IECMSA-2013 2nd International Eurasian Conference on Mathematical Sciences and Applications
реклама

IECMSA-2013
2nd International Eurasian Conference on Mathematical Sciences and
Applications
Resource capacity of the transport of industrial conglomerates
Anatoliy Bondarenko 1
Abstract. There are approaches to solving social, transport,
technical problems on the basis of harmonious analysis algorithm of
ant colonies. The ways of forming new objectives, goals using a
simplified interface. Offered a productive function in the analysis
of movement of rolling stock and harmonious vibrations path.
Routes of administration are simulations of the distribution, game
theory in the centralized traffic control, detection of overheated
axle boxes, surface defects skating wheels. Algorithmic structural
diagrams show how the individual elements of their relationship,
subordination, which provides dynamic coordination process.
Functional concepts provide automatic control for variations in the
performance of a certain function. Moving described by differential
equations of motion of the rolling stock and control the road
conditions harmonious vibration equations.
In setting up new tasks proposed conditions of its expression is
incorrect, do not uniquely define its solution. Therefore, detailed
description of the tasks to redundancy. We express the task of
improving the smoothness of the way the linear equations that depend
on the load on the network variables: the amount of cargo,
passengers, wagons, flux and network density, speed of movement can
be regarded as a free radical. Poor conditionals of problem of
approximation is calculated by regularization, we reduce the
resolution or pseudo solution.
Keywords. Ant colony algorithm, the fluctuations of the rolling
stock, the smooth path.
AMS 2010. 68W25, 94D05.
References
[1] Stefan Tappertzhofen Messen, Steuern und Regeln mit C-Control M-
Unit 2.0.-Franzis, 2005.-240S.
[2] Bolshakov V.I. The technology of thermal and combined treatment
metal production.-Dnepropetrovsk:Gaudeamus, 2002.-390с.
[3] Tikhonov A.N. Nonlinear Ill-Posed Problems / A.N. Tikhonov, A.S.
Leonov, A.G. Yagola, Chapman and Hall, London, Weinheim, New York,
Tokyo, Melbourne, Madras, V. 1-2, 1998.
1
Priazowskyi
State
Technical
University,
Mariupol,
webmaster@comuniquehomut.com, hostmaster@6epii.com
409
Ukraine,
Ресурсoемкость транспортных промышленных
конгломератов.
1. Введение
Анализируя
географические
ресурсы
территории необходимо во множестве причин
рассматривать
и
прилегающие
водные
ресурсы,
которые
смягчают
воздействие
человека
на
природу.
Однако
природа
видоизменяется:
тают
ледники,
меняется
ландшафт, беднеет морская флора и фауна. В
такие преобразования вносит вклад водный,
воздушный, сухопутный транспорт.
Теория множеств охватывает этот класс
явлений.
Алгоритм
муравьиных
колоний
заданием функции снижения промышленного
воздействия
для
модели
колебаний
подвижного состава при движении формирует
методику вычисления, обработки, оценки базы
данных по измеренным параметрам амплитуды
и частоты колебаний. Это продлевает сроки
службы 25 метровых украинских мариупольских
рельс Azovsteel's.
Для
достижения
параметров
высокой
скорости
движения
следует
иметь
достаточное
тяговое
усилие
и
плавную
геометрию пути, что поддерживает подъемный,
средний и капитальный ремонт пути. В 2012 году
украинские
железные
дороги
выполнили
модернизацию 480 км, средний ремонт 818 км,
капитальный 735 км, потратили 1,6 млрд евро.
2. Анализ отклонений объектов при
функционировании
Системы автоматизации повышают на 50 %
пропускную
способность
дорог,
скорость
потока на 20 %, высвобождают персонал. Этому
способствуют: внедрение микропроцессорной
элементной
базы
[1]
в
управлении
переработкой,
формирования,
движении
транспорта;
пакетная
передача
с
группировкой
сигналов
новыми
каналами
связи.
Способами
введения
служат
имитационные модели распределения, теория
игр
в
диспетчерской
централизации,
обнаружения
перегретых
букс,
дефектов
поверхности катания колес.
Алгоритмические
структурные
схемы
демонстрируют
отдельные
элементы,
их
взаимосвязь,
подчиненность,
что
обеспечивает
динамичность
процесса
координации.
Функциональные
принципиальные
схемы
автоматики
предусматривают контроль за отклонениями
при выполнении некой функции.
