передаточная функция возмущения - Учебно
реклама

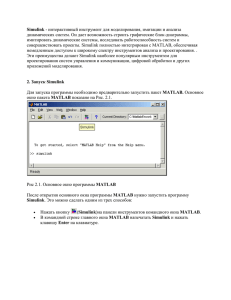
КАФЕДРА СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ № ЛОКАЛЬНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ Методическое пособие по лабораторной работе №3 ФАВТ Таганрог 2011 УДК 518.5.001.57(075.8) Евтушенко В.Ю., Василенко С.В., Денисенко М.Е. Локальные системы управления: Учебно-методическое пособие. – Таганрог: Изд-во ТТИ ЮФУ, 2011. – 26 с. Методическое пособие предназначено для студентов высших учебных заведений, изучающих дисциплину «Локальные системы управления». В методическом пособии приведено описание лабораторных работ, устройство стендов и примеры использования пакета MATLAB для расчета и моделирования локальных систем управления. Табл. 3. Ил. 15. Библиогр.: 7 назв. Рецензент Д.А. Беспалов канд. техн. наук, доцент кафедры вычислительной техники ТТИ ЮФУ. СОДЕРЖАНИЕ ВВЕДЕНИЕ …………………………………………. 4 Лабораторная работа № 3 СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ГАЗОХОДЕ ПЕЧИ………….... 5 1. Описание системы регулирования …………………. 5 2. Структурная схема и математическая модель системы регулирования…..…..…..…..….……………... 6 3. Моделирование системы регулирования давления в газоходе печи с помощью приложения Simulink пакета прикладных программ Matlab ……………… 8 4. Настройка блоков …………………………………… 14 5. Порядок выполнения работы………………………... 20 6. Содержание отчета …………………………………... 23 БИБЛИОГРАФИЧЕСКИЙ СПИСОК……………. 25 ВВЕДЕНИЕ В таких важнейших отраслях промышленности, как химия, энергетика, металлургия и др., трудно найти предприятие, в котором не использовались бы автоматические регуляторы на основе типовых законов управления. В настоящее время они представляют собой наиболее распространенный вид средств автоматизации. Для того чтобы правильно выбирать и эффективно использовать автоматические регуляторы, необходимо хорошо знать их возможности, технические характеристики, принципы построения и принципы выбора параметров настройки. Цель данного цикла лабораторных работ состоит в получении студентом знаний о принципах работы, свойствах и способах расчета локальных систем управления с использованием автоматических регуляторов на основе типовых законов управления. А также в изучении применения современных программных средств (на примере пакета MATLAB) для их расчета и анализа. Лабораторная работа № 3 СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ГАЗОХОДЕ ПЕЧИ Цель работы Анализ качества системы управления с типовым регулятором (на примере системы автоматического регулирования (СР) давления в газоходе печи) и изучение ее чувствительности к изменению параметров системы. 1. Описание системы регулирования Объект регулирования (ОР): газоходный тракт (далее газоход) конвертера. Регулируемая величина y: давление газа P в газоходе, измеряемое датчиком давления PT [Па]. Регулирующее воздействие u: перемещение заслонки (регулирующий орган РО) с помощью электрогидравлического серводвигателя EHS (исполнительное устройство ИУ). Устройство регулирования (с возможностью индикации и регистрации) давления PIC (рис.3.1, а). Функциональная схема системы автоматического регулирования давления показана на рис. 3.1, б. Информация о давлении подается на датчик давления 010 с последующим преобразованием изменения давления P в унифицированный токовый сигнал I, который поступает на вход корректирующего фильтра 015 и далее на вход регулятора 050 с типовым алгоритмом регулирования (ПИД-регулятор). Рис. 1. Функциональная схема объекта управления и системы в целом Регулятор формирует сигнал управления u и через серводвигатель 060, заслонку 070 воздействует на расход газа. Датчик с преобразователем 010, серводвигатель 060, фильтр 015 и регулятор 050 питаются от источника 012, а сам источник и регулятор питаются от трансформатора 011. Для индикации и регистрации давления используется автоматический потенциометр 031. 