описание мехатронной установки на
подвижном основании, состоящей из маятника и инерционного колеса. Такая установка позволила осуществить апробацию разработанных алгоритмов управления в условиях запаздывания и возмущающих воздействий.
Глава 1
Обзор методов управления в
условиях запаздывания и
возмущений. Постановка задачи
В главе представлен обзор методов управления в условиях запаздывания и неизмеряемых возмущающих воздействий. Рассмотрен сравнительный анализ существующих методов управления в
условиях запаздывания и в условиях возмущающих воздействий.
Выделены достоинства и недостатки известных подходов. Затем
сформулирована обобщенная постановка задачи, решению которой
посвящены следующие главы пособия.
1.1
Обзор методов управления в условиях запаздывания
В теории автоматического управления особое место занимают системы с запаздыванием, задача управления которыми всегда привлекала внимание многих исследователей [8, 10–14, 17, 18, 23–27, 29–
36, 40, 51, 53–58, 62–64, 67, 68, 70–73, 78–80, 82–84, 88–91, 93–95, 97–99].
Выделение объектов с запаздыванием в отдельный класс вызвано,
прежде всего, большой сложностью их исследования по сравнению
с объектами, не содержащих временного запаздывания. Характерной особенностью систем управления для объектов с запаздыванием является зависимость состояния управляемого процесса от
предыстории, и пренебрежение влиянием запаздывания приводит
1.1. Методы управления в условиях запаздывания
15
к ухудшению качества функционирования системы, а иногда и к
потере устойчивости.
Рассмотрим
апериодическим
простейший
звеном
объект
первого
интегрально-дифференциальный
управления,
порядка,
закон
и
описываемый
пропорционально-
управления.
качества определяются коэффициентами регулятора
Показатели
𝑘𝑝 , 𝑘𝑑
𝑘𝑖
и
(Рис. 1.1).
1,4
s
1
1
–
Задающее
воздействие
1
5
+
kp
1
s
Интегратор
1,2
kd
Производная
1
s+1
+
+
+
Объект
управления
3
0,8
Выход
ki
0,6
0,4
0,2
t, c
0
(а) Структурная схема замкнутой системы
0
2
4
6
8
10
(б) Временная диаграмма
выходной переменной
Рис. 1.1. Система управления с ПИД-регулятором
Если канал измерения характеризуется запаздыванием, то становится затруднительным обеспечение требуемых показателей качества с помощью того же регулятора (Рис. 1.2). При некотором
критическом значении запаздывания система управления потеряет
устойчивость. Это объясняется тем, что звено запаздывания вносит
отрицательный сдвиг фазы в систему.
Пропорционально-интегрально-дифференциальный
алгоритм
управления является достаточно популярным как в теории, так и
в практике, в силу простоты реализации и анализа. Однако, как
показано на рис. 1.1, 1.2 наличие очень маленького запаздывания
делает систему неустойчивой. В этом случае задача настройки
параметров регулятора представляется очень сложной, а может и
вовсе неразрешимой, если сигнал управления ограничен по модулю. В связи с этим задачи управления в условиях запаздывания —
это особый класс задач, требующий специального рассмотрения,
разработки
новых
методов
управления,
ориентированных
на
возможное временное запаздывание в канальной среде.
В статье [26] рассматривается линейный стационарный объект
16
Глава 1. Обзор методов. Постановка задачи
s
1
1
1,6
5
+
–
kp
Задающее
воздействие
1
s
1,8
kd
Производная
1
s+1
Объект
управления
3
Интегратор
+
+
+
1,4
1,2
Выход
1
0,8
ki
0,6
0,4
0,2
Запаздывание
(а) Запаздывание в канале измерения
0
0
t, c
2
4
6
8
10
(б) Неустойчивый процесс
Рис. 1.2. Потеря устойчивости системы управления из-за запаздывания
ℎ = 0, 1
секунд
управления с неизвестными параметрами, характеризуемый переменным запаздыванием в каналах управления и измерения. В работе был получен адаптивный предиктор, дающий упредительные
оценки выходной переменной и переменных состояния. Недостатками этой работы является допущение о полной измеримости вектора
состояния, что на практике встречается довольно редко, и отсутствие в рассмотрении действия возмущающих воздействий.
В статье [51] рассматривается нелинейный объект управления
при наличии запаздывания по состоянию. Задача решена методом
профессора Бобцова “последовательный компенсатор”. Данный метод также позволяет решать задачи слежения в условиях параметрической и функциональной неопределенности [39], неучтенной паразитной динамики, внешних возмущающих воздействий. Данный
метод был успешно применен в задаче стабилизации хаотической
системы Ван-Дер-Поля [46]. В качестве недостатка этого подхода
отметим отсутствие в рассмотрении запаздывания в канале управления или измерения.
В статье [57] решается задача стабилизации линейного объекта управления с запаздыванием по управлению. Группа ученных
профессора Цыкунова А.М. получила достаточно много серьезных
теоретических результатов для систем с входным запаздыванием,
и даже для параметрически не определенных объектов [30–33]. Однако в этих работах не рассматриваются возмущения.
1.1. Методы управления в условиях запаздывания
1.1.1
17
Предиктор Смита
Стабилизация линейных систем с запаздыванием в канале управления продолжает быть областью активных исследований. Различные схемы управления объектами с запаздыванием на входе предложены многими авторами, отправной точкой во многих из них является предиктор Смита [95], специальная структура регулятора,
предложенная Смиттом в 1957 году.
Цель предиктора Смита — предсказать, какой сигнал должен
появиться на выходе до того, как он там появится на самом деле.
Для предсказания можно использовать модель объекта управления, состоящую из дробно-рациональной части
ной задержки
𝑒−𝑠ℎ .
𝑀0 (𝑠)
и транспорт-
Благодаря тому, что из модели можно исклю-
чить задержку, появляется принципиальная возможность предсказания поведения объекта до появления сигнала на его выходе. На
рис. 1.3 представлена структурная схема замкнутой системы с предиктором Смита. Здесь
𝑃0 (𝑠)𝑒−𝑠ℎ
r
+
e
–
𝑅
— структура обычного ПИД-регулятора,
— передаточная функция объекта управления.
u
R(s)
+
–
y
P0(s)e−sh
+
ε
–
M0(s)e−sh
M0(s)
Рис. 1.3. Система управления с предиктором Смита
Принцип работы системы состоит в следующем. Предположим,
что модель абсолютно точна. Тогда разность сигналов на выходах
модели и объекта будет равна нулю
(𝜀 = 0).
Но в таком случае
непосредственно из схемы на рис. 1.3 можно получить:
𝑦 = 𝑃0 𝑒−𝑠ℎ
(︂
𝑅
1 + 𝑅𝑀0
(︁
В этом выражении член
)︂
𝑃0 𝑅
1+𝑅𝑃0
(︂
𝑟=
)︁
)︂
𝑃0 𝑅 −𝑠ℎ
𝑒
𝑟.
1 + 𝑅𝑃0
(1.1)
представляет собой передаточ-
ную функцию системы без запаздывания. А это значит, что звено
18
Глава 1. Обзор методов. Постановка задачи
с транспортной задержкой не входит в контур обратной связи и
не влияет на устойчивость и быстродействие системы, то есть происходит регулирование в контуре с моделью без запаздывания, а
транспортная задержка прибавляется к полученному результату.
Рассмотрим теперь работу предиктора Смита без предположения
𝜀 = 0.
В этом случае схему на рис. 1.3 можно описать следую-
щими уравнениями:
𝑦 = 𝑃0 𝑒−𝑠ℎ 𝑅 (𝑟 − 𝜀 − 𝑀0 𝑢) 𝑟, 𝜀 = 𝑦 − 𝑀0 𝑒−𝑠ℎ 𝑢, 𝑦 = 𝑃0 𝑒−𝑠ℎ 𝑢,
(1.2)
откуда можно найти
]︂
𝑃0 𝑅
𝑟 𝑒−𝑠ℎ .
𝑦=
1 + 𝑅𝑀0 + 𝑅(𝑃0 − 𝑀0 )𝑒−𝑠ℎ
[︂
Как видим, с ростом точности модели разность
𝑀 0 − 𝑃0
(1.3)
в зна-
менателе стремится к нулю, и из передаточной функции системы
исключается запаздывание, которое только добавляется к результату регулирования (в квадратных скобках в (1.3)).
C помощью топологических преобразований структурных схем
можно получить много эквивалентных между собой структур систем с предиктором Смита. Две из них представлены на рис. 1.4.
Можно показать, что они описываются тем же уравнением (1.3).
Предиктивный пропорционально-интегральный регулятор (сокращенно ППИ-регулятор) является модификацией предиктора
Смита, которая распространена в системах автоматического управления более широко, чем сам предиктор Смита. Один из вариантов
ППИ-регулятора изображен на рисунке 1.5
Наиболее важные работы [40, 55, 63, 71, 73, 83, 88], основанные на
предикторе Смита, используют конечномерные модели и структуры. На ряду с ними стоит выделить адаптивные версии линейных
регуляторов, основанных на предикторе [54, 84], где адаптивный
алгоритм управления разработан даже для неизвестного запаздывания [53]. Более того, существуют различные схемы построения
регуляторов для нелинейных систем [61, 62, 64, 67, 78, 80].
1.1. Методы управления в условиях запаздывания
r
+
e
–
+
–
R(s)
u
19
y
P0(s)e−sh
+
ε
–
M0(s)
e−sh
(а) Модифицированная структура предиктора Смита
r
+
–
e
R(s)
+
–
u
P0(s)e−sh
y
M0(s) − M0(s)e−sh
(б) Модифицированная структура предиктора Смита
Рис. 1.4. Модификации системы управления с предиктором Смита
1.1.2
Предиктор на основе метода М. Крстича
Линейным системам с входным запаздыванием посвящено огромное количество работ. Однако, остаются нерешенными такие задачи как системы с запаздыванием и по входу, и по состоянию, даже
для линейного случая. При такой постановке классический подход
становится неприменимым. Предиктор Смита расчитан только на
асимптотически устойчивые объекты, так как не учитывает свободную составляющую движения системы, обусловленную ненулевыми
начальными условиями.
Обозначенные задачи были решены всемирно известным ученым Мирославом Крстичом с помощью его метода бэкстеппинг
(“backstepping” — обратный обход интегратора, [69]). Также данный метод позволил решить широкий спектр задач управления в
условиях запаздывания, включая нелинейные системы, неустойчивые системы, неизвестное запаздывание, дополнительная динамика в системе, описываемая уравнениями в частных производных
[67, 68, 70]. Под решением задачи понимается аналитическое доказательство (экспоненциальной) устойчивости замкнутой системы.
20
r
Глава 1. Обзор методов. Постановка задачи
+
e
–
K
u
+
+
P0(s)e−sh
y
e−sh
1+sT
Рис. 1.5. Система управления с ППИ-регулятором
Рассмотрим предиктор Крстича на наиболее простой задаче:
стабилизация неустойчивой линейной системы с запаздыванием в
канале управления. Дело в том, что более сложные задачи решаются с помощью этого же подхода с соответствующими модификациями: управление по выходу [90], управление бесконечномерными
объектами, описываемыми уравнениями в частных производных и
другие.
Рассмотрим линейный объект вида
где
˙
𝑋(𝑡)
= 𝐴𝑋(𝑡) + 𝐵𝑈 (𝑡 − 𝐷),
(1.4)
𝑋 ∈ R — вектор состояния, пара (𝐴, 𝐵) полностью управляема,
𝑈 (𝑡) запаздывает на 𝐷 секунд.
и управление
Нетрудно видеть, что для стабилизации системы (1.4) достаточно построить управление в виде
𝑈 (𝑡 − 𝐷) = 𝐾𝑋(𝑡),
где вектор-строка
𝐾
(1.5)
обеспечивает гурвицевость матрицы
𝐴 + 𝐵𝐾 .
Откуда имеем физически не реализуемый алгоритм управления
𝑈 (𝑡) = 𝐾𝑋(𝑡 + 𝐷).
Тем не менее, используя решение для
𝑋(𝑡)
(1.6)
с учетом начальных
условий, получим
∫︁
𝑋(𝑡 + 𝐷) = 𝑒𝐴𝐷 𝑋(𝑡) +
𝑡
𝑒𝐴(𝑡−𝜃) 𝐵𝑈 (𝜃)𝑑𝜃,
𝑡−𝐷
∀𝑡 ≥ 0,
(1.7)
∀𝑡 ≥ 0,
(1.8)
откуда имеем закон управления по состоянию
[︂
∫︁
𝑈 (𝑡) = 𝐾 𝑒𝐴𝐷 𝑋(𝑡) +
𝑡
𝑡−𝐷
𝑒
𝐴(𝑡−𝜃)
]︂
𝐵𝑈 (𝜃)𝑑𝜃 ,
1.1. Методы управления в условиях запаздывания
21
который является реализуемым, хоть и является бесконечномерным, так как содержит член с распределенным запаздыванием
∫︀ 𝑡
𝑡−𝐷
𝑒𝐴(𝑡−𝜃) 𝐵𝑈 (𝜃)𝑑𝜃.
В замкнутом контуре исчезло запаздывание:
˙
𝑋(𝑡)
= (𝐴 + 𝐵𝐾)𝑋(𝑡),
∀𝑡 ≥ 𝐷.
Выражение (1.9) справедливо только после
𝐷
(1.9)
секунд, а до этого
момента состояние объекта изменяется по закону:
𝑡
∫︁
𝐴𝑡
𝑋(𝑡) = 𝑒 𝑋(0) +
0
𝑒𝐴(𝑡−𝜏 ) 𝐵𝑈 (𝜏 − 𝐷)𝑑𝜏. ∀𝑡 ∈ [0, 𝐷].
(1.10)
Закон управления вида (1.8) впервые был получен с позиций
конечно-мерного представления системы [71, 73] и редуцированного
подхода [40]. На первый взгляд, такое интуитивно простое решение
лежит на поверхности, однако вопрос о доказательстве устойчивости замкнутой системы остался без ответа. Проблема заключается в том, что в данном случае не удается применить функционал
Ляпунова-Красовского и доказать устойчивость. Метод Крстича
“backstpping” позволяет это сделать.
Запаздывание может быть представлено в виде уравнения в
частных производных первого порядка
где индексы
𝑥
и
𝑡
𝑢𝑡 (𝑥, 𝑡)
=
𝑢𝑥 (𝑥, 𝑡),
(1.11)
𝑢(𝐷, 𝑡)
=
𝑈 (𝑡),
(1.12)
означают частную производную по соответству-
ющему аргументу. Решение (1.11), (1.12) имеет вид
𝑢(𝑥, 𝑡)
= 𝑈 (𝑡 + 𝑥 − 𝐷),
(1.13)
где выход блока запаздывания
= 𝑈 (𝑡 − 𝐷)
𝑢(0, 𝑡)
(1.14)
определяет запаздывающее управление (рис. 1.6).
Рассмотрим бэкстеппинг преобразование [68]
𝑤(𝑥, 𝑡)
=
𝑢(𝑥, 𝑡) −
∫︁
0
𝑥
𝑞(𝑥, 𝑦)𝑢(𝑦, 𝑡)𝑑𝑦 − 𝛾(𝑥)𝑇 𝑋(𝑡),
(1.15)
22
Глава 1. Обзор методов. Постановка задачи
U (t)
u(D, t)
x
U (t − D)
e−sD
D
u(0, t)
Ẋ(t) = AX(t) + BU (t − D)
X(t)
0
Рис. 1.6. Линейный объект с запаздыванием в канале управления
которое позволяет преобразовать исходную систему (1.4), (1.11)–
(1.14) в устойчивую целевую систему
˙
𝑋(𝑡)
=
(𝐴 + 𝐵𝐾)𝑋(𝑡) + 𝐵𝑤(0, 𝑡),
(1.16)
𝑤𝑡 (𝑥, 𝑡)
=
𝑤𝑥 (𝑥, 𝑡),
(1.17)
𝑤(𝐷, 𝑡)
=
0.
(1.18)
Рассчитывая производные
𝑞(𝑥, 𝑦)
ние для функций
и
𝑤𝑡 (𝑥, 𝑡)
𝛾(𝑥):
𝑤𝑥 (𝑥, 𝑡)
и
𝑞(𝑥, 𝑦) = 𝐾𝑒𝐴(𝑥−𝑦) 𝐵,
Подставляя
𝑞(𝑥, 𝑦)
и
𝛾(𝑥)
нетрудно найти реше-
𝛾(𝑥)𝑇 = 𝐾𝑒𝐴𝑥 .
(1.19)
𝑥 = 𝐷,
имеем закон
𝐾𝑒𝐴(𝐷−𝑦) 𝐵𝑢(𝑦, 𝑡)𝑑𝑦 + 𝐾𝑒𝐴𝐷 𝑋(𝑡).
(1.20)
в (1.15) и выбирая
управления
∫︁
𝑢(𝐷, 𝑡) =
𝐷
0
Как и в редуцированном анализе (1.9) мы получили устойчивую
систему (1.16), но при этом учтены начальные условия системы в
виде возмущения
за
𝐷
𝑤(0, 𝑡). Заметим, что эта функция затухает в ноль
секунд. Для доказательства экспоненциальной устойчивости
системы (1.16) рассматривается функция Ляпунова [70]
𝑉 (𝑡) = 𝑋 𝑇 (𝑡)𝑃 𝑋(𝑡) +
где
𝑃 = 𝑃𝑇 > 0
𝛾
2
∫︁
𝐷
(1 + 𝑥)𝑤(𝑥, 𝑡)2 𝑑𝑥,
(1.21)
0
— решение уравнения Ляпунова
𝑃 (𝐴 + 𝐵𝐾) + (𝐴 + 𝐵𝐾)𝑇 𝑃 = −𝑄
(1.22)
1.2 Обзор методов управления в условиях возмущающих
воздействий
23
𝑄+𝑄𝑇 > {︁
0 и 𝛾 = 4𝜆𝑚𝑎𝑥 (𝑃}︁𝐵𝐵 𝑇 𝑃 )/𝜆𝑚𝑖𝑛 (𝑄),
𝜆𝑚𝑖𝑛 (𝑄)
𝑉˙ (𝑡) ≤ −𝐶𝑉 (𝑡), где 𝐶 = min 2𝜆
, 1 . Таким образом,
𝑚𝑎𝑥 (𝑃 ) 1+𝐷
для некоторой матрицы
дает
система (1.4), (1.8) является экспоненциально устойчивой.
В заключение отметим, что задача стабилизации неустойчивых
систем с запаздыванием и одновременной компенсации возмущения
по мнению автора не решалась ранее. Используя методику Крстича, совместно с ним автору удалось решить эту задачу при допущении измеримости вектора состояния [89] и при измерении только
выходной переменной объекта [90].
1.2
Обзор методов управления в условиях возмущающих воздействий
Задача стабилизации систем с запаздыванием в канале управления
практически не изучена для случая компенсации возмущающих
воздействий. Подобная попытка была предпринята в статье [13],
где рассматривался случай управления параметрически не определенным линейным объектом, подверженным влиянию внешнего
возмущения. Однако авторам не удалось добиться полной компенсации возмущения.
Задача управления в условиях действия возмущения (внешнего паразитного воздействия) является классической проблемой современной теории систем. На сегодняшний день получено большое
число алгоритмов управления при условии действия возмущений
(см., например, обзор методов представленных в монографии [20]).
Большинство известных подходов связано с косвенной параметризацией возмущений, которая в свою очередь, основана на принципе внутренней модели [20, 28]. При этом методы, использующие
принцип внутренней модели, как правило, основываются на гипотезе о возможности представления возмущения как выхода некоторой конечномерной динамической линейной системы. В классической теории управления модель генератора полагается точно известной, что в большинстве случаев является идеализацией. Сегодня случай, когда конечномерная линейная динамическая модель
генератора возмущающего воздействия имеет известные матрицы
ее описания уходит из рассмотрения. Приоритет отдается иссле-
24
Глава 1. Обзор методов. Постановка задачи
дованию генераторов возмущений с матрицами описания, коэффициенты которых заданы не точно или неизвестны (см., например,
работы [20, 52, 59, 74–77, 85–87].
Также можно выделить ряд подходов, основанных на идее
“сильной” обратной связи (см., например, работы [19, 20, 39, 43, 46,
49]). В работе [43] решена задача слежения линейным стационарным объектом за задающим сигналом. Достоинствами этой работы
являются измеримость лишь выходной переменной, а не ее производных или переменных состояния, неопределенность параметров
объекта, а также наличие возмущающих воздействий. Но в этой
работе не рассматривалось запаздывание. Методы, использующие
“сильную” обратную связь не обеспечивают полной компенсации
возмущающего воздействия и, в силу своей особенности (данные
методы предусматривают использование большого коэффициента
обратной связи), могут привести к усилению нежелательных помех
измерения.
Достаточно большое число работ посвящено управлению в условиях действия неизвестного возмущающего воздействия по измерениям только выходной переменной (см., например, [2,3,6–9,20,42,52,
74–77,85–87]). В то же время пользуются популярностью задачи наблюдения и устранения возмущающего воздействия, приложенного
к выходу объекта [3, 4]. Однако, несмотря на большое разнообразие
методов решения и моделей объектов, задача компенсации гармонических возмущающих воздействий с ненулевым смещением для
случая, когда канал управления характеризуется запаздыванием,
не рассматривалась.
Наибольший интерес представляют задачи, где частота возмущения не известна. Однако в большинстве работ, посвященных синтезу алгоритмов идентификации частоты в непрерывном
времени, не обсуждается или отсутствует теоретическое обоснование увеличения быстродействия параметрической сходимости,
что, в свою очередь, также можно отнести к нерешенным задачам идентификации частот периодических сигналов. Рассматриваемый в пособии алгоритм идентификации основыван на работах
[2, 6–10, 25, 38, 41, 42, 91, 93] и имеет динамический порядок, равный
трем из расчета на одну гармонику, что, в свою очередь, улучшает
наиболее известные результаты, опубликованные в [52,59,74–77,96].
Разработанная методика идентификации частоты сигналов име-
1.2. Методы управления в условиях возмущений
25
1 была расширена на задачи иден2
тификации параметров детерминированных хаотических сигналов
ющих гармоническую природу
[39, 45, 47, 92].
В [76, 77, 85–87] рассматриваются минимально-фазовые модели
объектов управления, а в [6–8] — строго минимально-фазовые с единичной относительной степенью. В [8] решена задача компенсации
неизвестного синусоидального возмущения в случае, когда канал
управления характеризуется запаздыванием. В [9] решена задача
компенсации неизвестного синусоидального возмущения для линейного объекта управления любой относительной степени. В [6, 7] решена задача компенсации неизвестного возмущения для параметрически не определенного объекта управления.
В [8, 9] опубликованы результаты по компенсации синусоидального возмущения
𝛿(𝑡) = 𝜎 sin(𝜔𝑡 + 𝜑)
соответственно для строго
минимально-фазового объекта с запаздыванием и объекта без запаздывания, модель которого имеет произвольную относительную
степень. В [8] и [9] для построения регулятора был необходим искусственно реализованный блок запаздывания. В [8] размерность
регулятора составляла
2𝑛 + 3,
где
𝑛
— динамическая размерность
объекта.
В отличие от этих работ в пособии рассматривается метод компенсации возмущения для объектов с запаздыванием и произвольной относительной степенью математической модели (в том числе
и неминимально-фазовых объектов), представленного в виде векторного возмущающего воздействия
𝐻𝑖 cos(𝜔𝑖 𝑡),
где
𝐸 , 𝐺𝑖
и
𝐻𝑖
∆(𝑡) = 𝐸 +
∑︀𝑘
𝑖=1
𝐺𝑖 sin(𝜔𝑖 𝑡) +
𝑛-мерные
— неизвестные постоянные
вектор-столбцы.
В развитие результатов [2, 3, 6–9, 20, 42, 52, 59, 74–77, 85–87, 96]
в пособии изложены алгоритмы компенсации параметрически не
определенного мультигармонического возмущения, действующего
на нелинейный и неустойчивый объект управления, относительная
степень модели которого может быть любой, а канал управления
характеризуется запаздыванием.
1 Сигналы, являющиеся выходом линейных динамических генераторов с
мнимыми корнями характеристического уравнения.
2 Сигналы, являющиеся выходом нелинейных динамических генераторов, которые являются локально неустойчивыми, глобально ограниченными и имееют
странные аттракторы.
26
Глава 1. Обзор методов. Постановка задачи
1.3
Обобщенная постановка задачи
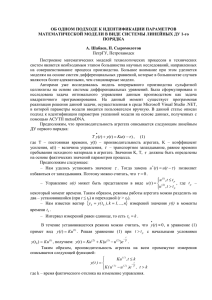
Рассмотрим скалярный нелинейный объект с запаздыванием в канале управления, подверженного воздействию внешних возмущений (см. рис. 1.7):
˙
𝑋(𝑡)
𝑌 (𝑡)
= 𝐴𝑋(𝑡) + 𝐵𝑈 (𝑡 − ℎ) + 𝐹 𝑓 (𝑌 (𝑡)) + ∆(𝑡),
= 𝐶𝑋(𝑡),
(1.23)
(1.24)
𝑋 ∈ R𝑛 — недоступный для измерения вектор переменных состояния, 𝑌 ∈ R — выходная регулируемая переменная, доступная
для измерения, 𝑈 ∈ R — управляющее воздействие, ℎ — известное постоянное запаздывание, 𝑓 (𝑌 ) — известная гладкая нелиней𝑇
ная функция, 𝐴𝑛×𝑛 — матрица состояния, 𝐵 , 𝐶
и 𝐹 — 𝑛-мерные
𝑛
вектор-столбцы, ∆ ∈ R — векторная функция возмущающего возгде
действия вида
∆(𝑡) = 𝐸 +
𝑘
∑︁
𝐺𝑖 sin(𝜔𝑖 𝑡) + 𝐻𝑖 cos(𝜔𝑖 𝑡),
(1.25)
𝑖=1
𝐸 , 𝐺𝑖 и 𝐻𝑖 — неизвестные постоянные 𝑛-мерные
𝜔𝑖 — неизвестная частота 𝑖-ой гармоники. Здесь
символ 𝑖 означает номер гармоники 𝑖 = 1, 𝑘 .
где
вектор-
столбцы,
и далее
∆(t)
U (t)
e−sh
U (t − h)
Объект управления
Y (t)
Рис. 1.7. Объект управления с запаздыванием и возмущением
Рассмотрим допущения относительно системы (1.23),(1.24)
Д о п у щ е н и е 1.1
ляема и наблюдаема.
Тройка матриц 𝐴, 𝐵, 𝐶 полностью управ-
Д о п у щ е н и е 1.2 Частоты возмущающего воздействия не
меньше некоторого известного числа 𝜔0 , т.е. 𝜔𝑖 > 𝜔0 .
Д о п у щ е н и е 1.3
Матрица 𝐴 гурвицева.
1.3 Обобщенная постановка задачи
27
Д о п у щ е н и е 1.4 Функция 𝑓 (𝑌 ) такая, что положение
равновесия 𝑋 = 0 для автономной системы
˙
𝑋(𝑡)
= 𝐴𝑋(𝑡) + 𝐹 𝑓 (𝑌 (𝑡)),
(1.26)
𝑌 (𝑡)
= 𝐶 𝑇 𝑋(𝑡)
(1.27)
является экспоненцииально устойчивым.
З а м е ч а н и е 1.1 Введение допущения 1.4 необходимо для обеспечения ограниченности переменных состояния 𝑋(𝑡) при ненулевых, но ограниченных входных сигналах 𝑈 (𝑡) и ∆(𝑡). В связи с
этим будем рассматривать функцию 𝑓 (𝑌 (𝑡)) в (1.23) как некоторый входной сигнал 𝑓 (𝑡), не влияющий на свойство устойчивости замкнутой системы управления. Отметим тот факт, что
в силу постановки задачи сигнал f(t) доступен для системы управления: его значение в момент времени 𝑡 может быть рассчитано
как известная нелинейная функция от измеряемой функции 𝑌 :
𝑓 (𝑡) = 𝑓 (𝑌 (𝑡)).
Рассмотрим три цели управления.
Цель
у п р а в л е н и я 1 Пусть
мультигармонический сигнал вида
𝑦(𝑡) = 𝜎 +
𝑘
∑︁
доступен
измерению
𝜇𝑖 sin(𝜔𝑖 𝑡 + 𝜑𝑖 ),
(1.28)
𝑖=1
являющийся суммой 𝑘 гармоник с частотами 𝜔𝑖 , амплитудами 𝜇𝑖
и начальными фазами 𝜑𝑖 . Константы 𝜔𝑖 , 𝜇𝑖 и 𝜑𝑖 являются неизвестными.
Требуется синтезировать устройство адаптивной идентификации параметров сигнала 𝑦(𝑡), обеспечивающего для любых
𝜎, 𝜑𝑖 , 𝜇𝑖 и 𝜔𝑖 > 0 выполнения условий
lim𝑡→∞ |𝜔𝑖 − 𝜔
ˆ 𝑖 (𝑡)| = 0,
𝑡→∞
lim |𝜎 − 𝜎
ˆ (𝑡)| = 0,
⃒
⃒
⃒
⃒
lim ⃒𝜑𝑖 − 𝜑ˆ𝑖 (𝑡)⃒ = 0,
lim𝑡→∞ |𝜇𝑖 − 𝜇
ˆ𝑖 (𝑡)| = 0,
𝑡→∞
(1.29)
где 𝜔
ˆ (𝑡) — текущая оценка частоты 𝜔 , 𝜎
ˆ (𝑡) — текущая оценка
ˆ
смещения 𝜎 , 𝜇
ˆ(𝑡) — текущая оценка амплитуды 𝜇, 𝜑(𝑡)
— текущая оценка фазового сдвига 𝜑.
Этой цели посвящена глава 2.
28
Глава 1. Обзор методов. Постановка задачи
Цель
у п р а в л е н и я 2 Пусть
выполнены допущения
1.1–1.4 относительно системы (1.23), (1.24).
Требуется синтезировать закон управления 𝑈 (𝑡) по выходу,
обеспечивающий ограниченность всех траекторий системы и сходимость выходной переменной к нулю:
lim 𝑌 (𝑡) = 0.
𝑡→∞
(1.30)
Этой цели посвящена глава 3.
Цель
у п р а в л е н и я 3 Пусть 𝑓 (𝑌 ) = 0, и выполнены допущения 1.1, 1.2 относительно системы (1.23), (1.24). Матрица
𝐴 может быть негурвицевой.
Требуется синтезировать закон управления 𝑈 (𝑡) по выходу,
обеспечивающий ограниченность всех траекторий системы и сходимость выходной переменной к нулю:
lim 𝑌 (𝑡) = 0.
𝑡→∞
Этой цели посвящена глава 4.
(1.31)
Глава 2
Методы построения адаптивных
наблюдателей
мультигармонических сигналов
Данная глава посвящена методу построения адаптивного наблюдателя и идентификации параметров мультигармонического
сигнала, включая общее смещение, частоту и амплитуду каждой
гармоники. Такая проблема возникает при решении задачи компенсации параметрически не определенного возмущения, имеющего квазигармоническую структуру, и требует рассмотрения в рамках отдельной главы, где представлен анализ алгоритма идентификации параметров мультигармонического сигнала, доступного для
измерения.
Наибольший интерес представляют задачи, где частота или частоты мультигармонического сигнала не известны. Однако, в большинстве работ, посвященных синтезу алгоритмов идентификации
частоты в непрерывном времени, не обсуждается или отсутствует
теоретическое обоснование увеличения быстродействия параметрической сходимости, что, в свою очередь, также можно отнести к
нерешенным задачам идентификации частот периодических сигналов. Предлагаемый в данной главе алгоритм идентификации имеет
динамический порядок, равный
3𝑘 ,
где
𝑘
— число гармоник, что, в
свою очередь, улучшает наиболее известные результаты, опубликованные в [52, 59, 74–77, 96].
Алгоритм обладает адаптивными свойствами по отношению к
изменению параметров сигнала и робастными свойствами по отношению к нерегулярным составляющим сигнала. Изменяя парамет-
30
Глава 2. Наблюдение мультигармонических сигналов
ры алгоритма идентификации можно управлять скоростью сходимости оценок к их истинным значениям.
Рассмотренный алгоритм идентификации обеспечивает экспоненциальную сходимость к нулю ошибки оценивания частоты смещенного синусоидального сигнала. Алгоритм идентификации параметров смещенного синусоидального сигнала обобщен на случай
мультигармонической функции времени.
2.1
Алгоритм
адаптивной
идентифика-
ции параметров смещенного синусоидального сигнала
2.1.1
Постановка задачи
Рассматривается измеряемый сигнал вида
𝑦(𝑡) = 𝜎 + 𝜇 sin(𝜔𝑡 + 𝜑),
содержащий постоянную составляющую
ляющую с частотой
станты
𝜎, 𝜔, 𝜇
и
𝜑
𝜔,
амплитудой
𝜇
(2.1)
𝜎 и гармоническую состав𝜑. Кон-
и фазовым сдвигом
являются неизвестными.
Д о п у щ е н и е 2.1 Частота гармонической составляющей
сигнала 𝑦(𝑡) не меньше некоторого известного числа 𝜔0 , т.е.
𝜔 > 𝜔0 .
Д о п у щ е н и е 2.2 Считается, что значение времени 𝑡 с
момента запуска алгоритма известно.
Сформулируем цель управления как решение задачи синтеза алгоритма идентификации, обеспечивающего для любых
𝜎, 𝜑, 𝜇 и 𝜔 > 0
выполнения условий
lim |𝜔 − 𝜔
ˆ (𝑡)| = 0,
(2.2)
lim |𝜎 − 𝜎
ˆ (𝑡)| = 0,
(2.3)
lim |𝜇 − 𝜇
ˆ(𝑡)| = 0,
⃒
⃒
⃒
ˆ ⃒⃒ = 0,
lim ⃒𝜑 − 𝜑(𝑡)
(2.4)
𝑡→∞
𝑡→∞
𝑡→∞
𝑡→∞
(2.5)
2.1. Смещенный синусоидальный сигнал
31
𝜔
ˆ (𝑡) — текущая оценка частоты 𝜔 , 𝜎
ˆ (𝑡) — текущая оценка смещеˆ — текущая оценка
𝜎, 𝜇
ˆ(𝑡) — текущая оценка амплитуды 𝜇, 𝜑(𝑡)
фазового сдвига 𝜑.
где
ния
2.1.2
Алгоритм идентификации частоты смещенного гармонического сигнала
Известно [2, 25, 89, 90], что для генерирования сигнала (2.1) можно
использовать дифференциальное уравнение вида
...
𝑦 (𝑡) = −𝜃𝑦(𝑡),
˙
(2.6)
𝜃 = −𝜔 2 .
(2.7)
где
Следуя результатам [8, 9, 25, 89, 90], представим следующую лемму.
Л е м м а 2.1
Для линейного фильтра второго порядка
𝜉(𝑠)
и для сигнала
(2.1)
=
𝜆2
𝑦(𝑠), 𝜆 > 0,
(𝑠 + 𝜆)2
(2.8)
справедливо следующее выражение:
...
𝜉 (𝑡)
=
˙ + 𝜀(𝑡),
𝜃𝜉(𝑡)
(2.9)
...
˙ и 𝜉 (𝑡) — переменные состояния линейного фильгде функции 𝜉(𝑡)
тра (2.8)
˙
𝜉(𝑠)
...
𝜉 (𝑠)
=
=
𝜆2 𝑠
𝑦(𝑠),
(𝑠 + 𝜆)2
𝜆2 𝑠3
𝑦(𝑠),
(𝑠 + 𝜆)2
(2.10)
(2.11)
и 𝜀(𝑡) — экспоненциально затухающая функция.
Доказательство
л е м м ы 2.1. Выполняя преобразование
Лапласа для (2.6), имеем
𝑠3 𝑦(𝑠) = 𝜃𝑠𝑦(𝑠) + 𝑄(𝑠),
(2.12)
32
где
Глава 2. Наблюдение мультигармонических сигналов
𝑠
— комплексная переменная,
переменной
𝑦(𝑡),
а полином
𝑄(𝑠)
𝑦(𝑠) = ℒ {𝑦(𝑡)}
— образ Лапласа
обозначает сумму всех начальных
условий. Умножая обе части (2.12) на комплексное число
𝜆2
(𝑠+𝜆)2 ,
получим
𝑠3
𝜆2
𝑦(𝑠)
(𝑠 + 𝜆)2
= 𝜃𝑠
𝜆2
𝜆2 𝑄(𝑠)
𝑦(𝑠)
+
.