Перемещение
описываем
дифференциальными
уравнениями
движения
подвижного
состава,
а
контролируем
дорожные условия гармоничными уравнениями
колебания:
S 0 +υ0 t +at 2− (A sin ϕ t +cosϕ t)= 0 .
Следовательно,
измеряя
параметры
колебания
А,
мы
изучаем
свойства
перемещения.
Однако
мы
измеряем
электрические
и
магнитные
сигналы
с
помощью
датчиков:
амплитуды
и
частоты
колебания, температуры, которые передаем по
беспроводному каналу на сервер, где эти
данные объединяем с параметрами управления
двигателем:
преобразования
энергии
и
торможения.
При
измерении
позиционным
терморегулятором
учитываем
три
U= (T − T eq )+∫ (T − T eq )dT /t i +td (T − T eq )/dT
составляющие:
,
сигнала
управления:
насколько
велико
рассогласование
(пропорциональный
элемент),
как
долго
сохраняется
рассогласование
(интегральный
элемент),
быстро
ли
изменяется
рассогласование
(дифференциальный элемент).
Преобразования входной величины х в
выходную у происходит за счет первичной
энергии
исходной
величины.
Стремление
ускорится
сдерживается
необходимостью
поддержания
равновесия.
Экологическая
стабильность
территорий,
континентов
базируется на устойчивости воздушного и
водного бассейнов. Для обширного анализа
используем
датчики:
параметрические
—
контактные,
реостатные,
потенциометрические,
тензометрические,
терморезисторы,
емкостные,
индуктивные,
электронные, фоторезисторы; генераторные —
термоэлектрические,
индукционные,
пьезоэлектрические,
вентильные
фотоэлементы;
сертифицированные
аналогоцифровые
преобразователи
—
микроконтроллеры,
микропроцессорные,
с
последовательным интерфейсом.
Наименее
сложные
устройства
с
последовательным
интерфейсом
энергетически
менее
затратны,
надежны,
требуют
языков
низкого
уровня
—
Basic,
машинных кодов, макросов. Акулы не брезгуют
остатками
и
поддерживают
подвижность
косяков
рыб.
В
Азовском
бассейне
акулы
встречаются
все
реже
из-за
обеднения
в
результате
отсутствия
крупных
рыб,
отсутствия мест естественного нерестилища
из-за перекрытия рек плотинами, без обводов
для
прохода
рыбы,
из-за
промышленных
и
сельскохозяйственных нужд. Оборот водных
обитателей замедляется.
Для
промышленных,
транспортных
объектов
параметры
датчиков
наиболее
регулируемы — статическая характеристика,
чувствительность, порог чувствительности,
динамическая характеристика, погрешность
преобразования,
входные
мощность
и
сопротивление, в виде таблиц параметров и
машинных
кодов,
макросов.
Для
измерения
скорости
обращения
колесной
пары
используют
генераторные,
а
для
замера
перемещения
по
вертикальной,
горизонтальной
оси
применяют
емкостные
датчики.
В кодах разряды, начиная со старших
сравниваются и если совпадают измеренные с
записанными
в
разрядах
регистров,
то
появляется сигнал — логическая 1, которая
записывается.
Сигналы
накапливаются,
оцениваются,
передаются,
макросами
отражаются графически. Шумовые отклонения
устраняются
выделением
диапазона,
что
приводит
к
переходному
процессу:
отклонениям по колесам и дороге, которые
снижают скорость, повышают аварийность и
воздействие на среду. Для дорог на илистой
почве — азовские, болотистой — днепровские, в
гористой местности — крымские, актуальность
проверки сезонная.
3. Производительная функция плавности пути
К
трудностям
автоматизации
отнесем:
разброс
массы
от
порожняка
до
тяжеловесного; растянутость и запаздывание
в торможении и ускорении, что приводит к юзу
и
буксованию,
необходимости
поддержания
режима
вождения
управлением
тягой,
корреляции с коэффициентом сопротивления,
сцепления,
поэтому
выбор
за
наиболее
нагруженными участками, потоками.
Рельсовые
стали,
обработанные
индукционным нагревом при эксплуатации —
гибче, прочнее. Для предотвращения внутри
зернистой
текстуры
и
крупной
кристаллизации рельсы подвергают отжигу с
нагревом
выше
температуры
рекристаллизации
аустенита,
затем
нормализации
или
закалке
с
высоким
отпуском от нормальных температур Ас3+500С [2].
