ISBN 978-5-7262-1377-4. НЕЙРОИНФОРМАТИКА – 2011. Часть 3
реклама

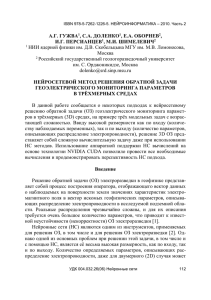
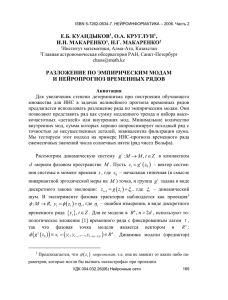
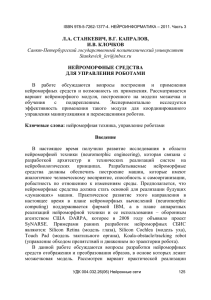
ISBN 978-5-7262-1377-4. НЕЙРОИНФОРМАТИКА – 2011. Часть 3 Р.Ф. ГАБИТОВ Филиал Уфимского государственного нефтяного технического университета, Стерлитамак Gabitoff@yandex.ru АВТОРЕГРЕССИОННАЯ НЕЙРОННАЯ СЕТЬ ДЛЯ МОДЕЛЬНО-ПРЕДИКАТИВНОГО УПРАВЛЕНИЯ МНОГОМЕРНОЙ ПЕЧЬЮ ПРОКАЛКИ КАТАЛИЗАТОРОВ КРЕКИНГА В работе представлены результаты моделирования, а также экспериментальных и теоретических исследований по модельно-предикативному управлению процессом прокалки цеолит-содержащих катализаторов, используемых для повышения эффективности процессов крекинга нефтепродуктов. Ключевые слова: модельно-предикативное управление, температурный профиль, авторегрессионная нейронная сеть Введение Эффективность процессов крекинга в производстве высокооктановых моторных топлив во многом определяется показателями качества применяемого катализатора, важнейшими из которых являются конверсионная активность и селективность [1]. Реализация этих свойств в условиях промышленной установки невозможна без обеспечения соответствующих эксплуатационных характеристик матрицы-носителя активных центров катализатора [2], которые в большей степени определяются качеством поддержания оптимального температурного режима в прокалочном аппарате производства катализаторов. Являясь самым энергозатратным элементом рассматриваемого производственного процесса, процесс прокаливания в значительной степени определяет как себестоимость, так и эксплуатационные свойства катализатора. На фоне повышения цен на энергоносители и ужесточения требований по времени жизни и износостойкости современного катализатора крекинга возникает острая необходимость в создании новой системы управления процессом прокалки, способной при минимальном расходе природного газа обеспечить соответствующие потребительские свойства продукта. Описание объекта управления и постановка задачи УДК 004.032.26(06) Нейронные сети 63 ISBN 978-5-7262-1377-4. НЕЙРОИНФОРМАТИКА – 2011. Часть 3 Прокалочный аппарат (рис. 1) представляет собой вращающуюся барабанную печь с прямым обогревом продукта дымовыми газами и попутным движением газов и сыпучего материала [1]. TE 4285 Топливный FCV4281 газ FT 4281 M-407 TIC 4284 FС FCV4282 4281 FFС 4281 PT 4282 FT 4282 TE 4284 M FCV4283 FС 4282 FС 4283 FT 4283 Пневмотранспорт TE 4286 Технический воздух Рис. 1. Функциональная схема автоматизации печи прокалки По мере роста температуры прокаливаемые частицы катализатора претерпевают цепь физико-химических превращений, продолжительность и условия течения каждого из которых напрямую определяют прочность на истирание, влагосодержание и насыпную плотность. Таким образом, для достижения заданных характеристик продукта необходимо построение и поддержание определенного температурного профиля печи. Ввиду относительно небольшой её протяженности (25 м.) основными показателями температурного профиля приняты температура топки и холодного конца печи. Существующая система управления температурным режимом печи построена на трех ПИД-регуляторах (рис. 1): соотношения «Топливный газвоздух» (FFC4281), расхода воздуха на горение (FC4281) с коррекцией по температуре холодного конца печи (TIC4284) и воздуха на разбавление (FC4283). Их настройка на реальных объектах относится к числу трудоемких задач [3]. Наиболее сложным в отладке является регулятор температуры холодного конца печи. Это вызвано нестабильностью постоянной времени объекта управления, так как она зависит от подачи топливной смеси, которая, в свою очередь, кроме источника энергии, исполняет роль теплоносителя. Это означает, что отработка любого задания регуляторов УДК 004.032.26(06) Нейронные сети 64 ISBN 978-5-7262-1377-4. НЕЙРОИНФОРМАТИКА – 2011. Часть 3 подачи воздуха и газа на горение изменяет одновременно как входной сигнал объекта управления, так и его статические и динамические характеристики. По этим причинам ПИД-регулятор температуры холодного конца не способен обеспечить точное и стабильное поддержание заданной температуры и в процессе реальной эксплуатации задание расхода воздуха на горение формируется оператором. Предлагаемая система управления Для повышения качества управления процессом прокалки предлагается