(𝑠 + 𝜆)2
(𝑠 + 𝜆)2
(2.13)
Выполняя обратное преобразование Лапласа для (2.13) с учетом
(2.8), имеем
...
где
𝜀(𝑡) = ℒ−1
{︁
𝜆2 𝑄(𝑠)
(𝑠+𝜆)2
𝜉 (𝑡)
}︁
=
˙ + 𝜀(𝑡),
𝜃𝜉(𝑡)
(2.14)
— экспоненциально затухающая функция
с экспоненциально затухающими производными, что и требовалось
доказать.
З а м е ч а н и е 2.1 Поскольку {︁ экспоненциально
затухающая
}︁
2
𝑄(𝑠)
зависит
от
параметфункция времени 𝜀(𝑡) = ℒ−1 𝜆(𝑠+𝜆)
2
ра 𝜆, то с увеличением значения 𝜆 можно ускорять процесс
сходимости 𝜀(𝑡) к нулю.
В следующей теореме представлен адаптивный алгоритм идентификации частоты
𝜔
сигнала (2.1), основанный на подходах [8, 9,
25, 89, 90].
Т е о р е м а 2.1
Алгоритм адаптации вида
√︂⃒
⃒
⃒ˆ ⃒
𝜔
ˆ (𝑡) =
⃒𝜃(𝑡)⃒,
ˆ
𝜃(𝑡)
˙ 𝜉(𝑡),
¨
= 𝜒(𝑡) + 𝑘 𝜉(𝑡)
ˆ − 𝑘 𝜉¨2 (𝑡),
𝜒(𝑡)
˙
= −𝑘 𝜉˙2 (𝑡)𝜃(𝑡)
(2.15)
(2.16)
(2.17)
˙ и 𝜉(𝑡)
¨ определены в лемме 2.1, обеспегде 𝑘 > 0, функции 𝜉(𝑡), 𝜉(𝑡)
чивает экспоненциальную сходимость к нулю ошибки оценивания
𝜔
˜ (𝑡) = 𝜔 − 𝜔
ˆ (𝑡):
|˜
𝜔 (𝑡)| 6 𝜌𝑒−𝛽𝑡 ,
где 𝜌 и 𝛽 — положительные числа.
∀𝑡 > 0,
(2.18)
2.1. Смещенный синусоидальный сигнал
33
Д о к а з а т е л ь с т в о т е о р е м ы 2.1. Рассмотрим модель ошибки оценивания с учетом леммы 2.1
˜˙
𝜃(𝑡)
=
=
=
=
=
ˆ˙
𝜃˙ − 𝜃(𝑡)
...
˙ 𝜉 (𝑡)
−𝜒(𝑡)
˙ − 𝑘 𝜉¨2 (𝑡) − 𝑘 𝜉(𝑡)
...
ˆ + 𝑘 𝜉¨2 (𝑡) − 𝑘 𝜉¨2 (𝑡) − 𝑘 𝜉(𝑡)
˙ 𝜉 (𝑡)
𝑘 𝜉˙2 (𝑡)𝜃(𝑡)
ˆ − 𝑘 𝜉˙2 (𝑡)𝜃 − 𝑘 𝜉(𝑡)𝜀(𝑡)
˙
𝑘 𝜉˙2 (𝑡)𝜃(𝑡)
˜ − 𝑘 𝜉(𝑡)𝜀(𝑡).
˙
−𝑘 𝜉˙2 (𝑡)𝜃(𝑡)
(2.19)
Рассмотрим функцию Ляпунова [25, 89, 90]
𝑉 (𝑡) =
где
𝑓 (𝑡)
1
𝑓 (𝑡)𝜃˜2 (𝑡),
2
— положительная функция, ограниченная сверху и снизу
0 < 𝐶1 6 𝑓 (𝑡) 6 𝐶2 < ∞,
где
𝐶1
(2.20)
и
𝐶2
(2.21)
— константы, которые будут определены далее при
анализе. Дифференцируя (2.20), имеем
𝑉˙ (𝑡)
=
=
6
=
1 ˙ ˜2
˜ 𝜃(𝑡)
˜˙
𝑓 (𝑡)𝜃 (𝑡) + 𝑓 (𝑡)𝜃(𝑡)
2
1 ˙ ˜2
˙ 𝜃(𝑡)𝜀(𝑡)
˜
𝑓 (𝑡)𝜃 (𝑡) − 𝑘𝑓 (𝑡)𝜉˙2 (𝑡)𝜃˜2 (𝑡) − 𝑘𝑓 (𝑡)𝜉(𝑡)
2
(︁
)︁
1
1 ˙ ˜2
𝑓 (𝑡)𝜃 (𝑡) − 𝑘𝑓 (𝑡)𝜉˙2 (𝑡)𝜃˜2 (𝑡) + 𝑘𝑓 (𝑡) 𝜉˙2 (𝑡)𝜃˜2 (𝑡) + 𝜀2 (𝑡)
2
2
1 ˙ ˜2
1
1
2
2
˙
˜
𝑓 (𝑡)𝜃 (𝑡) − 𝑘𝑓 (𝑡)𝜉 (𝑡)𝜃 (𝑡) + 𝑘𝑓 (𝑡)𝜀2 (𝑡).
(2.22)
2
2
2
Из (2.40) получим
˙
𝜉(𝑡)
где
= 𝜇𝜉 𝜔 cos(𝜔𝑡 + 𝜑𝜉 ) + 𝜖1 (𝑡),
𝜖1 (𝑡) , 𝜀˙𝜉 (𝑡), |𝜖1 (𝑡)| 6 𝜌1 𝑒−𝛽1 𝑡
(2.23)
— экспоненциально затухающая
функция времени. Откуда
𝜉˙2 (𝑡)
𝜇2𝜉 𝜔 2 cos2 (𝜔𝑡 + 𝜑𝜉 ) + 2𝜇𝜉 𝜔 cos(𝜔𝑡 + 𝜑𝜉 )𝜖1 (𝑡) + 𝜖21 (𝑡)
1 2 2 1 2 2
=
𝜇 𝜔 + 𝜇𝜉 𝜔 cos(2𝜔𝑡 + 2𝜑𝜉 ) + 2𝜇𝜉 𝜔 cos(𝜔𝑡 + 𝜑𝜉 )𝜖1 (𝑡)
2 𝜉
2
+𝜖21 (𝑡).
(2.24)
=
34
Глава 2. Наблюдение мультигармонических сигналов
Подставляя (2.24) в (2.22), имеем
1 ˙ ˜2
1
1
1
1
𝑓 (𝑡)𝜃 (𝑡) − 𝑘𝜇2𝜉 𝜔 2 𝑓 (𝑡)𝜃˜2 (𝑡) + 𝑘𝑓 (𝑡)𝜀2 (𝑡) − 𝑘𝑓 (𝑡)𝜃˜2 (𝑡)
2 (︂
2
2
2
2
1 2 2
×
𝜇 𝜔 cos(2𝜔𝑡 + 2𝜑𝜉 ) + 2𝜇𝜉 𝜔 cos(𝜔𝑡 + 𝜑𝜉 )𝜖1 (𝑡)
2 𝜉
)︀
+𝜖21 (𝑡) .
(2.25)
𝑉˙ (𝑡) 6
Выберем функцию
𝑓˙(𝑡)
𝑓 (𝑡)
так, что
(︂
=
1 2 2
𝜇 𝜔 cos(2𝜔𝑡 + 2𝜑𝜉 ) + 2𝜇𝜉 𝜔 cos(𝜔𝑡 + 𝜑𝜉 )𝜖1 (𝑡)
2 𝜉
)︀
+𝜖21 (𝑡) .
(2.26)
𝑘𝑓 (𝑡)
Достаточно воспользоваться частным решением (2.26) в виде
= 𝑒𝑔(𝑡) ,
(2.27)
∫︁ 𝑡 (︂
1 2 2
𝜇 𝜔 cos(2𝜔𝜏 + 2𝜑𝜉 ) + 2𝜇𝜉 𝜔 cos(𝜔𝜏 + 𝜑𝜉 )𝜖1 (𝜏 )
𝑔(𝑡) = 𝑘
2 𝜉
0
)︀
+𝜖21 (𝜏 ) 𝑑𝜏.
(2.28)
𝑓 (𝑡)
Рассмотрим функцию
𝑓 (𝑡)
𝑔(𝑡)
для того, чтобы найти ограничения для
сверху и снизу.
𝑔(𝑡)
=
1 2
𝑘𝜇 𝜔(sin(2𝜔𝑡 + 2𝜑𝜉 ) − sin(2𝜑𝜉 ))
2 𝜉
∫︁ 𝑡
(︀
)︀
+2𝑘
𝜇𝜉 𝜔 cos(𝜔𝜏 + 𝜑𝜉 )𝜖1 (𝜏 ) + 𝜖21 (𝜏 ) 𝑑𝜏,
(2.29)
0
∫︁ 𝑡
∫︁ 𝑡
1 2
|𝑔(𝑡)| 6
𝑘𝜇 𝜔 (1 − sin(2𝜑𝜉 )) + 2𝑘𝜇𝜉 𝜔
|𝜖1 (𝜏 )| 𝑑𝜏 + 2𝑘
𝜖21 (𝜏 )𝑑𝜏
2 𝜉
0
0
∫︁ 𝑡
∫︁ 𝑡
2
−𝛽1 𝑡
2
6 𝑘𝜇𝜉 𝜔 + 2𝑘𝜇𝜉 𝜔𝜌1
𝑒
𝑑𝜏 + 2𝑘𝜌1
𝑒−2𝛽1 𝑡 𝑑𝜏
0
0
)︀
)︀
𝜌1 (︀
𝜌2 (︀
= 𝑘𝜇2𝜉 𝜔 + 2𝑘𝜇𝜉 𝜔
1 − 𝑒−𝛽1 𝑡 + 2𝑘 1 1 − 𝑒−2𝛽1 𝑡
𝛽1
2𝛽1
2𝑘𝜇𝜉 𝜔𝜌1
𝑘𝜌2
6 𝑘𝜇2𝜉 𝜔 +
+ 1
𝛽1
𝛽1
= 𝐶3 < ∞,
(2.30)
2.1. Смещенный синусоидальный сигнал
где
𝜌1
и
𝛽1
— положительные числа,
𝐶3
35
— неотрицательная кон-
станта.
На основе неравенства
искомые границы
𝑓 (𝑡)
− |𝑔(𝑡)| 6 𝑔(𝑡) 6 |𝑔(𝑡)|
𝐶1 = 𝑒−𝐶3
в виде (2.21), где
легко получить
и
𝐶 2 = 𝑒𝐶 3 .
Подстановка (2.26) в (2.25) дает
1
1
1
𝑉˙ (𝑡) 6 − 𝑘𝜇2𝜉 𝜔 2 𝑓 (𝑡)𝜃˜2 (𝑡) + 𝑘𝑓 (𝑡)𝜀2 (𝑡)
2
2
2
6 −𝐶4 𝑉 (𝑡) + 𝐶5 𝑒−𝛽2 𝑡 ,
(2.31)
где
𝐶4 =
1 2 2
1
𝑘𝜇𝜉 𝜔 , 𝐶5 = 𝑘𝐶2 𝜌2 ,
2
2
𝜖2 (𝑡) = 𝜀2 (𝑡) — экспоненциально затухающая
𝜌2 𝑒−𝛽2 𝑡 , а 𝜌2 и 𝛽2 — положительные числа.
функция,
|𝜖2 (𝑡)| 6
Используя принцип сравнения [65] для (2.31), получим
𝑉 (𝑡) 6 𝑉 (0)𝑒−𝐶4 𝑡 + 𝐶5 𝑒−𝐶4 𝑡
∫︁
𝑡
𝑒(𝐶4 −𝛽2 )𝜏 𝑑𝜏.
(2.32)
0
Если
𝛽 2 = 𝐶4 ,
то можно выбрать
𝛽2
из условия
0 < 𝛽2 < 𝐶4 , не
𝜖2 (𝑡). Так
нарушив экспоненциально затухающего вида функции
или иначе, из (2.32) можно получить
𝑉 (𝑡) 6
6
где
𝑉 (0)𝑒−𝐶4 𝑡 +
𝜌3 𝑒−𝛽3 𝑡 ,
)︀
𝐶5 (︀ −𝛽2 𝑡
𝑒
− 𝑒−𝐶4 𝑡
𝐶4 − 𝛽2
(2.33)
⃒
⃒
⃒ 5 ⃒
𝜌3 = 𝑉 (0) + ⃒ 𝐶4𝐶−𝛽
⃒ и 𝛽3 = min {𝐶4 , 𝛽2 }. Из (2.20), (2.21) и (2.33)
2
получим
˜
𝜃(𝑡)
6
√︂
2 √︀
𝑉 (𝑡) 6
𝐶1
√︂
2𝜌3 − 1 𝛽3 𝑡
𝑒 2 .
𝐶1
Покажем, что ошибка оценивания частоты
(2.34)
𝜔
˜ (𝑡) = 𝜔 − 𝜔
ˆ (𝑡)
в
36
Глава 2. Наблюдение мультигармонических сигналов
алгоритме (2.15) экспоненциально затухает:
𝜔
˜ (𝑡)
=
√︀
√︂⃒
⃒
⃒ˆ ⃒
|𝜃| − ⃒𝜃(𝑡)
⃒
√︂⃒
⃒ √︂⃒
⃒
⃒˜
ˆ ⃒⃒ − ⃒⃒𝜃(𝑡)
ˆ ⃒⃒
⃒𝜃(𝑡) + 𝜃(𝑡)
√︂⃒
⃒ √︂⃒
⃒ √︂⃒
⃒
⃒˜ ⃒
⃒ˆ ⃒
⃒ˆ ⃒
6
⃒𝜃(𝑡)⃒ + ⃒𝜃(𝑡)
⃒ − ⃒𝜃(𝑡)
⃒
√︂⃒
⃒
⃒˜ ⃒
6
⃒𝜃(𝑡)⃒.
=
√︂⃒
⃒
⃒
˜ ⃒⃒
𝜔
˜ (𝑡) =
|𝜃| − ⃒𝜃 − 𝜃(𝑡)
√︂⃒
⃒
√︀
√︀
⃒˜ ⃒
>
|𝜃| − |𝜃| − ⃒𝜃(𝑡)
⃒
√︂⃒
⃒
⃒˜ ⃒
> − ⃒𝜃(𝑡)
⃒.
(2.35)
√︀
(2.36)
Из (2.35) и (2.36) нетрудно видеть, что
√︂⃒
⃒
⃒˜ ⃒
|˜
𝜔 (𝑡)| 6
⃒𝜃(𝑡)⃒ 6 𝜌 𝑒−𝛽𝑡 .
(2.37)
Мы получили соотношение для ошибки оценивания (2.18), где
𝜌=
√︁
4
2𝜌3
𝐶1 и
𝛽 = 14 𝛽3 .
Таким образом, адаптивный идентификатор
частоты (2.15)–(2.17) обеспечивает экспоненциальную сходимость к
нулю ошибки оценивания
𝜔
˜ (𝑡).
Теорема 2.1 доказана.
З а м е ч а н и е 2.2 Показатель экспоненты в (2.37) зависит
только от параметров 𝜆 и 𝑘 : 𝛽 = 𝛽(𝜆, 𝑘). При увеличении 𝜆 и
𝑘 увеличивается значение 𝛽 . Следовательно, управляя значениями параметров алгоритма идентификации 𝜆 и 𝑘 можно регулировать скорость сходимости ошибки оценивания 𝜔
˜ (𝑡) к нулю. При
устремлении 𝜆 и 𝑘 к бесконечности время переходного процесса
при идентификации частоты стремится к нулю.
З а м е ч а н и е 2.3 Выражение (2.37) показывает, что модуль
ошибки оценивания ограничен затухающей экспонентой. При рассмотрении аддитивной нерегулярной ограниченной составляющей
2.1. Смещенный синусоидальный сигнал
𝛿0 (𝑡) ∈ 𝐿∞ в сигнале
37
(2.1)
𝑦(𝑡) = 𝜎 + 𝜇 sin(𝜔𝑡 + 𝜑) + 𝛿0 (𝑡),
(2.38)
легко показать, что ошибка оценивания частоты будет ограниченна константой, зависящей от амплитуды аддитивной компоненты
|˜
𝜔 (𝑡)| ≤ 𝜌1 𝑒−𝛽1 𝑡 + 𝐶𝜔 ,
(2.39)
где 𝐶𝜔 — положительная константа, зависящая от амплитуды аддитивной компоненты 𝛿0 (𝑡). Это говорит о робастных свойствах алгоритма идентификации (2.15)–(2.17) частоты по отношению к нерегулярной составляющей возмущения.
2.1.3
Алгоритм
идентификации
смещения,
ам-
плитуды и фазы
В этом подразделе будет представлен алгоритм идентификации
смещения, амплитуды и фазы смещенного гармонического сигнала
на основе оценки частоты
янного смещения
𝜎
𝜔
ˆ (𝑡). Сигнал (2.1) является суммой посто𝛿(𝑡) = 𝜇 sin(𝜔𝑡 + 𝜑).
и гармонической функции
Так как фильтр (2.8) линейный, то реакция на гармоническое
воздействие будет также гармонической функцией с той же частотой. Аналогично для постоянного воздействия. Так как полином
(𝑠 + 𝜆)2
гурвицев, то для входного сигнала (2.1) выходная перемен-
ная фильтра (2.8) имеет вид
𝜉(𝑡)
где
𝜎𝜉
— смещение,
= 𝜎𝜉 + 𝜇𝜉 sin(𝜔𝑡 + 𝜑𝜉 ) + 𝜀𝜉 (𝑡),
𝜇𝜉
— амплитуда,
𝜑𝜉
— фазовый сдвиг и
(2.40)
𝜀𝜉 (𝑡)
—
экспоненциально затухающая функция с экспоненциально затухающими производными.
Следуя результатам [9, 22, 25, 89, 90], имеем
]︂
[︂
]︂
𝜆2
𝜆2
𝜉(𝑡) =
𝜎+
𝛿(𝑡)
(𝑝 + 𝜆)2
(𝑝 + 𝜆)2
= 𝜉1 (𝑡) + 𝜉2 (𝑡) + 𝜀𝜉 (𝑡),
[︂
𝜉1 (𝑡)
𝜉2 (𝑡)
(2.41)
=
𝜎,
(2.42)
=
(︁
𝜙𝜉 )︁
,
𝐿𝜉 𝛿 𝑡 +
𝜔
(2.43)
38
Глава 2. Наблюдение мультигармонических сигналов
⃒
⃒
⃒ 𝜆2 ⃒
𝑝 = 𝑑/𝑑𝑡 — оператор дифференцирования, ⃒ (𝑗𝜔+𝜆)
2⃒
= 1 — поло𝜔=0
жительный передаточный
коэффициент для постоянного входного
⃒
⃒
сигнала,
⃒ 𝜆2 ⃒
𝐿𝜉 = ⃒ (𝑗𝜔+𝜆)
2⃒
и
𝜙𝜉 = arg
𝜆2
(𝑗𝜔+𝜆)2 — положительный пере-
даточный коэффициент и фазовый сдвиг для гармонического вход-
√
𝜔 , действующего на фильтр (2.8), 𝑗 = −1
𝜀𝜉 (𝑡) — экспоненциально затухающая функ-
ного сигнала с частотой
— комплексное число,
ция.
В следующей лемме представлены наблюдатели переменных
𝜉1 (𝑡), 𝜉2 (𝑡)
и
𝜉˙2 (𝑡).
Л е м м а 2.2
ского сигнала
Наблюдатель компонент смещенного гармоничеявляющегося выходной переменной фильтра
(2.41),
(2.8)
𝜉ˆ1 (𝑡)
= 𝜉(𝑡) − 𝜉ˆ2 (𝑡),
¨
𝜉(𝑡)
𝜉ˆ2 (𝑡) = − 2 ,
𝜂 (𝑡)
{︃
𝜔
ˆ (𝑡) для 𝜔
ˆ (𝑡) > 𝜔0 ,
𝜂(𝑡) =
𝜔0
иначе,
𝜉ˆ3 (𝑡)
˙
= 𝜉(𝑡),
(2.44)
(2.45)
(2.46)
(2.47)
где 𝜔0 — известная нижняя граница частоты 𝜔 , а функции 𝜉(𝑡),
˙ и 𝜉(𝑡)
¨ определены в лемме 2.1, обеспечивает экспоненциальную
𝜉(𝑡)
сходимость к нулю ошибок наблюдения 𝜉˜1 = 𝜉1 − 𝜉ˆ1 , 𝜉˜2 = 𝜉2 − 𝜉ˆ2 и
𝜉˜3 = 𝜉˙2 − 𝜉ˆ3 .
Доказательство
л е м м ы 2.2. Дифференцируя (2.41) два
раза, имеем:
˙ = 𝜉˙1 (𝑡) + 𝜉˙2 (𝑡) = 𝜉˙2 (𝑡) + 𝜀 ˙ (𝑡),
𝜉(𝑡)
𝜉
(2.48)
¨ = 𝜉¨2 (𝑡) + 𝜖˙3 (𝑡) = −𝜔 𝜉2 (𝑡) + 𝜀 ¨,
𝜉(𝑡)
𝜉
(2.49)
2
где
𝜀𝜉˙
и
𝜀𝜉¨ —
экспоненциально затухающие функции. Откуда
¨
𝜀𝜉¨(𝑡)
𝜉(𝑡)
+ 2 ,
𝜔2
𝜔
˙𝜉2 (𝑡) = 𝜉(𝑡)
˙ − 𝜀 ˙ (𝑡).
𝜉
𝜉2 (𝑡) = −
(2.50)
(2.51)
2.1. Смещенный синусоидальный сигнал
39
Следовательно,
𝜉˜2 (𝑡)
¨
¨
𝜀𝜉¨(𝑡)
𝜉(𝑡)
𝜉(𝑡)
= 𝜉2 (𝑡) − 𝜉ˆ2 (𝑡) = − 2 + 2 + 2 .
𝜔
𝜔
𝜂 (𝑡)
Так как функция
¨
𝜉(𝑡)
(2.44) имеем
𝜔
ˆ (𝑡)
𝜉˜2 (𝑡)
также ограничена. Из
𝜔 , та𝜉˜2 (𝑡) экспоненциально стремится к нулю. Из (2.41),
𝜉˜1 = −𝜉˜2 − 𝜀𝜉 , откуда следует, что 𝜉˜1 (𝑡) ограничена
теоремы 2.1 следует, что
ким образом,
ограничена,
(2.52)
экспоненциально стремится к
и экспоненциально стремится к нулю. Из (2.45) и (2.48) получим
𝜉˜3 = −𝜀𝜉˙ ,
следовательно, лемма 2.2 доказана.
Располагая оценками компонент выходной переменной фильтра
(2.8), нетрудно оценить искомые параметры смещенного гармонического сигнала (2.1). Заметим, что в силу (2.42) переменная
является оценкой смещения
𝜎.
𝜉ˆ1 (𝑡)
В следующем утверждении пред-
ставлен алгоритм идентификации амплитуды
𝜇
и фазы
𝜑
сигнала
𝑦(𝑡).
У т в е р ж д е н и е 2.1
и фазы 𝜑 вида
Алгоритм идентификации амплитуды 𝜇
(︁
)︁
𝜇
ˆ𝜉 (𝑡)
ˆ = −𝜙ˆ𝜉 (𝑡) + 𝜑ˆ𝜉 (𝑡) mod 2𝜋,
, 𝜑(𝑡)
ˆ 𝜉 (𝑡)
𝐿
⎯
(︃
)︃2
⎸
⎸
ˆ
𝜉
(𝑡)
3
𝜇
ˆ𝜉 (𝑡) = ⎷𝜉ˆ22 (𝑡) +
,
𝜂(𝑡)
(︃
(︃
)︃
)︃
(︁
)︁
ˆ3 (𝑡)
𝜉
𝜑ˆ𝜉 (𝑡) = sign 𝜉ˆ2 (𝑡) arccos
−𝜔
ˆ (𝑡)𝑡 mod 2𝜋,
𝜇
ˆ𝜉 (𝑡)𝜂(𝑡)
(︂ 2
)︂
𝜆 −𝜔
ˆ 2 (𝑡)
𝜆2
ˆ 𝜉 (𝑡) =
,
𝜙
ˆ
(𝑡)
=
−
arccos
𝐿
𝜉
𝜆2 + 𝜔
ˆ 2 (𝑡)
𝜆2 + 𝜔
ˆ 2 (𝑡)
𝜇
ˆ(𝑡) =
(2.53)
(2.54)
(2.55)
(2.56)
обеспечивает ограниченность и экспоненциальную сходимость к
нулю ошибок оценивания 𝜇
˜ = 𝜇−𝜇
ˆ и 𝜑˜ = 𝜑 − 𝜑ˆ, где оценка частоты 𝜔
ˆ (𝑡) определяется адаптивным алгоритмом идентификации
ˆ1 (𝑡), 𝜉ˆ2 (𝑡), 𝜉ˆ3 (𝑡) и 𝜂(𝑡) определены в лемме
(2.15)–(2.17), функции 𝜉
2.2. Переменные 𝜇
ˆ𝜉 и 𝜑ˆ𝜉 являются оценками 𝜇𝜉 и 𝜑𝜉 в (2.40) соотˆ
ветственно, а 𝐿𝜉 и 𝜙ˆ𝜉 являются оценками 𝐿𝜉 и 𝜙𝜉 соответствен-
40
Глава 2. Наблюдение мультигармонических сигналов
но. Дополнительные переменные вводятся для упрощения доказательства утверждения.
Доказательство
у т в е р ж д е н и я 2.1. Из (2.43) следует,
что
𝜉2 (𝑡) = 𝐿𝜉 𝜇 sin(𝜔𝑡 + 𝜑 + 𝜙𝜉 ),
(2.57)
откуда имеем соотношения
𝜇𝜉 = 𝐿𝜉 𝜇,
Для определения
и
𝜑𝜉 = 𝜑 + 𝜙𝜉 .
(2.58)
𝜇 и 𝜑 предварительно найдем значения 𝜇𝜉 , 𝜑𝜉 , 𝐿𝜉
𝜙𝜉
𝜉2 (𝑡),
Дифференцируя
имеем
𝜉˙2 (𝑡) = 𝜇𝜉 𝜔 cos(𝜔𝑡 + 𝜑𝜉 ).
(2.59)
Легко показать, что
⎯
)︃2
(︃
⎸
⎸
⎷𝜉 2 (𝑡) + 𝜉˙2 (𝑡)
= 𝜇𝜉 (𝑡).
2
𝜔
(2.60)
В самом деле
⎯
(︃
)︃2
⎸
⎸
˙
𝜉
(𝑡)
2
⎷𝜉 2 (𝑡) +
2
𝜔
=
√︁
𝜇2𝜉 sin2 (𝜔𝑡 + 𝜑𝜉 ) + 𝜇2𝜉 cos2 (𝜔𝑡 + 𝜑𝜉 )
= 𝜇𝜉 (𝑡),
(2.61)
где использовано основное тригонометрическое тождество
sin2 (𝜔𝑡+
2
𝜑𝜉 ) + cos (𝜔𝑡 + 𝜑𝜉 ) = 1.
Далее определим значение фазы
𝜑𝜉 , выразив эту переменную из
системы уравнений
{︂
𝜉2 (𝑡) = 𝜇𝜉 sin(𝜔𝑡 + 𝜑𝜉 ),
𝜉˙2 (𝑡) = 𝜇𝜉 𝜔 cos(𝜔𝑡 + 𝜑𝜉 ).
(2.62)
Значение функций arcsin(·) и arccos(·) изменяются в диапазоне
𝜋,
в то время как реальное значение фазовой переменной функции
2.1. Смещенный синусоидальный сигнал
sin(·)
2𝜋 . Будем рассматри(𝜔𝑡+𝜑𝜉 ) по модулю 2𝜋 и искать решение
на интервале (−𝜋; 𝜋]. Если функция sin(·) отрицательна, значит фазовую переменную следует определять на интервале (−𝜋; 0), иначе
на интервале [0; 𝜋]. Из системы (2.62) с учетом предыдущих расили
cos(·)
41
может меняться в пределах
вать фазовую переменную
суждений имеем
(︃
𝜉˙2 (𝑡)
𝜇𝜉 𝜔
𝜔𝑡 + 𝜑𝜉 = sign (𝜉2 (𝑡)) arccos
Так как значение времени
делении
𝜑𝜉
𝑡
)︃
.
(2.63)
растет неограниченно, то при опре-
на основе (2.63) следует пользоваться функцией деления
по модулю:
(︃
𝜑𝜉 =
(︃
sign (𝜉2 (𝑡)) arccos
Для определения
𝜇𝜉
и
𝜑𝜉
𝜉˙2 (𝑡)
𝜇𝜉 𝜔
)︃
)︃
− 𝜔𝑡
mod
2𝜋.
(2.64)
мы использовали недоступные для
измерения переменные. однако у нас построены все необходимые
наблюдатели, обеспечивающие экспоненциальную сходимость оце-
𝜔 , 𝜉2 (𝑡), 𝜉˙2 (𝑡) и 𝜇𝜉 подставим
и (2.64) значения оценок 𝜔
ˆ (𝑡) (или 𝜂(𝑡) для исключения
ˆ2 (𝑡), 𝜉ˆ3 (𝑡) и 𝜇
на ноль), 𝜉
ˆ𝜉 (𝑡) соответственно и получим со-
нок к истинным значениям. Вместо
в (2.60)
деления
отношения (2.54) и (2.55). Рассматривая ошибки оценивания для
(2.54) и (2.55), нетрудно убедиться в том, что ошибки
и
𝜑˜𝜉 = 𝜑𝜉 − 𝜑ˆ𝜉
𝜇
˜𝜉 = 𝜇𝜉 − 𝜇
ˆ𝜉
ограничены и экспоненциально стремятся к нулю.
Теперь построим алгоритм оценки значений переменных
𝜙𝜉 .
𝐿𝜉
и
Рассмотрим комплексную переменную:
𝜆2
(𝜆 + 𝑗𝜔)2
=
=
=
𝜆2
𝜆2 (𝜆2 − 𝜔 2 − 2𝜔𝜆𝑗)
= 2
2
− 𝜔 + 2𝜔𝜆𝑗
(𝜆 − 𝜔 2 + 2𝜔𝜆𝑗)(𝜆2 − 𝜔 2 − 2𝜔𝜆𝑗)
𝜆2 (𝜆2 − 𝜔 2 − 2𝜔𝜆𝑗)
(𝜆2 − 𝜔 2 )2 + 4𝜔 2 𝜆2
(︀ 2
)︀
𝜆2
𝜆 − 𝜔 2 − 2𝜔𝜆𝑗 .
(2.65)
(𝜆2 + 𝜔 2 )2
𝜆2
В силу (2.65) для
𝐿𝜉
𝐿𝜉
𝜙𝜉 имеем
⃒
⃒
⃒
⃒
𝜆2
𝜆2
⃒
⃒=
= ⃒
,
⃒
(𝑗𝜔 + 𝜆)2
𝜆2 + 𝜔 2
и
(2.66)
42
Глава 2. Наблюдение мультигармонических сигналов
𝜙𝜉
𝜆2
arg
= −arccos
(𝑗𝜔 + 𝜆)2
=
(︂
𝜆2 − 𝜔 2
𝜆2 + 𝜔 2
)︂
.
(2.67)
𝜔
ˆ (𝑡) вместо 𝜔 в (2.66) (2.67) получим реализуемые
ˆ 𝜉 и 𝜙ˆ𝜉 (2.56). В силу того, что оценка часто𝐿
ты 𝜔
ˆ (𝑡) экспоненциально стремится к значению 𝜔 , то ошибки оце˜ 𝜉 = 𝐿𝜉 − 𝐿
ˆ 𝜉 и 𝜙˜𝜉 = 𝜙𝜉 − 𝜙ˆ𝜉 ограничены и экспоненнивания 𝐿
Подставляя
алгоритмы оценки
циально стремятся к нулю. В этом легко убедиться, рассмотрев
разности между истинными значениями переменных
𝐿𝜉 , 𝜙𝜉
и их
оценками. На основе соотношений (2.58) и полученных алгоритмов
оценки (2.54)–(2.56) получим (2.53). Анализ ограниченности и экспоненциальной сходимости к нулю ошибок оценивания сводится к
рассмотрению разности оценок и истинных значений. На этом доказательство утверждения 2.1 заканчивается.
2.1.4
Числовой пример
Продемонстрируем на числовом примере работу адаптивного алгоритма идентификации всех параметров смещенного синусоидального сигнала (2.8), (2.15)–(2.17), (2.44)–(2.47), (2.53)–(2.56).
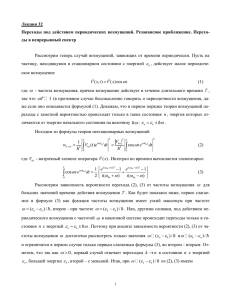
На рис. 2.1 представлены графики переходных процессов для
четырех различных сигналов
𝑦(𝑡),
чтобы показать, что оценки схо-
дятся к истинным значениям, независимо от самих этих значений.
На рис. 2.2 представлены графики переходных процессов для различных параметров идентификатора, чтобы показать, что, увеличивая значения параметров
фикации частоты
𝜔,
𝑘
и
𝜆, можно ускорять процесс иденти-
и, как следствие, оценка остальных парамет-
ров проходит быстрее.
На рис. 2.3 представлены графики переходных процессов для
сигнала переменной формы для того, чтобы проиллюстрировать
адаптивность алгоритма по отношению к изменению параметров
сигнала.
На рис. 2.4 представлены графики переходных процессов для
сигнала
1
𝑦(𝑡) с аддитивным экспоненциально коррелированным шу-
мом , чтобы продемонстрировать робастные свойства алгоритма
1 Экспоненциально коррелированный шум моделировался с помощью фор1
мирующего фильтра 𝑊 (𝑠) = 𝑠+1
, на вход которого подавался частотно огра-
ниченный белый шум мощностью
𝑁 = 0, 1.
2.1. Смещенный синусоидальный сигнал
43
идентификации по отношению к нерегулярной составляющей сигнала.
Рис. 2.1–2.4 демонстрируют эффективность, адаптивные и робастные свойства разработанного метода идентификации параметров смещенного синусоидального сигнала.
ω̂
µ̂
y1
y2
y3
y4
6
5
5
y1
y2
y3
y4
4
4
3
3
2
2
1
1
t, c
0
0
10
20
30
40
14
12
10
20
30
40
50
(б) Временная диаграмма оценки амплитуды 𝜇
^(𝑡).
φ̂
y1
y2
y3
y4
16
t, c
0
0
50
(а) Временная диаграмма оценки частоты 𝜔
^ (𝑡).
σ̂
0,5
y1
y2
y3
y4
6
5
10
4
8
6
3
4
2
2
0
1
t, c
−3
−5
0
10
20
30
40
(в) Временная диаграмма оценки смещения 𝜎
^ (𝑡)
Рис.
2.1.