2. Структурная схема и математическая модель системы регулирования В соответствии с рис. 1, б, структурная схема СР имеет вид представленный на рис. 2. f(t) g(t) y(t) + F R EHS PO + OP PT - Рис. 2. Структурная схема Математическая модель системы представлена на рис. 3. Wf g(t) y(t) + W2 W3 W4 W5 W0 + f(t) W1 - Рис. 3. Математическая модель Передаточные функции элементов системы имеют следующий вид: k 0 e S Па ; k 0 10 ; − газоход (ОР) – W0 ( s) T0 s 1 угл.град T0 2 c; мА ; − датчик (РТ) – W1 (s) k1; k1 1 Па s 1 − корректирующий фильтр (F) – W2 ( s ) k 2 2 , T 2s 1 k 2 1 ; T2 0.1 c ; 2 0.2 c; регулятор (R) − ПИД-регулятор – k3 0,5 ; T3 100 c; 3 2.3 c ; серводвигатель (EHS) W3 ( s ) k3 (1 1 3 s ); T3 s k4 ; k 4 0,3 угл.град. ; T4 0,5 c; s (T4 s 1) с мА Па ; заслонка (РО) − W5 ( s) k 5 ; k 5 1 угл.град W4 ( s ) передаточная функция возмущения W f (s) kf Tf s 1 ; k f 0,5; T f 2,5 c. 3. Моделирование системы регулирования давления в газоходе печи с помощью приложения Simulink пакета прикладных программ Matlab При разработке и анализе систем автоматического управления часто возникает необходимость моделирования, так как оно позволяет наглядно оценить поведение системы в тех или иных условиях и выявить многие ее свойства (устойчивость, порядок астатизма, вид переходного процесса и т.д.). Одним из самых удобных инструментов численного моделирования на сегодняшний день является пакет прикладных программ MATLAB разработанный компанией Math Works. В рамках данной лабораторной работы, информация о системе регулирования задана в виде структурной схемы, поэтому для ее исследования воспользуемся приложением Simulink пакета MATLAB. Simulink является приложением к пакету MATLAB. При моделировании с использованием Simulink реализуется принцип визуального программирования, в соответствии с которым, пользователь на экране из библиотеки стандартных блоков создает модель устройства и осуществляет расчеты. При этом, в отличие от классических способов моделирования, пользователю не нужно досконально изучать язык программирования и численные методы математики, а достаточно общих знаний, требующихся при работе на компьютере и, естественно, знаний той предметной области, в которой он работает. При моделировании пользователь может выбирать метод решения дифференциальных уравнений, а также способ изменения модельного времени (с фиксированным или переменным шагом). В ходе моделирования имеется возможность следить за процессами, происходящими в системе. Для этого используются специальные устройства наблюдения, входящие в состав библиотеки Simulink. Результаты моделирования могут быть представлены в виде графиков или таблиц. Для запуска программы необходимо предварительно запустить пакет MATLAB. Нажатие на ярлык Simulink в панели инструментов приводит к открытию окна обозревателя разделов библиотеки Simulink. Чтобы создать свою программу необходимо создать новый файл модели, расположить блоки в окне модели. Для этого необходимо открыть соответствующий раздел библиотеки. Далее, указав курсором на требуемый блок и нажав на левую клавишу “мыши” – “перетащить” блок в созданное окно. Рис. 4. Расположение кнопки Simulink в окне MATLAB и вид окна обозревателя библиотеки блоков Далее, если это требуется, нужно изменить параметры блока, установленные