применить модельно-предикативное управление (МПУ) с прогнозирующей моделью на основе динамической нейронной сети. Сущность МПУ заключается в периодической оптимизации предполагаемой стратегии управления на некоторый предсказуемый отрезок времени, называемый плавающим горизонтом управления [4]. Под стратегией управления понимается последовательность значений управляющего сигнала во времени, называемая вектором управления: (1) u (u1 , u2 ,, uNu ), где Nu tu / t su – горизонт управления, выраженный в количестве тактов; t su – шаг дискретизации по управлению, с; t u – горизонт управления, с. Вектору управления ставится в соответствие вектор прогнозируемых состояний: (2) y ( y1 , y2 ,, yNy ), где N y t y / t y – горизонт предикации, выраженный в количестве тактов; t y – шаг дискретизации по предикации, с; t y – горизонт предикации, с. Задача управления представляется в виде вектора заданных состояний yp, размерность которого одинакова с вектором состояний y. Общая структурная схема предлагаемой системы управления представлена на рис. 2. Задача оптимизации Su формируется блоком оценки минимизируемого показателя. В качестве приоритетной задачи выступает поиск такого управляющего вектора u, при котором отклонение вектора y от заданного вектора yp минимально. Такой вектор обеспечивает максимальное качество управления [4]. В целях обеспечения устойчивости системы, уменьшения перерегулирования и автоколебаний введены дополнительные криУДК 004.032.26(06) Нейронные сети 65 ISBN 978-5-7262-1377-4. НЕЙРОИНФОРМАТИКА – 2011. Часть 3 терии оптимизации, такие как девиация D(u ) – сумма приращений по всей длине вектора управления, определяемая формулой D(u ) Nu 1 (ui 1 ui )2 , (3) i 1 а также дополнительный учет рассогласования в определенных интервалах. Для компенсации инерционности системы в области больших отклонений, когда риск возникновения автоколебаний отсутствует и необходимо наискорейшее достижение заданного значения, весовой коэффициент минимизации девиации принимается равным нулю. Оценка показателя минимизации yp um Завершение оптимизации ym sy u Алгоритм оптимизации Нейросетевая модель yr K ur Объект управления печь прокалки ККФ Рис. 2. Структурная схема модельно-предикативного управления В целях уменьшения перерегулирования введено распознавание соответствующих зон при использовании анализа знака отклонения регулируемой величины. Для нормирования приоритета данной подзадачи был введен третий весовой коэффициент. В результате модифицированный на данном этапе критерий оптимизации приведен к следующему виду: Nu 1 k1 y pi yi i 1 2 k2 Nu 1 ui 1 ui i 1 2 k3 ( y pi yi )2 ymin i 1 y pi yi 2 =0, (4) где k1 – коэффициент приоритета оптимизации по ошибке регулирования; k 2 – коэффициент приоритета девиации вектора управления; k3 – коэффициент по рассогласованию в зонах перерегулирования, который меняется следующим образом: 2 В области больших отклонений: y pi yi ymin ; k3 0. (5) В области малых отклонений: y pi yi ymin ; k3 0. 2 (6) После оценки текущего вектора управления с точки зрения поставленных задач оптимизации осуществляется анализ на выполнение условий УДК 004.032.26(06) Нейронные сети 66 ISBN 978-5-7262-1377-4. НЕЙРОИНФОРМАТИКА – 2011. Часть 3 завершения оптимизации, таких как минимальный градиент оптимизируемой величины, минимальное изменение аргумента. Если оптимизация признана незавершенной, то выполняется модификация вектора управления u с применением алгоритма доверительных подпространств, основанном на методе внутренних отражений Ньютона [5, 6]. Модифицированный вектор управления u m поступает на модель объекта, которая повторяет с определенной степенью точности характер поведения объекта. Модель в составе алгоритма предикативного управления должна удовлетворять следующим требованиям: 1) достаточная адекватность; 2) возможность адаптации; 3) высокое быстродействие, которое можно оценить в данном случае отношением единицы времени реакции объекта ко времени фактического моделирования этой реакции. Наличие быстродействующей модели позволяет алгоритму МПУ за один такт работы производить испытание большого количества возможных модификаций вектора управления и по результатам моделирования сравнивать прогнозируемый отклик с заданным с целью поиска оптимального управляющего воздействия. Вышеперечисленным требованиям отвечают динамические