Временные
t, c
0
0
50
10
20
30
40
50
(г) Временная диаграмма оценки фазы
диаграммы
^
𝜑(𝑡)
оценки
параметров
сигналов
𝑦1 (𝑡) = sin(𝑡 + 1), 𝑦2 (𝑡) = 6 + 0, 5 sin(2𝑡 + 4), 𝑦3 (𝑡) = 10 + 2 sin(3𝑡 + 2)
и 𝑦4 (𝑡) = −3 + 5 sin(4𝑡 + 3) при коэффициентах идентификатора
𝜆 = 2, 𝑘 = 2
44
Глава 2. Наблюдение мультигармонических сигналов
µ̂
ω̂
k = 0, 5 , λ = 0, 6
k = 1,
4
7
λ=1
6
k = 100, λ = 5
5
3
4
2
3
k = 0, 5 , λ = 0, 6
2
1
k = 1,
1
λ=1
k = 100, λ = 5
t, c
0
0
10
20
30
40
t, c
0
0
50
(а) Временная диаграмма оценки частоты 𝜔
^ (𝑡)
10
20
30
40
50
(б) Временная диаграмма оценки амплитуды 𝜇
^(𝑡)
σ̂
φ̂
5
6
k = 0, 5 , λ = 0, 6
k = 1,
λ=1
k = 100, λ = 5
5
4
4
3
3
2
2
k = 0, 5 , λ = 0, 6
k = 1,
1
λ=1
k = 100, λ = 5
0
0
10
20
30
40
1
t, c
t, c
50
(в) Временная диаграмма оценки смещения 𝜎
^ (𝑡)
0
0
10
20
30
40
(г) Временная диаграмма оценки фазы
^
𝜑(𝑡)
Рис. 2.2. Временные диаграммы оценки параметров сигнала
4 + 5 sin(2𝑡 + 1)
и 𝑘
50
𝑦(𝑡) =
𝜆
при различных коэффициентах идентификатора
2.1. Смещенный синусоидальный сигнал
45
µ̂
ω̂
3,5
10
3
8
2,5
2,2
6
1,4
4
1
3
2
0,5
t, c
t, c
0
0
0
10
20
30
40
(а) Временная диаграмма оценки частоты 𝜔
^ (𝑡)
σ̂
0
10
20
30
40
(б) Временная диаграмма оценки амплитуды 𝜇
^(𝑡)
φ̂
6
8
5
6
4
5
3
4
2
2
1
t, c
0
0
10
20
30
40
(в) Временная диаграмма оценки смещения 𝜎
^ (𝑡)
t, c
0
0
10
20
30
(г) Временная диаграмма оценки фазы
^
𝜑(𝑡)
Рис. 2.3. Временные диаграммы оценки параметров сигнала
2 + 3 sin(1, 4𝑡 + 2),
0 ≤ 𝑡 < 20 и 𝑦 = 5 + 4 sin(2, 2𝑡 + 3),
идентификатора 𝜆 = 1 и 𝑘 = 1
для
при коэффициентах
40
для
𝑦(𝑡) =
𝑡 ≥ 20
46
Глава 2. Наблюдение мультигармонических сигналов
y
ω̂
7
2,5
6
2
5
4
1,5
3
1
2
0,5
1
t, c
0
50
60
70
80
90
100
(а) Фрагмент временной диаграммы
зашумленного сигнала 𝑦(𝑡)
µ̂
t, c
0
0
50
100
150
200
(б) Временная диаграмма оценки частоты 𝜔
^ (𝑡)
σ̂
8
8
6
6
4
4
2
2
0
t, c
t, c
0
0
50
100
150
200
(в) Временная диаграмма оценки амплитуды 𝜇
^(𝑡)
−2
0
50
100
150
200
(г) Временная диаграмма оценки смещения 𝜎
^ (𝑡)
Рис. 2.4. Временные диаграммы сигнала
𝑦(𝑡) = 4 + 3 sin(2𝑡 + 2)
с аддитивным шумом в измерении и оценки его параметров при
коэффициентах идентификатора
𝜆 = 0, 6
и
𝑘 = 0, 4
2.2 Алгоритм адаптивной идентификации частот и
наблюдатель гармоник мультигармонического сигнала
2.2
Алгоритм
адаптивной
47
идентифика-
ции частот и наблюдатель гармоник
мультигармонического сигнала
В этом разделе рассмотрена задача идентификации параметров
мультигармонического сигнала: частоты, амплитуды и начальные
фазы всех гармоник. Наряду с определением постоянных параметров сигнала решена задача выделения из многокомпонентного сигнала каждой гармоники.
Для вывода результата использован подход предыдущего раздела: методика синтеза алгоритма идентификации неизвестных параметров и доказательство эффективности разработанной схемы.
2.2.1
Постановка задачи
Рассматривается измеряемый сигнал вида
𝑦(𝑡) = 𝜎 +
𝑘
∑︁
𝜇𝑖 sin(𝜔𝑖 𝑡 + 𝜑𝑖 ),
(2.68)
𝑖=1
являющийся суммой
начальными фазами
ными. Здесь и далее
𝑘 гармоник с частотами 𝜔𝑖 , амплитудами 𝜇𝑖 и
𝜑𝑖 . Константы 𝜔𝑖 , 𝜇𝑖 и 𝜑𝑖 являются неизвестсимвол 𝑖 означает номер гармоники 𝑖 = 1, 𝑘 .
Д о п у щ е н и е 2.3 Все ненулевые частоты гармоник сигнала 𝑦(𝑡) не меньше некоторого известного числа 𝜔0 , т.е. 𝜔𝑖 > 𝜔0 .
Сформулируем цель управления как решение задачи синтеза
устройства оценки, обеспечивающего для любых
𝜎, 𝜑𝑖 , 𝜇𝑖
и
𝜔𝑖 > 0
выполнения условий
lim |𝜔𝑖 − 𝜔
ˆ 𝑖 (𝑡)| = 0,
𝑡→∞
lim |𝜇𝑖 − 𝜇
ˆ𝑖 (𝑡)| = 0,
𝑡→∞
𝑡→∞
𝑡→∞
lim |𝜎 − 𝜎
ˆ (𝑡)| = 0,
⃒
⃒
⃒
⃒
lim ⃒𝜑𝑖 − 𝜑ˆ𝑖 (𝑡)⃒ = 0,
(2.69)
𝜔
ˆ (𝑡) — текущая оценка частоты 𝜔 , 𝜎
ˆ (𝑡) — текущая оценка смещеˆ — текущая оценка
ния 𝜎 , 𝜇
ˆ(𝑡) — текущая оценка амплитуды 𝜇, 𝜑(𝑡)
фазового сдвига 𝜑.
где
48
Глава 2. Наблюдение мультигармонических сигналов
2.2.2
Алгоритм идентификации частот смещенного мультигармонического сигнала
Известно [10, 93], что для генерирования сигнала
𝑦(𝑡)
можно ис-
пользовать дифференциальное уравнение вида
𝑝(𝑝2 − 𝜃1 )(𝑝2 − 𝜃2 )· · · (𝑝2 − 𝜃𝑘 )𝑦(𝑡) = 0,
где
𝑝 = 𝑑/𝑑𝑡
— оператор дифференцирования,
ные параметры. Перепишем уравнение (2.70):
(2.70)
𝜃𝑖 = −𝜔𝑖2
— постоян-
𝑝2𝑘+1 𝑦(𝑡) = 𝜃¯1 𝑝2𝑘−1 𝑦(𝑡) +· · · + 𝜃¯𝑘−1 𝑝3 𝑦(𝑡) + 𝜃¯𝑘 𝑝𝑦(𝑡),
(2.71)
где параметры, полученные после раскрытия скобок в (2.70) определяются системой:
⎧
⎪
⎪
⎪
⎨
𝜃¯1 = 𝜃1 + 𝜃2 +· · · + 𝜃𝑘 ,
𝜃¯2 = −𝜃1 𝜃2 − 𝜃1 𝜃3 −· · · − 𝜃𝑘−1 𝜃𝑘 ,
(2.72)
.
.
⎪
.
⎪
⎪
⎩ ¯
𝜃𝑘 = (−1)𝑘+1 𝜃1 𝜃2 · · · 𝜃𝑘 .
З а м е ч а н и е 2.4 Система (2.72) представляет собой формулы
Виета. Так как параметры 𝜃𝑖 , 𝑖 = 1, 𝑘 являются корнями полинома 𝑝2𝑘 + 𝜃¯1 𝑝2𝑘−2 +· · ·+ 𝜃¯𝑘−1 𝑝2 + 𝜃¯𝑘 , то, на основе значений параметров полинома 𝜃¯𝑖 , 𝑖 = 1, 𝑘 , можно однозначно определить значения
корней 𝜃𝑖 , 𝑖 = 1, 𝑘 , решив простую алгебраическую задачу.
Переходя к изображениям Лапласа в уравнении (2.71), получаем:
𝑠2𝑘+1 𝑦(𝑠) = 𝜃¯1 𝑠2𝑘−1 𝑦(𝑠) +· · · + 𝜃¯𝑘−1 𝑠3 𝑦(𝑠) + 𝜃¯𝑘 𝑠𝑦(𝑠) + 𝑄(𝑠),
где
𝑠
— комплексная переменная,
переменной
𝑦(𝑡),
а полином
𝑄(𝑠)
𝑦(𝑠) = ℒ {𝑦(𝑡)}
(2.73)
— образ Лапласа
обозначает сумму всех членов,
содержащих ненулевые начальные условия.
Умножая обе части (2.71) на комплексное число
𝜆2𝑘
, полу(𝑠+𝜆)2𝑘
чим
𝑠2𝑘+1
𝜆2𝑘
𝜆2𝑘
𝜆2𝑘
𝑦(𝑠) = 𝜃¯1 𝑠2𝑘−1
𝑦(𝑠) +· · · + 𝜃¯𝑘−1 𝑠3
𝑦(𝑠)
2𝑘
2𝑘
(𝑠 + 𝜆)
(𝑠 + 𝜆)
(𝑠 + 𝜆)2𝑘
𝜆2𝑘
𝜆2𝑘 𝑄(𝑠)
+ 𝜃¯𝑘 𝑠
𝑦(𝑠) +
.
(2.74)
2𝑘
(𝑠 + 𝜆)
(𝑠 + 𝜆)2𝑘
2.2. Мультигармонический сигнал
49
Введем в рассмотрение вспомогательный линейный фильтр:
𝜉(𝑠) =
𝜆2𝑘
𝑦(𝑠).
(𝑠 + 𝜆)2𝑘
(2.75)
Подставляя (2.75) в (2.74) и выполняя обратное преобразование
Лапласа, получим:
𝜉 (2𝑘+1) (𝑡) = 𝜃¯1 𝜉 (2𝑘−1) (𝑡) +· · · + 𝜃¯𝑘 𝜉 (1) (𝑡) + 𝜀𝜉 (𝑡),
{︁
(2.76)
}︁
𝜆2𝑘 𝑄(𝑠)
— экспоненциально затухающая функция
(𝑠+𝜆)2𝑘
времени, определяемая ненулевыми начальными условиями.
где
𝜀𝜉 (𝑡) = ℒ−1
З а м е ч а н и е 2.5 Так как экспоненциально затухающая функция 𝜀𝜉 (𝑡) зависит от 𝜆, то можно увеличить скорость сходимости этой функции к нулю, увеличивая значение 𝜆.
В предыдущем разделе мы не пренебрегали экспоненциальной
затухающей функцией
𝜀𝜉 (𝑡) и доказали, что ее наличие не влияет на
свойство устойчивости адаптивной схемы идентификации частоты
синусоидального сигнала. Аналогично, для мультигармонического
сигнала. Чтобы не перегружать пособие малозначительными формулами, пренебрегая экспоненциально затухающей составляющей
𝜀𝜉 (𝑡),
имеем:
𝜉 (2𝑘+1) (𝑡) = Ω𝑇 (𝑡)Θ̄,
(2.77)
[︀ (2𝑘−1)
]︀
𝑇
где Ω (𝑡) =
𝜉
(𝑡) . . . 𝜉 (3) (𝑡) 𝜉 (1) (𝑡) — регрессор, Θ̄𝑇 =
[︀
]︀
𝜃¯1 . . . 𝜃¯𝑘−1 𝜃¯𝑘 — вектор неизвестных параметров.
У т в е р ж д е н и е 2.2 ( [10, 93]) Пусть оценки вектора параметров Θ̄ настраивается следующим образом
ˆ˙ (𝑡) = 𝐾Ω(𝑡)Ω𝑇 (𝑡)(Θ̄ − Θ̄
ˆ (𝑡)),
Θ̄
(2.78)
где 𝐾 = 𝑑𝑖𝑎𝑔{𝑘𝑖 > 0}, тогда
⃒
⃒
⃒
ˆ (𝑡)⃒⃒ = 0.
lim ⃒Θ̄ − Θ̄
𝑡→∞
(2.79)
50
Глава 2. Наблюдение мультигармонических сигналов
Д о к а з а т е л ь с т в о у т в е р ж д е н и я 2.2. Рассмотрим ошибку
оценивания вектора параметров
Θ̄
следующего вида:
˜ (𝑡) = Θ̄ − Θ̄
ˆ (𝑡).
Θ̄
(2.80)
Дифференцируя (2.80), получим
˜˙ (𝑡)
Θ̄
=
ˆ˙ (𝑡)
0 − Θ̄
ˆ)
= −𝐾Ω(𝑡)Ω𝑇 (𝑡)(Θ̄ − Θ̄
˜.
= −𝐾Ω(𝑡)Ω𝑇 (𝑡)Θ̄
(2.81)
Решая дифференциальное уравнение (2.81), получаем
˜ (𝑡) = Θ̄
˜ (0)𝑒−𝐾Ψ(𝑡) ,
Θ̄
где
Ψ(𝑡) =
∫︀ 𝑡
Ω(𝜏 )Ω𝑇 (𝜏 )𝑑𝜏 .
𝑦(𝑡) содержит 𝑘
0
Так как сигнал
(2.82)
гармоник разной частоты, то
функция удовлетворяет условиям предельной интегральной невырожденности [20]. Следовательно, для вектора невязки справедливо
соотношение:
˜ (𝑡) = 0,
lim Θ̄
(2.83)
𝑡→∞
откуда следует, что вектор оценки параметров
ˆ
Θ̄
стремится к ис-
тинному значению (2.79).
Однако, алгоритм (2.78) технически не реализуем, так как содержит неизмеримый вектор
Θ̄.
С учетом (2.77) перепишем (2.78)
в виде
ˆ˙ (𝑡) = 𝐾Ω(𝑡)(𝜉 (2𝑘+1) − Ω𝑇 (𝑡)Θ̄
ˆ (𝑡)).
Θ̄
Переменная
𝜉 (2𝑘+1) (𝑡)
(2.84)
не доступна для измерения, так как динами-
ческий порядок фильтра (2.75) равен
2𝑘 .
Введем в рассмотрение вектор
ˆ (𝑡) − 𝐾Ω(𝑡)𝜉 (2𝑘) (𝑡).
Υ(𝑡) = Θ̄
(2.85)
2.2. Мультигармонический сигнал
51
Дифференцируя (2.85), имеем
Υ̇(𝑡)
ˆ˙ (𝑡) − 𝐾 Ω̇(𝑡)𝜉 (2𝑘) (𝑡) − 𝐾Ω(𝑡)𝜉 (2𝑘+1) (𝑡)
= Θ̄
ˆ (𝑡)
= 𝐾Ω(𝑡)𝜉 (2𝑘+1) − 𝐾Ω(𝑡)Ω𝑇 (𝑡)Θ̄
−𝐾 Ω̇(𝑡)𝜉 (2𝑘) (𝑡) − 𝐾Ω(𝑡)𝜉 (2𝑘+1) (𝑡)
ˆ (𝑡) − 𝐾 Ω̇(𝑡)𝜉 (2𝑘) (𝑡).
= −𝐾Ω(𝑡)Ω𝑇 (𝑡)Θ̄
(2.86)
Из (2.85) и (2.86) получим реализуемый алгоритм идентификации параметров вектора
ˆ (𝑡)
Θ̄
=
Υ̇(𝑡)
=
Θ̄:
Υ(𝑡) + 𝐾Ω(𝑡)𝜉 (2𝑘) (𝑡),
ˆ (𝑡) − 𝐾 Ω̇(𝑡)𝜉 (2𝑘) (𝑡).
−𝐾Ω(𝑡)Ω𝑇 (𝑡)Θ̄
(2.87)
(2.88)
В соответствие с замечанием 2.4, в дальнейшем будем считать,
что на основе вектора оценок
метров
𝜃𝑖 .
𝜃¯𝑖
измерению доступны оценки пара-
Частоты мультигармонического возмущения найдем из
(2.70)
√︂⃒
⃒
⃒
⃒
𝜔
ˆ 𝑖 (𝑡) = ⃒𝜃ˆ𝑖 (𝑡)⃒.
(2.89)
В силу выполнения целевого условия (2.79) и результата, полученного в предыдущем разделе (2.35) и (2.36), имеем соотношение
для частот
lim |𝜔𝑖 − 𝜔
ˆ 𝑖 (𝑡)| = 0.
(2.90)
𝑡→∞
2.2.3
Алгоритм
идентификации
смещения,
ам-
плитуд и фаз гармоник
В этом подразделе будет представлен алгоритм идентификации общего смещения, амплитуд и фаз всех гармоник мультигармонического сигнала на основе оценки частот
ется суммой постоянного смещения
𝜎
𝜔
ˆ 𝑖 (𝑡).
Сигнал (2.68) явля-
и синусоидальных функций
𝛿𝑖 (𝑡) = 𝜇𝑖 sin(𝜔𝑖 𝑡 + 𝜑𝑖 ).
Так как фильтр (2.75) линейный, то реакция на гармоническое
воздействие будет также гармонической функцией с той же частотой. Аналогично для постоянного воздействия. Так как полином
52
Глава 2. Наблюдение мультигармонических сигналов
(𝑠 + 𝜆)2𝑘
гурвицев, то для входного сигнала (2.68) выходная пере-
менная фильтра (2.8) имеет вид
𝜉(𝑡)
= 𝜎𝜉 +
𝑘
∑︁
𝜇𝜉𝑖 sin(𝜔𝑖 𝑡 + 𝜑𝜉𝑖 ) + 𝜀𝜉 (𝑡),
(2.91)
𝑖=1
где
𝜎𝜉
— смещение,
вый сдвиг
𝑖-ой
𝜇𝜉𝑖
— амплитуда
𝜀𝜉 (𝑡)
гармоники и
𝑖-ой
гармоники,
𝜑𝜉𝑖
— фазо-
— экспоненциально затухающая
функция с экспоненциально затухающими производными.
Воспользуемся следующими соотношениями [9]:
𝜉(𝑡)
=
𝜉0 (𝑡) +
𝑘
∑︁
𝜉𝑖 (𝑡) + 𝜀𝜉 (𝑡),
(2.92)
𝑖=1
]︂
𝜆2𝑘
𝜎 = 𝜎,
(𝑝 + 𝜆)2𝑘
[︂
]︂
)︂
(︂
𝜆2𝑘
𝜙𝜉𝑖
𝛿
(𝑡)
=
𝐿
𝛿
,
𝑡
+
𝑖
𝜉𝑖 𝑖
(𝑝 + 𝜆)2𝑘
𝜔𝑖
[︂
𝜉0 (𝑡)
=
𝜉𝑖 (𝑡)
=
(2.93)
(2.94)
⃒
⃒
⃒ 𝜆2𝑘 ⃒
⃒ (𝑗𝜔+𝜆)2𝑘 ⃒
=1—
𝜔=0
положительный передаточный
вход⃒
⃒ коэффициент для постоянного
⃒
где
𝑝 = 𝑑/𝑑𝑡
— оператор дифференцирования,
ного сигнала,
⃒ 𝜆2𝑘 ⃒
𝐿𝜉𝑖 = ⃒ (𝑗𝜔+𝜆)
2𝑘 ⃒
𝜔=𝜔𝑖
и
𝜙𝜉𝑖 = arg
⃒
𝜆2𝑘
— поло(𝑗𝜔+𝜆)2𝑘 ⃒𝜔=𝜔
𝑖
жительный передаточный коэффициент и фазовый сдвиг для синусоидального входного сигнала с частотой
фильтр (2.75),
𝑗=
√
−1
𝜔𝑖 , действующего на
𝜀𝜉 (𝑡) — экспоненци-
— комплексное число,
ально затухающая функция.
Пренебрегая экспоненциально затухающей составляющей
и дифференцируя (2.91)
2𝑘
раз, получим две системы из
𝑘
𝜀𝜉 (𝑡)
линей-
ных уравнений:
⎧ (1)
𝜉 (𝑡) = 𝜉˙1 (𝑡) + 𝜉˙2 (𝑡) +· · · + 𝜉˙𝑘 (𝑡),
⎪
⎪
⎪
⎨ 𝜉 (3) (𝑡) = 𝜃1 𝜉˙1 (𝑡) + 𝜃2 𝜉˙2 (𝑡) +· · · + 𝜃𝑘 𝜉˙𝑘 (𝑡),
⎪
⎪
⎪
⎩
.
.
.
𝜉 (2𝑘−1) (𝑡) = 𝜃1𝑘−1 𝜉˙1 (𝑡) + 𝜃2𝑘−1 𝜉˙2 (𝑡) +· · · + 𝜃𝑘𝑘−1 𝜉˙𝑘 (𝑡)
(2.95)
2.2. Мультигармонический сигнал
53
⎧ (2)
𝜉 (𝑡) = 𝜃1 𝜉1 (𝑡) + 𝜃2 𝜉2 (𝑡) +· · · + 𝜃𝑘 𝜉𝑘 (𝑡),
⎪
⎪
⎪
⎨ 𝜉 (4) (𝑡) = 𝜃12 𝜉1 (𝑡) + 𝜃22 𝜉2 (𝑡) +· · · + 𝜃2 𝜉𝑘 (𝑡),
𝑘
⎪
⎪
⎪
⎩
(2.96)
.
.
.
𝜉 (2𝑘) (𝑡) = 𝜃1𝑘 𝜉1 (𝑡) + 𝜃2𝑘 𝜉2 (𝑡) +· · · + 𝜃𝑘𝑘 𝜉𝑘 (𝑡)
или два матричных уравнения
𝜉 (1) (𝑡)
⎢ 𝜉 (3) (𝑡)
⎢
⎢ ..
⎣ .
⎡
⎤
⎡
1
⎥ ⎢ 𝜃1
⎥ ⎢
⎥ = ⎢ ..
⎦ ⎣ .
(2𝑘−1)
𝜃1𝑘−1
𝜉
(𝑡)
⎤ ⎡
𝜉 (2) (𝑡)
𝜃1
⎢ 𝜉 (4) (𝑡) ⎥ ⎢𝜃12
⎢
⎥ ⎢
⎥ = ⎢ ..
⎢ ..
⎣ .
⎦ ⎣.
𝜃1𝑘
𝜉 (2𝑘) (𝑡)
⎡
···
···
1
𝜃2
.
.
.
..
⎤⎡
1
⎢
𝜃𝑘 ⎥
⎥⎢
. ⎥⎢
. ⎦⎣
.
.
𝜃2𝑘−1 · · ·
𝜃2 · · ·
𝜃22 · · ·
.
.
.
..
.
𝜃2𝑘 · · ·
𝜃𝑘𝑘−1
⎤
𝜉˙1 (𝑡)
𝜉˙2 (𝑡) ⎥
⎥
⎥,
.
.
⎦
.
˙𝜉𝑘 (𝑡)
⎤⎡
⎤
𝜃𝑘
𝜉1 (𝑡)
⎢
⎥
𝜃𝑘2 ⎥
⎥ ⎢ 𝜉2 (𝑡) ⎥
⎥,
. ⎥⎢ .
. ⎦⎣ .
⎦
.
.
𝜉𝑘 (𝑡)
𝜃𝑘𝑘
(2.97)
(2.98)
откуда имеем
⎡
⎤ ⎡
𝜃1
𝜉1 (𝑡)
⎢ 𝜉2 (𝑡) ⎥ ⎢𝜃12
⎢
⎥ ⎢
⎢ ..
⎥ = ⎢ ..
⎣ .
⎦ ⎣.
𝜉𝑘 (𝑡)
𝜃1𝑘
⎡ ˙
𝜉1 (𝑡)
⎢ 𝜉˙2 (𝑡)
⎢
⎢ .
⎣ ..
𝜉˙𝑘 (𝑡)
⎤
⎡
1
⎥ ⎢ 𝜃1
⎥ ⎢
⎥ = ⎢ ..
⎦ ⎣ .
𝜃1𝑘−1
𝜃2 · · ·
𝜃22 · · ·
.
.
.
..
.
𝜃2𝑘 · · ·
1
𝜃2
.
.
.
···
···
..
.
𝜃2𝑘−1 · · ·
⎤−1 ⎡ (2)
𝜉 (𝑡)
𝜃𝑘
⎢ 𝜉 (4) (𝑡)
𝜃𝑘2 ⎥
⎥ ⎢
⎢ ..
. ⎥
. ⎦
⎣ .
.
𝑘
𝜃𝑘
𝜉 (2𝑘) (𝑡)
⎤
⎥
⎥
⎥,
⎦
(2.99)
⎤−1 ⎡ (1)
1
𝜉 (𝑡)
⎢ 𝜉 (3) (𝑡)
𝜃𝑘 ⎥
⎥ ⎢
⎢ ..
. ⎥
. ⎦
⎣ .
.
𝜃𝑘𝑘−1
⎤
⎥
⎥
⎥.
⎦
(2.100)
𝜉 (2𝑘−1) (𝑡)
З а м е ч а н и е 2.6 Обратные матрицы в (2.99) и (2.100) существуют, так как в силу постановки задачи измеряемый сигнал
𝑦(𝑡) имеет 𝑘 гармоник различной частоты.
Реализуемый алгоритм оценки переменных
𝜉𝑖 (𝑡)
и
𝜉˙𝑖 (𝑡)
примет
54
Глава 2. Наблюдение мультигармонических сигналов
вид:
⎡ ˆ
𝜉1 (𝑡)
⎢ 𝜉ˆ2 (𝑡)
⎢
⎢ .
⎣ ..
𝜉ˆ𝑘 (𝑡)
⎡ˆ
𝜃1
⎥ ⎢𝜃ˆ2
⎥ ⎢ 1
⎥=⎢.
⎦ ⎣ ..
𝜃ˆ𝑘
.
.
.
..
.
𝜃ˆ2𝑘 · · ·
1
⎤
⎡
ˆ
𝜉˙1 (𝑡)
1
⎥
⎢ ˆ
⎢ 𝜉˙ (𝑡) ⎥ ⎢ 𝜃ˆ1
⎥ ⎢
⎢ 2
⎥ = ⎢ ..
⎢ .
⎥ ⎣ .
⎢ ..
⎦
⎣
ˆ
𝜃ˆ1𝑘−1
𝜉˙𝑘 (𝑡)
⎡
𝜃ˆ2 · · ·
𝜃ˆ22 · · ·
⎤
1
𝜃ˆ2
.
.
.
···
···
..
.
𝜃ˆ2𝑘−1 · · ·
⎤−1 ⎡ (2)
𝜃ˆ𝑘
𝜉 (𝑡)
⎢ 𝜉 (4) (𝑡)
𝜃ˆ𝑘2 ⎥
⎥ ⎢
⎢ ..
. ⎥
. ⎦
⎣ .
.
𝑘
𝜉 (2𝑘) (𝑡)
𝜃ˆ𝑘
⎤
⎥
⎥
⎥.
⎦
⎤−1 ⎡ (1)
1
𝜉 (𝑡)
⎢ 𝜉 (3) (𝑡)
𝜃ˆ𝑘 ⎥
⎥ ⎢
⎢ ..
. ⎥
. ⎦
⎣ .
.
𝜉 (2𝑘−1) (𝑡)
𝜃ˆ𝑘𝑘−1
(2.101)
⎤
⎥
⎥
⎥,
⎦
(2.102)
По аналогии с результатом, полученным в предыдущем разделе,
представим алгоритм оценки общего смещения, амплитуд и начальных фаз всех гармоник мультигармонического сигнала
𝑦(𝑡).
Наблюдатель общего смещения получим на основе (2.92):
𝜉ˆ0 (𝑡)
= 𝜉(𝑡) −
𝑘
∑︁
(2.103)
𝑖=1
Заметим, что в силу (2.93) переменная
щения
𝜉ˆ𝑖 (𝑡).
𝜉ˆ0 (𝑡)
является оценкой сме-
𝜎.
Так как выполнены соотношения (2.79), (2.90), то из (2.99)–
(2.103) имеем
⃒
⃒
⃒
⃒
lim ⃒𝜉0 (𝑡) − 𝜉ˆ0 (𝑡)⃒
𝑡→∞
⃒
⃒
⃒
⃒
lim ⃒𝜉𝑖 (𝑡) − 𝜉ˆ𝑖 (𝑡)⃒
𝑡→∞
⃒
⃒
⃒
ˆ ⃒
lim ⃒𝜉˙𝑖 (𝑡) − 𝜉˙𝑖 (𝑡)⃒
𝑡→∞
=
0,
(2.104)
=
0,
(2.105)
=
0.
(2.106)
Располагая оценками компонент выходной переменной фильтра
(2.75)
𝜉𝑖 (𝑡)
и их производными
𝜉˙𝑖 (𝑡),
раметры сигнала (2.68): амплитуды
нетрудно оценить искомые па-
𝜇𝑖
и фазы
𝜑𝑖
сигнала
𝑦(𝑡).
2.2. Мультигармонический сигнал
Алгоритм идентификации амплитуд
55
𝜇𝑖
и фаз
𝜑𝑖
имеет вид
(︁
)︁
𝜇
ˆ𝜉𝑖 (𝑡)
, 𝜑ˆ𝑖 (𝑡) = −𝜙ˆ𝜉𝑖 (𝑡) + 𝜑ˆ𝜉𝑖 (𝑡) mod 2𝜋,
ˆ 𝜉𝑖 (𝑡)
𝐿
⎯
)︃2
(︃
⎸
ˆ
⎸
𝜉˙𝑖 (𝑡)
⎷ ˆ2
𝜇
ˆ𝜉𝑖 (𝑡) = 𝜉𝑖 (𝑡) +
,
𝜂𝑖 (𝑡)
(︃
(︃
)︃
)︃
ˆ
(︁
)︁
𝜉˙𝑖 (𝑡)
ˆ
ˆ
𝜑𝜉𝑖 (𝑡) = sign 𝜉𝑖 (𝑡) arccos
−𝜔
ˆ 𝑖 (𝑡)𝑡 mod 2𝜋,
𝜇
ˆ𝜉𝑖 (𝑡)𝜂𝑖 (𝑡)
⃒
⃒
⃒
⃒
𝜆2𝑘
𝜆2𝑘
ˆ
⃒
⃒ , 𝜙ˆ𝜉𝑖 (𝑡) = arg
𝐿𝜉𝑖 (𝑡) = ⃒
,
(𝜆 + 𝑗 𝜔
ˆ 𝑖 (𝑡))2𝑘 ⃒
(𝜆 + 𝑗 𝜔
ˆ 𝑖 (𝑡))2𝑘
𝜇
ˆ𝑖 (𝑡) =
где переменные
где
𝜔0
(2.107)
(2.108)
(2.109)
(2.110)
𝜂𝑖 (𝑡) вводятся также, как и в предыдущем разделе:
{︃
𝜔
ˆ 𝑖 (𝑡) для 𝜔
ˆ 𝑖 (𝑡) > 𝜔0 ,
(2.111)
𝜂𝑖 (𝑡) =
𝜔0
иначе,
— известная нижняя граница частот
𝜔𝑖 .
Такой алгоритм обеспечивает ограниченность и сходимость к
𝜇
˜𝑖 = 𝜇𝑖 − 𝜇
ˆ𝑖 и 𝜑˜𝑖 = 𝜑𝑖 − 𝜑ˆ𝑖 . Переменные
ˆ 𝜉𝑖
являются оценками 𝜇𝜉𝑖 и 𝜑𝜉𝑖 в (2.91) соответственно, а 𝐿
являются оценками 𝐿𝜉𝑖 и 𝜙𝜉𝑖 соответственно.
нулю ошибок оценивания
ˆ𝜉𝑖
и 𝜑
𝜇
ˆ𝜉𝑖
𝜙ˆ𝜉𝑖
и
Анализ ограниченности и сходимости к нулю ошибок оценивания сводится к рассмотрению разности оценок и истинных значений. Доказательство эффективности работы алгоритма (2.107)–
(2.111) аналогично доказательству утверждения 2.1.
56
Глава 2. Наблюдение мультигармонических сигналов
2.2.4
Числовой пример
Продемонстрируем на числовом примере работу адаптивного алгоритма идентификации всех параметров мультигармонического сигнала (2.72), (2.77), (2.87)–(2.89), (2.101)–(2.103), (2.107)–(2.110).
На рис. 2.8а, 2.5 представлены графики переходных процессов
для мультигармонического сигнала
𝑦(𝑡),
чтобы показать, что оцен-
ки сходятся к истинным значениям.
На рис. 2.6 представлены графики переходных процессов для
другого значения параметра
𝜆,
чтобы показать, что, увеличивая
значения этого параметра, можно ускорять процесс идентификации
частот
𝜔𝑖 , и, как следствие, оценка остальных параметров проходит
быстрее.
На рис. 2.8б, 2.7 представлены графики переходных процессов
для сигнала переменной формы для того, чтобы проиллюстрировать адаптивность алгоритма по отношению к изменению параметров сигнала.
На рис. 2.9 представлены графики переходных процессов для
сигнала
2
𝑦(𝑡) с аддитивным экспоненциально коррелированным шу-
мом , чтобы продемонстрировать робастные свойства алгоритма
идентификации по отношению к нерегулярной составляющей сигнала.
Рис. 2.5–2.9 демонстрируют эффективность, адаптивные и робастные свойства разработанного метода идентификации параметров мультигармонического сигнала.
2 Экспоненциально коррелированный шум моделировался с помощью фор1
мирующего фильтра 𝑊 (𝑠) = 𝑠+1
, на вход которого подавался частотно огра-
ниченный белый шум мощностью
𝑁 = 0, 1.
2.2. Мультигармонический сигнал
5
57
10
ω̂1
µ̂1
ω̂2
4
µ̂2
8
3,1
6
2
4
1,4
1
2
t, c
t, c
0
0
10
20
30
40
0
0
50
(а) Временная диаграмма оценки частот 𝜔
^ 𝑖 (𝑡)
10
20
30
40
50
(б) Временная диаграмма оценки амплитуд 𝜇
^𝑖 (𝑡)
7
σ̂
8
6
6
5
4
4
2
3
0
2
φ̂1
φ̂2
1
−2
t, c
t, c
−4
0
10
20
30
40
50
(в) Временная диаграмма оценки смещения 𝜎
^ (𝑡)
0
0
10
20
30
40
50
(г) Временная диаграмма оценки начальных фаз 𝜔
^ 𝑖 (𝑡)
2
1,5
ξˆ1
1
ξˆ2
ˆξ˙
1
1
ˆξ˙
2
0,5
0,5
0
0
−0,5
−1
−0,5
−1,5
t, c
−2
0
10
20
30
40
50
t, c
−1
0
10
20
30
40
50
(д) Временная диаграмма оценки гар-
(е) Временная диаграмма оценки про-
моник 𝜉^𝑖 (𝑡)
изводных гармоник 𝜉˙𝑖 (𝑡)
^
Рис. 2.5. Временные диаграммы оценки параметров сигнала 𝑦(𝑡) =
6 + 3 sin(1, 4𝑡 + 2) + 6 sin(3, 1𝑡 + 4) и наблюдения за гармониками и
их производными сигнала 𝜉(𝑡) при коэффициентах идентификатора
𝜆 = 1, 𝑘1 = 20, 𝑘1 = 10
58
Глава 2. Наблюдение мультигармонических сигналов
6
10
ω̂1
5
µ̂1
ω̂2
8
µ̂2
4
6
3
4
2
3
2
1
t, c
0
0
5
10
t, c
0
15
(а) Временная диаграмма оценки частот 𝜔
^ 𝑖 (𝑡)
0
5
10
15
(б) Временная диаграмма оценки амплитуд 𝜇
^𝑖 (𝑡)
7
σ̂
φ̂1
6
φ̂2
10
5
4
6
5
3
2
0
1
t, c
−5
0
5
10
15
(в) Временная диаграмма оценки смещения 𝜎
^ (𝑡)
t, c
0
0
5
10
15
(г) Временная диаграмма оценки начальных фаз
𝜑^𝑖 (𝑡)
4
4
ξˆ1
3
ˆξ˙
1
2
2
ˆξ˙
2
1
1
3
ξˆ2
0
0
−1
−1
−2
−2
−3
−3
t, c
t, c
−4
0
5
10
15
−4
0
5
10
15
(д) Временная диаграмма оценки гар-
(е) Временная диаграмма оценки про-
моник 𝜉^𝑖 (𝑡)
изводных гармоник 𝜉˙𝑖 (𝑡)
^
Рис. 2.6. Временные диаграммы оценки параметров сигнала 𝑦(𝑡) =
6 + 3 sin(1, 4𝑡 + 2) + 6 sin(3, 1𝑡 + 4) и наблюдения за гармониками и
их производными сигнала 𝜉(𝑡) при коэффициентах идентификатора
𝜆 = 2, 𝑘1 = 20, 𝑘1 = 10
2.2. Мультигармонический сигнал
5
59
10
ω̂1
4
µ̂1
8
ω̂2
3
2.7
6
2.1
4
µ̂2
3
1
2
t, c
0
0
20
40
60
80
100
(а) Временная диаграмма оценки частот 𝜔
^ 𝑖 (𝑡)
t, c
0
0
20
40
60
80
100
(б) Временная диаграмма оценки амплитуд 𝜇
^𝑖 (𝑡)
7
σ̂
6
6
5
5
4
0
3
2
−5
1
t, c
−10
0
20
40
60
80
100
(в) Временная диаграмма оценки смещения 𝜎
^ (𝑡)
10
0
0
t, c
20
40
60
80
100
(г) Временная диаграмма оценки начальных фаз
𝜑^𝑖 (𝑡)
10
ξˆ1
ξˆ2
ˆξ˙
1
5
5
0
0
−5
−5
ˆξ˙
2
t, c
t, c
−10
0
(д)
20
40
Временная
гармоник 𝜉^𝑖 (𝑡)
60
80
диаграмма
100
оценки
−10
0
(е)
20
40
Временная
60
80
диаграмма
100
оценки
^
производных гармоник 𝜉˙𝑖 (𝑡)
𝑦(𝑡) =
6 + 3 sin(2, 1𝑡 + 3) + 4 sin(𝑡 + 2) для 0 ≤ 𝑡 < 50 и 𝑦 = −5 + 4 sin(2𝑡 +
5) + 2 sin(2, 7𝑡 + 1) для 𝑡 ≥ 50 и наблюдения за гармониками и их
производными сигнала 𝜉(𝑡) при коэффициентах идентификатора
𝜆 = 2, 𝑘1 = 20, 𝑘1 = 10
Рис. 2.7. Временные диаграммы оценки параметров сигнала
60
Глава 2. Наблюдение мультигармонических сигналов
y
y
10
10
5
0
5
−5
0
−10
t, c
−5
0
10
20
30
40
50
t, c
−15
0
20
40
(а)
60
80
100
(б)
Рис. 2.8. Временные диаграммы мультигармонических сигналов
𝑦(𝑡) = 6 + 3 sin(1, 4𝑡 + 2) + 6 sin(3, 1𝑡 + 4) (2.8а); 𝑦(𝑡) = 6 + 3 sin(2, 1𝑡 +
3) + 4 sin(𝑡 + 2) для 0 ≤ 𝑡 < 50 и 𝑦 = −5 + 4 sin(2𝑡 + 5) + 2 sin(2, 7𝑡 + 1)
для 𝑡 ≥ 50 (2.8б)
0,8
3,5
0,6
3
0,4
ω̂1
ω̂2
2,5
0,2
2
0
1,5
−0,2
1
−0,4
0,5
−0,6
t, c
−0,8
0
50
100
150
(а) Временная диаграмма аддитивного шума в сигнале 𝑦(𝑡)
t, c
0
0
50
100
150
(б) Временная диаграмма оценки частот 𝜔
^ 𝑖 (𝑡)
Рис. 2.9. Временные диаграммы аддитивного шума и оценок всех
частот сигнала
𝑦(𝑡) = 4+3 sin(𝑡+3)+4 sin(2𝑡+2) при коэффициентах
𝜆 = 0, 7, 𝑘1 = 20, 𝑘1 = 10
идентификатора
2.3 Заключительные выводы по главе
2.3
61
Заключительные выводы по главе
1. В главе описан алгоритм идентификации частоты смещенного
синусоидального сигнала, доступного для измерения.