программой “по умолчанию”. Для этого необходимо дважды щелкнуть левой клавишей “мыши”, указав курсором на изображение блока. Откроется окно редактирования параметров данного блока. При задании численных параметров следует иметь в виду, что в качестве десятичного разделителя должна использоваться точка, а не запятая. После внесения изменений нужно закрыть окно кнопкой OK. После установки на схеме всех блоков из требуемых библиотек нужно выполнить соединение элементов схемы. Для соединения блоков необходимо указать курсором на “выход” блока, а затем, нажать и, не отпуская левую клавишу “мыши”, провести линию к входу другого блока. После чего отпустить клавишу. В случае правильного соединения изображение стрелки на входе блока изменяет цвет. Для создания точки разветвления в соединительной линии нужно подвести курсор к предполагаемому узлу и, нажав правую клавишу “мыши”, протянуть линию. Для удаления линии требуется выбрать линию (так же, как это выполняется для блока), а затем нажать клавишу Delete на клавиатуре. Окно обозревателя библиотеки блоков содержит следующие элементы: 1. Заголовок, с названием окна – Simulink Library Browser. 2. Меню, с командами File, Edit, View, Help. 3. Панель инструментов, с ярлыками наиболее часто используемых команд. 4. Окно комментария для вывода поясняющего сообщения о выбранном блоке. 5. Список разделов библиотеки, реализованный в виде дерева. 6. Окно содержимого раздела библиотеки (список вложенных разделов библиотеки или блоков). 7. Строка состояния, содержащая подсказку по выполняемому действию. Библиотека Simulink содержит следующие основные разделы: 1. Continuous – библиотека непрерывных элементов (интегратор, дифференциатор, линейная система ОДУ и т.д.); 2. Discrete – библиотека дискретных элементов (дискретный фильтр, интегратор с дискретным временем и т.д.); 3. Math Operations – математические функции (абсолютное значение, комбинаторная логика, выделение вещественной и мнимой составляющей комплексного числа и т.д.); 4. Discontinuities – нелинейные элементы (релейное звено, переключатель и т.д. ); 5. Signal Routing – маршрутизация сигналов (мультиплексер, демультиплексер и т.д.); 6. Sinks – средства отображения (временная диаграмма, вывод результатов в файл, остановка выполнения модели и т.д.); 7. Sources – источники сигналов (генератор импульсных/синусоидальных сигналов, генератор случайных чисел, генератор пилообразных сигналов, часы и т.д.). 8. Ports & Subsystems – блоки портов и подсистем (входной сигнал, выходной сигнал, составной блок и т.д.). Информация о блоках, которые используются при выполнении лабораторной работы, содержится в табл. 1. Таблица 1 Используемые блоки Вид блока Название блока Раздел библиотеки Назначение Transfer Fcn Continuous Передаточная функция Transport Delay Continuous Запаздывание Gain Math Operations Усилитель Sum Math Operations Сумматор Add Math Operations Сложение сигналов Step Sources Ступенчатое воздействие Ramp Sources Линейное воздействие Ground Sources Clock Sources To Workspace Sinks Scope Sinks График переходного процесса Dead Zone Discontinuities Зона нечувствительности Saturation Discontinuities Насыщение Manual Switch Signal Routing Переключатель Заземление (нет входного воздействия) Часы (отсчеты времени используемые при моделировании) Запись данных в переменную рабочего пространства MATLAB 4. Настройка блоков 1. Transfer Fcn Рис. 5. Окно настройки блока Transfer Fcn В поле Numerator вводятся коэффициенты полинома числителя передаточной функции, а в поле Denominator – знаменателя. Значения вводятся через пробел, начиная с коэффициента при старшей степени s (s – оператор Лапласа). 