модели на основе нейронных сетей. За основу модели взята известная в практике управления промышленными объектами последовательно-параллельная рекуррентная нелинейная нейронная сеть (НС) NARX [6]. Однако с учетом вышеперечисленных специфических свойств рассматриваемой печи нелинейные функции были перенесены на отдельную статическую НС. Таким образом, модель представляет собой комбинацию двух нейросетевых структур (рис. 3): НС1 и НС2. Входной сигнал, в качестве которого выступает очередной элемент управляющего вектора, претерпевает обработку статической НС прямого распространения (НС1). Задачей НС1 предварительной обработки является линеаризация статических показателей объекта управления. Затем происходит динамическое моделирование с использованием линий единичных задержек (Tapped Delay Line [7]) как на входе рекуррентной НС2 (TDLin), так и в петле обратной связи (TDLfb). Обучение и адаптация нейронных сетей производится подстройкой весовых коэффициентов wij и порогов bij методом обратного распространения ошибки по алгоритму оптимизации Левенберга-Маркардта (Levenberg-Marquardt) [7]. УДК 004.032.26(06) Нейронные сети 67 ISBN 978-5-7262-1377-4. НЕЙРОИНФОРМАТИКА – 2011. Часть 3 p 11 w 11 In(u) b 11 p 12 w14 b 13 b 14 w21 p2 w22 w12 w13 b 12 НС1 p 13 p 14 НС2 TDLfb afb1 afb2 p3 afbK w23 w24 b14 Out(y) TDLin ain1 ain2 ainN b14 Рис. 3. Нейросетевая динамическая модель После получения вектора прогнозируемых состояний ym последовательность повторяется. В случае выполнения условий завершения оптимизации первый элемент вектора управления ur поступает на вход объекта управления что соответствует нижнему положению переключателя K на рис. 8. По истечении времени одного шага дискретизации по управлению на входе обратной связи регулятора формируется значение состояния объекта управления yr (температура холодного конца), которое сопоставляется с первым элементом вектора прогнозируемых состояний, полученного на предыдущем шаге. По результатам сравнения можно судить об адекватности действующей нейросетевой модели [8] и при необходимости производить ее адаптацию. Для инициализации динамической модели на каждом шаге оптимизации используется состояние объекта управления yr. Начальное значение вектора управления, с которого начинается поиск минимума оптимизируемой функции, вычисляется от значения на предыдущей итерации поэлементным сдвигом на один элемент влево. Кроме значительного ускорения работы оптимизатора, такой способ инициализации уменьшает вероятность «застревания» алгоритма оптимизации в точке локального минимума, отличной от глобального. После построения концепции управления регулятором расхода воздуха на горение для стабилизации температуры холодного конца печи определены параметры алгоритма МПУ для данной задачи. Основными искомыми параметрами являются размеры горизонта управления Nu и предикации Ny в единицах времени, выбор которых определяется компромиссом между способностью стабильного и монотонного поддержания регулируемого параметра в заданных пределах и вычислительной емкостью алгоритма, которая возрастает пропорционально квадУДК 004.032.26(06) Нейронные сети 68 ISBN 978-5-7262-1377-4. НЕЙРОИНФОРМАТИКА – 2011. Часть 3 рату Nu и первой степени Ny. Шаг дискретизации по управлению tsu определен как максимальный период времени, в течение которого не происходит значительных отклонений поведения объекта от прогнозируемого [7]. В целях уменьшения числа свободных параметров и упрощения отладки основные параметры контроллера по управлению и предикации приняты одинаковыми: N y Nu ; tsy tsu . Исходя из вышеприведенных соображений, решено выбрать горизонт управления равным 800 с, шаг предикации 20 с. Горизонт управления в шагах предикации составляет: Nu 40. В качестве первичной задачи оптимизации выбрано отклонение вектора прогнозируемых значений температуры от вектора заданных значений: (7) y p y f (u) . Область допустимых значений управляющей переменной также является необходимым параметром при проектировании регулятора МПУ. В рассматриваемом случае c учетом эксплуатационной практики и норм технологического регламента приняты следующие пределы на выходное значение контроллера: umin 0,1; umax 1. Максимальное значение соответствует массовому расходу воздуха на горение, равному 1 кг/с. Оценка результатов тестирования системы управления