2. Рассмотрен алгоритм адаптивной идентификации смещения,
амплитуды и начальной фазы смещенного синусоидального
сигнала на основе оценки частоты.
3. Алгоритмы оценивания обобщены на случай мультигармонического сигнала: представлен алгоритм идентификации всех
частот
мультигармонического
сигнала.
Получен
алгоритм
идентификации всех параметров мультигармонического сигнала на основе оценок частот, включая общее смещение, амплитуды и фазы всех гармоник.
4. Приведено доказательство теоремы о том, что ошибка оценивания частоты смещенного синусоидального сигнала экспоненциально стремится к нулю. Показано, что можно управлять скоростью сходимости оценки частоты к истинному значению, изменяя параметры алгоритма идентификации.
5. Отмечены робастные свойства алгоритма идентификации по
отношению к аддитивной нерегулярной составляющей измеряемого сигнала.
Глава 3
Компенсация мультигармонических
возмущений для устойчивых
объектов с запаздыванием в
управлении
Данная глава посвящена методам синтеза адаптивных и робастных алгоритмов управления в условиях запаздывания и возмущающих воздействий. Рассматриваются линейные и нелинейные
объекты с постоянным запаздыванием в канале управления. Возмущающее воздействие представлено в виде мультигармонической
функции времени с неизвестными постоянными параметрами. Отсутствие запаздывания является частным случаем решенной задачи.
Достаточно большое число работ посвящено управлению в условиях действия неизвестного возмущающего воздействия по измерениям только выходной переменной (см., например, [2,3,6–9,20,42,52,
74–77,85–87]). В то же время пользуются популярностью задачи наблюдения и устранения возмущающего воздействия, приложенного
к выходу объекта [3, 4]. Однако, несмотря на большое разнообразие
методов решения и моделей объектов, задача компенсации мультигармонических возмущающих воздействий с ненулевым смещением
для случая, когда канал управления характеризуется запаздыванием, не рассматривалась.
Наибольший интерес представляют задачи, где частота возмущения не известна. Однако в большинстве работ, посвященных синтезу алгоритмов идентификации частоты в непрерывном времени,
3.1. Компенсация возмущения для линейного объекта
63
не обсуждается или отсутствует теоретическое обоснование увеличения быстродействия параметрической сходимости, что, в свою
очередь, также можно отнести к нерешенным задачам идентификации частот периодических сигналов. Предлагаемый в данной статье алгоритм идентификации имеет динамический порядок, равный трем, что, в свою очередь, улучшает наиболее известные результаты, опубликованные в [52, 59, 74–77, 96].
В [76, 77, 85–87] рассматриваются минимально-фазовые модели
объектов управления, а в [6–8] — строго минимально-фазовые с относительной степенью единица. В [8] решена задача компенсации
неизвестного синусоидального возмущения в случае, когда канал
управления характеризуется запаздыванием. В [9] решена задача
компенсации неизвестного синусоидального возмущения для линейного объекта управления любой относительной степени. В [6, 7] решена задача компенсации неизвестного возмущения для параметрически не определенного объекта управления.
В [8, 9] опубликованы результаты по компенсации синусоидального возмущения
𝛿(𝑡) = 𝜎 sin(𝜔𝑡 + 𝜑)
соответственно для строго
минимально-фазового объекта с запаздыванием и объекта без запаздывания, модель которого имеет произвольную относительную
степень. В [8] и [9] для построения регулятора был необходим искусственно реализованный блок запаздывания. В [8] размерность
регулятора составляла
2𝑛 + 3,
где
𝑛
— динамическая размерность
объекта.
В отличие от этих работ в данной главе для объектов с запаздыванием и произвольной относительной степенью математической
модели (в том числе и неминимально-фазовых объектов) предлагается метод компенсации возмущения, представленного в виде векторного возмущающего воздействия
𝐻𝑖 cos(𝜔𝑖 𝑡),
где
𝐸 , 𝐺𝑖
и
𝐻𝑖
∆(𝑡) = 𝐸 +
∑︀𝑘
𝑖=1
𝐺𝑖 sin(𝜔𝑖 𝑡) +
𝑛-мерные
— неизвестные постоянные
вектор-столбцы. В пособии рассматривается принципиально отличающийся метод синтеза закона управления, размерность которого
равна
𝑛+3
в линейном случае и
2𝑛 + 3
в нелинейном. Для фор-
мирования сигнала управления более не требуется искусственный
блок запаздывания, что является более выгодным с точки зрения
простоты реализации регулятора.
В развитие результатов [2, 3, 6–9, 20, 42, 52, 59, 74–77, 85–87, 96]
в данной главе предлагается новый алгоритм компенсации пара-
64
Глава 3. Устойчивые объекты с запаздыванием
метрически не определенного мультигармонического возмущения,
действующего на линейный и нелинейный объект управления, относительная степень модели которого может быть любой, а канал
управления характеризуется запаздыванием. Отсутствие запаздывания является частным случаем решенной задачи.
3.1
Алгоритм компенсации мультигармонического возмущения, действующего на устойчивый линейный объект
управления с запаздыванием
В данном разделе рассмотрена задача компенсации параметрически не определенного мультигармонического возмущения, действующего на линейный объект управления с запаздыванием.
Задача синтеза управления решается в два этапа. Сначала (в
разделе 3.1.2) строится адаптивный идентификатор частоты возмущающего воздействия. Далее (в разделе 3.1.3) с использованием оценки частоты синтезируется реализуемый закон управления,
компенсирующий эффект возмущения на выходе объекта.
3.1.1
Постановка задачи
Рассмотрим линейный объект управления с запаздыванием, подверженный внешнему возмущающему воздействию
˙
𝑋(𝑡)
𝑌 (𝑡)
𝑋 ∈ R𝑛
= 𝐴𝑋(𝑡) + 𝐵𝑈 (𝑡 − ℎ) + ∆(𝑡),
= 𝐶𝑋(𝑡),
(3.1)
(3.2)
𝑌 ∈ R — выходная ре𝑈 ∈ R — управляющее воздействие, ℎ — известное постоянное запаздывание, 𝐴𝑛×𝑛
𝑇
𝑛
— матрица состояния, 𝐵 и 𝐶 — 𝑛-мерные вектор-столбцы, ∆ ∈ R
где
— вектор переменных состояния,
гулируемая переменная, доступная для измерения,
— векторное возмущающее воздействие вида
∆(𝑡) = 𝐸 +
𝑘
∑︁
𝑖=1
𝐺𝑖 sin(𝜔𝑖 𝑡) + 𝐻𝑖 cos(𝜔𝑖 𝑡),
(3.3)
3.1. Компенсация возмущения для линейного объекта
𝐸 , 𝐺𝑖 и 𝐻𝑖 — неизвестные постоянные 𝑛-мерные
𝜔𝑖 — неизвестная частота 𝑖-ой гармоники. Здесь
символ 𝑖 означает номер гармоники 𝑖 = 1, 𝑘 .
65
где
вектор-
столбцы,
и далее
Д о п у щ е н и е 3.1
Тройка матриц 𝐴, 𝐵, 𝐶 полностью управ-
Д о п у щ е н и е 3.2
Матрица 𝐴 гурвицева.
ляема и наблюдаема.
Д о п у щ е н и е 3.3 Частоты возмущающего воздействия не
меньше некоторого известного числа 𝜔0 , т.е. 𝜔𝑖 > 𝜔0 .
Требуется синтезировать закон управления
𝑈 (𝑡)
по выходу,
обеспечивающий ограниченность всех траекторий системы и сходимость выходной переменной к нулю:
lim 𝑌 (𝑡) = 0.
𝑡→∞
3.1.2
(3.4)
Алгоритм адаптивной идентификации частот
Данный раздел посвящен алгоритму идентификации частот возмущающего воздействия. Знания частот возмущения необходимо для
построения закона управления. Как и в [25, 89, 90] рассмотрим изображение по Лапласу выходной переменной замкнутой системы (3.1)
и (3.2):
𝑌 (𝑠) = 𝐶(𝑠𝐼 − 𝐴)−1 𝐵𝑒−𝑠ℎ 𝑈 (𝑠) + 𝐶(𝑠𝐼 − 𝐴)−1 [∆(𝑠) + 𝑋0 ] ,
где
(3.5)
𝑋0 означает начальные условия вектора состояния 𝑋(𝑡). Введем
обозначение
𝛿(𝑠)
где
∆(𝑠)
= 𝐶(𝑠𝐼 − 𝐴)−1 [∆(𝑠) + 𝑥0 ] ,
легко найти из (3.3):
𝑘
∆(𝑠) = 𝐸
1 ∑︁
𝜔𝑖
𝑠
+
𝐺𝑖
+ 𝐻𝑖 2
.
𝑠 𝑖=1 𝑠2 + 𝜔𝑖2
𝑠 + 𝜔𝑖2
(3.6)
66
Глава 3. Устойчивые объекты с запаздыванием
После обратного преобразования Лапласа в уравнении (3.5), учитывая (3.6), получим выражение для выходной переменной
[︂
𝑌 (𝑡)
=
𝑌 (𝑡):
]︂
𝑏(𝑝)
𝑈 (𝑡 − ℎ) + 𝛿(𝑡),
𝑎(𝑝)
(3.7)
𝑝 = 𝑑/𝑑𝑡 — оператор диффернцирования, полиномы 𝑎(𝑝) = 𝑝𝑛 +
𝑎𝑛−1 𝑝𝑛−1 + · · · + 𝑎1 𝑝 + 𝑎0 и 𝑏(𝑝) = 𝑏𝑚 𝑝𝑚 + · · · + 𝑏1 𝑝 + 𝑏0 , 𝑚 6 𝑛
где
соответствуют преобразованию
𝑏(𝑠)
= 𝐶(𝑠𝐼 − 𝐴)−1 𝐵.
𝑎(𝑠)
Д о п у щ е н и е 3.4
вещественной частью.
Так как матрица
𝛿(𝑡)
Полином 𝑏(𝑠) не имеет корней с нулевой
𝐴 гурвицева, то нетрудно видеть, что функция
имеет вид
𝛿(𝑡)
=
𝜎+
𝑘
∑︁
𝜇𝑖 sin(𝜔𝑖 𝑡 + 𝜑𝑖 ) + 𝜀(𝑡),
(3.8)
𝑖=1
где
𝜎
— смещение,
𝜇𝑖
— амплитуда,
𝜑𝑖
— фазовый сдвиг,
𝜀(𝑡)
—
экспоненциально затухающая функция.
Цель управления (3.4) заключается в том, чтобы реакция выхода объекта на возмущающее воздействие
𝛿(𝑡)
в (3.7) была скомпен-
сирована регулятором.
З а м е ч а н и е 3.1 Так как функция 𝜀(𝑡) — результат переходного процесса в устойчивой линейной системе с гурвицевой матрицей состояния, то эта функция может быть представлена в
виде суммы затухающих экспонент, умноженных на константы,
полиномиальные или синусоидальные функции времени. Следовательно, производные этой функции также экспоненциально затухают.
Рассмотрим наблюдатель
ˆ˙
𝑋(𝑡)
=
ˆ
𝑌 (𝑡) =
ˆ + 𝐵𝑈 (𝑡 − ℎ),
𝐴𝑋(𝑡)
ˆ
𝐶 𝑋(𝑡).
(3.9)
(3.10)
3.1. Компенсация возмущения для линейного объекта
67
Вычитая (3.9), (3.10) из (3.1), (3.2), получим модель ошибки
˜
𝑋(𝑡)
˜˙
𝑋(𝑡)
𝑌˜ (𝑡)
ˆ
= 𝑋(𝑡) − 𝑋(𝑡),
˜ + ∆(𝑡),
= 𝐴𝑋(𝑡)
˜
= 𝑌 (𝑡) − 𝑌ˆ (𝑡) = 𝐶 𝑋(𝑡).
(3.11)
(3.12)
Из (3.11), (3.12) получим изображение по Лапласу для
[︁
𝑌˜ (𝑠)
где
˜0
𝑋
𝑌˜ (𝑡):
]︁
˜0 ,
= 𝐶(𝑠𝐼 − 𝐴)−1 ∆(𝑠) + 𝑋
означает начальные условия
˜ .
𝑋(𝑡)
С учетом (3.6) и (3.8) получим
𝑌˜ (𝑡)
= 𝜎+
𝑘
∑︁
𝜇𝑖 sin(𝜔𝑖 𝑡 + 𝜑𝑖 ) + 𝜀˜(𝑡),
(3.13)
𝑖=1
где
𝜀˜(𝑡) — экспоненциально затухающая функция с экспоненциаль-
но затухающими производными.
Как и в главе 2 для построения адаптивного идентификатора частот мультигармонического сигнала
𝑌˜ (𝑡)
будем использовать
дифференциальное уравнение вида
𝑝(𝑝2 − 𝜃1 )(𝑝2 − 𝜃2 )· · · (𝑝2 − 𝜃𝑘 )𝑌˜ (𝑡) = 0,
где
𝑝 = 𝑑/𝑑𝑡
— оператор дифференцирования,
𝜃𝑖 = −𝜔𝑖2
(3.14)
— постоян-
ные параметры. Мы пренебрегли наличием экспоненциальной затухающей функцией
𝜀˜(𝑡),
которая не влияет на устойчивость работы
алгоритма идентификации частот, что показано в главе 2. Перепишем уравнение (3.14):
𝑝2𝑘+1 𝑌˜ (𝑡) = 𝜃¯1 𝑝2𝑘−1 𝑌˜ (𝑡) +· · · + 𝜃¯𝑘−1 𝑝3 𝑌˜ (𝑡) + 𝜃¯𝑘 𝑝𝑌˜ (𝑡),
(3.15)
где параметры, полученные после раскрытия скобок в (3.14) определяются системой:
⎧
𝜃¯1 = 𝜃1 + 𝜃2 +· · · + 𝜃𝑘 ,
⎪
⎪
⎪
⎨ 𝜃¯2 = −𝜃1 𝜃2 − 𝜃1 𝜃3 −· · · − 𝜃𝑘−1 𝜃𝑘 ,
.
.
⎪
.
⎪
⎪
⎩ ¯
𝜃𝑘 = (−1)𝑘+1 𝜃1 𝜃2 · · · 𝜃𝑘 .
(3.16)
68
Глава 3. Устойчивые объекты с запаздыванием
Как и в главе 2 рассмотрим линейный фильтр вида
[︂
𝜉(𝑡)
=
]︂
𝜆2𝑘
𝑌˜ (𝑡).
(𝑝 + 𝜆)2𝑘
(3.17)
Перепишем (3.17) в форме вход-состояние-выход:
⎧
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎨
𝜁˙1 (𝑡) = 𝜁2 (𝑡),
𝜁˙2 (𝑡) = 𝜁3 (𝑡),
.
.
.
𝜁˙2𝑘 (𝑡) = 𝜆2𝑘 𝑌˜ (𝑡) − 𝑞1 𝜁1 − · · · − 𝑞2𝑘 𝜁2𝑘 ,
𝜉(𝑡) = 𝜁1 (𝑡),
(3.18)
⎪
.
⎪
.
⎪
⎪
.
⎪
⎪
⎪
⎪
𝜉 (𝑙) = 𝜁𝑙+1 (𝑡),
⎪
⎪
⎪
.
⎪
⎪
.
⎪
.
⎪
⎪
⎩ (2𝑘)
𝜉
= 𝜆2𝑘 𝑌˜ (𝑡) − 𝑞1 𝜁1 − · · · − 𝑞2𝑘 𝜁2𝑘 ,
где числа
𝑞1 , 𝑞2 , . . . , 𝑞2𝑘
соответствуют коэффициентам полинома
(𝑝 + 𝜆)2𝑘 = 𝑝2𝑘 + 𝑞2𝑘 𝑝2𝑘−1 + · · · + 𝑞2 𝑝 + 𝑞1 .
(3.19)
Далее представлен адаптивный алгоритм идентификации параметров вектора
Θ̄,
содержащего значения частот
𝜔𝑖 .
Алгоритм
адаптации вида
ˆ (𝑡)
Θ̄
Υ(𝑡) + 𝐾Ω(𝑡)𝜉 (2𝑘) (𝑡),
(3.20)
𝑇
(2𝑘)
ˆ
Υ̇(𝑡) = −𝐾Ω(𝑡)Ω (𝑡)Θ̄(𝑡) − 𝐾 Ω̇(𝑡)𝜉
(𝑡),
(3.21)
[︂
]︂
2𝑘
𝜆
𝜉(𝑡) =
𝑌˜ (𝑡).
(3.22)
(𝑝 + 𝜆)2𝑘
[︀ (2𝑘−1)
]︀
𝑇
где Ω (𝑡) =
𝜉 ]︀ (𝑡) . . . 𝜉 (3) (𝑡) 𝜉 (1) (𝑡) — регрессор, Θ̄𝑇 =
[︀
𝜃¯1 . . . 𝜃¯𝑘−1 𝜃¯𝑘 — вектор неизвестных параметров, 𝐾 =
diag{𝑘𝑖 > 0}, обеспечивает сходимость к нулю ошибки оценивания
˜ (𝑡) = Θ̄ − Θ̄
ˆ (𝑡):
Θ̄
⃒
⃒
⃒
ˆ (𝑡)⃒⃒ = 0.
(3.23)
lim ⃒Θ̄ − Θ̄
=
𝑡→∞
3.1. Компенсация возмущения для линейного объекта
69
Доказательство эффективности алгоритма (3.20)–(3.22) и выполнение цели (3.23) представлено в главе 2.
В соответствие с замечанием 2.4, в дальнейшем будем считать,
что на основе вектора оценок
метров
𝜃𝑖 .
𝜃¯𝑖
измерению доступны оценки пара-
Частоты мультигармонического возмущения найдем из
(3.14)
√︂⃒
⃒
⃒
⃒
𝜔
ˆ 𝑖 (𝑡) = ⃒𝜃ˆ𝑖 (𝑡)⃒.
(3.24)
В силу выполнения целевого условия (3.23) и результата, полученного в предыдущей главе (2.35) и (2.36), имеем соотношение для
частот
lim |𝜔𝑖 − 𝜔
ˆ 𝑖 (𝑡)| = 0.
(3.25)
𝑡→∞
3.1.3
Синтез закона управления
В этом разделе представлен закон управления, обеспечивающий
полную компенсацию влияния возмущения на выходную переменную объекта. На основе соотношений (3.7) и (3.8) построим закон
управления
𝑈 (𝑡),
компенсирующий эффект возмущения
ставленный в виде суммы смещения
𝜎,
𝛿(𝑡),
пред-
гармонических функций
𝜇𝑖 sin(𝜔𝑖 𝑡 + 𝜑𝑖 ) и экспоненциально затухающей функции 𝜀(𝑡). Так
𝜀(𝑡) стремится к нулю независимо от управляющего воздействия, то закон управления 𝑈 (𝑡) целесообразно строить
как функция
в виде суммы постоянной и гармонических функций, обеспечивая
компенсацию эффекта возмущения на выходе объекта.
Введем в рассмотрение функции
𝛿0 (𝑡)
= 𝜎,
𝛿𝑖 (𝑡) = 𝜇𝑖 sin(𝜔𝑖 𝑡 + 𝜑𝑖 ).
Так как фильтр (3.17) линейный, то реакция на гармоническое
воздействие будет также гармонической функцией с той же частотой. Аналогично для постоянного воздействия. Так как полином
(𝑠 + 𝜆)2𝑘
гурвицев, то для входного сигнала (3.13) выходная пере-
менная фильтра (3.17) имеет вид
𝜉(𝑡)
= 𝜎𝜉 +
𝑘
∑︁
𝑖=1
𝜇𝜉𝑖 sin(𝜔𝑖 𝑡 + 𝜑𝜉𝑖 ) + 𝜀𝜉 (𝑡),
(3.26)
70
где
Глава 3. Устойчивые объекты с запаздыванием
𝜎𝜉
— смещение,
вый сдвиг
𝑖-ой
𝜇𝜉𝑖
— амплитуда
гармоники и
𝜀𝜉 (𝑡)
𝑖-ой
гармоники,
𝜑𝜉𝑖
— фазо-
— экспоненциально затухающая
функция с экспоненциально затухающими производными.
Следуя результатам [9, 22, 25, 89, 90], имеем
[︂
𝜉(𝑡)
=
]︂
]︂
𝑘 [︂
∑︁
𝜆2
𝜆2
𝜎
+
𝛿𝑖 (𝑡)
(𝑝 + 𝜆)2
(𝑝 + 𝜆)2
𝑖=1
= 𝜉0 (𝑡) +
𝑘
∑︁
𝜉𝑖 (𝑡) + 𝜀𝜉 (𝑡),
(3.27)
𝑖=1
𝜉0 (𝑡)
= 𝜎,
(3.28)
𝜉𝑖 (𝑡)
(︂
)︂
𝜙𝜉𝑖
= 𝐿𝜉𝑖 𝛿𝑖 𝑡 +
,
𝜔𝑖
(3.29)
⃒
⃒
⃒ 𝜆2𝑘 ⃒
𝑝 = 𝑑/𝑑𝑡 — оператор дифференцирования, ⃒ (𝑗𝜔+𝜆)
2𝑘 ⃒
= 1 — поло𝜔=0
жительный передаточный
входного
⃒
⃒ коэффициент для постоянного
⃒
⃒ 𝜆2𝑘 ⃒
𝐿𝜉𝑖 = ⃒ (𝑗𝜔+𝜆)
2𝑘 ⃒
и
𝜙𝜉𝑖 = arg
⃒
𝜆2𝑘
(𝑗𝜔+𝜆)2𝑘 ⃒𝜔=𝜔
— положи𝜔=𝜔𝑖
𝑖
тельный передаточный коэффициент и фазовый сдвиг для синусои-
сигнала,
дального входного сигнала с частотой
(3.17),
𝑗=
√
−1
— комплексное число,
𝜔𝑖 , действующего на фильтр
𝜀𝜉 (𝑡) — экспоненциально за-
тухающая функция.
Рассмотрим функции
𝐿0 =
𝑏0
𝑎0 ,
⃒
⃒
⃒ 𝑏(𝑗𝜔𝑖 ) ⃒
𝐿𝑖 = ⃒ 𝑎(𝑗𝜔
⃒
𝑖)
и
𝜙𝑖 = arg
𝑏(𝑗𝜔𝑖 )
𝑎(𝑗𝜔𝑖 ) .
В следующей лемме рассматривается “идеальный” закон управления [25,89,90], предполагающий знание всех параметров функции
возмущения и обеспечивающий решение поставленной задачи.
Л е м м а 3.1
Закон управления вида
(︂
)︂
𝑘
∑︁
1
1
𝜙𝑖 + 𝜙𝜉𝑖
𝑈 (𝑡) = − 𝜉0 (𝑡 + ℎ) −
𝜉𝑖 𝑡 + ℎ −
𝐿0
𝐿𝐿
𝜔𝑖
𝑖=1 𝑖 𝜉𝑖
(3.30)
обеспечивает экспоненциальную сходимость к нулю выходной переменной 𝑌 (𝑡) и выполнение цели (3.4).
Доказательство
л е м м ы 3.1. Подставляя (3.30) в (3.7) и
3.1. Компенсация возмущения для линейного объекта
71
учитывая (3.28), (3.29), имеем
[︂
𝑌 (𝑡)
=
𝑏(𝑝)
𝑎(𝑝)
+𝜎 +
]︂ (︃
)︂)︃
(︂
𝑘
∑︁
1
1
𝜙𝑖 + 𝜙𝜉𝑖
− 𝜎−
𝜉𝑖 𝑡 −
𝐿0
𝐿𝐿
𝜔𝑖
𝑖=1 𝑖 𝜉𝑖
𝑘
∑︁
𝛿𝑖 (𝑡) + 𝜀(𝑡)
𝑖=1
= −
(︂
)︂
𝑘
∑︁
𝐿𝑖 𝐿𝜉𝑖
𝜙𝜉𝑖
𝜙𝑖
𝐿0
𝜙𝑖 + 𝜙𝜉𝑖
𝜎−
𝛿𝑖 𝑡 −
+
+
𝐿0
𝐿𝐿
𝜔𝑖
𝜔𝑖
𝜔𝑖
𝑖=1 𝑖 𝜉𝑖
+𝜀1 (𝑡) + 𝜎 +
𝑘
∑︁
𝛿𝑖 (𝑡) + 𝜀(𝑡)
𝑖=1
= −𝜎 −
𝑘
∑︁
𝛿𝑖 (𝑡) + 𝜎 +
𝑖=1
𝑘
∑︁
𝛿𝑖 (𝑡) + 𝜀2 (𝑡)
𝑖=1
= 𝜀2 (𝑡),
где
𝜀1 (𝑡)
и
𝜀2 (𝑡)
(3.31)
— экспоненциально затухающие функции.
Лемма 3.1 доказана.
Однако закон управления (3.30) физически не реализуем, так
как содержит неизвестные и недоступные для измерения функции
и упредительные оценки функций времени. В случае постоянного
сигнала предсказывание не представляет проблему, так как такая
функция не зависит от времени, что нельзя сказать о гармонической функции. В следующей лемме показана схема получения упредительной оценки гармонического сигнала.
Л е м м а 3.2 Рассмотрим гармоническую функцию 𝜈(𝑡) с частотой 𝜔 . Допустим, что функция 𝜈(𝑡) и ее производная 𝜈(𝑡)
˙
доступны для измерения. Тогда упредительная оценка для 𝜈(𝑡) может быть получена следующим образом:
𝜈(𝑡 + 𝐻) = 𝜅𝑝 𝜈(𝑡) + 𝜅𝑑 𝜈(𝑡),
˙
(3.32)
где
𝜅𝑝 = cos (𝐻𝜔) ,
и 𝐻 — время упреждения.
𝜅𝑑 =
sin (𝐻𝜔)
𝜔
(3.33)
72
Глава 3. Устойчивые объекты с запаздыванием
Д о к а з а т е л ь с т в о л е м м ы 3.2. Так как
𝜈(𝑡)
имеет синусои-
дальную форму, то
𝜈(𝑡) = 𝜇𝜈 sin (𝜔𝑡 + 𝜑𝜈 ) ,
где
𝜇𝜈
— амплитуда и
𝜑𝜈
𝜈(𝑡)
˙
= 𝜇𝜈 𝜔 cos (𝜔𝑡 + 𝜑𝜈 ) ,
(3.34)
— фазовый сдвиг. На основе уравнений
(3.33) и (3.34) нетрудно получить (3.32)
𝜅𝑝 𝜈(𝑡) + 𝜅𝑑 𝜈(𝑡)
˙
=
cos (𝐻𝜔) 𝜇𝜈 sin (𝜔𝑡 + 𝜑𝜈 )
sin (𝐻𝜔)
𝜇𝜈 𝜔 cos (𝜔𝑡 + 𝜑𝜈 )
+
𝜔
= 𝜇𝜈 sin (𝜔𝑡 + 𝜑𝜈 + 𝐻𝜔)
= 𝜇𝜈 sin (𝜔(𝑡 + 𝐻) + 𝜑𝜈 )
= 𝜈(𝑡 + 𝐻).
Лемма 3.2 доказана.
Далее представлены наблюдатели переменных
𝜉0 (𝑡), 𝜉𝑖 (𝑡) и 𝜉˙𝑖 (𝑡).
Как и в главе 2 мы пренебрегаем экспоненциально затухающей составляющей
𝜀𝜉 (𝑡) и дифференцируем (2.91) 2𝑘 раз. Затем получаем
𝑘 линейных уравнений (2.95) и (2.96) или два мат-
две системы из
ричных уравнения (2.97) и (2.98), откуда имеем
⎡
⎤ ⎡
𝜃1
𝜉1 (𝑡)
⎢ 𝜉2 (𝑡) ⎥ ⎢𝜃12
⎢
⎥ ⎢
⎢ ..
⎥ = ⎢ ..
⎣ .
⎦ ⎣.
𝜉𝑘 (𝑡)
𝜃1𝑘
⎡ ˙
𝜉1 (𝑡)
⎢ 𝜉˙2 (𝑡)
⎢
⎢ .
⎣ ..
𝜉˙𝑘 (𝑡)
⎤
⎡
1
⎥ ⎢ 𝜃1
⎥ ⎢
⎥ = ⎢ ..
⎦ ⎣ .
𝜃1𝑘−1
𝜃2 · · ·
𝜃22 · · ·
.
.
.
..
.
𝜃2𝑘 · · ·
1
𝜃2
.
.
.
···
···
..
.
𝜃2𝑘−1 · · ·
⎤−1 ⎡ (2)
𝜉 (𝑡)
𝜃𝑘
⎢ 𝜉 (4) (𝑡)
𝜃𝑘2 ⎥
⎥ ⎢
⎢ ..
. ⎥
. ⎦
⎣ .
.
𝜃𝑘𝑘
𝜉 (2𝑘) (𝑡)
⎤
⎥
⎥
⎥,
⎦
⎤−1 ⎡ (1)
1
𝜉 (𝑡)
⎢ 𝜉 (3) (𝑡)
𝜃𝑘 ⎥
⎥ ⎢
⎢ ..
. ⎥
. ⎦
⎣ .
.
𝜃𝑘𝑘−1
(3.35)
⎤
⎥
⎥
⎥.
⎦
(3.36)
𝜉 (2𝑘−1) (𝑡)
З а м е ч а н и е 3.2 Обратные матрицы в (3.35) и (3.36) существуют, так как в силу постановки задачи возмущающее воздействие ∆(𝑡) имеет 𝑘 гармоник различной частоты.
3.1. Компенсация возмущения для линейного объекта
Реализуемый алгоритм оценки переменных
𝜉𝑖 (𝑡)
и
𝜉˙𝑖 (𝑡)
73
примет
вид:
⎡ ˆ
𝜉1 (𝑡)
⎢ 𝜉ˆ2 (𝑡)
⎢
⎢ .
⎣ ..
𝜉ˆ𝑘 (𝑡)
⎡ˆ
𝜃1
⎥ ⎢𝜃ˆ2
⎥ ⎢ 1
⎥=⎢.
⎦ ⎣ ..
𝜃ˆ𝑘
𝜃ˆ2 · · ·
𝜃ˆ22 · · ·
⎤
.
.
.
⎤
⎡
ˆ
𝜉˙1 (𝑡)
1
⎥
⎢ ˆ
⎢ 𝜉˙ (𝑡) ⎥ ⎢ 𝜃ˆ1
⎥ ⎢
⎢ 2
⎥ = ⎢ ..
⎢ .
⎥ ⎣ .
⎢ ..
⎦
⎣
ˆ˙
𝜃ˆ1𝑘−1
𝜉𝑘 (𝑡)
.
𝜃ˆ2𝑘 · · ·
1
⎡
..
1
𝜃ˆ2
.
.
.
···
···
..
.
𝜃ˆ2𝑘−1 · · ·
⎤−1 ⎡ (2)
𝜃ˆ𝑘
𝜉 (𝑡)
⎢ 𝜉 (4) (𝑡)
𝜃ˆ𝑘2 ⎥
⎥ ⎢
⎢ ..
. ⎥
. ⎦
⎣ .
.
𝑘
ˆ
𝜉 (2𝑘) (𝑡)
𝜃𝑘
⎤
⎥
⎥
⎥.
⎦
⎤−1 ⎡ (1)
1
𝜉 (𝑡)
⎢ 𝜉 (3) (𝑡)
𝜃ˆ𝑘 ⎥
⎥ ⎢
⎢ ..
. ⎥
. ⎦
⎣ .
.
𝑘−1
ˆ
𝜉 (2𝑘−1) (𝑡)
𝜃𝑘
(3.37)
⎤
⎥
⎥
⎥.
⎦
(3.38)
Наблюдатель общего смещения получим на основе (3.27):
𝜉ˆ0 (𝑡)
= 𝜉(𝑡) −
𝑘
∑︁
𝜉ˆ𝑖 (𝑡).
(3.39)
𝑖=1
Так как выполнены соотношения (3.23), (3.25), то из (3.35)–
(3.39) имеем
⃒
⃒
⃒
⃒
lim ⃒𝜉0 (𝑡) − 𝜉ˆ0 (𝑡)⃒
𝑡→∞
⃒
⃒
⃒
⃒
lim ⃒𝜉𝑖 (𝑡) − 𝜉ˆ𝑖 (𝑡)⃒
𝑡→∞
⃒
⃒
⃒
ˆ ⃒
lim ⃒𝜉˙𝑖 (𝑡) − 𝜉˙𝑖 (𝑡)⃒
𝑡→∞
=
0,
(3.40)
=
0,
(3.41)
=
0.
(3.42)
В следующей теореме представлен реализуемый алгоритм компенсации параметрически не определенного возмущающего воздействия
для
линейного
объекта
управления
с
запаздыванием
[25, 89, 90].