2. Transport Delay Поле Time delay – время запаздывания. Рис. 6. Окно настройки блока Transport Delay 3. Gain Поле Gain – коэффициент усиления. Рис. 7. Окно настройки блока Gain 4. Sum Рис. 8. Окно настройки блока Sum Поле List of signs – расположение входов сумматора и их знаки. 5. Step Рис. 9. Окно настройки блока Step Поле Step time – момент подачи воздействия (лучше поставить 0), поля Initial Value, и Final Value – начальное и конечное значение сигнала соответственно. 6. Ramp Поле Slope – скорость изменения сигнала Рис. 10. Окно настройки блока Ramp 7. To Workspace Рис. 11. Окно настройки блока To Workspace Поле Variable name – имя переменной, Sample time – шаг по времени с которым измеряется переменная, Save format – формат переменной (лучше установить тип array). 8. Dead Zone Рис. 12. Окно настройки блока Dead Zone Поля Start of dead zone и End of dead zone – начало и конец зоны нечувствительности соответственно. 9. Saturation Поля Upper limit и Lower limit – верхнее и нижнее значения насыщения. Рис. 13. Окно настройки блока Saturation 10. Manual Switch Блок Manual Switch параметров настройки не имеет. Двойной щелчок по нему изменяет положение переключателя. 5. Порядок выполнения работы 1. Изучить структуру системы. 2. Собрать в Simulink структурную схему системы автоматического регулирования давления в газоходе печи (рис. 14). Снять переходные характеристики системы с ПИД-регулятором и без него, сравнить их. Возмущающее воздействие при этом положить равным нулю. 1 1 0.5 BXOD2 s+1 2 Kl 3 BOZM 2 1 1 P 1 0.2s+1 BXOD 0.5 0.1s+1 2 Kl 1 F I y 2 y Ground 1 100s K3 Kl 4 BXOD3 1 Kl 2 0.3 1 10 1 0.5s2 +s 1 2s+1 1 EHS PO OP PT Scope 2.3s BXOD1 0.001s+1 t Clock D time Рис. 14. Структурная схема системы автоматического регулирования 3. Построить графики реакции системы с ПИДрегулятором на ступенчатое и линейно нарастающее задающие воздействия. Сделать выводы о порядке астатизма системы по задающему воздействию. Возмущающее воздействие при этом положить равным нулю. 4. Построить графики реакции системы с ПИДрегулятором на ступенчатое и линейно нарастающее возмущающие воздействия. Сделать выводы о порядке астатизма по возмущающему воздействию. Задающее воздействие – единичный скачок. 5. Провести анализ чувствительности СУ с ПИДрегулятором к изменению параметров объекта управления. Построить графики. Заполнить таблицы 2, 3. Анализ проводим при изменении Т0, k0 на ±20 %, ±50 %. Исходные параметры объекта Т0 = 2 с, k0 = 10. Таблица 2 Значение параметра Время регулирования tр, c Перерегулирование σ, % 0,5Т0 0,8Т0 Т0 1,2Т0 1,5Т0 Таблица 3 Значение параметра Время регулирования tр, c Перерегулирование σ, % 0,5 k0 0,8 k0 k0 1,2 k0 1,5 k0 6. Собрать в Simulink структурную схему с нелинейным элементом (рис. 15). Нелинейным элементом является заслонка. Она имеет следующие параметры: − зона нечувствительности Δ = 0,01375; − насыщение xiнас = 0,1375. Построить переходную характеристику системы с нелинейным элементом. Сделать выводы о влиянии нелинейного элемента на качество системы управления. 0.5 BXOD2 1 s+1 BOZM 1 y P 0.2s+1 BXOD 0.5 0.1s+1 F 100s K3 I 2.3s BXOD1 BXOD3 1 Ground y 0.3 1 10 1 0.5s2+s 1 2s+1 1 EHS PO OP PT Dead Zone Saturation Scope Add 0.001s+1 t Clock D time Рис. 15. Структурная схема системы с нелинейным элементом 7. Добавить на выходе объекта регулирования (ОР) блок запаздывания. Построить переходные процессы при введении звена запаздывания с τ0 = 0,5τ0кр, τ0 = 0,8τ0кр, τ0 = τ0кр. В реальной системе объект регулирования имеет время запаздывания τ0кр = 0,62 с. Сделать выводы как влияет увеличение времени запаздывания на качество системы управления. 