Произведено сравнение двух вариантов предлагаемого регулятора и ПИД-регулятора, результаты которого в виде кривых переходного процесса представлены на рис. 4. Их анализ показывает, что алгоритм МПУ2 работает идентично с МПУ1 до достижения температурой отметки 680°С. После этого происходит увеличение весового коэффициента минимизации перерегулирования k3 (6), в результате чего стратегия управления препятствует выбегу кривой температуры ниже линии задания. Однако в связи с относительным уменьшением приоритета оптимизации по величине абсолютного рассогласования, увеличивается ошибка в зонах положительного отклонения (на рис. 4 сплошная кривая проходит выше пунктирной), что характеризует снижение качества регулирования в этих областях. Для оценки качества управления производился подсчет среднеквадратичного отклонения за период регулирования. Цифровое представление результатов (таблица 1) показывает, что, несмотря на большее рассогласование в зонах положительного отклонения, среднеквадратичная ошибка УДК 004.032.26(06) Нейронные сети 69 ISBN 978-5-7262-1377-4. НЕЙРОИНФОРМАТИКА – 2011. Часть 3 управления в режиме МПУ2 ниже по сравнению с МПУ1 на 3,68 %, а в сравнении с ПИД-управлением ниже на 37,3 %. Это означает, что более качественное регулирование имеет место при использовании алгоритма МПУ1. 700 T,oC 695 690 МПУ1 МПУ2 685 ПИД tp 680 675 670 665 t,c 660 0 250 500 750 1000 1250 1500 Рис. 4. График температуры холодного конца печи в различных режимах управления Таблица 1 Результаты тестирования Разновидность управляющего алгоритма ПИД МПУ-регулирование с дифференциальным по модулю отклонения алгоритмом оптимизации МПУ-регулирование с дифференциальным по модулю и знаку отклонения алгоритмом оптимизации Среднеквадратичное отклонение, C 15,92 11,32 10,91 Полученные данные позволяют сделать вывод о высокой эффективности модельно-предикативного регулирования в системе управления вращающейся печи прокалки катализаторов. Выводы Основным практическим результатом повышения стабильности поддержания температуры является уменьшение показателя износа катализаУДК 004.032.26(06) Нейронные сети 70 ISBN 978-5-7262-1377-4. НЕЙРОИНФОРМАТИКА – 2011. Часть 3 тора с 0,45 до 0,32 (% /час), что снизит периодичность загрузки нового катализатора в установку на 29%. В качестве сопутствующего эффекта можно отметить повышение удельной поверхности с 670 до 750 м 2/г, что ведет к повышению степени конверсии исходного сырья по бензину с 68 до 70%. Таким образом, применение катализатора, полученного по технологии с предлагаемыми внедрениями по управлению процессом прокалки, в типовых установках каталитического крекинга модели Г-43-107 с суточной производительностью 6200 т снизит годовые затраты на приобретение катализатора на 7,38 млн. руб. и повысит прибыль за счет увеличения выхода бензина на 1,43 млн. руб. Разработанная система управления имеет большие возможности для расширения числа оптимизируемых параметров, и ее предполагается использовать в дальнейшем для управления расходом воздуха при разбавлении и подачи сырья. Список литературы 1. Хаджиев С.Н. Крекинг нефтяных фракций на цеолитсодержащих катализаторах. – М.: Химия. 1982. 277 с. 2. Pine L.A., Maher P.J. Prediction of Cracking Catalyst Behavior By a Zeolite Unit Cell Size Model // Journal of Catalysis. 2004. № 105. P. 466–476. Пупков К.А. Методы классической и современной теории автоматического управления. М.: Издательство МГТУ им. Н.Э. Баумана. 2004. 616 с. Wright S.J., Kantor J.C., Garcia C.E., and Carnahan B. Applying new optimization algorithms to model predictive control // Fifth International Conference on Chemical Process Control. CPC V. American Institute of Chemical Engineers. 1996. P. 147–155. Coleman T.F., Li Y. An Interior, Trust Region Approach for Nonlinear Minimization Subject to Bounds // SIAM Journal on Optimization. 1996. Vol. 6. P. 418–445. Coleman T.F., Li Y. On the Convergence of Reflective Newton Methods for Large-Scale Nonlinear Minimization Subject to Bounds // Mathematical Programming. 1994. Vol. 67. № 2. P. 189–224. Findeisen Rolf, Allgower Frank. An Introduction to Nonlinear Model Predictive Control. University of Stuttgart. 2002. 124 p. Haykin Simon. Neural Networks. A comprehensive foundation. Delhi, India: Pearson Education. 2003. 823 p. УДК 004.032.26(06) Нейронные сети 71