Т е о р е м а 3.1
𝑈 (𝑡) = −
Закон управления вида
𝑘
∑︁
1 ˆ
1
1
ˆ
𝑘𝑝𝑖 (𝑡)𝜉ˆ𝑖 (𝑡) +
𝑘𝑑𝑖 (𝑡)𝜉˙𝑖 (𝑡)
𝜉0 (𝑡) −
ˆ
ˆ
𝐿0
𝐿𝑢𝑖 (𝑡)
𝑖=1 𝐿𝑢𝑖 (𝑡)
(3.43)
74
Глава 3. Устойчивые объекты с запаздыванием
обеспечивает выполнение цели
(3.4),
где
cos (ℎˆ
𝜔𝑖 (𝑡) − 𝜙ˆ𝑢𝑖 (𝑡)) ,
sin (ℎˆ
𝜔𝑖 (𝑡) − 𝜙ˆ𝑢𝑖 (𝑡))
𝑘𝑑𝑖 (𝑡) =
,
𝜂𝑖 (𝑡)
⃒
⃒
⃒
⃒
𝑏(𝑗 𝜔
ˆ 𝑖 (𝑡))𝜆2𝑘
ˆ 𝑢𝑖 (𝑡) = ⃒
⃒,
𝐿
⃒ 𝑎(𝑗 𝜔
2𝑘
ˆ 𝑖 (𝑡))(𝑗 𝜔
ˆ 𝑖 (𝑡) + 𝜆) ⃒
𝑘𝑝𝑖 (𝑡)
𝜙ˆ𝑢𝑖 (𝑡)
=
=
arg
𝑏(𝑗 𝜔
ˆ 𝑖 (𝑡))𝜆2𝑘
,
𝑎(𝑗 𝜔
ˆ 𝑖 (𝑡))(𝑗 𝜔
ˆ 𝑖 (𝑡) + 𝜆)2𝑘
(3.44)
(3.45)
(3.46)
(3.47)
оценка частоты 𝜔
ˆ 𝑖 (𝑡) определяется адаптивным алгоритмом
идентификации (3.20)–(3.17), (3.24), функции 𝜉ˆ0 (𝑡), 𝜉ˆ𝑖 (𝑡), 𝜉ˆ˙𝑖 (𝑡)
определены в (3.37)–(3.39), а переменные 𝜂𝑖 (𝑡) вводятся также,
как и в главе 2:
{︃
𝜔
ˆ 𝑖 (𝑡) для 𝜔
ˆ 𝑖 (𝑡) > 𝜔0 ,
𝜂𝑖 (𝑡) =
(3.48)
𝜔0
иначе,
где 𝜔0 — известная нижняя граница частот 𝜔𝑖 .
Доказательство
т е о р е м ы 3.1. Введем обозначение для
“идеального” управления
(︂
)︂
𝑘
∑︁
1
1
𝜙𝑖 + 𝜙𝜉𝑖
¯
𝜉𝑖 𝑡 + ℎ −
,
𝑈 (𝑡) = − 𝜉0 (𝑡 + ℎ) −
𝐿0
𝐿𝐿
𝜔𝑖
𝑖=1 𝑖 𝜉𝑖
(3.49)
а также рассмотрим ошибку в управлении
˜ (𝑡)
𝑈
Функция
¯ (𝑡).
= 𝑈 (𝑡) − 𝑈
(3.50)
ˆ 𝑢𝑖 (𝑡) — это коэффициент преобразования амплитуды
𝐿
устойчивой линейной динамической системы, зависящий от оценки
частоты
𝜔
ˆ 𝑖 (𝑡),
и эта функция строго положительна в силу допуще-
ния 3.4. В главе 2 показано, что диапазон изменения функций
𝜔
ˆ 𝑖 (𝑡)
ограничен
06𝜔
ˆ (𝑡) 6 𝜔
¯,
где
𝜔
¯
— наибольшее значение функции
(3.51)
𝜔
ˆ 𝑖 (𝑡)
при
∀𝑡.
3.1. Компенсация возмущения для линейного объекта
Следовательно, диапазон изменения функции
75
ˆ 𝑢 (𝑡) также огра𝐿
ничен
ˆ 𝑢𝑖 (𝑡) 6 𝐶2𝑖 , ∀𝑡 > 0,
𝐶1𝑖 6 𝐿
где
ˆ 𝑢𝑖 (𝑡), ∀ˆ
𝐶1𝑖 = min 𝐿
𝜔 (𝑡)
ные числа.
Функция
𝑈 (𝑡)
˜ (𝑡)
𝑈
и
ˆ 𝑢𝑖 (𝑡), ∀ˆ
𝐶2𝑖 = max 𝐿
𝜔𝑖 (𝑡)
— положитель-
зависит от ограниченных функций
(3.43). Таким образом, функция
˜ (𝑡)
𝑈
¯ (𝑡)
𝑈
(3.49) и
ограничена. Далее пока-
жем, что эта функция стремится к нулю.
Рассмотрим предел
(︀
)︀
¯ (𝑡)
˜ (𝑡) = lim 𝑈 (𝑡) − 𝑈
lim 𝑈
𝑡→∞
𝑡→∞
(︃
𝑘
∑︁
1
1 ˆ
1
ˆ
𝑘𝑝𝑖 (𝑡)𝜉ˆ𝑖 (𝑡) +
𝑘𝑑𝑖 (𝑡)𝜉˙𝑖 (𝑡)
= lim − 𝜉0 (𝑡)−
ˆ
ˆ
𝑡→∞
𝐿0
𝐿𝑢𝑖 (𝑡)
𝑖=1 𝐿𝑢𝑖 (𝑡)
)︂)︃
(︂
𝑘
∑︁ 1
1
𝜙𝑖 + 𝜙𝜉𝑖
+ 𝜉0 (𝑡 + ℎ) +
𝜉𝑖 𝑡+ℎ−
. (3.52)
𝐿0
𝐿𝐿
𝜔𝑖
𝑖=1 𝑖 𝜉𝑖
Рассмотрим каждый член в (3.52) отдельно. Так как функция
lim𝑡→∞ 𝜉0 (𝑡) = 𝜎
— константа, то с учетом (3.40) имеем
lim
𝑡→∞
(︁
)︁
𝜉ˆ0 (𝑡) − 𝜉0 (𝑡 + ℎ) = 0.
lim𝑡→∞ 𝜔
ˆ 𝑖 (𝑡) = 𝜔𝑖 , откуда
⃒
⃒
⃒
⃒
𝑏(𝑗 𝜔
ˆ 𝑖 (𝑡))𝜆2
ˆ
⃒
⃒
lim 𝐿𝑢𝑖 (𝑡) = lim ⃒
2
𝑡→∞
𝑡→∞ 𝑎(𝑗 𝜔
ˆ 𝑖 (𝑡))(𝑗 𝜔
ˆ 𝑖 (𝑡) + 𝜆) ⃒
⃒⃒
⃒
⃒
⃒ 𝑏(𝑗𝜔𝑖 ) ⃒ ⃒
⃒
𝜆2
⃒
⃒
⃒
⃒
= ⃒
⃒
⃒
2
𝑎(𝑗𝜔𝑖 ) (𝑗𝜔𝑖 + 𝜆) ⃒
= 𝐿𝑖 𝐿𝜉𝑖 ,
(3.53)
В силу (3.25) получим
lim 𝜙ˆ𝑢𝑖 (𝑡)
𝑡→∞
𝑏(𝑗 𝜔
ˆ 𝑖 (𝑡))𝜆2
𝑡→∞
𝑎(𝑗 𝜔
ˆ 𝑖 (𝑡))(𝑗 𝜔
ˆ 𝑖 (𝑡) + 𝜆)2
𝑏(𝑗𝜔𝑖 )
𝜆2
= arg
+ arg
𝑎(𝑗𝜔𝑖 )
(𝑗𝜔𝑖 + 𝜆)2
= 𝜙𝑖 + 𝜙𝜉𝑖 ,
=
(3.54)
lim arg
(3.55)
76
Глава 3. Устойчивые объекты с запаздыванием
lim 𝑘𝑝𝑖 (𝑡)
=
𝑡→∞
lim cos (ℎˆ
𝜔𝑖 (𝑡) − 𝜙ˆ𝑈 𝑖 (𝑡))
𝑡→∞
cos (ℎ𝜔𝑖 − 𝜙𝑖 − 𝜙𝜉𝑖 ) ,
sin (ℎˆ
𝜔𝑖 (𝑡) − 𝜙ˆ𝑢𝑖 (𝑡))
lim 𝑘𝑑𝑖 (𝑡) = lim
𝑡→∞
𝑡→∞
𝜂𝑖 (𝑡)
sin (ℎ𝜔𝑖 − 𝜙𝑖 − 𝜙𝜉𝑖 )
=
.
𝜔𝑖
=
(3.56)
(3.57)
Подставляя (3.41), (3.42), (3.53)-(3.57) в (3.52) получим
𝑘
∑︁
1
1
𝜉0 (𝑡 + ℎ)−
(cos (ℎ𝜔𝑖 −𝜙𝑖 −𝜙𝜉𝑖 ) 𝜉𝑖 (𝑡)
𝑡→∞
𝐿0
𝐿
𝐿𝜉𝑖
𝑖
𝑖=1
)︂
sin (ℎ𝜔𝑖 − 𝜙𝑖 − 𝜙𝜉𝑖 ) ˙
+
𝜉𝑖 (𝑡)
𝜔𝑖
)︂)︃
(︂
𝑘
∑︁
1
1
𝜙𝑖 + 𝜙𝜉𝑖
+ 𝜉0 (𝑡 + ℎ)+
𝜉𝑖 𝑡+ℎ−
. (3.58)
𝐿0
𝐿𝐿
𝜔𝑖
𝑖=1 𝑖 𝜉𝑖
(︃
˜ (𝑡) = lim
lim 𝑈
𝑡→∞
−
В силу (3.41) для
𝑡→∞
переменная
𝜉𝑖 (𝑡)
является гармониче-
ской. Используя результат леммы 3.2, получим
cos (ℎ𝜔𝑖 − 𝜙𝑖 − 𝜙𝜉𝑖 ) 𝜉𝑖 (𝑡) +
)︂
(︂
𝜙𝑖 + 𝜙𝜉𝑖
.
= 𝜉𝑖 𝑡 + ℎ −
𝜔𝑖
sin (ℎ𝜔𝑖 − 𝜙𝑖 − 𝜙𝜉𝑖 ) ˙
𝜉𝑖 (𝑡)
𝜔𝑖
(3.59)
Подставляя (3.59) в (3.58), имеем
˜ (𝑡) = 0.
lim 𝑈
𝑡→∞
Таким образом, функция
˜ (𝑡)
𝑈
ограничена и стремится к нулю.
Управляющее воздействие, обеспечивающее компенсацию возмущения, имеет вид
(︂
)︂
𝑘
∑︁
1
1
𝜙𝑖 + 𝜙𝜉𝑖
˜ (𝑡). (3.60)
𝑈 (𝑡) = − 𝜉0 (𝑡 + ℎ) −
𝜉𝑖 𝑡+ℎ−
+𝑈
𝐿0
𝐿
𝐿
𝜔
𝑖
𝜉𝑖
𝑖
𝑖=1
3.1. Компенсация возмущения для линейного объекта
77
Подставляя (3.60) в (3.7) с учетом леммы 3.1, получим
[︂
𝑏(𝑝)
𝑌 (𝑡) =
𝑎(𝑝)
]︂ (︃
+ 𝛿0 (𝑡) +
)︂
(︂
𝑘
∑︁
1
1
𝜙𝑖 + 𝜙𝜉𝑖
˜
𝑈 (𝑡) −
𝜉0 (𝑡 + ℎ) −
𝜉𝑖 𝑡+ℎ−
𝐿0
𝐿𝐿
𝜔𝑖
𝑖=1 𝑖 𝜉𝑖
𝑘
∑︁
)︃
𝛿𝑖 (𝑡) + 𝜀(𝑡)
𝑖=1
= 𝛼(𝑡) + 𝜀2 (𝑡),
где функция
𝜀2 (𝑡)
𝛼(𝑡) =
[︁
𝑏(𝑝)
𝑎(𝑝)
]︁
˜ (𝑡)
𝑈
ограничена и стремится к нулю,
— экспоненциально затухающая функция.
Теорема 3.1 доказана.
Таким образом, получен реализуемый закон управления (3.43)–
(3.47), обеспечивающий основную цель (3.4)
lim𝑡→∞ 𝑌 (𝑡) = 0.
З а м е ч а н и е 3.3 Следует отметить, что в случае неточного
задания параметров объекта рассматриваемый алгоритм управления может оказаться неудовлетворительным. Разработка робастных алгоритмов, обеспечивающих достижение сформулированной цели управления в случае неточно заданных параметров,
является предметом дальнейших исследований.
3.1.4
Для
Числовой пример
демонстрации
эффективности
предлагаемого
алгоритма
управления представим результаты математического моделирования неминемально-фазового объекта (3.1)-(3.3) с относительной
𝑛−𝑚=2
⎡
−10 1 0
⎢−35 0 1
𝐴=⎢
⎣−50 0 0
−24 0 0
степенью
и параметрами
⎤
⎡ ⎤
⎡ ⎤
⎡ ⎤
0
0
1
1
⎢ 0 ⎥ 𝑇 ⎢0⎥
⎢1⎥
0⎥
⎥ , 𝐵 = ⎢ ⎥ , 𝐶 = ⎢ ⎥ , 𝑥0 = ⎢ ⎥ ,
⎣−5⎦
⎣0⎦
⎣1⎦
1⎦
0
13
0
0
⎡ ⎤
⎡ ⎤
⎡ ⎤
5
2
3
⎢ 10 ⎥
⎢4⎥
⎢6⎥
⎥
⎢ ⎥
⎢ ⎥
𝐸=⎢
⎣ 10 ⎦ , 𝐺1 = ⎣2⎦ , 𝐻1 = ⎣1⎦ .
−4
1
3
(3.61)
78
Глава 3. Устойчивые объекты с запаздыванием
На рис. 3.1 представлены переходные процессы в замкнутой си-
𝜔 = 1, 5, параметров
𝑘 = 10, 𝜆 = 2 и запаздывания ℎ = 6. На рис. 3.2а,
стеме для частоты возмущающего воздействия
закона управления
3.2б представлены переходные процессы в замкнутой системе для
запаздывания
ℎ = 5,
частоты возмущающего воздействия
𝜔=3
и
различных значениях параметров алгоритма управления. На рис.
3.2в, 3.2г представлены переходные процессы в замкнутой системе
для различных значений запаздывания
ℎ = 0,
ℎ,
включая его отсутствие
частоты возмущающего воздействия
алгоритма управления
𝑘 = 10, 𝜆 = 3.
𝜔 = 3
и параметров
На рис. 3.2в, 3.2г представле-
ны переходные процессы в замкнутой системе для возмущающего
1
воздействия с нерегулярной составляющей .
Для иллюстрации эффективности разработанного алгоритма
компенсации возмущений рассмотрим случай с двумя гармониками. Выберем параметры возмущения (3.3)
𝐻2𝑇
= [2 4 − 1 5].
𝐺𝑇2 = [1 2 3 − 1]
и
На рис. 3.3 представлены результаты моделирования замкнутой
системы для частот
𝜔1 = 2
метров закона управления
и 𝜔2 = 3, запаздывания ℎ = 4, пара𝑘1 = 20, 𝑘2 = 20, 𝜆 = 2. На рис. 3.4
представлен результат моделирования мультигармонического возмущения, частоты которого изменились скачкообразно с течением
времени.
Из рис. 3.1-3.4 видно, что цель управления (3.4) достигается
при различных значениях запаздывания, даже при его значительном увеличении. Отсутствие временной задержки является частным случаем рассматриваемой задачи, где
значений параметров закона управления
𝑘
ℎ = 0. С увеличением
𝜆 идентификация ча-
и
стоты и, как следствие, компенсация возмущения происходит быстрее. Показаны адаптивные и робастные свойства алгоритма компенсации возмущения.
1 Нерегулярная составляющая моделировалась с помощью формирующего
1
фильтра 𝑊 (𝑠) = 10𝑠+1
, на вход которого подавалось белошумное воздействие
(с ограниченной частотой) мощностью 𝑁
воздействия была принята равной вектору
= 0, 1. Матрица входов для этого
𝐸.
3.1. Компенсация возмущения для линейного объекта
79
1
ω̂
a
b
2,5
0,5
2
1,5
0
1
−0,5
0,5
t, c
0
0
10
20
30
40
t, c
−1
50
(а) Временная диаграмма оценки частоты 𝜔
^ (𝑡)
0
10
20
30
40
50
(б) Выходная переменная 𝑌 (𝑡) без
управления (a) и с управлением (b)
0
1
0,8
L̂
−0,5
L̂ξ
−1
ϕ̂
ϕ̂ξ
−1,5
0,6
−2
−2,5
0,4
−3
−3,5
0,2
t, c
0
0
(в)
10
20
Временная
функций
30
40
диаграмма
−4
−4,5
0
50
оценки
^
^ 𝜉 (𝑡)
𝐿(𝑡)
и 𝐿
t, c
10
20
(г) Временная
функций 𝜙(𝑡)
^
и
30
40
диаграмма
50
оценки
𝜙
^𝜉 (𝑡)
25
ξˆ0
kp
20
kd
15
0,5
10
0
5
−0,5
−5
0
t, c
−1
0
(д)
10
20
Временная
30
40
диаграмма
функции 𝜉^0 (𝑡)
50
оценки
−10
t, c
−15
0
10
20
30
40
(е) Временная диаграмма
функций 𝑘𝑝 (𝑡) и 𝑘𝑑 (𝑡)
50
оценки
Рис. 3.1. Временные диаграммы оценки частоты возмущения
1, 5,
𝜔 =
выходной переменной, параметров закона управления при за-
паздывании
ℎ=6
и коэффициентах идентификатора
𝜆 = 2, 𝑘 = 10
80
Глава 3. Устойчивые объекты с запаздыванием
2
ω̂
k = 1, λ = 1
4
1
k = 10, λ = 5
3
0
2
−1
1
−2
U=0
k = 1, λ = 1
k = 10, λ = 5
t, c
0
0
5
10
15
20
25
−3
0
30
(а) Временная диаграмма оценки частоты возмущения 𝜔 = 3
10
20
30
(б) Выходная переменная
запаздывании ℎ = 4
ω̂
1
4
0,5
t, c
40
50
𝑌 (𝑡) при
0
3
−0,5
2
−1
h=0
1
h=6
−1,5
h = 15
t, c
0
0
10
20
30
−2
40
(в) Оценки частоты 𝜔
^ (𝑡) при различном запаздывании ℎ
10
20
t, c
30
40
(г) Выходная переменная
различном запаздывании ℎ
𝑌 (𝑡) при
1
ω̂
a
b
2
0,5
1,5
0
1
−0,5
0,5
−1
0
0
t, c
0
20
40
60
80
100
(д) Временная диаграмма оценки частоты возмущения 𝜔
^ (𝑡) с аддитивной
нерегулярной составляющей
t, c
−1,5
0
20
40
60
80
100
(е) Выходная переменная 𝑌 (𝑡) без
управления (a) и с управлением (b)
при запаздывании ℎ = 4 и коэффициентах идентификатора 𝜆 = 1 и 𝑘 = 10
Рис. 3.2. Временные диаграммы оценки частоты и выходной переменной
𝑌 (𝑡)
3.1. Компенсация возмущения для линейного объекта
4
81
1,5
ω̂1
3,5
ω̂2
a
b
1
3
0,5
2,5
0
2
1,5
−0,5
1
−1
0,5
t, c
0
0
50
100
150
200
(а) Временная диаграмма оценки частот 𝜔
^ 𝑖 (𝑡)
t, c
−1,5
0
50
100
150
200
(б) Выходная переменная 𝑌 (𝑡) без
управления (a) и с управлением (b)
1
1,2
ϕ̂1
L1
1
ϕ̂2
0
L2
ϕ̂ξ1
Lξ1
0,8
−1
Lξ2
0,6
−2
0,4
−3
0,2
ϕ̂ξ2
−4
t, c
0
0
(в)
50
Временная
функций
100
150
диаграмма
200
оценки
^ 𝑖 (𝑡) и 𝐿
^ 𝜉𝑖 (𝑡)
𝐿
ξˆ0
t, c
−5
0
50
100
150
(г) Временная диаграмма
функций 𝜙
^𝑖 (𝑡) и 𝜙
^𝜉𝑖 (𝑡)
200
оценки
10
0,5
0
−10
0
−20
kp1
kp2
−0,5
−30
kd1
kd2
t, c
−1
0
(д)
50
Временная
функции 𝜉^0 (𝑡)
100
150
диаграмма
200
оценки
−40
0
50
100
150
(е) Временная диаграмма
функций 𝑘𝑝𝑖 (𝑡) и 𝑘𝑑𝑖 (𝑡)
t, c
200
оценки
𝜔1 = 1,
𝜔2 = 2, выходной переменной 𝑌 (𝑡) и параметров закона управления
при запаздывании ℎ = 6 и коэффициентах идентификатора 𝜆 = 2,
𝑘 = 10
Рис. 3.3. Временные диаграммы оценки частот возмущения
82
Глава 3. Устойчивые объекты с запаздыванием
7
2
ω̂1
6
a
b
1,5
ω̂2
1
5
0,5
4
0
3
−0,5
2
−1
1
−1,5
t, c
0
0
50
100
150
200
250
300
(а) Временная диаграмма оценки частот 𝜔
^ 𝑖 (𝑡)
t, c
−2
0
50
100
150
200
250
300
(б) Временная диаграмма выходной
переменной 𝑌 (𝑡) без управления (a) и
с управлением (b)
𝜔1 =
0 ≤ 𝑡 < 150 и 𝜔1 = 2, 𝜔2 = 4 при 𝑡 ≥ 150 и выходной переменной 𝑌 (𝑡) при запаздывании ℎ = 4 и коэффициентах
идентификатора 𝜆 = 3, 𝑘1 = 20, 𝑘2 = 20
Рис. 3.4. Временные диаграммы оценки частот возмущения
1, 2, 𝜔2 = 3
3.2
при
Алгоритм компенсации мультигармонического возмущения, действующего на устойчивый нелинейный объект
управления с запаздыванием
В данном разделе рассмотрена задача компенсации параметрически не определенного мультигармонического возмущения, действующего на нелинейный объект управления с запаздыванием.
Задача синтеза управления решается в два этапа. Сначала (в
разделе 3.2.3) строится адаптивный идентификатор частоты возмущающего воздействия. Далее (в разделе 3.2.4) с использованием оценки частоты синтезируется реализуемый закон управления,
компенсирующий эффект возмущения на выходе объекта.
3.2. Управление нелинейным объектом
3.2.1
83
Постановка задачи
Рассмотрим нелинейный объект управления с запаздыванием, подверженный внешнему возмущающему воздействию [10, 91, 93]:
˙
𝑋(𝑡)
𝑌 (𝑡)
𝑋 ∈ R𝑛
= 𝐴𝑋(𝑡) + 𝐵𝑢(𝑡 − ℎ) + 𝐹 𝑓 (𝑌 (𝑡)) + ∆(𝑡),
= 𝐶𝑋(𝑡),
(3.62)
(3.63)
𝑌 ∈ R — выходная ре𝑈 ∈ R — управляющее воздействие, ℎ — известное постоянное запаздывание, 𝑓 (𝑌 )
— известная гладкая нелинейная функция, 𝐴𝑛×𝑛 — матрица состо𝑇
𝑛
яния, 𝐵 , 𝐶
и 𝐹 — 𝑛-мерные вектор-столбцы, ∆ ∈ R — векторное
где
— вектор переменных состояния,
гулируемая переменная, доступная для измерения,
возмущающее воздействие вида
∆(𝑡) = 𝐸 +
𝑘
∑︁
𝐺𝑖 sin(𝜔𝑖 𝑡) + 𝐻𝑖 cos(𝜔𝑖 𝑡),
(3.64)
𝑖=1
𝐸 , 𝐺𝑖 и 𝐻𝑖 — неизвестные постоянные 𝑛-мерные
𝜔𝑖 — неизвестная частота 𝑖-ой гармоники. Здесь
символ 𝑖 означает номер гармоники 𝑖 = 1, 𝑘 .
где
вектор-
столбцы,
и далее
Д о п у щ е н и е 3.5
Тройка матриц 𝐴, 𝐵, 𝐶 полностью управ-
Д о п у щ е н и е 3.6
Матрица 𝐴 гурвицева.
ляема и наблюдаема.
Д о п у щ е н и е 3.7 Частоты возмущающего воздействия не
меньше некоторого известного числа 𝜔0 , т.е. 𝜔𝑖 > 𝜔0 .
Д о п у щ е н и е 3.8 Функция 𝑓 (𝑌 ) такая, что положение
равновесия 𝑋 = 0 для автономной системы
˙
𝑋(𝑡)
= 𝐴𝑋(𝑡) + 𝐹 𝑓 (𝑌 (𝑡)),
𝑌 (𝑡)
= 𝐶 𝑇 𝑋(𝑡)
является экспоненцииально устойчивым.
84
Глава 3. Устойчивые объекты с запаздыванием
З а м е ч а н и е 3.4 Введение допущения 3.8 необходимо для обеспечения ограниченности переменных состояния 𝑋(𝑡) при ненулевых, но ограниченных входных сигналах 𝑈 (𝑡) и ∆(𝑡). В связи с
этим будем рассматривать функцию 𝑓 (𝑌 (𝑡)) в (3.62) как некоторый входной сигнал 𝑓 (𝑡), не влияющий на свойство устойчивости системы. Отметим тот факт, что в силу постановки
задачи сигнал f(t) доступен для системы управления: его значение в момент времени 𝑡 может быть рассчитано как известная
нелинейная функция от измеряемой функции 𝑌 : 𝑓 (𝑡) = 𝑓 (𝑌 (𝑡)).
Требуется синтезировать закон управления
𝑈 (𝑡)
по выходу,
обеспечивающий ограниченность всех траекторий системы и сходимость выходной переменной к нулю:
lim 𝑌 (𝑡) = 0.
𝑡→∞
3.2.2
(3.65)
Преобразование нелинейной системы
В данном разделе получено решение для выходной переменной
𝑌 (𝑡)
системы (3.62), (3.63) и выполнен анализ устойчивости нелинейной
системы.
Рассмотрим изображение по Лапласу выходной переменной замкнутой системы (3.62) и (3.63) с учетом замечания 3.4 [10, 91, 93]:
= 𝐶(𝑠𝐼 − 𝐴)−1 𝐵𝑒−𝑠ℎ 𝑈 (𝑠) + 𝐶(𝑠𝐼 − 𝐴)−1 𝐹 𝑓 (𝑠)
𝑌 (𝑠)
+𝐶(𝑠𝐼 − 𝐴)−1 [∆(𝑠) + 𝑋0 ] ,
где
(3.66)
𝑋0 означает начальные условия вектора состояния 𝑋(𝑡). Введем
обозначение
𝛿(𝑠) = 𝐶(𝑠𝐼 − 𝐴)−1 [∆(𝑠) + 𝑋0 ] ,
𝑓¯(𝑠) = 𝐶(𝑠𝐼 − 𝐴)−1 𝐹 𝑓 (𝑠),
где
∆(𝑠)
легко найти из (3.64):
𝑘
∆(𝑠) = 𝐸
1 ∑︁
𝜔𝑖
𝑠
+
𝐺𝑖
+ 𝐻𝑖 2
.
𝑠 𝑖=1 𝑠2 + 𝜔𝑖2
𝑠 + 𝜔𝑖2
(3.67)
(3.68)
3.2. Управление нелинейным объектом
85
После обратного преобразования Лапласа в уравнении (3.66), учитывая (3.67) и (3.68), получим выражение для выходной переменной
𝑌 (𝑡):
[︂
𝑌 (𝑡)
=
]︂
𝑏(𝑝)
𝑈 (𝑡 − ℎ) + 𝑓¯(𝑡) + 𝛿(𝑡),
𝑎(𝑝)
(3.69)
𝑝 = 𝑑/𝑑𝑡 — оператор диффернцирования, полиномы 𝑎(𝑝) = 𝑝𝑛 +
𝑎𝑛−1 𝑝𝑛−1 + · · · + 𝑎1 𝑝 + 𝑎0 и 𝑏(𝑝) = 𝑏𝑚 𝑝𝑚 + · · · + 𝑏1 𝑝 + 𝑏0 , 𝑚 6 𝑛
где
соответствуют преобразованию
𝑏(𝑠)
= 𝐶(𝑠𝐼 − 𝐴)−1 𝐵.
𝑎(𝑠)
Д о п у щ е н и е 3.9
вещественной частью.
Так как матрица
𝛿(𝑡)
Полином 𝑏(𝑠) не имеет корней с нулевой
𝐴 гурвицева, то нетрудно видеть, что функция
имеет вид
𝛿(𝑡)
=
𝜎+
𝑘
∑︁
𝜇𝑖 sin(𝜔𝑖 𝑡 + 𝜑𝑖 ) + 𝜀(𝑡),
(3.70)
𝑖=1
где
𝜎
— смещение,
𝜇𝑖
— амплитуда,
𝜑𝑖
— фазовый сдвиг,
𝜀(𝑡)
—
экспоненциально затухающая функция.
З а м е ч а н и е 3.5 C учетом допущения 3.8 и замечания 3.4 при
нулевых 𝑈 (𝑡) и 𝛿(𝑡) имеем
𝑌 (𝑡) = 𝑓¯(𝑡),
(3.71)
при этом справедливо предельное равенство 𝑙𝑖𝑚𝑡→∞ 𝑌 (𝑡) = 0. Исходя из этого, переформулируем цель управления (3.65) следующим образом: регулятор 𝑈 (𝑡) должен скомпенсировать реакцию
выхода объекта на возмущающее воздействие 𝛿(𝑡) в (3.69).
З а м е ч а н и е 3.6 Так как функция 𝜀(𝑡) — результат переходного процесса в устойчивой линейной системе с гурвицевой матрицей состояния, то эта функция может быть представлена в
виде суммы затухающих экспонент, умноженных на константы,
полиномиальные или синусоидальные функции времени. Следовательно, производные этой функции также экспоненциально затухают.
86
Глава 3. Устойчивые объекты с запаздыванием
3.2.3
Алгоритм адаптивной идентификации частот
В данном разделе представлен алгоритм идентификации частот
возмущения. Как и в [10, 91, 93] рассмотрим наблюдатель
ˆ˙
ˆ + 𝐵𝑈 (𝑡 − ℎ) + 𝐹 𝑓 (𝑡),
𝑋(𝑡)
= 𝐴𝑋(𝑡)
ˆ
𝑌ˆ (𝑡) = 𝐶 𝑋(𝑡),
(3.72)
(3.73)
Вычитая (3.72), (3.73) из (3.62), (3.63), получим модель ошибки
˜
ˆ
𝑋(𝑡)
= 𝑋(𝑡) − 𝑋(𝑡),
˜˙
˜ + ∆(𝑡),
𝑋(𝑡)
= 𝐴𝑋(𝑡)
˜
𝑌˜ (𝑡) = 𝑌 (𝑡) − 𝑌ˆ (𝑡) = 𝐶 𝑋(𝑡).
Из (3.74), (3.75) получим изображение по Лапласу для
𝑌˜ (𝑠)
где
˜0
𝑋
(3.74)
(3.75)
𝑌˜ (𝑡):
[︁
]︁
˜0 ,
= 𝐶(𝑠𝐼 − 𝐴)−1 ∆(𝑠) + 𝑋
означает начальные условия
˜ .
𝑋(𝑡)
С учетом (3.67) и (3.70) получим
𝑌˜ (𝑡)
= 𝜎+
𝑘
∑︁
𝜇𝑖 sin(𝜔𝑖 𝑡 + 𝜑𝑖 ) + 𝜀˜(𝑡),
(3.76)
𝑖=1
где
𝜀˜(𝑡) — экспоненциально затухающая функция с экспоненциаль-
но затухающими производными.
Как и в разделе 3.1 будем использовать адаптивный алгоритм
идентификации параметров вектора
стот
𝜔𝑖 .
Θ̄,
содержащего значения ча-
Алгоритм адаптации вида
ˆ (𝑡)
Θ̄
Υ(𝑡) + 𝐾Ω(𝑡)𝜉 (2𝑘) (𝑡),
(3.77)
𝑇
(2𝑘)
ˆ
Υ̇(𝑡) = −𝐾Ω(𝑡)Ω (𝑡)Θ̄(𝑡) − 𝐾 Ω̇(𝑡)𝜉
(𝑡),
(3.78)
[︂
]︂
2𝑘
𝜆
𝑌˜ (𝑡).
(3.79)
𝜉(𝑡) =
(𝑝 + 𝜆)2𝑘
[︀ (2𝑘−1)
]︀
𝑇
𝑇
(3)
(1)
где Ω (𝑡) =
— регрессор, Θ̄
=
𝜉
(𝑡)
.
.
.
𝜉
(𝑡)
𝜉
(𝑡)
[︀
]︀
¯
¯
¯
𝜃1 . . . 𝜃𝑘−1 𝜃𝑘 — вектор неизвестных параметров, 𝐾 =
=
3.2. Управление нелинейным объектом
diag{𝑘𝑖 > 0}, обеспечивает
˜ (𝑡) = Θ̄ − Θ̄
ˆ (𝑡):
Θ̄
87
сходимость к нулю ошибки оценивания
⃒
⃒
⃒
ˆ (𝑡)⃒⃒ = 0.
lim ⃒Θ̄ − Θ̄
𝑡→∞
(3.80)
Доказательство эффективности алгоритма (3.77)–(3.79) и выполнение цели (3.80) представлено в главе 2.
В соответствие с замечанием 2.4, в дальнейшем будем считать,
что на основе вектора оценок
метров
𝜃𝑖 .
𝜃¯𝑖
измерению доступны оценки пара-
Частоты мультигармонического возмущения найдем из
(3.14)
𝜔
ˆ 𝑖 (𝑡) =
√︂⃒
⃒
⃒ˆ ⃒
⃒𝜃𝑖 (𝑡)⃒.
(3.81)
В силу выполнения целевого условия (3.80) и результата, полученного в предыдущей главе (2.35) и (2.36), имеем соотношение для
частот
lim |𝜔𝑖 − 𝜔
ˆ 𝑖 (𝑡)| = 0.
𝑡→∞
3.2.4
(3.82)
Синтез закона управления
В этом разделе представлен закон управления, обеспечивающий
полную компенсацию влияния возмущения на выходную переменную объекта. Как и в разделе 3.2 на основе соотношений (3.69) и
𝑈 (𝑡), компенсирующий эффект
𝛿(𝑡), представленный в виде суммы смещения 𝜎 , гармонических функций 𝜇𝑖 sin(𝜔𝑖 𝑡 + 𝜑𝑖 ) и экспоненциально затухающей
функции 𝜀(𝑡). Так как функция 𝜀(𝑡) стремится к нулю независимо
от управляющего воздействия, то закон управления 𝑈 (𝑡) целесооб(3.70) построим закон управления
возмущения
разно строить в виде суммы постоянной и гармонических функций,
обеспечивая компенсацию эффекта возмущения на выходе объекта.
Воспользуемся результатом, полученном в разделе 3.1.
Так как фильтр (3.79) линейный, то реакция на гармоническое
воздействие будет также гармонической функцией с той же частотой. Аналогично для постоянного воздействия. Так как полином
88
Глава 3. Устойчивые объекты с запаздыванием
(𝑠 + 𝜆)2𝑘
гурвицев, то для входного сигнала (3.76) выходная пере-
менная фильтра (3.79) имеет вид
𝜉(𝑡)
= 𝜎𝜉 +
𝑘
∑︁
𝜇𝜉𝑖 sin(𝜔𝑖 𝑡 + 𝜑𝜉𝑖 ) + 𝜀𝜉 (𝑡),
(3.83)
𝑖=1
где
𝜎𝜉
— смещение,
вый сдвиг
𝑖-ой
𝜇𝜉𝑖
— амплитуда
гармоники и
𝜀𝜉 (𝑡)
𝑖-ой
гармоники,
𝜑𝜉𝑖
— фазо-
— экспоненциально затухающая
функция с экспоненциально затухающими производными.
Для доказательства работоспособности алгоритма компенсации
удобно предварительно рассмотреть так называемый “идеальный”
закон управления, предполагающий знание всех параметров функции возмущения и обеспечивающий решение поставленной задачи
(см. лемму 3.1).
Закон управления
(︂
)︂
𝑘
∑︁
1
𝜙𝑖 + 𝜙𝜉𝑖
¯ (𝑡) = − 1 𝜉0 (𝑡 + ℎ) −
𝑈
𝜉𝑖 𝑡 + ℎ −
𝐿0
𝐿𝐿
𝜔𝑖
𝑖=1 𝑖 𝜉𝑖
обеспечивает сходимость к нулю выходной переменной
(3.84)
𝑌 (𝑡)
и вы-
полнение цели (3.65).