6. Содержание отчета 1. Цель работы. 2. Функциональная схема объекта управления и системы в целом. 3. Собранная в Simulink, структурная схема системы автоматического регулирования. 4. Переходная характеристика системы без регулятора и с ПИД-регулятором (в одних осях). 5. График реакции системы с ПИД-регулятором линейно нарастающее задающее воздействие. 6. Графики реакции системы с ПИД-регулятором на ступенчатое и линейно нарастающее возмущающие воздействия. 7. Таблицы изменения качества системы управления при изменении параметров объекта (таб. 2,3). Графики переходных характеристик СУ при изменении Т0 (в одних осях). Графики переходных характеристик СУ при изменении k0 (в одних осях). 8. Собранная в Simulink, структурная схема системы автоматического регулирования с нелинейным элементом. 9. Переходная характеристика СУ с нелинейным элементом. 10. Переходные характеристики СУ с нелинейным элементом при введении звена запаздывания (в одних осях). 11. Выводы по проделанной работе. Контрольные вопросы 1. Как влияет интегральная составляющая ПИДрегулятора на качество системы управления? 2. Как влияет пропорциональная составляющая ПИДрегулятора на качество системы управления? 3. Как влияет дифференциальная составляющая ПИДрегулятора на качество системы управления? 4. Как изменяется порядок астатизма системы по задающему воздействию при использовании ПИДрегулятора? 5. Как изменяется порядок астатизма системы по возмущающему воздействию при использовании ПИДрегулятора? 6. Как влияет увеличение запаздывания на качество системы управления? 7. Как влияет наличие нелинейного элемента на качество системы управления? 8. Как выглядит статическая характеристика нелинейного элемента описывающего заслонку? 9. Как влияет изменение параметров объекта управления на качество системы управления? БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1. Кошарский Б.Д. и др. Автоматические приборы, регуляторы и управляющие машины. – М.: Машиностроение, 1968. – 226 с. 2. Балакирев B.C., Цирлин А.М. и др. Определение динамических характеристик промышленных объектов управления. – М.: Энергия, 1967. – 167 с. 3. Ротач В.Я. Расчет динамики промышленных автоматических систем регулирования. – М.: Энергия, 1973. – 254 с. 4. Черныш П.И. Методические указания по выполнению курсового проекта "Расчет параметров настройки и схемотехнический синтез регулирующих устройств автоматики". – Таганрог: ТРТИ, 1983. – 30 с. 5. Топчеев Ю.И., Цыпляков А.П. Задачник по теории автоматического регулирования. – М.: Машиностроение, 1977. – 991 с. 6. Робототехника и гибкие автоматизированные производства. В 9-и кн. Кн. 2. Приводы робототехнических систем. Ахромеев Ж.Л. и др./ Под ред. Макарова И.М. – М.: Высш. шк., 1986. – 175 с. 7. Теория автоматического управления/ Под ред. Нетушило А.В. – М.: Высш. шк., 1976 (ч.1), 1983 (ч.2). Евтушенко Валентин Юрьевич Василенко Сергей Валерьевич Денисенко Максим Евгеньевич ЛОКАЛЬНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ Методическое пособие по лабораторной работе № 3 Ответственный за выпуск Финаев В.И. Редактор Селезнева Н.И. Корректор Селезнева Н.И. ЛР №020565 от 23 июня 97 г. Формат 60х84 1/16. Подписано к печати Печать офсетная. Бумага офсетная. Усл.п.л. – 1,6. Уч.-изд.л. – 1,3. Заказ № Тираж 150 экз. «С» Издательство Технологического института Южного федерального университета ГСП 17 А, Таганрог, 28, Некрасовский, 44 Типография Технологического института Южного федерального университета ГСП 17А, Таганрог, 28, Энгельса, 1