В самом деле, подставляя (3.84) в (3.69) и учитывая результат
леммы 3.1, имеем
[︂
𝑌 (𝑡)
=
𝑏(𝑝)
𝑎(𝑝)
]︂ (︃
(︂
)︂
𝑘
∑︁
1
1
𝜙𝑖 + 𝜙𝜉𝑖
− 𝜎−
𝜉𝑖 𝑡 −
𝐿0
𝐿𝐿
𝜔𝑖
𝑖=1 𝑖 𝜉𝑖
+𝑓¯(𝑡) + 𝜎 +
𝑘
∑︁
)︃
𝛿𝑖 (𝑡) + 𝜀(𝑡)
𝑖=1
= 𝑓¯(𝑡) + 𝜀2 (𝑡),
где
𝜀2 (𝑡)
(3.85)
— экспоненциально затухающая функция. С учетом заме-
чания 3.5 из (3.85) следует выполнение цели (3.65).
Однако закон управления (3.84) физически не реализуем, так
как содержит неизвестные и недоступные для измерения функции
и упредительные оценки функций времени. В случае постоянного
сигнала предсказывание не представляет проблему, так как такая
3.2. Управление нелинейным объектом
89
функция не зависит от времени, что нельзя сказать о гармонической функции. В лемме 3.2 показана схема получения упредительной оценки гармонического сигнала.
Далее представлены наблюдатели переменных
𝜉0 (𝑡), 𝜉𝑖 (𝑡) и 𝜉˙𝑖 (𝑡).
Как и в главе 2 мы пренебрегаем экспоненциально затухающей составляющей
𝜀𝜉 (𝑡) и дифференцируем (2.91) 2𝑘 раз. Затем получаем
𝑘 линейных уравнений (2.95) и (2.96) или два мат-
две системы из
ричных уравнения (2.97) и (2.98), откуда имеем
⎤ ⎡
𝜃1
𝜉1 (𝑡)
⎢ 𝜉2 (𝑡) ⎥ ⎢𝜃12
⎥ ⎢
⎢
⎢ ..
⎥ = ⎢ ..
⎣ .
⎦ ⎣.
𝜉𝑘 (𝑡)
𝜃1𝑘
⎡
⎡ ˙
𝜉1 (𝑡)
⎢ 𝜉˙2 (𝑡)
⎢
⎢ .
⎣ ..
𝜉˙𝑘 (𝑡)
⎤
⎡
1
⎥ ⎢ 𝜃1
⎥ ⎢
⎥ = ⎢ ..
⎦ ⎣ .
𝜃1𝑘−1
𝜃2 · · ·
𝜃22 · · ·
.
.
.
..
.
𝜃2𝑘 · · ·
1
𝜃2
.
.
.
···
···
..
.
𝜃2𝑘−1 · · ·
⎤−1 ⎡ (2)
𝜉 (𝑡)
𝜃𝑘
⎢ 𝜉 (4) (𝑡)
𝜃𝑘2 ⎥
⎥ ⎢
⎢ ..
. ⎥
. ⎦
⎣ .
.
𝑘
𝜃𝑘
𝜉 (2𝑘) (𝑡)
⎤
⎥
⎥
⎥,
⎦
(3.86)
⎤−1 ⎡ (1)
1
𝜉 (𝑡)
⎢ 𝜉 (3) (𝑡)
𝜃𝑘 ⎥
⎥ ⎢
⎢ ..
. ⎥
. ⎦
⎣ .
.
𝜃𝑘𝑘−1
⎤
⎥
⎥
⎥.
⎦
(3.87)
𝜉 (2𝑘−1) (𝑡)
З а м е ч а н и е 3.7 Обратные матрицы в (3.86) и (3.87) существуют, так как в силу постановки задачи возмущающее воздействие ∆(𝑡) имеет 𝑘 гармоник различной частоты.
Реализуемый алгоритм оценки переменных
𝜉𝑖 (𝑡)
и
𝜉˙𝑖 (𝑡)
примет
вид:
⎡ ˆ
𝜉1 (𝑡)
⎢ 𝜉ˆ2 (𝑡)
⎢
⎢ .
⎣ ..
𝜉ˆ𝑘 (𝑡)
⎡ˆ
𝜃1
⎥ ⎢𝜃ˆ2
⎥ ⎢ 1
⎥=⎢.
⎦ ⎣ ..
𝜃ˆ𝑘
⎤
⎤
⎡
ˆ
𝜉˙1 (𝑡)
1
⎢ ˆ
⎥
⎢ 𝜉˙ (𝑡) ⎥ ⎢ 𝜃ˆ1
⎢ 2
⎥ ⎢
⎢ .
⎥ = ⎢ ..
⎢ ..
⎥ ⎣ .
⎣
⎦
ˆ
𝜃ˆ1𝑘−1
𝜉˙𝑘 (𝑡)
⎡
1
𝜃ˆ2 · · ·
𝜃ˆ22 · · ·
.
.
.
..
.
𝜃ˆ2𝑘 · · ·
1
𝜃ˆ2
.
.
.
···
···
..
.
𝜃ˆ2𝑘−1 · · ·
⎤−1 ⎡ (2)
𝜃ˆ𝑘
𝜉 (𝑡)
⎢ 𝜉 (4) (𝑡)
𝜃ˆ𝑘2 ⎥
⎥ ⎢
⎢ ..
. ⎥
. ⎦
⎣ .
.
𝑘
ˆ
𝜉 (2𝑘) (𝑡)
𝜃𝑘
⎤
⎥
⎥
⎥.
⎦
⎤−1 ⎡ (1)
1
𝜉 (𝑡)
⎢ 𝜉 (3) (𝑡)
𝜃ˆ𝑘 ⎥
⎥ ⎢
⎢ ..
. ⎥
. ⎦
⎣ .
.
𝑘−1
ˆ
𝜉 (2𝑘−1) (𝑡)
𝜃𝑘
(3.88)
⎤
⎥
⎥
⎥.
⎦
(3.89)
90
Глава 3. Устойчивые объекты с запаздыванием
Наблюдатель общего смещения получим на основе (3.27):
𝜉ˆ0 (𝑡)
= 𝜉(𝑡) −
𝑘
∑︁
𝜉ˆ𝑖 (𝑡).
(3.90)
𝑖=1
Так как выполнены соотношения (3.80), (3.82), то из (3.86)–
(3.90) имеем
⃒
⃒
⃒
⃒
lim ⃒𝜉0 (𝑡) − 𝜉ˆ0 (𝑡)⃒
𝑡→∞
⃒
⃒
⃒
⃒
lim ⃒𝜉𝑖 (𝑡) − 𝜉ˆ𝑖 (𝑡)⃒
𝑡→∞
⃒
⃒
⃒
ˆ ⃒
lim ⃒𝜉˙𝑖 (𝑡) − 𝜉˙𝑖 (𝑡)⃒
𝑡→∞
=
0,
(3.91)
=
0,
(3.92)
=
0.
(3.93)
В следующем утверждении представлен реализуемый алгоритм
компенсации параметрически не определенного возмущающего воздействия для нелинейного объекта управления с запаздыванием.
У т в е р ж д е н и е 3.1
𝑈 (𝑡) = −
Закон управления вида
𝑘
∑︁
1 ˆ
1
1
ˆ
𝑘𝑝𝑖 (𝑡)𝜉ˆ𝑖 (𝑡) +
𝑘𝑑𝑖 (𝑡)𝜉˙𝑖 (𝑡)
𝜉0 (𝑡) −
ˆ
ˆ
𝐿0
𝐿𝑢𝑖 (𝑡)
𝑖=1 𝐿𝑢𝑖 (𝑡)
обеспечивает выполнение цели
(3.65),
где
cos (ℎˆ
𝜔𝑖 (𝑡) − 𝜙ˆ𝑢𝑖 (𝑡)) ,
sin (ℎˆ
𝜔𝑖 (𝑡) − 𝜙ˆ𝑢𝑖 (𝑡))
𝑘𝑑𝑖 (𝑡) =
,
𝜂𝑖 (𝑡)
⃒
⃒
⃒
⃒
𝑏(𝑗 𝜔
ˆ 𝑖 (𝑡))𝜆2𝑘
ˆ
⃒
⃒,
𝐿𝑢𝑖 (𝑡) = ⃒
𝑎(𝑗 𝜔
ˆ 𝑖 (𝑡))(𝑗 𝜔
ˆ 𝑖 (𝑡) + 𝜆)2𝑘 ⃒
𝑘𝑝𝑖 (𝑡)
𝜙ˆ𝑢𝑖 (𝑡)
=
=
arg
(3.94)
𝑏(𝑗 𝜔
ˆ 𝑖 (𝑡))𝜆2𝑘
,
𝑎(𝑗 𝜔
ˆ 𝑖 (𝑡))(𝑗 𝜔
ˆ 𝑖 (𝑡) + 𝜆)2𝑘
(3.95)
(3.96)
(3.97)
(3.98)
оценка частоты 𝜔
ˆ 𝑖 (𝑡) определяется адаптивным алгоритмом
идентификации (3.77)–(3.79), (3.81), функции 𝜉ˆ0 (𝑡), 𝜉ˆ𝑖 (𝑡), 𝜉ˆ˙𝑖 (𝑡)
определены в (3.88)–(3.90), а переменные 𝜂𝑖 (𝑡) вводятся также,
как и в главе 2:
{︃
𝜔
ˆ 𝑖 (𝑡) для 𝜔
ˆ 𝑖 (𝑡) > 𝜔0 ,
𝜂𝑖 (𝑡) =
(3.99)
𝜔0
иначе,
3.2. Управление нелинейным объектом
91
где 𝜔0 — известная нижняя граница частот 𝜔𝑖 .
Д о к а з а т е л ь с т в о у т в е р ж д е н и я 3.1. Как и в теореме 3.1
рассмотрим ошибку в управлении
˜ (𝑡)
𝑈
Ошибка
¯ (𝑡).
= 𝑈 (𝑡) − 𝑈
(3.100)
˜ (𝑡) является ограниченной функцией и при этом стре𝑈
мится к нулю:
˜ (𝑡)
lim 𝑈
𝑡→∞
=
0.
(3.101)
Управляющее воздействие, обеспечивающее компенсацию возмущения, имеет вид
)︂
(︂
𝑘
∑︁
1
1
𝜙𝑖 + 𝜙𝜉𝑖
˜ (𝑡). (3.102)
𝑈 (𝑡) = − 𝜉0 (𝑡 + ℎ) −
𝜉𝑖 𝑡+ℎ−
+𝑈
𝐿0
𝐿
𝐿
𝜔
𝑖
𝜉𝑖
𝑖
𝑖=1
Подставляя (3.102) в (3.69) с учетом леммы 3.1, замечания 3.5 и
(3.85), получим
[︂
𝑏(𝑝)
𝑌 (𝑡) =
𝑎(𝑝)
]︂ (︃
)︂)︃
(︂
𝑘
∑︁
1
1
𝜙𝑖 + 𝜙𝜉𝑖
˜
𝑈 (𝑡)− 𝜉0 (𝑡 + ℎ)−
𝜉𝑖 𝑡 + ℎ −
𝐿0
𝐿𝐿
𝜔𝑖
𝑖=1 𝑖 𝜉𝑖
+ 𝑓¯(𝑡) + 𝛿0 (𝑡) +
𝑘
∑︁
𝛿𝑖 (𝑡) + 𝜀(𝑡)
𝑖=1
= 𝑓¯(𝑡) + 𝛼(𝑡) + 𝜀2 (𝑡),
]︁
[︁
𝑏(𝑝) ˜
где функция 𝛼(𝑡) =
𝑎(𝑝) 𝑈 (𝑡) ограничена и стремится к нулю, 𝜀2 (𝑡)
— экспоненциально затухающая функция. Таким образом, получен
реализуемый закон управления (3.94)–(3.98), обеспечивающий основную цель (3.65)
lim𝑡→∞ 𝑌 (𝑡) = 0,
что и требовалось доказать.
З а м е ч а н и е 3.8 Следует отметить, что в случае неточного
задания параметров объекта рассматриваемый алгоритм управления может оказаться неудовлетворительным. Разработка робастных алгоритмов, обеспечивающих достижение сформулированной цели управления в случае неточно заданных параметров,
является предметом дальнейших исследований.
92
Глава 3. Устойчивые объекты с запаздыванием
1
5
a
b
ω̂1
4
ω̂2
0,5
3
0
2
−0,5
1
t, c
t, c
0
0
50
100
150
200
(а) Временная диаграмма оценки частот 𝜔
^ 𝑖 (𝑡)
−1
0
50
100
150
200
(б) Временная диаграмма выходной
переменной 𝑌 (𝑡) без управления (a) и
с управлением (b)
𝜔1 = 1,
𝜔2 = 3 и выходной переменной 𝑌 (𝑡) при запаздывании ℎ = 10, нелинейной функции 𝑓 (𝑌 ) = −(𝑌 + 1) sin(𝑌 ) и коэффициентах идентификатора 𝜆 = 2, 𝑘1 = 20, 𝑘2 = 20
Рис. 3.5. Временные диаграммы оценки частот возмущения
3.2.5
Для
Числовой пример
демонстрации
эффективности
предлагаемого
алгоритма
управления представим результаты математического моделирования нелинейного объекта (3.62)-(3.64) с параметрами
⎡
−10
⎢−35
𝐴=⎢
⎣−50
−24
⎤
⎡ ⎤
⎡ ⎤
⎡ ⎤
⎡ ⎤
0
0
0
1
1
⎢0⎥
⎢1⎥ 𝑇 ⎢0⎥
⎢1⎥
0⎥
⎥ , 𝐵 = ⎢ ⎥ , 𝐹 = ⎢ ⎥ , 𝐶 = ⎢ ⎥ , 𝑥0 = ⎢ ⎥ ,
⎣−5⎦
⎣2⎦
⎣0⎦
⎣1⎦
1⎦
0
13
1
0
0
⎡ ⎤
⎡ ⎤
⎡ ⎤
⎡ ⎤
5
2
3
1
2
⎢ 10 ⎥
⎢4⎥
⎢6⎥
⎢2⎥
⎢4⎥
⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
𝐸=⎢
⎣ 10 ⎦ , 𝐺1 = ⎣2⎦ , 𝐻1 = ⎣1⎦ , 𝐺2 = ⎣ 3 ⎦ , 𝐻2 = ⎣−1⎦ .
−4
1
3
−2
5
1
0
0
0
⎡
0
1
0
0
⎤
На рис. 3.6, 3.5 представлены результаты моделирования для
различных частот возмущения, запаздывания и нелинейных функций
𝑓 (𝑌 ).
Результаты моделирования демонстрируют эффектив-
ность алгоритма компенсации возмущающих воздействий для нелинейных объектов с запаздыванием в канале управления.
3.3 Экспериментальные исследования алгоритма
управления
93
4
1
a
b
ω̂1
3,5
ω̂2
3
0,5
2,3
2
0
1,5
−0,5
1
0,5
t, c
t, c
0
0
50
100
150
200
(а) Временная диаграмма оценки частот 𝜔
^ 𝑖 (𝑡)
−1
0
50
100
150
200
(б) Временная диаграмма выходной
переменной 𝑌 (𝑡) без управления (a) и
с управлением (b)
𝜔1 =
1, 5, 𝜔2 = 2, 3 и выходной переменной 𝑌 (𝑡) при запаздывании ℎ =
4, нелинейной функции 𝑓 (𝑌 ) = −𝑌 3 − sin(𝑌 ) и коэффициентах
идентификатора 𝜆 = 2, 𝑘1 = 20, 𝑘2 = 20
Рис. 3.6. Временные диаграммы оценки частот возмущения
3.3
Экспериментальные
исследования
алгоритма управления
Для иллюстрации работоспособности рассмотренного алгоритма
управления представлены результаты экспериментального исследования разработанного алгоритма на примере мехатронного маятникового комплеса на базе Mechatronic Control Kit (MCK) фирмы
Mechatronic Systems [81].
Описание схемы эксперимента, анализ математической модели маятниковой установки с реакционным колесом, описание реализации алгоритма управления представлены в ряде публикаций
[1, 16, 27, 44, 48, 50, 66, 91, 93].
Для исследования работы алгоритма в условиях запаздывания
программно создается буфер в оперативной памяти контроллера
MСK, через который пропускается функция управления. Величина
имитируемого запаздывания определяется размером буфера.
Для исследования алгоритма управления в условиях действия
возмущающего воздействия близкого по природе к реальному ис-
94
Глава 3. Устойчивые объекты с запаздыванием
пользуется тележка на подвижной основе (рис. 3.7а), на которой
смонтирован маятник. Ко всей конструкции, свободно перемещаемой в горизонтальной плоскости, прикладывается возмущающее
воздействие, создаваемое рукой и имитирующее нерегулярную качку (рис. 3.7б). Рассматривается задача стабилизации нижнего положения равновесия маятника, возмущенного внешним неизмеряемым воздействием при условии запаздывания в канале управления.
На рис. 3.7в–3.7е представлены результаты эксперимента для
запаздывания
𝜆 = 5.
ℎ = 1,
параметров алгоритма управления
𝑘 = 10,
Выходная переменная не стремится к нулю, но находится
в малой окрестности. Это вызвано неточным заданием параметров
объекта управления, которые необходимы при формировании закона управления.
3.4
Заключительные выводы по главе
1. Рассмотрен алгоритм синтеза адаптивного наблюдателя мультигармонического возмущающего воздействия, включая идентификацию всех частот, для устойчивого линейного объекта
управления.
2. Описан алгоритм адаптивной компенсации мультигармонического возмущающего воздействия для линейного объекта с запаздыванием в канале управления.
3. Результаты для линейных объектов обобщены на класс нелинейных систем с запаздыванием в канале управления: приведены алгоритм построения адаптивного наблюдателя возмущения и алгоритм компенсации параметрически не определенного возмущающего воздействия.
4. Рассмотрены числовые примеры моделирования алгоритмов
управления. Приведены результаты экспериментальных исследований описанных алгоритмов на мехатронном маятниковом комплексе.
3.4 Заключительные выводы по главе
95
Возмущение
θ
Маятник
mp , Jp
Реактивное
колесо mr , Jr
θr
(а) Мехатронный маятниковый ком- (б) Маятник на подвижной платформе
плекс
Y (t)
Y (t)
0,4
0,4
0,2
0,2
0
0
−0,2
−0,2
−0,4
−0,4
t, c
−0,6
0
5
10
15
20
25
30
35
(в)
Выходная перемнная
управления
40
45
t, c
−0,6
0
5
10
15
20
25
30
35
40
45
𝑌 (𝑡) без (г) Выходная перемнная 𝑌 (𝑡) с управлением
ω̂
U(t)
4,5
10
4
3,5
5
3
0
2,5
2
−5
1,5
1
−10
0,5
0
0
t, c
5
10
15
20
25
30
35
(д) Оценка частоты
Рис. 3.7.
40
𝜔
^ (𝑡)
45
−15
0
t, c
5
10
15
20
25
30
(е) Управление
35
40
𝑈 (𝑡)
Результаты экспериментальных исследований
45
Глава 4
Компенсация мультигармонических
возмущений для неустойчивых
объектов с запаздыванием в
управлении
Данная глава посвящена методам синтеза адаптивных и робастных алгоритмов управления неустойчивыми объектами в условиях
запаздывания и возмущающих воздействий. Рассматриваются линейные неустойчивые объекты с постоянным запаздыванием в канале управления. Возмущающее воздействие представлено в виде
мультигармонической функции времени с неизвестными постоянными параметрами. Отсутствие запаздывания является частным
случаем решенной задачи.
В данной главе предлагается новый метод синтеза алгоритма компенсации мультигармонического возмущающего воздействия
для неустойчивого объекта управления с запаздыванием в канале
управления. Несмотря на большое разнообразие методов решения и
моделей объектов, задача компенсации мультигармонических возмущающих воздействий с ненулевым смещением для случая, когда
канал управления характеризуется запаздыванием, не рассматривалась. Особо отметим, что задача стабилизации неустойчивых систем с запаздыванием в управлении с одновременной компенсацией
смещенного синусоидального возмущения впервые была поставлена и решена в [89, 90].
Алгоритм стабилизации неустойчивой системы с запаздыванием
основан на решении уравнения в частных производных первого по-
4.1 Постановка задачи
97
рядка (“transport PDE”) [70], [68] с использованием процедуры бэкстеппинг [69]. Закон управления по выходу формируется из двух составляющих: первая расчитывается из соображений стабилизации
неустойчивой системы, и вторая — для компенсации возмущения.
В разделе 4.2 решена задача стабилизации. Представление блока запаздывания в виде уравнения в частных производных необходимо для применения процедуры “backstepping” [70]. Разработан регулятор на основе предиктора Крстича, стабилизирующий
систему с возмущением. Отсутствие запаздывания является частным случаем решенной задачи. В разделе 4.3 построен адаптивный
наблюдатель возмущающего воздействия, обеспечивающий оценку
всех частот. В разделе 4.4 получен алгоритм расчета комбинированного алгоритма управления, способного стабилизировать объект и
компенсировать при этом возмущающее воздействие. Рассмотрен
числовой пример для демонстрации эффективности разработанного алгоритма.
4.1
Постановка задачи
Рассмотрим неустойчивый линейный объект управления с запаздыванием, подверженный внешнему возмущающему воздействию
[89, 90]
˙
𝑋(𝑡)
𝑌 (𝑡)
𝑋 ∈ R𝑛
= 𝐴𝑋(𝑡) + 𝐵𝑈 (𝑡 − ℎ) + ∆(𝑡),
= 𝐶𝑋(𝑡),
(4.1)
(4.2)
𝑌 ∈ R — выходная ре𝑈 ∈ R — управляющее воздействие, ℎ — известное постоянное запаздывание, 𝐴𝑛×𝑛
𝑇
— матрица состояния, которая может быть неустойчивой, 𝐵 и 𝐶
𝑛
— 𝑛-мерные вектор-столбцы, ∆ ∈ R — векторное возмущающее
где
— вектор переменных состояния,
гулируемая переменная, доступная для измерения,
воздействие вида
∆(𝑡) = 𝐸 +
𝑘
∑︁
𝐺𝑖 sin(𝜔𝑖 𝑡) + 𝐻𝑖 cos(𝜔𝑖 𝑡),
(4.3)
𝑖=1
𝐸 , 𝐺𝑖 и 𝐻𝑖 — неизвестные постоянные 𝑛-мерные
𝜔𝑖 — неизвестная частота 𝑖-ой гармоники. Здесь
символ 𝑖 означает номер гармоники 𝑖 = 1, 𝑘 .
где
вектор-
столбцы,
и далее
98
Глава 4. Неустойчивые объекты с запаздыванием
Д о п у щ е н и е 4.1
ляема и наблюдаема.
Тройка матриц 𝐴, 𝐵, 𝐶 полностью управ-
Д о п у щ е н и е 4.2 Частоты возмущающего воздействия не
меньше некоторого известного числа 𝜔0 , т.е. 𝜔𝑖 > 𝜔0 .
Требуется синтезировать закон управления
𝑢(𝑡) по выходу, обес-
печивающий ограниченность всех траекторий системы и сходимость выходной переменной к нулю:
lim 𝑌 (𝑡) = 0.
𝑡→∞
4.2
(4.4)
Алгоритм стабилизации неустойчивого объекта управления с запаздыванием
В данном разделе рассмотрен метод синтеза предиктора, стабилизирующего неустойчивую систему с запаздыванием и возмущающим воздействием (4.1), (4.2).
Следуя результатам [70, 89, 90], представим блок запаздывания
в виде уравнения в частных производных
𝑢𝑡 (𝑥, 𝑡) = 𝑢𝑥 (𝑥, 𝑡),
0 < 𝑥 < ℎ,
𝑢(ℎ, 𝑡) = 𝑈 (𝑡)
(4.5)
(4.6)
𝑢(𝑥, 0) = 𝑈 (𝑥−ℎ). Решение такого уравнения
𝑢(𝑥, 𝑡) = 𝑈 (𝑡 + 𝑥 − ℎ), следовательно, выражение 𝑢(0, 𝑡) =
с начальным условием
имеет вид
𝑈 (𝑡−ℎ) описывает запаздывающий сигнал управления. Перепишем
(4.1) в следующем виде
˙
𝑋(𝑡)
= 𝐴𝑋(𝑡) + 𝐵𝑢(0, 𝑡) + ∆(𝑡).
(4.7)
Рассмотрим наблюдатель
ˆ˙ 1 (𝑡) = 𝐴𝑋
ˆ 1 (𝑡) + 𝐵𝑢(0, 𝑡) + 𝐿𝑌˜1 (𝑡),
𝑋
ˆ 1 (𝑡),
𝑌ˆ1 (𝑡) = 𝐶 𝑋
(4.8)
(4.9)
4.2. Алгоритм стабилизации неустойчивого объекта
99
и ошибку наблюдения
˜ 1 (𝑡) = 𝑋(𝑡) − 𝑋
ˆ 1 (𝑡),
𝑋
˙
˜ 1 (𝑡) = (𝐴 − 𝐿𝐶)𝑋
˜ 1 (𝑡) + ∆(𝑡),
𝑋
˜ 1 (𝑡),
𝑌˜1 (𝑡) = 𝐶 𝑋
где вектор
(4.10)
(4.11)
(4.12)
𝐿 выбирается из условия гурвицевости матрицы 𝐴−𝐿𝐶 .
Следуя методу бэкстеппинг [70], [68], рассмотрим преобразование [90]
𝑤(𝑥,
ˆ 𝑡)
=
ˆ 1 (𝑡)
𝑢(𝑥, 𝑡) − 𝑣(𝑥, 𝑡) − 𝐾𝑒𝐴𝑥 𝑋
∫︁ 𝑥
−𝐾
𝑒𝐴(𝑥−𝑧) 𝐵𝑢(𝑧, 𝑡)𝑑𝑧
0
∫︁
ℎ
+𝐾
𝑒𝐴(𝑥+ℎ−𝑧) 𝐿˜
𝑦 (𝑧, 𝑡)𝑑𝑧,
(4.13)
𝑥
𝑦˜(𝑥, 𝑡)
𝑦˜𝑡 (𝑥, 𝑡)
𝑦˜(ℎ, 𝑡)
= 𝑌˜1 (𝑡 + 𝑥 − ℎ),
= 𝑦˜𝑥 (𝑥, 𝑡),
= 𝑌˜1 (𝑡),
(4.14)
(4.15)
(4.16)
и закон управления
ˆ 1 (𝑡)
𝑈 (𝑡) = 𝑣(ℎ, 𝑡) + 𝐾𝑒𝐴ℎ 𝑋
∫︁ ℎ
+𝐾
𝑒𝐴(ℎ−𝑧) 𝐵𝑢(𝑧, 𝑡)𝑑𝑧 .
(4.17)
0
Такая замена переменных позволяет преобразовать исходный
объект (4.7) в устойчивую систему
˙
𝑋(𝑡)
= (𝐴 + 𝐵𝐾)𝑋(𝑡) + 𝐵𝑣(0, 𝑡)
¯
+ ∆(𝑡)
+ 𝐵 𝑤(0,
ˆ 𝑡) + 𝐵𝜀(𝑡),
(4.18)
𝑣(𝑥, 𝑡) = 𝑉 (𝑡 + 𝑥 − ℎ),
(4.19)
𝑣(ℎ, 𝑡) = 𝑉 (𝑡),
(4.21)
𝑣𝑡 (𝑥, 𝑡) = 𝑣𝑥 (𝑥, 𝑡),
𝑤
ˆ𝑡 (𝑥, 𝑡) = 𝑤
ˆ𝑥 (𝑥, 𝑡),
𝑤(ℎ,
ˆ 𝑡) = 0,
(4.20)
(4.22)
(4.23)
100
где
Глава 4. Неустойчивые объекты с запаздыванием
𝑉 ∈ R
— новый входной управляющий сигнал, который бу-
дет синтезирован для компенсации эффекта возмущения, функция
𝑤(0,
ˆ 𝑡) стремится к нулю за конечное время, матрица 𝐾
из условия гурвецевости матрицы 𝐴 + 𝐵𝐾 , функция
𝑘
∑︁
¯
¯+
∆(𝑡)
=𝐸
выбирается
¯ 𝑖 sin(𝜔𝑖 𝑡) + 𝐻
¯ 𝑖 cos(𝜔𝑖 𝑡)
𝐺
(4.24)
𝑖=1
¯, 𝐺
¯𝑖
является мультигармонической, где 𝐸
(𝑛 × 1)-векторы, и 𝜀(𝑡) — экспоненциально
|𝜀(𝑡)| ≤ 𝜌𝑒−𝛽𝑡 , где 𝜌, 𝛽 > 0.
and
¯𝑖
𝐻
— постоянные
затухающая функция,
Л е м м а 4.1 Функция 𝑤(𝑥,
ˆ 𝑡) удовлетворяет уравнению в частных производных (4.22),(4.23).
Доказательство
по времени
𝑡
л е м м ы 4.1. Продифференцируем (4.13)
и по пространственному аргументу
𝑥
ˆ 1 (𝑡) − 𝐾𝐵𝑢(𝑥, 𝑡)
𝑤
ˆ𝑥 (𝑥, 𝑡) = 𝑢𝑥 (𝑥, 𝑡) − 𝑣𝑥 (𝑥, 𝑡) − 𝐾𝐴𝑒𝐴𝑥 𝑋
∫︁ 𝑥
− 𝐾𝑒𝐴ℎ 𝐿˜
𝑦 (𝑥, 𝑡) − 𝐾𝐴
𝑒𝐴(𝑥−𝑧) 𝐵𝑢(𝑧, 𝑡)𝑑𝑧
0
∫︁
ℎ
+ 𝐾𝐴
𝑒𝐴(𝑥+ℎ−𝑧) 𝐿˜
𝑦 (𝑧, 𝑡)𝑑𝑧.
(4.25)
𝑥
ˆ˙ 1 (𝑡)
𝑤
ˆ𝑡 (𝑥, 𝑡) = 𝑢𝑡 (𝑥, 𝑡) − 𝑣𝑡 (𝑥, 𝑡) − 𝐾𝑒𝐴𝑥 𝑋
∫︁ 𝑥
∫︁
−𝐾
𝑒𝐴(𝑥−𝑧) 𝐵𝑢𝑡 (𝑧, 𝑡)𝑑𝑧 + 𝐾
0
ℎ
𝑒𝐴(𝑥+ℎ−𝑧) 𝐿˜
𝑦𝑡 (𝑧, 𝑡)𝑑𝑧
𝑥
ˆ 1 (𝑡) − 𝐾𝑒𝐴𝑥 𝐵𝑢(0, 𝑡)
= 𝑢𝑥 (𝑥, 𝑡) − 𝑣𝑥 (𝑥, 𝑡) − 𝐾𝐴𝑒𝐴𝑥 𝑋
− 𝐾𝑒𝐴𝑥 𝐿˜
𝑦 (ℎ, 𝑡) − 𝐾𝐵𝑢(𝑥, 𝑡) + 𝐾𝑒𝐴𝑥 𝐵𝑢(0, 𝑡) + 𝐾𝑒𝐴𝑥 𝐿˜
𝑦 (ℎ, 𝑡)
∫︁ 𝑥
− 𝐾𝑒𝐴𝐷 𝐿˜
𝑦 (𝑥, 𝑡) − 𝐾𝐴
𝑒𝐴(𝑥−𝑧) 𝐵𝑢(𝑧, 𝑡)𝑑𝑧
0
∫︁
ℎ
+ 𝐾𝐴
𝑥
𝑒𝐴(𝑥+ℎ−𝑧) 𝐿˜
𝑦 (𝑧, 𝑡)𝑑𝑧
4.2. Алгоритм стабилизации неустойчивого объекта
101
ˆ 1 (𝑡) − 𝐾𝐵𝑢(𝑥, 𝑡)
= 𝑢𝑥 (𝑥, 𝑡) − 𝑣𝑥 (𝑥, 𝑡) − 𝐾𝐴𝑒𝐴𝑥 𝑋
∫︁ 𝑥
− 𝐾𝑒𝐴ℎ 𝐿˜
𝑦 (𝑥, 𝑡) − 𝐾𝐴
𝑒𝐴(𝑥−𝑧) 𝐵𝑢(𝑧, 𝑡)𝑑𝑧
0
∫︁
ℎ
+ 𝐾𝐴
𝑒𝐴(𝑥+ℎ−𝑧) 𝐿˜
𝑦 (𝑧, 𝑡)𝑑𝑧
𝑥
=𝑤
ˆ𝑥 (𝑥, 𝑡).
(4.26)
Таким образом, функция
𝑤(𝑥,
ˆ 𝑡)
удовлетворяет уравнению в част-
ных производных, описывающему временное запаздывание.
Выберем функцию управления с учетом (4.6) и (4.13) так, чтобы
𝑤(ℎ,
ˆ 𝑡)
равнялась нулю
𝑈 (𝑡) = 𝑢(ℎ, 𝑡)
ˆ 1 (𝑡) + 𝐾
= 𝑣(ℎ, 𝑡) + 𝐾𝑒𝐴ℎ 𝑋
∫︁
ℎ
𝑒𝐴(ℎ−𝑧) 𝐵𝑢(𝑧, 𝑡)𝑑𝑧,
(4.27)
0
𝑤(ℎ,
ˆ 𝑡) = 0.
(4.28)
Лемма 4.1 доказана.
Подставляя
𝑥=0
в (4.13), получим
ˆ −𝐾
𝑢(0, 𝑡) = 𝑣(0, 𝑡) + 𝑤(0,
ˆ 𝑡) + 𝐾 𝑋(𝑡)
∫︁
ℎ
𝑒𝐴(ℎ−𝑧) 𝐿˜
𝑦 (𝑧, 𝑡)𝑑𝑧.
(4.29)
0
После подстановки (4.29) в (4.1) имеем
˙
𝑋(𝑡)
ˆ + ∆(𝑡) + 𝐵 𝑤(0,
= 𝐴𝑋(𝑡) + 𝐵𝑣(0, 𝑡) + 𝐵𝐾 𝑋(𝑡)
ˆ 𝑡)
∫︁ ℎ
−𝐵𝐾
𝑒𝐴(ℎ−𝑧) 𝐿˜
𝑦 (𝑧, 𝑡)𝑑𝑧
0
=
˜
(𝐴 + 𝐵𝐾)𝑋(𝑡) + 𝐵𝑣(0, 𝑡) + 𝐵 𝑤(0,
ˆ 𝑡) + ∆(𝑡) − 𝐵𝐾 𝑋(𝑡)
∫︁ ℎ
−𝐵𝐾
𝑒𝐴(ℎ−𝑧) 𝐿˜
𝑦 (𝑧, 𝑡)𝑑𝑧.
(4.30)
0
Введем в рассмотрение функции
𝛿1 (𝑡)
𝛿2 (𝑡)
˜ 1 (𝑡),
= 𝐾𝑋
∫︁ ℎ
= 𝐾
𝑒𝐴(ℎ−𝑧) 𝐿˜
𝑦 (𝑧, 𝑡)𝑑𝑧.
0
(4.31)
(4.32)
102
Глава 4. Неустойчивые объекты с запаздыванием
Л е м м а 4.2 Функции 𝛿1 (𝑡) и 𝛿2 (𝑡), определенные в (4.31), (4.32),
являются мультигармоническими с дополнительными экспоненциально затухающими составляющими:
𝛿1 (𝑡)
= 𝜎1 +
𝑘
∑︁
(𝜗1𝑖 sin(𝜔𝑖 𝑡) + 𝜍1𝑖 cos(𝜔𝑖 𝑡)) + 𝜀1 (𝑡),
(4.33)
(𝜗2𝑖 sin(𝜔𝑖 𝑡) + 𝜍2𝑖 cos(𝜔𝑖 𝑡)) + 𝜀2 (𝑡),
(4.34)
𝑖=1
𝛿2 (𝑡)
= 𝜎2 +
𝑘
∑︁
𝑖=1
где 𝜎1 , 𝜗1𝑖 , 𝜍1𝑖 , 𝜎2 , 𝜗2𝑖 , 𝜍2𝑖 — кнстанты, 𝜀1 (𝑡) и 𝜀2 (𝑡) — экспоненциально затухающие функции.
Д о к а з а т е л ь с т в о л е м м ы 4.2. Переходя к образам Лапаласа в (4.11), выделим вектор состояния модели ошибки наблюдателя
˜ 1 (𝑠)
𝑋
где
˜ 1 (0)
𝑋
[︁
]︁
˜ 1 (0) ,
(𝑠𝐼 − (𝐴 − 𝐿𝐶))−1 ∆(𝑠) + 𝑋
=
означает начальные условия
(4.35)
˜ 1 (𝑡).
𝑋
Используя (4.12), (4.31) и (4.35), получим изображение по Лапласу для
𝛿1 (𝑡)
и
𝑌˜ (𝑡)
[︁
]︁
˜ 1 (0) ,
= 𝐾(𝑠𝐼 − (𝐴 − 𝐿𝐶))−1 ∆(𝑠) + 𝑋
[︁
]︁
˜ 1 (0) .
= 𝐶(𝑠𝐼 − (𝐴 − 𝐿𝐶))−1 ∆(𝑠) + 𝑋
𝛿1 (𝑠)
𝑌˜1 (𝑠)
Из (4.3) имеем выражение для
(4.36)
(4.37)
∆(𝑠)
𝑘
∆(𝑠) = 𝐸
Так как матрица
1 ∑︁
𝜔𝑖
𝑠
+ 𝐻𝑖 2
.
+
𝐺𝑖
𝑠 𝑖=1 𝑠2 + 𝜔𝑖2
𝑠 + 𝜔𝑖2
𝐴 − 𝐿𝐶
(4.38)
гурвицева, после обратного преобразова-
ния Лапласа (4.36)-(4.38) получим (4.33) и
𝑌˜1 (𝑡)
=
𝜎3 +
𝑘
∑︁
(𝜗3𝑖 sin(𝜔𝑖 𝑡) + 𝜍3𝑖 cos(𝜔𝑖 𝑡)) + 𝜀𝑦˜(𝑡),
(4.39)
𝑖=1
где
𝜎3 , 𝜗3𝑖 , 𝜍3𝑖
функция.
— константы,
𝜀3 (𝑡)
— экспоненциально затухающая
4.2. Алгоритм стабилизации неустойчивого объекта
103
З а м е ч а н и е 4.1 Так как функция 𝜀3 (𝑡) — результат переходного процесса в устойчивой линейной системе с гурвицевой матрицей состояния, то эта функция может быть представлена в
виде суммы затухающих экспонент, умноженных на константы,
полиномиальные или синусоидальные функции времени. Следовательно, производные этой функции также экспоненциально затухают.
𝛿2 (𝑡)
Рассмотрим функцию
с учетом (4.14), (4.32) и (4.39)
ℎ
∫︁
𝑒𝐴(ℎ−𝑧) 𝐿˜
𝑦 (𝑧, 𝑡)𝑑𝑧+
𝛿2 (𝑡) = 𝐾
0
ℎ
∫︁
𝑒𝐴(ℎ−𝑧) 𝐿𝜎3 𝑑𝑧+
=𝐾
+
0
𝑘
∑︁
𝑘
∑︁
𝑒𝐴(ℎ−𝑧) 𝐿𝜗3𝑖 sin(𝜔𝑖 (𝑡 + 𝑧 − ℎ))𝑑𝑧
𝐾
0
𝑖=1
+
ℎ
∫︁
ℎ
∫︁
𝐾
0
𝑖=1
∫︁
𝑒𝐴(ℎ−𝑧) 𝐿𝜍3𝑖 cos(𝜔𝑖 (𝑡 + 𝑧 − ℎ))𝑑𝑧
ℎ
+𝐾
0
𝑒𝐴(ℎ−𝑧) 𝐿𝜀3 (𝑡 + 𝑧 − ℎ)𝑑𝑧.
(4.40)
Анализируя интегралы в (4.40), находим, что правая часть уравнения является суммой константы, ограниченной гармонической
функции с частотой
𝜔𝑖
и экспоненциально затухающей функцией
времени. Таким образом,
𝛿2 (𝑡)
имеет вид (4.34), где
ℎ
∫︁
𝜎2 = 𝐾
𝑒𝐴(ℎ−𝑧) 𝐿𝜎3 𝑑𝑧,
(4.41)
𝑒𝐴(ℎ−𝑧) 𝐿 (𝜗3𝑖 cos(𝜔𝑖 (𝑧−ℎ))−𝜍3𝑖 sin(𝜔𝑖 (𝑧−ℎ))) 𝑑𝑧,
(4.42)
𝑒𝐴(ℎ−𝑧) 𝐿 (𝜗3𝑖 sin(𝜔𝑖 (𝑧−ℎ))+𝜍3𝑖 cos(𝜔𝑖 (𝑧−ℎ))) 𝑑𝑧,
(4.43)
𝑒𝐴(ℎ−𝑧) 𝐿𝜀3 (𝑡 + 𝑧 − ℎ)𝑑𝑧.
(4.44)
0
ℎ
∫︁
𝜗2𝑖 = 𝐾
0
∫︁
ℎ
𝜍2𝑖 = 𝐾
0
∫︁
𝜀2 = 𝐾
0
ℎ
104
Глава 4. Неустойчивые объекты с запаздыванием
Этот факт объясняется тем, что интервал интегрирования конечен, откуда следует, что функции
𝜎2 , 𝜗2𝑖 , 𝜍2𝑖
ограниченны, а также
они не зависят от времени.
Перепишем (4.30) следующим образом
˙
𝑋(𝑡)
𝑌 (𝑡)
=
=
(𝐴 + 𝐵𝐾)𝑋(𝑡) + 𝐵𝑣(0, 𝑡) + ∆(𝑡)
+𝐵 𝑤(0,
ˆ 𝑡) − 𝐵𝛿1 (𝑡) − 𝐵𝛿2 (𝑡),
𝐶𝑋(𝑡).
(4.45)
(4.46)
Используя лемму 4.1, лемму 4.2 и (4.19), перепишем уравнение
объекта (4.1) в виде
˙
¯
𝑋(𝑡)
= (𝐴 + 𝐵𝐾)𝑋(𝑡) + 𝐵𝑉 (𝑡 − 𝐷) + ∆(𝑡)
+ 𝐵 𝑤(0,
ˆ 𝑡) + 𝐵𝜀(𝑡).
(4.47)
Таким образом, получена устойчивая система вида (4.18), (4.24)
где
¯ = 𝐸 − 𝐵𝜎1 − 𝐵𝜎2 ,
𝐸
¯ 𝑖 = 𝐻𝑖 − 𝐵𝜍1𝑖 − 𝐵𝜍2𝑖 ,
𝐻
¯ 𝑖 = 𝐺𝑖 − 𝐵𝜗1𝑖 − 𝐵𝜗2𝑖 ,
𝐺
𝜀(𝑡) = −𝜀1 (𝑡) − 𝜀2 (𝑡).
(4.48)
(4.49)
Мы показали, что регулятор (4.17) преобразует исходную систему в устойчивую (𝐾 выбирается из условия гурвицевости матрицы
𝐴+𝐵𝐾 ) с новым запаздывающим управлением 𝑉 (𝑡−𝐷). Новое воз¯ — неизвестная мультигармоническая функция, новое
∆
входное возмущение 𝐵 𝑤(0,
ˆ 𝑡) представляет собой эффект начальных условий и стремится к нулю за ℎ секунд. Компонента 𝐵𝜀(𝑡) —
мущение
экспоненциально затухающая функция.
Будем использовать модель (4.47), (4.2) для синтеза алгоритма компенсации возмущающего воздействия, реализуемого за счет
нового входного сигнала
4.3
Алгоритм
𝑉 (𝑡).
адаптивной
идентифика-
ции частот и наблюдатель гармоник
мультигармонического возмущения
После того, как был получен алгоритм стабилизации неустойчивого объекта с запаздыванием, можно перейти к синтезу алгорит-
4.3. Идентификация параметров возмущения
105
ма компенсации возмущения. Для этого сначала требуется построить адаптивный наблюдатель возмущающего воздействия, включая
схему идентификации частот всех гармоник.
Рассмотрим наблюдатель
ˆ˙ 2 (𝑡) = (𝐴 + 𝐵𝐾)𝑋
ˆ 2 (𝑡) + 𝐵𝑉 (𝑡 − 𝐷) ,
𝑋
ˆ 2 (𝑡) .
𝑌ˆ2 (𝑡) = 𝐶 𝑋
(4.50)
(4.51)
˜2 = 𝑌 − 𝑌ˆ2 , где 𝑌ˆ2 — выходная
Т е о р е м а 4.1 Сигнал невязки 𝑌
переменная наблюдателя (4.50), (4.51), 𝑌 — выходная переменная
замкнутого контура (4.1), (4.2), (4.17), имеет вид
𝑌˜2 (𝑡) = 𝜎4 +
𝑘
∑︁
𝜇4𝑖 sin(𝜔𝑖 𝑡 + 𝜑4𝑖 ) + 𝜀4 (𝑡),
(4.52)
𝑖=1
где 𝜎4 , 𝜇4𝑖 и 𝜑4𝑖 — константы, 𝜀4 (𝑡) и ее производные ограничены
экспоненциально сходящейся функцией.
Д о к а з а т е л ь с т в о т е о р е м ы 4.1. Невязка
влетворяет уравнению
˜2 = 𝑋 − 𝑋
ˆ2
𝑋
˜˙ 2 (𝑡) = (𝐴 + 𝐵𝐾)𝑋
˜ 2 (𝑡) + ∆(𝑡)
¯
𝑋
+ 𝐵 𝑤(0,
ˆ 𝑡) + 𝐵𝜀(𝑡).
удо-
(4.53)
Рассмотрим вспомогательную систему
˜˙ 𝑎 (𝑡) = (𝐴 + 𝐵𝐾)𝑋
˜ 𝑎 (𝑡) + ∆(𝑡)
¯
𝑋
+ 𝐵𝜀(𝑡) .
Так как матрица
(4.54)
¯ — мультигармоническая
(𝐴 + 𝐵𝐾) гурвицева, и ∆
функция, нетрудно видеть, что выходная переменная этой системы
имеет вид
˜ 𝑎 (𝑡) = 𝜎4 +
𝑌˜𝑎 (𝑡) = 𝐶 𝑋
𝑘
∑︁
𝜇4𝑖 sin(𝜔𝑖 𝑡 + 𝜑4𝑖 ) + 𝜀0 (𝑡),
(4.55)
𝑖=1
где
𝜎4 , 𝜇4𝑖
и
𝜑4𝑖
— константы, и
𝜀0 (𝑡)
ограничена экспоненциально
затухающей функцией.
Для ошибки
˜𝑒 = 𝑋
˜2 − 𝑋
˜𝑎
𝑋
имеем
˜˙ 𝑒 (𝑡) = (𝐴 + 𝐵𝐾)𝑋
˜ 𝑒 (𝑡) + 𝐵 𝑤(0,
𝑋
ˆ 𝑡).
(4.56)
106
Глава 4. Неустойчивые объекты с запаздыванием
Как и в [70, 90] рассмотрим функцию Ляпунова
˜ 𝑒𝑇 (𝑡)𝑃 𝑋
˜ 𝑒 (𝑡) + 𝛾
𝒱(𝑡) = 𝑋
2
где
𝑃 = 𝑃𝑇 > 0
∫︁
ℎ
(1 + 𝑥)𝑤(𝑥,
ˆ 𝑡)2 𝑑𝑥,
— решение уравнения Ляпунова
𝑃 (𝐴 + 𝐵𝐾) + (𝐴 + 𝐵𝐾)𝑇 𝑃 = −𝑄
для некоторого
(4.57)
0
𝑄 + 𝑄𝑇 > 0,
и параметр
𝛾 > 0,
(4.58)
который будет
выбран далее при анализе. Имеем
˙
˜ 𝑒𝑇 (𝑡)(𝑃 (𝐴 + 𝐵𝐾)𝑇 + (𝐴 + 𝐵𝐾)𝑃 )𝑋
˜ 𝛿 (𝑡)
𝒱(𝑡)
=𝑋
∫︁ ℎ
𝛾
𝛾
˜ 𝑒𝑇 (𝑡)𝑃 𝐵 𝑤(0,
+ 2𝑋
ˆ 𝑡) − 𝑤(0,
ˆ 𝑡)2 −
𝑤(𝑥,
ˆ 𝑡)2 𝑑𝑥,
2
2 0
∫︁ ℎ
⃒
⃒2
˜ 𝑇 (𝑡)𝑄𝑋
˜ 𝑒 (𝑡) + 2 ⃒⃒𝑋
˜ 𝑇 (𝑡)𝑃 𝐵 ⃒⃒ − 𝛾
6 −𝑋
𝑤(𝑥,
ˆ 𝑡)2 𝑑𝑥.
𝑒
𝑒
𝛾
2 0
(4.59)
Пусть
𝛾=
где
𝜆𝑚𝑎𝑥
и
𝜆𝑚𝑖𝑛
4𝜆𝑚𝑎𝑥 (𝑃 𝐵𝐵 𝑇 𝑃 )
,
𝜆𝑚𝑖𝑛 (𝑄)
(4.60)
— максимальное и минимальное собственные числа
соответствующих матриц. Тогда
∫︁ ℎ
⃦2 2𝜆
𝑇
𝜆𝑚𝑖𝑛 (𝑄) ⃦
⃦˜
⃦
𝑚𝑎𝑥 (𝑃 𝐵𝐵 𝑃 )
˙
𝑤(𝑥,
ˆ 𝑡)2 𝑑𝑥
𝒱(𝑡)
6−
⃦𝑋𝑒 (𝑡)⃦ −
2
𝜆𝑚𝑖𝑛 (𝑄)
0
∫︁ ℎ
⃦2 2𝜆
𝑇
𝜆𝑚𝑖𝑛 (𝑄) ⃦
⃦˜
⃦
𝑚𝑎𝑥 (𝑃 𝐵𝐵 𝑃 )
6−
(1 + 𝑥)𝑤(𝑥,
ˆ 𝑡)2 𝑑𝑥
⃦𝑋𝑒 (𝑡)⃦ −
2
(1 + ℎ)𝜆𝑚𝑖𝑛 (𝑄) 0
∫︁ ℎ
⃦2
𝜆𝑚𝑖𝑛 (𝑄) ⃦
𝛾
⃦˜
⃦
=−
(1 + 𝑥)𝑤(𝑥,
ˆ 𝑡)2 𝑑𝑥
⃦𝑋𝑒 (𝑡)⃦ −
2
2(1 + ℎ) 0
6 −𝐶1 𝒱(𝑡),
(4.61)
{︁
}︁
𝜆𝑚𝑖𝑛 (𝑄)
1
где 𝐶1 = min
2𝜆𝑚𝑎𝑥 (𝑃 ) , 1+ℎ .
˜𝑒 = 𝐶 𝑋
˜ 𝑒 экспоненциально затухает. Так как
Таким образом, 𝑌
𝑌2 (𝑡) = 𝑌˜𝑎 (𝑡) + 𝑌˜𝑒 (𝑡),
4.3. Идентификация параметров возмущения
то с учетом (4.55) имеем (4.52), где
𝜀4 (𝑡)
107
состоит из затухающих
ℎ секунд)
𝜀4 (𝑡) и ее производные экспоненциально затухают.
экспонент, умноженных на полиномы и синусоиды (после
и таким образом,
Как и в главе 2 для построения адаптивного идентификатора частот мультигармонического сигнала
𝑌˜ (𝑡)
будем использовать
дифференциальное уравнение вида
𝑝(𝑝2 − 𝜃1 )(𝑝2 − 𝜃2 )· · · (𝑝2 − 𝜃𝑘 )𝑌˜ (𝑡) = 0,
где
𝑝 = 𝑑/𝑑𝑡
— оператор дифференцирования,
𝜃𝑖 = −𝜔𝑖2
(4.62)
— постоян-
ные параметры. Мы пренебрегли наличием экспоненциальной затухающей функцией
𝜀˜(𝑡),
которая не влияет на устойчивость работы
алгоритма идентификации частот, что показано в главе 2. Перепишем уравнение (4.62):
𝑝2𝑘+1 𝑌˜ (𝑡) = 𝜃¯1 𝑝2𝑘−1 𝑌˜ (𝑡) +· · · + 𝜃¯𝑘−1 𝑝3 𝑌˜ (𝑡) + 𝜃¯𝑘 𝑝𝑌˜ (𝑡),
(4.63)
где параметры, полученные после раскрытия скобок в (4.62) определяются системой:
⎧
𝜃¯1 = 𝜃1 + 𝜃2 +· · · + 𝜃𝑘 ,
⎪
⎪
⎪
⎨ 𝜃¯2 = −𝜃1 𝜃2 − 𝜃1 𝜃3 −· · · − 𝜃𝑘−1 𝜃𝑘 ,
.
.
⎪
.
⎪
⎪
⎩ ¯
𝜃𝑘 = (−1)𝑘+1 𝜃1 𝜃2 · · · 𝜃𝑘 .
(4.64)
Как и в главах 2, 3 рассмотрим линейный фильтр вида
[︂
𝜉(𝑡)
=
]︂
𝜆2𝑘
𝑌˜ (𝑡).
(𝑝 + 𝜆)2𝑘
(4.65)
108
Глава 4. Неустойчивые объекты с запаздыванием
Перепишем (4.65) в форме вход-состояние-выход:
⎧
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎨
𝜁˙1 (𝑡) = 𝜁2 (𝑡),
𝜁˙2 (𝑡) = 𝜁3 (𝑡),
.
.
.
𝜁˙2𝑘 (𝑡) = 𝜆2𝑘 𝑌˜ (𝑡) − 𝑞1 𝜁1 − · · · − 𝑞2𝑘 𝜁2𝑘 ,
𝜉(𝑡) = 𝜁1 (𝑡),
(4.66)
⎪
.
⎪
.
⎪
⎪
.
⎪
⎪
⎪
⎪
𝜉 (𝑙) = 𝜁𝑙+1 (𝑡),
⎪
⎪
⎪
.
⎪
⎪
.
⎪
.
⎪
⎪
⎩ (2𝑘)
𝜉
= 𝜆2𝑘 𝑌˜ (𝑡) − 𝑞1 𝜁1 − · · · − 𝑞2𝑘 𝜁2𝑘 ,
где числа
𝑞1 , 𝑞2 , . . . , 𝑞2𝑘
соответствуют коэффициентам полинома
(𝑝 + 𝜆)2𝑘 = 𝑝2𝑘 + 𝑞2𝑘 𝑝2𝑘−1 + · · · + 𝑞2 𝑝 + 𝑞1 .
(4.67)
Далее представлен адаптивный алгоритм идентификации параметров вектора
Θ̄,
содержащего значения частот
𝜔𝑖 .
Алгоритм
адаптации вида
ˆ (𝑡)
Θ̄
Υ(𝑡) + 𝐾Ω(𝑡)𝜉 (2𝑘) (𝑡),
(4.68)
𝑇
(2𝑘)
ˆ
Υ̇(𝑡) = −𝐾Ω(𝑡)Ω (𝑡)Θ̄(𝑡) − 𝐾 Ω̇(𝑡)𝜉
(𝑡),
(4.69)
[︂
]︂
2𝑘
𝜆
𝜉(𝑡) =
𝑌˜ (𝑡).
(4.70)
(𝑝 + 𝜆)2𝑘
[︀ (2𝑘−1)
]︀
𝑇
𝑇
(3)
(1)
где Ω (𝑡) =
— регрессор, Θ̄
=
𝜉
(𝑡)
.
.
.
𝜉
(𝑡)
𝜉
(𝑡)
[︀
]︀
¯
¯
¯
𝜃1 . . . 𝜃𝑘−1 𝜃𝑘 — вектор неизвестных параметров, 𝐾 =
diag{𝑘𝑖 > 0}, обеспечивает сходимость к нулю ошибки оценивания
˜ (𝑡) = Θ̄ − Θ̄
ˆ (𝑡):
Θ̄
⃒
⃒
⃒
ˆ (𝑡)⃒⃒ = 0.
lim ⃒Θ̄ − Θ̄
(4.71)
=
𝑡→∞
Доказательство эффективности алгоритма (4.68)–(4.70) и выполнение цели (4.71) представлено в главе 2.
В соответствие с замечанием 2.4, в дальнейшем будем считать,
что на основе вектора оценок
метров
𝜃𝑖 .
𝜃¯𝑖
измерению доступны оценки пара-
Частоты мультигармонического возмущения найдем из
4.4. Компенсация мультигармонического возмущения
109
(4.62)
√︂⃒
⃒
⃒
⃒
𝜔
ˆ 𝑖 (𝑡) = ⃒𝜃ˆ𝑖 (𝑡)⃒.
(4.72)
В силу выполнения целевого условия (4.71) и результата, полученного в предыдущей главе (2.35) и (2.36), имеем предельное
соотношение для частот
lim |𝜔𝑖 − 𝜔
ˆ 𝑖 (𝑡)| = 0.
𝑡→∞
4.4
(4.73)
Алгоритм компенсации мультигармонического возмущения, действующего на неустойчивый объект управления с запаздыванием
В этом разделе представлен закон управления, обеспечивающий
полную компенсацию влияния возмущения на выходную переменную объекта. Алгоритм синтезируется также как и в разделе 3.1.
Из (4.50)–(4.52) имеем для выходной переменной объекта
[︂
𝑌 (𝑡) =
𝜀4
]︂
𝑘
∑︁
𝑏(𝑝)
𝑉 (𝑡 − 𝐷) + 𝜎4 +
𝜇4𝑖 sin(𝜔𝑖 𝑡 + 𝜑4𝑖 ) + 𝜀4 (𝑡) ,
𝑎(𝑝)
𝑖=1
(4.74)
𝑝 = 𝑑/𝑑𝑡 — оператор
𝑎(𝑝) = 𝑝𝑛 +𝑎𝑛−1 𝑝𝑛−1 +· · ·+𝑎1 𝑝+𝑎0
𝑏(𝑝) = 𝑏𝑚 𝑝𝑚 + · · · + 𝑏1 𝑝 + 𝑏0 , 𝑚 ≤ 𝑛 — результат преобразования
где
экспоненциально стремится к нулю,
дифференцирования и полиномы
и
𝑏(𝑝)
= 𝐶(𝑝𝐼 − (𝐴 + 𝐵𝐾))−1 𝐵,
𝑎(𝑝)
причем полином
𝑎(𝑝)
(4.75)
гурвицев.
Для реализации разработанного метода компенсации возмущения необходимо ввести следующее допущение.
Д о п у щ е н и е 4.3
оси.
Полином 𝑏(𝑠) не имеет корней на мнимой
110
Глава 4. Неустойчивые объекты с запаздыванием
Так как фильтр (4.65) линейный, то реакция на мультигармоническое воздействие будет также мультигармонической функцией
с теми же частотами. Так как полином
(𝑠 + 𝜆)2𝑘
гурвицев, то для
входного сигнала (4.52) выходная переменная фильтра (4.65) имеет
вид
𝜉(𝑡)
= 𝜎𝜉 +
𝑘
∑︁
𝜇𝜉𝑖 sin(𝜔𝑖 𝑡 + 𝜑𝜉𝑖 ) + 𝜀𝜉 (𝑡),
(4.76)
𝑖=1
где
𝜎𝜉
— смещение,
вый сдвиг
𝑖-ой
𝜇𝜉𝑖
— амплитуда
гармоники и
𝜀𝜉 (𝑡)
𝑖-ой
гармоники,
𝜑𝜉𝑖
— фазо-
— экспоненциально затухающая
функция с экспоненциально затухающими производными.
Для доказательства работоспособности алгоритма компенсации
удобно предварительно рассмотреть так называемый “идеальный”
закон управления, предполагающий знание всех параметров функции возмущения и обеспечивающий решение поставленной задачи
(см. лемму 3.1).
Закон управления
(︂
)︂
𝑘
∑︁
1
1
𝜙𝑖 + 𝜙𝜉𝑖
¯
𝑉 (𝑡) = − 𝜉0 (𝑡 + ℎ) −
𝜉𝑖 𝑡 + ℎ −
,
𝐿0
𝐿𝐿
𝜔𝑖
𝑖=1 𝑖 𝜉𝑖
(4.77)
где
⃒
⃒
⃒ 𝑏(𝑗𝜔𝑖 ) ⃒
𝑏0
⃒ , 𝜙𝑖 = arg 𝑏(𝑗𝜔𝑖 ) ,
, 𝐿𝑖 = ⃒⃒
𝑎0
𝑎(𝑗𝜔𝑖 ) ⃒
𝑎(𝑗𝜔𝑖 )
⃒
⃒
2
2
⃒
⃒
𝜆
𝜆
⃒ , 𝜙𝜉𝑖 = arg
𝐿𝜉𝑖 = ⃒⃒
,
(𝑗𝜔𝑖 + 𝜆)2 ⃒
(𝑗𝜔𝑖 + 𝜆)2
𝐿0 =
обеспечивает сходимость к нулю выходной переменной
(4.78)
(4.79)
𝑌 (𝑡)
и вы-
полнение цели (4.4).
В самом деле, подставляя (4.77) в (4.74) и учитывая результат
леммы 3.1, имеем
[︂
𝑌 (𝑡)
=
𝑏(𝑝)
𝑎(𝑝)
+𝜎 +
]︂ (︃
𝑘
∑︁
(︂
)︂
𝑘
∑︁
1
1
𝜙𝑖 + 𝜙𝜉𝑖
− 𝜎−
𝜉𝑖 𝑡 −
𝐿0
𝐿𝐿
𝜔𝑖
𝑖=1 𝑖 𝜉𝑖
)︃
𝛿𝑖 (𝑡) + 𝜀(𝑡)
𝑖=1
=
𝜀2 (𝑡),
(4.80)
4.4. Компенсация мультигармонического возмущения
где
𝜀2 (𝑡)
111
— экспоненциально затухающая функция, откуда следует
выполнение цели (4.4).
Однако закон управления (4.77) физически не реализуем, так
как содержит неизвестные и недоступные для измерения функции
и упредительные оценки функций времени. В случае постоянного
сигнала предсказывание не представляет проблему, так как такая
функция не зависит от времени, что нельзя сказать о гармонической функции. В лемме 3.2 показана схема получения упредительной оценки гармонического сигнала.
Далее представлены наблюдатели переменных
𝜉0 (𝑡), 𝜉𝑖 (𝑡) и 𝜉˙𝑖 (𝑡).
Как и в главе 2 мы пренебрегаем экспоненциально затухающей составляющей
𝜀𝜉 (𝑡) и дифференцируем (2.91) 2𝑘 раз. Затем получаем
𝑘 линейных уравнений (2.95) и (2.96) или два мат-
две системы из
ричных уравнения (2.97) и (2.98), откуда имеем
⎤ ⎡
𝜃1
𝜉1 (𝑡)
⎢ 𝜉2 (𝑡) ⎥ ⎢𝜃12
⎢
⎥ ⎢
⎢ ..
⎥ = ⎢ ..
⎣ .
⎦ ⎣.
𝜉𝑘 (𝑡)
𝜃1𝑘
⎡
⎡ ˙
𝜉1 (𝑡)
⎢ 𝜉˙2 (𝑡)
⎢
⎢ .
⎣ ..
𝜉˙𝑘 (𝑡)
⎤
⎡
1
⎥ ⎢ 𝜃1
⎥ ⎢
⎥ = ⎢ ..
⎦ ⎣ .
𝜃1𝑘−1
𝜃2 · · ·
𝜃22 · · ·
.
.
.
..
.
𝜃2𝑘 · · ·
1
𝜃2
.
.
.
···
···
..
.
𝜃2𝑘−1 · · ·
⎤−1 ⎡ (2)
𝜉 (𝑡)
𝜃𝑘
⎢ 𝜉 (4) (𝑡)
𝜃𝑘2 ⎥
⎥ ⎢
⎢ ..
. ⎥
. ⎦
⎣ .
.
𝑘
𝜃𝑘
𝜉 (2𝑘) (𝑡)
⎤
⎥
⎥
⎥,
⎦
(4.81)
⎤−1 ⎡ (1)
1
𝜉 (𝑡)
⎢ 𝜉 (3) (𝑡)
𝜃𝑘 ⎥
⎥ ⎢
⎢ ..
. ⎥
. ⎦
⎣ .
.
𝜃𝑘𝑘−1
⎤
⎥
⎥
⎥.
⎦
(4.82)
𝜉 (2𝑘−1) (𝑡)
З а м е ч а н и е 4.2 Обратные матрицы в (4.81) и (4.82) существуют, так как в силу постановки задачи возмущающее воздействие ∆(𝑡) имеет 𝑘 гармоник различной частоты.
Реализуемый алгоритм оценки переменных
𝜉𝑖 (𝑡)
и
𝜉˙𝑖 (𝑡)
примет
вид:
⎡ ˆ
𝜉1 (𝑡)
⎢ 𝜉ˆ2 (𝑡)
⎢
⎢ .
⎣ ..
𝜉ˆ𝑘 (𝑡)
⎡ˆ
𝜃1
⎥ ⎢𝜃ˆ2
⎥ ⎢ 1
⎥=⎢.
⎦ ⎣ ..
𝜃ˆ𝑘
⎤
1
𝜃ˆ2 · · ·
𝜃ˆ22 · · ·
.
.
.
..
.
𝜃ˆ2𝑘 · · ·
⎤−1 ⎡ (2)
𝜃ˆ𝑘
𝜉 (𝑡)
⎢ 𝜉 (4) (𝑡)
𝜃ˆ𝑘2 ⎥
⎥ ⎢
⎢ ..
. ⎥
. ⎦
⎣ .
.
𝑘
ˆ
𝜉 (2𝑘) (𝑡)
𝜃𝑘
⎤
⎥
⎥
⎥.
⎦
(4.83)
112
Глава 4. Неустойчивые объекты с запаздыванием
⎤
⎡
ˆ
𝜉˙1 (𝑡)
1
⎢ ˆ
⎥
⎢ 𝜉˙ (𝑡) ⎥ ⎢ 𝜃ˆ1
⎢ 2
⎥ ⎢
⎥ = ⎢ ..
⎢ .
⎢ ..
⎥ ⎣ .
⎣
⎦
ˆ˙
𝜃ˆ1𝑘−1
𝜉𝑘 (𝑡)
⎡
1
𝜃ˆ2
.
.
.
⎤−1 ⎡ (1)
1
𝜉 (𝑡)
⎢ 𝜉 (3) (𝑡)
𝜃ˆ𝑘 ⎥
⎥ ⎢
⎢ ..
. ⎥
. ⎦
⎣ .
.
𝑘−1
ˆ
𝜉 (2𝑘−1) (𝑡)
𝜃𝑘
···
···
..
.
𝜃ˆ2𝑘−1 · · ·
⎤
⎥
⎥
⎥.
⎦
(4.84)
Наблюдатель общего смещения получим на основе (3.27):
𝜉ˆ0 (𝑡)
= 𝜉(𝑡) −
𝑘
∑︁
𝜉ˆ𝑖 (𝑡).
(4.85)
𝑖=1
Так как выполнены соотношения (4.71), (4.73), то из (4.81)–
(4.85) имеем
⃒
⃒
⃒
⃒
lim ⃒𝜉0 (𝑡) − 𝜉ˆ0 (𝑡)⃒
𝑡→∞
⃒
⃒
⃒
⃒
lim ⃒𝜉𝑖 (𝑡) − 𝜉ˆ𝑖 (𝑡)⃒
𝑡→∞
⃒
⃒
⃒
ˆ ⃒
lim ⃒𝜉˙𝑖 (𝑡) − 𝜉˙𝑖 (𝑡)⃒
𝑡→∞
=
0,
(4.86)
=
0,
(4.87)
=
0.
(4.88)
В следующем утверждении представлен реализуемый алгоритм
компенсации параметрически не определенного возмущающего воздействия для нелинейного объекта управления с запаздыванием.
Рассмотрим объект управления
первый наблюдатель (4.8), (4.9) и закон управления
У т в е р ж д е н и е 4.1
(4.2),
[︂
∫︁
ˆ 1 (𝑡) +
𝑈 (𝑡) = 𝑉 (𝑡) + 𝐾 𝑒𝐴ℎ 𝑋
𝑡
]︂
𝑒𝐴(𝑡−𝜏 ) 𝐵𝑈 (𝜏 ) 𝑑𝜏 ,
(4.1),
(4.89)
𝑡−ℎ
где вектор-строка 𝐾 такая, что матрица (𝐴 + 𝐵𝐾) гурвицева,
𝑉 (𝑡) = −
𝑘
∑︁
1 ˆ
1
1
ˆ
𝑘𝑝𝑖 (𝑡)𝜉ˆ𝑖 (𝑡) +
𝑘𝑑𝑖 (𝑡)𝜉˙𝑖 (𝑡),
𝜉0 (𝑡) −
ˆ
ˆ
𝐿0
𝐿𝑢𝑖 (𝑡)
𝑖=1 𝐿𝑢𝑖 (𝑡)
(4.90)
4.4. Компенсация мультигармонического возмущения
113
𝑘𝑝𝑖 (𝑡) = cos (ℎˆ
𝜔𝑖 (𝑡) − 𝜙ˆ𝑢𝑖 (𝑡)) ,
(4.91)
𝑘𝑑𝑖 (𝑡) =
(4.92)
sin (ℎˆ
𝜔𝑖 (𝑡) − 𝜙ˆ𝑢𝑖 (𝑡))
,
𝜂𝑖 (𝑡)
⃒
⃒
⃒
⃒
𝑏(𝑗 𝜔
ˆ 𝑖 (𝑡))𝜆2𝑘
ˆ 𝑢𝑖 (𝑡) = ⃒
⃒,
𝐿
⃒ 𝑎(𝑗 𝜔
2𝑘
ˆ 𝑖 (𝑡))(𝑗 𝜔
ˆ 𝑖 (𝑡) + 𝜆) ⃒
𝜙ˆ𝑢𝑖 (𝑡) = arg
𝑏(𝑗 𝜔
ˆ 𝑖 (𝑡))𝜆2𝑘
,
𝑎(𝑗 𝜔
ˆ 𝑖 (𝑡))(𝑗 𝜔
ˆ 𝑖 (𝑡) + 𝜆)2𝑘
(4.93)
(4.94)
оценка частоты 𝜔
ˆ 𝑖 (𝑡) определяется адаптивным алгоритмом
идентификации (4.68)–(4.70), (4.72), входной сигнал для фильтра
˜2 (𝑡) определен в теореме 4.1, функции 𝜉ˆ0 (𝑡), 𝜉ˆ𝑖 (𝑡), 𝜉ˆ˙𝑖 (𝑡) опре(4.70) 𝑌
делены в (4.83)–(4.85), а переменные 𝜂𝑖 (𝑡) вводятся также, как и
в главе 2:
{︃
𝜂𝑖 (𝑡)
=
𝜔
ˆ 𝑖 (𝑡)
𝜔0
для 𝜔
ˆ 𝑖 (𝑡) > 𝜔0 ,
иначе,
(4.95)
где 𝜔0 — известная нижняя граница частот 𝜔𝑖 . C учетом допущений 4.1–4.3, выходная переменная замкнутой системы ограничена
и стремится к нулю
lim 𝑌 (𝑡) = 0.
(4.96)
𝑡→∞
Д о к а з а т е л ь с т в о у т в е р ж д е н и я 4.1. Как и в теореме 3.1
рассмотрим ошибку в управлении
𝑉˜ (𝑡)
Ошибка
= 𝑉 (𝑡) − 𝑉¯ (𝑡).
(4.97)
𝑉˜ (𝑡) является ограниченной функцией и при этом стре-
мится к нулю:
lim 𝑉˜ (𝑡)
𝑡→∞
=
0.
(4.98)
Компонента управляющего воздействия, обеспечивающая компенсацию возмущения, имеет вид
𝑉 (𝑡) = −
(︂
)︂
𝑘
∑︁
1
𝜙𝑖 + 𝜙𝜉𝑖
1
𝜉0 (𝑡 + ℎ)−
𝜉𝑖 𝑡+ℎ−
+ 𝑉˜ (𝑡).
𝐿0
𝐿𝐿
𝜔𝑖
𝑖=1 𝑖 𝜉𝑖
(4.99)
114
Глава 4. Неустойчивые объекты с запаздыванием
Результат (4.96) следует из леммы 4.1 и леммы 3.1 (см. (4.80)).
В самом деле, подставляя (4.99) в (4.74) и учитывая результат
леммы 3.1, имеем
[︂
𝑌 (𝑡)
=
𝑏(𝑝)
𝑎(𝑝)
+𝜎 +
]︂ (︃
)︂)︃
(︂
𝑘
∑︁
1
1
𝜙
+
𝜙
𝑖
𝜉𝑖
𝑉˜ (𝑡) −
𝜎−
𝜉𝑖 𝑡 −
𝐿0
𝐿𝐿
𝜔𝑖
𝑖=1 𝑖 𝜉𝑖
𝑘
∑︁
𝛿𝑖 (𝑡) + 𝜀(𝑡)
𝑖=1
=
где
𝛼(𝑡) + 𝜀2 (𝑡),
[︁
]︁
𝑏(𝑝) ˜
функция 𝛼(𝑡) =
𝑎(𝑝) 𝑉 (𝑡)
𝜀2 (𝑡)
(4.100)
ограничена и стремится к нулю,
— экспоненциально затухающая функция, откуда следует вы-
полнение цели (4.96).
𝑈 (𝑡 + 𝑥 − ℎ) вместо 𝑢(𝑧, 𝑡) в (4.17) и делая замену
𝜏 = 𝑡 + 𝑥 − ℎ, получим (4.89). Таким образом, утвер-
Подставляя
переменных
ждение 4.1 доказано.
З а м е ч а н и е 4.3 Следует отметить, что в случае неточного
задания параметров объекта рассматриваемый алгоритм управления может оказаться неудовлетворительным. Разработка робастных алгоритмов, обеспечивающих достижение сформулированной цели управления в случае неточно заданных параметров,
является предметом дальнейших исследований.
4.5 Числовой пример
4.5
115
Числовой пример
Рассмотрим объект управления вида
𝐴=
[︂
0
1
]︂
[︂ ]︂
[︂ ]︂
1
0
1
, 𝐵=
, 𝐶𝑇 =
0
2
0
с (неизвестным) возмущением
∆(𝑡) =
[︂ ]︂ [︂ ]︂
[︂ ]︂
1
1
−1
+
sin(𝜔𝑡) +
cos(𝜔𝑡).
2
−3
1
Разомкнутый контур системы имеет один неустойчивый корень
Начальные условия
1.
𝑋0 = [1, 2]𝑇 .
Выберем следующие параметры закона управления:
𝐾 = [−3 − 3],
𝐿 = [2 2].
Результаты моделирования представлены на рис. 4.1–4.3 для
различных частот
ния
𝜔
и значений запаздывания в канале управле-
𝐷.
Рис. 4.1 подтверждают, что алгоритм работает также и при отсутствии запаздывания. В этом случае мы подставляем значение
ноль парамера
ℎ
в законе управления.
На рис. 4.1а, 4.2а и 4.3а показано, что оценки частот стремятся
к истинным значениям.
Оценки
𝜉ˆ0 , 𝜉ˆ1
и
ˆ
𝜉˙1
представлены на рис. 4.1б, 4.2б, 4.3б.
Сигнал управляющего воздействия представлен на рис. 4.1в,
4.2в, 4.3в. Заметим, что амплитуда управляющего воздействия при
компенсации возмущения меньше, чем в случае стабилизирующего
управления без компенсации.
Рис. 4.1г, 4.2г, 4.3г демонстрируют, что алгоритм управления,
основанный на предикторе Крстича стабилизирует систему, но не
компенсирует возмущение, в то время как полный регулятор обеспечивает асимптотическую сходимость выходной переменной к нулю.
116
Глава 4. Неустойчивые объекты с запаздыванием
5
ω̂
4
3
1,5
2
1
1
0
−1
t, c
0
0
ξˆ0
−2
0,5
5
10
15
20
(а) Временная диаграмма оценки частоты 𝜔
^ (𝑡)
5
−3
ξˆ1
−4
ˆ
ξ˙1
−5
0
(б)
5
Временная
10
t, c
15
диаграмма
20
оценки
функций 𝜉^1 (𝑡), 𝜉^2 (𝑡) и 𝜉^3 (𝑡)
5
a
b
c
4
0
3
−5
2
−10
1
−15
0
a
b
−20
0
5
10
15
t, c
t, c
20
(в) Временная диаграмма запаздывающего управления 𝑈 (𝑡 − ℎ) без компенсации (a) и с компенсацией возмущения (b)
−1
0
5
10
15
20
(г) Временная диаграмма выходной
переменной 𝑌 (𝑡) без управления (a),
с управлением без компенсации (b) и
с компенсацией возмущения (c)
Рис. 4.1. Временные диаграммы оценки компонентов возмущения,
входной и выходной переменных без управления (𝑈 (𝑡)
= 0), толь(𝑡) = 0) и с компенсацией
ℎ = 0 и параметрами иденти-
ко со стабилизирующим управлением (𝑉
𝜔 = 1, 5, запаздывание
𝜆 = 2, 𝑘 = 2
возмущения
фикатора
4.5 Числовой пример
117
15
ω̂
1,2
10
ξˆ0
5
ˆ
ξ˙1
ξˆ1
1
0,8
0,6
0
0,4
−5
0,2
t, c
0
0
5
10
15
20
25
30
(а) Временная диаграмма оценки частоты 𝜔
^ (𝑡)
30
t, c
−10
0
(б)
5
10
Временная
15
20
25
диаграмма
30
оценки
функций 𝜉^1 (𝑡), 𝜉^2 (𝑡) и 𝜉^3 (𝑡)
40
a
b
20
a
b
c
30
10
20
0
−10
10
−20
0
−30
t, c
t, c
−40
0
5
10
15
20
25
30
(в) Временная диаграмма запаздывающего управления 𝑈 (𝑡 − ℎ) без компенсации (a) и с компенсацией возмущения (b)
−10
0
5
10
15
20
25
30
(г) Временная диаграмма выходной
переменной 𝑌 (𝑡) без управления (a),
с управлением без компенсации (b) и
с компенсацией возмущения (c)
Рис. 4.2. Временные диаграммы оценки компонентов возмущения,
входной и выходной переменных без управления (𝑈 (𝑡)
= 0), толь(𝑡) = 0) и с компенсацией
ℎ = 0, 5 и параметрами иденти-
ко со стабилизирующим управлением (𝑉
𝜔 = 1, запаздывание
𝜆 = 1, 𝑘 = 2
возмущения
фикатора
118
Глава 4. Неустойчивые объекты с запаздыванием
60
ω̂
ξˆ0
50
1,25
ξˆ1
40
1
ˆ
ξ˙1
30
20
0,75
10
0,5
0
0,25
−10
t, c
t, c
0
0
5
10
15
20
25
30
(а) Временная диаграмма оценки частоты 𝜔
^ (𝑡)
100
−20
0
(б)
5
10
Временная
15
20
25
диаграмма
30
оценки
функций 𝜉^1 (𝑡), 𝜉^2 (𝑡) и 𝜉^3 (𝑡)
100
a
b
a
b
c
80
50
60
40
0
20
0
−50
−20
t, c
t, c
−100
0
5
10
15
20
25
30
(в) Временная диаграмма запаздывающего управления 𝑈 (𝑡 − ℎ) без компенсации (a) и с компенсацией возмущения (b)
−40
0
5
10
15
20
25
30
(г) Временная диаграмма выходной
переменной 𝑌 (𝑡) без управления (a),
с управлением без компенсации (b) и
с компенсацией возмущения (c)
Рис. 4.3. Временные диаграммы оценки компонентов возмущения,
входной и выходной переменных без управления (𝑈 (𝑡)
= 0), толь(𝑡) = 0) и с компенсацией
ℎ = 1 и параметрами иденти-
ко со стабилизирующим управлением (𝑉
𝜔 = 0, 5, запаздывание
𝜆 = 0, 5, 𝑘 = 1
возмущения
фикатора
4.6 Заключительные выводы по главе
4.6
119
Заключительные выводы по главе
1. Рассмотрен алгоритм стабилизации неустойчивых линейных
объектов с запаздыванием в канале управления и внешним
возмущающим воздействием.
2. Приведено доказательство о том, что реакция замкнутой
стабилизированной системы на мультигармоническое воздействие является также муьтигармоническим.
3. Рассмотрен алгоритм построения адаптивного наблюдателя
мультигармонического возмущающего воздействия, включая
оценивание всех частот, для линейного неустойчивого объекта
управления.
4. Рассмотрен алгоритм адаптивной компенсации мультигармонического возмущающего воздействия для линейного неустойчивого объекта с запаздыванием в канале управления.
5. Приведены результаты математического моделирования описанных алгоритмов управления.
Заключение
В пособии рассмотрены задачи, связанные с управлением в условиях запаздывания и действия возмущающих воздействий. Во введении приведены примеры задач управления в условиях запаздывания и действия возмущающих воздействий. В первой главе рассмотрен анализ существующих методов управления, сформулирована обобщенная постановка задачи, обозначены три цели, каждая
из которых рассматривается в рамках отдельной главы.
Во второй главе рассмотрено решение задачи построения адаптивного наблюдателя мультигармонического сигнала, позволяющего получать оценки всех параметров, включая общее смещение, все
частоты, амплитуды и начальные фазы. Приведено доказательство
теоремы о том, что алгоритм идентификации обеспечивает экспоненциальную сходимость к нулю ошибки оценивания частоты смещенного синусоидального сигнала. Отмечены адаптивные свойства
по отношению к изменению параметров сигнала. Изменяя параметры алгоритма можно управлять временем переходного процесса идентификации. Показано, что алгоритм обладает робастными
свойствами по отношению к нерегулярной составляющей, присутствующей в сигнале.
В третьей главе рассмотрено решение задачи компенсации мультигармонического возмущения для линейного и нелинейного объектов управления с запаздыванием по входу. С использованием результата второй главы получен адаптивный наблюдатель возмущающего воздействия, который оценивает все частоты возмущения,
выделяет из многокомпонентного сигнала каждую гармонику и ее
производную. На основе адаптивного наблюдателя строится предиктор, обеспечивающий формирование управляющего сигнала с
Заключение
121
упреждением на необходимое время запаздывания. Такой алгоритм
позволяет обеспечить ограниченность всех траекторий системы и
сходимость к нулю выходной переменной. На ряду с результатами
математического моделирования приведены результаты практического использования рассмотренного подхода на мехатронном исследовательском маятниковом комплексе “The Mechatronics Control
Kit”, предоставленного фирмой “Mechatronic Systems, Incorporated”.
Для исследования работы алгоритма в условиях запаздывания
необходим программный буфер, через который пропускается функция управления: сигнал управления подается на вход буфера, а выходной сигнал буфера поступает на объект управления. Для исследования алгоритма управления в условиях действия возмущения
используется тележка на подвижной основе, на которой смонтирован маятник.
В четвертой главе рассмотрен способ обобщения результата третей главы на случай неустойчивых систем с запаздыванием в канале управления. Алгоритм стабилизации неустойчивой системы с
запаздыванием основан на решении уравнения в частных производных первого порядка (“transport PDE”) [70], [68] с использованием
классической процедуры бэкстеппинг [69]. Закон управления по выходу формируется из двух составляющих: первая расчитывается из
соображений стабилизации неустойчивой системы, и вторая — для
компенсации возмущения. Блок запаздывания предстапвляется в
виде уравнения в частных производных, что позволяет применить
процедуру бэкстеппинг [70]. Рассмотрен регулятор, стабилизирующий систему с возмущением. Отсутствие запаздывания является
частным случаем решенной задачи. С использованием результатов
второй и третей глав строится адаптивный наблюдатель возмущающего воздействия, обеспечивающий оценку всех частот. Основной
результат, описанный в четвертой главе, — это алгоритм синтеза
комбинированного регулятора, способного стабилизировать объект
с запаздыванием по управлению и компенсировать при этом возмущающее воздействие.
Литература
[1] Андриевский Б.Р. Стабилизация перевернутого маятника с
инерционным маховиком в качестве движителя. Управление
в физико-технических системах / Под ред. А.Л. Фрадкова. —
СПб.: Наука, 2004. C. 52–71.
[2] Арановский С.В., Бобцов А.А., Кремлев А.С., Лукьянова Г.В.
Робастный алгоритм идентификации частоты синусоидального сигнала // Известия РАН. Теория и системы управления.
— 2007. № 3. — С. 1–6.
[3] Арановский С.В., Бобцов А.А., Пыркин А.А. Адаптивный наблюдатель неизвестного синусоидального выходного возмущения для линейного объекта // Автоматика и телемеханика.
— 2009. № 11. — С. 108–116.
[4] Арановский С.В., Бардов В.М., Бобцов А.А., Капитонов А.А.,
Пыркин А.А. Синтез наблюдателя в условиях возмущения
процесса измерения выхода объекта. // Изв. вузов. Приборостроение. — 2009. № 11. — С. 28–32.
[5] Бесекрерский
В.А.,
Попов
Е.П.
Теория
автоматического
управления. СПб.: Профессия, 2003.
[6] Бобцов А.А. Алгоритм управления по выходу с компенсацией
гармонического возмущения со смещением // Автоматика и
телемеханика. — 2008 № 8. — С. 25–32.
[7] Бобцов А.А. Алгоритм управления по выходу с компенсацией
смещенного гармонического возмущения // Известия РАН.
Теория и системы управления. 2009. № 1. — C. 45–48.
Литература
123
[8] Бобцов А.А., Пыркин А.А. Компенсация гармонического возмущения в условиях запаздывания по управлению // Известия РАН. Теория и системы управления. — 2008. № 4. — С.
19–23.
[9] Бобцов А.А., Пыркин А.А. Компенсация неизвестного синусоидального возмущения для линейного объекта любой относительной степени // Автоматика и Телемеханика. — 2009. №
3. — С. 114–122.
[10] Бобцов А.А., Колюбин С.А., Пыркин А.А. Компенсация неизвестного мультигармонического возмущения для нелинейного
объекта с запаздыванием по управлению // Автоматика и телемеханика. — 2010. № 11. — С. 136–148.
[11] Бобцов А.А., Колюбин С.А., Никифоров В.О., Пыркин А.А.
Адаптивное и гибридное управление с компенсацией возмущений
и
запаздывания
//
XXXIX
научная
и
учебно-
методическая конференция СПбГУ ИТМО. — 2010.
[12] Гурецкий Х. Анализ и синтез систем управления с запаздыванием. — М.: Машиностроение, 1973. — 328 с.
[13] Еремин Е.Л., Теличенко Д.А. Алгоритмы адаптивной системы с запаздыванием по управлению в схеме с расширенной
ошибкой и эталонным упредителем // Мехатроника, автоматизация, управление. — 2006. № 6. — С. 9–16.
[14] Кирьянен А.И. Устойчивость систем с последействием и их
приложения. — СПб.: Издательство С.-Петербургского университета, 1994. — 235 с.
[15] Колюбин С.А., Пыркин А.А., Рогожина К.П., Слинченкова
М.В. Компенсация гармонического возмущения // Научнотехнический вестник СПбГУ ИТМО. — 2008. Вып. 55. — С.
51–60.
[16] Колюбин С.А., Пыркин А.А. Адаптивное управление маятником с реакционным маховиком // Мехатроника, автоматизация, управление. — 2010. № 5. — С. 28–32.
124
Литература
[17] Лихтарников А.А., Якубович В.А. Абсолютная устойчивость
нелинейных систем // Приложения к книге Резван В. Абсолютная устойчивость автоматических систем с запаздыванием. — М.: Наука, 1983.
[18] Миркин Е.Л. Метод адаптивного управления с эталонной моделью объектами с последействием // Автоматизация технологических процессов. Фрунзе.: Изд. ФПИ. — 1987. — С. 64–
69.
[19] Мирошник И.В., Никифоров В.О., Фрадков А.Л. Нелинейное
и адаптивное управление сложными динамическими системами. — СПб.: Наука, 2000. — 549 с.
[20] Никифоров В.О. Адаптивное и робастное управление с компенсацией возмущений. — СПб.: Наука, 2003. — 282 с.
[21] Острём К., Виттенмарк Б. Системы управления с ЭВМ. — М.:
Мир, 1987.
[22] Первозванский А.А. Курс теории автоматического управления: Учеб. пособ. — М.: Наука. Гл. ред. физ.-мат. лит., 1986.
— 616 с.
[23] Проскурников А.В., Якубович В.А. Универсальные регуляторы для оптимального отслеживания полигармонических сигналов в системах с запаздыванием // Докл. РАН. — 2006. Т.
406. № 2. — С. 109–174.
[24] Проскурников А.В., Якубович В.А. Задача об абсолютной инвариантности для систем управления с запаздыванием // Докл. РАН. — 2004. Т. 397. № 5. — С. 610–614.
[25] Пыркин А.А. Адаптивный алгоритм компенсации параметрически неопределенного смещенного гармонического возмущения для линейного объекта с запаздыванием в канале управления // Автоматика и Телемеханика. — 2010. № 8. — С. 62–78.
[26] Пыркин
А.А.
Управление
в
условиях
запаздывания
//
Научно-технический вестник СПбГУ ИТМО. — 2007. Вып. 38.
— C. 287–292.
Литература
125
[27] Пыркин А.А., Адаптивный алгоритм компенсации параметрически неопределенного возмущающего воздействия с приложением для мехатронного маятникового комплекса // Первая Традиционная Школа “Управление, информация и оптимизация”, Переславль-Залесский / Сборник трудов. — М.:
ИПУ РАН, 2009. — 160 с. ISBN 978-5-91450-049-5, С. 67–74.
[28] Синтез дискретных регуляторов при помощи ЭВМ / В.В. Григорьев, В.Н. Дроздов, В.В. Лаврентьев, А.В. Ушаков. — Л.:
Машиностроение, 1972.
[29] Резван В. Абсолютная устойчивость автоматических систем
с запаздыванием. — М.: Наука, 1997. — 216 с.
[30] Фуртат И.Б., Цыкунов А.М. Адаптивное управление объектами с запаздыванием по выходу // Изв. вузов. Приборостроение. — 2005. № 7. — С. 15–19.
[31] Цыкунов А.М. Адаптивное управление объектами с последействием. — М.: Наука, 1984. — 245 с.
[32] Цыкунов А.М. Алгоритмы скоростного градиента для систем
с запаздыванием // Автоматика и телемеханика. — 1989. № 1.
— С. 122–130.
[33] Цыкунов А.М. Адаптивное и робастное управление динамическими объектами по выходу. — М.: ФИЗМАТЛИТ, 2009. —
268 с.
[34] Цыпкин Я.З. Устойчивость систем с запаздывающей обратной
связью // Автоматика и телемеханика. — 1947. Т. 7. № 2, 3.
— С. 107–129.
[35] Цыпкин Я.З. Оптимальные адаптивные системы управления
объектами с запаздыванием // Автоматика и Телемеханика.
— 1986. № 8. — С. 5–24.
[36] Янушевский Р.Т. Управление объектами с запаздыванием. —
М.: Наука, 1987.
126
Литература
[37] Andrievsky
B.,
Fradkov
A.,
Andrievsky
A.,
Pyrkin
A.
Experimental study of nonlinear systems synchronization over the
limited-band communication channel // The 2008 IEEE Multiconference on Systems and Control. — San Antonio, Texas, USA.
[38] Aranovskiy S., Bobtsov A., Kremlev A., Nikolaev N., Slita O.
Identification of frequency of biased harmonic signal // IFAC
Workshop on Adaptation and Learning in Control and Signal
Processing (ALCOSP 07). — Saint Petersburg, Russia, 2007.
[39] Aranovskiy S., Bobtsov A., Nikolaev N., Pyrkin A., Slita O. An
adaptive observer for chaotic Duffing system // 6th EUROMECH
Conference ENOC. — Saint Petersburg, Russia, 2008.
[40] Arstein Z. Linear systems with delayed controls: A reduction //
IEEE Trans. Autom. Control. — 1982. vol. 27. — P. 869–879.
[41] Bobtsov A.A., Romasheva D.A. Frequency estimator of a biased
sinusoid // Proc. 46th IEEE Conference on Decision and Control.
— New Orlean, 2007. — P. 5534–5538.
[42] Bobtsov A.A., Kremlev A.S. Adaptive compensation of biased
sinusoidal disturbances with unknown frequency // Proc. 16th
IFAC World Congress. — Prague, 2005.
[43] Bobtsov A., Pyrkin A. A new approach to MRAC problem with
disturbance rejection // 9th IFAC Workshop ALCOSP. — SaintPetersburg, Russia, 2007.
[44] Bobtsov A., Pyrkin A. Experimental research of consecutive
compensator approach on basis of mechatronic systems // 6th
EUROMECH Conference ENOC. — Saint-Petersburg, Russia,
2008.
[45] Bobtsov A., Nikolaev N., Pyrkin A., Slita O. Adaptive observer
design for chaotic Duffing system // 17th IFAC World Congress.
— Seoul, Republic Korea, 2008.
[46] Bobtsov A., Nikolaev N., Pyrkin A., Slita O. Stabilization of a
chaotic Van der Pole system // 17th IFAC World Congress. —
Seoul, Republic Korea, 2008.
Литература
127
[47] Bobtsov A.A., Pyrkin A.A., Nikolaev N.A., Slita O.V. Adaptive
observer design for chaotic Duffing system // Int. Journal of
Robust and Nonlinear Control. — 2009. vol. 19. — P. 829–841.
[48] Bobtsov A.A., Kolyubin S.A., Pyrkin A.A. Adaptive stabilization
of reaction wheel pendulum on moving LEGO platform // 3rd
IEEE Multi-conference on Systems and Control (MSC 2009). —
Saint Petersburg, Russia, 2009.
[49] Bobtsov
observers
A.A.,
for
Efimov
locally
D.V.,
Pyrkin
Lipschitz
A.A.
systems
Hybrid
with
adaptive
application
to
mechanical oscillators // 3rd IEEE Multi-conference on Systems
and Control (MSC 2009). — Saint Petersburg, Russia, 2009.
[50] Bobtsov
A.A.,
Kolyubin
reaction
wheel
pendulum
Identification
of
S.A.,
on
Unknown
Pyrkin
movable
Parameters
A.A.
Stabilization
of
support
with
//
International
4th
on-line
conference ‘Physics and Control’ (Physcon 2009). — Catania,
Italy, 2009.
[51] Bobtsov A.A., Pyrkin A.A. Adaptive output stabilization of timedelay nonlinear system // 9th IFAC Workshop on Time Delay
System. — Prague, Czech Republic, 2010.
[52] Bodson M., Douglas S. C. Adaptive algorithms for the rejection of
periodic disturbances with unknown frequencies // Automatica.
— 1997. vol. 33. — P. 2213–2221.
[53] Bresch-Pietri D., Krstic M. Adaptive trajectory tracking despite
unknown input delay and plant parameters // Automatica. —
vol. 45. P. 2074–2081.
[54] Evesque
S.,
Annaswamy
A.M.,
Niculescu
S.,
Dowling
A.P.
Adaptive control of a class of time-delay systems // ASME
Transactions on Dynamics, Systems, Measurement, and Control.
— 2003. vol. 125. — P. 186–193.
[55] Fiagbedzi Y.A., Pearson A.E. Feedback stabilization of linear
autonomous time lag systems // IEEE Trans. Autom. Control.
— 1986. vol. 31. — P. 847–855.
128
Литература
[56] Franceschi E.M., Muske K.R., Jones J.C.P. An adaptive delaycompensated PID air/fuel ratio controller // SAE. — N. 2007-011342.
[57] Furtat I., Tsykunov A. Output adaptive control for plants using
time delay in output signal based on the modified algorithm
of adaptation of high order // IFAC Workshop on Adaptation
and Learning in Control and Signal Processing (ALCOSP 07). —
Saint-Petersburg, Russia, 2007.
[58] Gu K., Niculescu S.I. Survey on recent results in the stability and
control of time-delay systems // Trans. ASME. — 2003. vol. 125.
— P. 158–165.
[59] Hou M. Amplitude and frequency estimator of a sinusoid // IEEE
Transactions on Automatic Control. — 2005. vol. 50. — P. 855–
858.
[60] Hsu L., Ortega R., Damm G. A globally convergent frequency
estimator // IEEE Transactions on Automatic Control. 1999. —
vol. 44. — P. 698–713.
[61] Jankovic M. Control Lyapunov-Razumikhin functions and robust
stabilization of time delay systems // IEEE Trans. on Automatic
Control. — 2001. vol. 46. — P. 1048–1060.
[62] Jankovic M. Control of nonlinear systems with time delay //
IEEE Conference on Decision and Control. — 2003.
[63] Jankovic
M.
assignment
Forwarding,
for
time
backstepping,
delay
systems
and
//
finite
American
spectrum
Control
Conference. — 2006.
[64] Jankovic M. Control of cascade systems with time delay — the
integral cross-term approach // IEEE Conf. on Decision and
Control. — 2006.
[65] Khalil H. Nonlinear systems, third edition, Upper Saddle River.
— New Jersey: Prentice Hall, 2002.
Литература
129
[66] Kolyubin S., Pyrkin A. Adaptive control of a reaction wheel
pendulum // 12th International Student Olympiad on Automatic
Control BOAC. — Saint-Petersburg, Russia, 2008.
[67] Krstic M. On compensating long actuator delays in nonlinear
control // IEEE Trans. Autom. Control. — 2008. vol. 53. — P.
1684–1688.
[68] Krstic M. Delay compensation for nonlinear, adaptive and PDE
systems. — Birkhauser, 2009.
[69] Krstic M., Kanellakopoulos I., Kokotovic P.V. Nonlinear and
adaptive control design. — Wiley, 1995.
[70] Krstic M., Smyshlyaev A. Backstepping boundary bontrol for
first-order hyperbolic PDEs and application to systems with
actuator and sensor delays // Systems & Control Letters. — 2008.
vol. 57. — P. 750–758.
[71] Kwon
W.H.,
Pearson
A.E.
Feedback
stabilization
of
linear
systems with delayed control // IEEE Trans. Autom. Control.
— 1980. vol. 25. — P. 266-269.
[72] Lin Z., Fang H. On asimptotic stabilizability of linear systems
with delayed input // IEEE Transactions on Automatic Control.
— 2007. vol. 52. N. 6. — P. 998–1013.
[73] Manitius A.Z., Olbrot A.W. Finite spectrum assignment for
systems with delays // IEEE Trans. Autom. Control. — 1979.
vol. 24. — P. 541–553.
[74] Marino
R.,
Santosuosso
G.
L.,
Tomei
P.
Robust
adaptive
compensation of biased sinusoidal disturbances with unknown
frequency // Automatica. — 2003. vol. 39. — P. 1755–1761.
[75] Marino R., Santosuosso G. L., Tomei P. Regulation of linear
systems with unknown additive sinusoidal sensor disturbances //
Proc. 17th IFAC World Congress. — Seoul, Repulic Korea, 2008.
— P. 4102–4107.
130
Литература
[76] Marino R., Tomei P. Adaptive regulator for uncertain linear
minimum phase systems with unknown undermodeled exosystems
regulation of linear systems with unknown additive sinusoidal
sensor disturbances // Proc. 17th IFAC World Congress. — Seoul,
Repulic Korea, 2008. — P. 11293–11298.
[77] Marino R., Tomei P. Adaptive regulation of uncertain linear
minimum phase systems with unknown exosystems // Proc.
IEEE 45th Conf. on Decision and Control. — San Diego, USA,
2006. — P. 1099–1104.
[78] Mazenc
F.,
Mondie
S.,
Francisco
R.
Global
asymptotic
stabilization of feedforward systems with delay at the input //
IEEE Trans. Automatic Control. — 2004. vol. 49. — P. 844–850.
[79] Mazenc
F.,
Mondie
S.,
Niculescu
S.I.
Global
asymptotic
stabilization for chains of integrators with a delay in the input
// IEEE Trans. on Autom. Control. — 2003. vol. 48. N. 1. — P.
57–63.
[80] Mazenc F., Bliman P.A. Backstepping design for timedelay
nonlinear systems // IEEE Transactions on Automatic Control.
— 2004. vol. 51. — P. 149-–154.
[81] Mechatronics
control
kit,
Model
M-1,
User’s
manual
//
Mechatronics Systems, Incorporated. — 2001.
[82] Mirkin L. On the approximation of distributed-delay control laws
// Systems & Control Letters. — 2004. vol. 51. — P. 331–342.
[83] Mondie S., Michiels W. Finite spectrum assignment of unstable
time-delay systems with a safe implementation // IEEE Trans.
on Automatic Control. — 2003. vol. 48. — P. 2207–2212.
[84] Niculescu S.I., Annaswamy A.M. An adaptive Smith-controller
for time-delay systems with relative degree
𝑛≥2
// Systems &
Control Letters. — 2004. vol. 49. — P. 347–358.
[85] Nikiforov
V.O.
disturbances
//
Adaptive
Proc.
13th
servocompensation
IFAC
Francisco, USA, 1996. — P. 175–180.
World
of
Congress.
input
—
San-
Литература
131
[86] Nikiforov
V.O.
Adaptive
non-linear
tracking
with
complete
compensation of unknown disturbances // European Journal of
Control. — 1998. vol. 4. N. 2. — P. 132–139.
[87] Nikiforov V.O. Adaptive servocompensation of external unknown
disturbances // Proc. 14th IFAC World Congress. — Beijing,
China, 1999. — P. 283–289.
[88] Olbrot
A.W.
Stabilizability,
detectability,
and
spectrum
assignment for linear autonomous systems with general time
delays // IEEE Trans. Autom. Control. — 1978. vol. 23. — P.
887–890.
[89] Pyrkin
A.,
Smyshlyaev
A.,
Bekiaris-Liberis
N.,
Krstic
M.
Rejection of sinusoidal disturbance of unknown frequency for
linear system with input delay // American Control Conference.
— Baltimore, USA, 2010.
[90] Pyrkin A., Smyshlyaev A., Bekiaris-Liberis N., Krstic M. Output
control
algorithm
for
unstable
plant
with
input
delay
and
cancellation of unknown biased harmonic disturbance // 9th
IFAC
Workshop
on
Time
Delay
System.
—
Prague,
Czech
Republic, 2010.
[91] Pyrkin A.A., Bobtsov A.A., Kremlev A.S. Rejection of unknown
biased harmonic disturbance for nonlinear system with input
delay // 9th IFAC Workshop on Time Delay System. — Prague,
Czech Republic, 2010.
[92] Pyrkin A.A., Bobtsov A.A., Kolyubin S.A. An adaptive observer
with reduced order for chaotic duffing system transmitting a
vector of parameters // 8th IFAC Symposium on Nonlinear
Control Systems. — Bologna, Italy, 2010.
[93] Pyrkin
A.A.,
Bobtsov
A.A.,
Chepinskiy
S.A.,
Kapitanyuk
Y.A. Compensation of unknown multiharmonic disturbance for
nonlinear plant with delay in control // 8th IFAC Symposium on
Nonlinear Control Systems. — Bologna, Italy, 2010.
[94] Richard J.P. Time-delay systems: an overview of some recent
advances and open problems // Automatica. — 2003. vol. 39.
— P. 1667–1694.
132
Литература
[95] Smith O.J.M. A controller to overcome dead time // ISA. — 1959.
vol. 6. — P. 28–33.
[96] Xia X. Global Frequency estimation using adaptive identifiers //
IEEE Transactions on Automatic Control. — 2002. vol. 47. — P.
1188–1193.
[97] Zhong Q.C., Mirkin L. Control of integral processes with dead
time. Part 2: Quantitative analysis // IEEE Proc. Control Theory
& Appl. — 2002. vol. 149. — P. 291–296.
[98] Zhong Q.C. On distributed delay in linear control laws. Part
I:
Discrete-delay
implementation
//
IEEE
Transactions
on
Automatic Control. — 2006. vol. 49. — P. 2074–2080.
[99] Zhong Q.C. Robust Control of Time-delay Systems. — Springer,
2006.
В 2009 году Университет стал победителем многоэтапного конкурса, в результате которого определены 12 ведущих университетов России, которым присвоена категория “Национальный исследовательский университет”.
Министерством образования и науки Российской Федерации была утверждена программа его развития на 20092018 годы. В 2011 году Университет получил наименование “СанктПетербургский национальный исследовательский университет информационных технологий, механики и оптики”.
КАФЕДРА СИСТЕМ УПРАВЛЕНИЯ И ИНФОРМАТИКИ
Кафедра Систем Управления и Информатики (до 2001 г. кафедра
Автоматики и Телемеханики) факультета Компьютерных Технологий и
Управления была основана в 1945 г. на базе факультета Электроприборостроения ЛИТМО. На кафедру Автоматики и телемеханики ЛИТМО была возложена задача подготовки специалистов по автоматизации
приборостроительной промышленности, автоматических систем управления, систем телемеханики и телеизмерений. Первый выпуск молодых
инженеров состоялся в 1948 г. и составил 17 человек. Первым заведующим кафедры был крупный специалист в области систем телеизмерений,
профессор Марк Львович Цуккерман.
В 1955 г. при кафедре образована научно-исследовательская лаборатории
(НИЛ).
В
этот
период
основные
направления
научно-
исследовательских работ представляли задачи автоматизации измерения
и регистрации параметров кораблей во время их мореходных испытаний,
а также стабилизации скорости и фазирования двигателей. Под научным
руководством проф. М.Л. Цуккермана была налажена подготовка научных кадров высшей квалификации через систему аспирантуры.
С 1959 г. по 1970 кафедру возглавлял ученик М.Л. Цуккермана доцент Ефимий Аполлонович Танский. За время его руководства в научноисследовательской работе на кафедре произошел заметный поворот к
проблемам автоматизации оптико-механического приборостроения, что
привело к длительному научно-техническому сотрудничеству кафедры с
ЛОМО им. В.И. Ленина, в рамках которого для нужд оборонной техники
была разработана целая гамма прецизионных фотоэлектрических следящих систем. В рамках научно-технического сотрудничества с НИИЭТУ
кафедра приняла участие в разработке автоматической фототелеграфной аппаратуры, реализованной в виде комплекса “Газета-2”.
С 1970 по 1990 г., за время руководства кафедрой известного в стране
специалиста в области автоматизированного электропривода и фотоэлектрических следящих систем доктора технических наук, профессора Юрия Алексеевича Сабинина, заметно изменилась структура дисциплин и курсов, читаемых студентам кафедры. К традиционным курсам
“Теория автоматического регулирования и следящие системы”, “Теория
автоматического управления, экстремальные и адаптивные системы”,
“Элементы автоматики” и “Телемеханика” были добавлены дисциплины:
“Теоретические основы кибернетики”, “Локальные системы управления”,
“САПР систем управления” и другие. Прикладные разработки кафедры были связаны с задачами адаптивной оптики для многоэлементных
зеркал оптических телескопов и коррекции волнового фронта технологических лазеров; с задачами адаптивной радиооптики применительно к
проблеме управления большими полноповоротными радиотелескопами;
гребного электропривода и робототехнических систем, автоматического
управления процессом мягкой посадки летательных аппаратов.
С 1990 г. научно-исследовательская работа кафедры велась по федеральным целевым программам и конкурсным проектам РФФИ, Минобразования и Администрации Санкт-Петербурга. С целью расширения
исследований, проводимых по теории нелинейных и адаптивным систем,
роботов и микропроцессорной техники, а также активизации подготовки
кадров в 1994 г. образована научная Лаборатория Кибернетики и Систем управления (руководитель проф. И.В. Мирошник). С 1994 г. существенно расширились международные контакты кафедры, участие в
самых престижных международных научных мероприятиях, организации конференций и симпозиумов. С 1998 г. на базе кафедры в университете ежегодно проводится Международная студенческая олимпиада по
автоматическому управлению, а с 2009 года проводится Всероссийский
Фестиваль Мехатроники и Робототехники.
В 2001 г. кафедра была переименована и получила название “Кафедра Систем управления и информатики”. В 2010 г. кафедру возглавил
доктор технических наук, профессор Бобцов Алексей Алексеевич, работающий в то время уже в должности декана факультета Компьютерных
технологий и управления. Профессор Бобцов А.А. является председателем советов молодых ученых Санкт-Петербурга и Северо-Западного Федерального Округа. В настоящее время кафедра является одним из ведущих российских научных и образовательных центров, ориентированным
на фундаментальные и прикладные исследования в области систем автоматического управления, робототехники и прикладной информатики,
подготовку высококвалифицированных специалистов XXI столетия.
Бобцов Алексей Алексеевич
Пыркин Антон Александрович
Адаптивное и робастное управление с
компенсацией неопределенностей
Учебное пособие
В авторской редакции
Компьютерная верстка
А.А. Бобцов, А.А. Пыркин
Дизайн обложки и иллюстраций
А.А. Бобцов, А.А. Пыркин
Редакционно-издательский отдел НИУ ИТМО
Зав. РИО
Лицензия ИД № 00408 от 05.11.99
Подписано к печати 05.04.2012
Заказ №
Тираж 100 экз.
Отпечатано на ризографе
Н.Ф. Гусарова
Редакционно-издательский отдел
Санкт-Петербургского национального
исследовательского университета
информационных технологий, механики и оптики
197101, Санкт-Петербург, Кронверкский пр., 49