Для уменьшения содержания водорода ниже
критического при против флокенов обработке
выдерживают 8 — 10 часов заготовки при 6500С
после
превращения
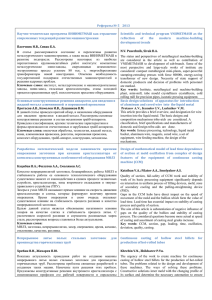
Режим
термической
закалки,
рис.1,
регулируется
микропроцессорами
по
составу
стали
и
кривизне изгиба, для обеспечения плавности
и
уменьшения
остаточных
напряжений
на
концах следует удлинить рельсы и колодцы до
100м,
что
требует
строительство
нового
рельсобалочного цеха.
Рис. 1. Режим закалки рельс.
Масса тары вагона, производимого в Azovmash,
вес
тележек,
колесной
пары
снижается,
нагрузка
на
ось
вагона
растет,
термообработка
нагревом
колес
до
0
температуры 900 С выполняется 2 часа, sprayers
сбивают окалину.
Контроль
за
обеспечением
параметров
эксплуатации:
скорости,
расходами,
выполняем
на
основании
алгоритма
муравьиных
колоний.
1
шаг,
находим
согласования
и
конфликты.
Допустим,
для
достижения
скорости
необходимы
расходы,
если их размер устраивает, то это режим
согласования, если нет то конфликта. 2 шаг,
устанавливаем
размер
колебаний,
что
приводит
к
снижению
скорости.
3
шаг,
определяем факторы, что вызывают колебания
—
колесо,
путь,
способ
вождения.
4
шаг,
устанавливаем
ограничения
по
факторам
воздействия. Цикл повторяется.
Таким образом, целевую функцию можно
определить
в
детерминированном
виде
в
переходе
от
конфликта
к
согласованию.
Данные
можно
накапливать,
оценивать,
анализировать
и
переходить
к
следующим
этапам
алгоритма.
Для
перехода
от
непрерывной функции к детерминированным
значениям
воспользуемся
гармоническим
анализом.
Периодическая функция f(x) с периодом 2 может быть приближенно представлена
в виде тригонометрического полинома. Для вычисления коэффициентов этого полинома
следует воспользоваться формулами коэффициентов
Фурье,
которые
могут
быть
вычислены
приближенно
по
любой
из
формул
механических квадратур.
Разделив интервал (0,2 ) на 4r равных
частей, обозначив абсциссы точек деления
nπ
x n=
2r и соответствующие
через
х0, х1, х2, …, х4r
(
)
им ординаты графика y = f(x) через y0, y1, y2, …, y4r ( y4r
= y0), получим приближенное представление
f (x)≈
a0 2r
∑ (a cos kx+bk sin kx)
2 k= 1 k
.
функции f(x):
Если
для
вычисления
коэффициентов
пользоваться формулой трапеций, то будем
4r
4r
4r
1
1
1
n
a0 = ∑ y
a k = ∑ y n coskx n (k = 1,2,... , 2r− 1) a2r = ∑ (− 1)n y n
2r n= 1 ;
2r n= 1
2r n= 1
иметь:
;
;
4r
bk =
1
∑ y sin kx(k= 1,2,. .. ,2r− 1) b2r = 0
2r n= 1 n
;
.
Вычисления удобно выполнять в следующей последовательности:
y1
y1
y1
...
y2r-1
y4r
y4r-1
y4r-2
y4r-3
...
y2r+1
Суммы
u0
u1
u2
u3
...
u2r-1
Разно
сти
v1
v2
v3
...
v2r-1
u2r
u2r-1
u2r-2
...
ur+1
Суммы
w0
w1
w2
...
wr-1
Разно
сти
w'0
w'1
w'2
...
w'r-1
v1
v2
v3
...
vr-1
v2r-1
v2r-2
v2r-3
...
vr+1
Суммы
z1
z2
z3
...
zr-1
Разно
сти
z'1
z'2
z'3
...
z'r-1
y2r
u2r
wr
vr
zr
Коэффициенты определяются при этом по
формулам:
r
1
a0 = ∑ w n
2r n= 0 ;
{
{
r
}
}
1
∑ w 'n coskx n при k нечетном;
2r
n= 0
a k=
r
1
∑ w cos kx n при k четном ;
2r n= 0 n
a2r =
1
(− 1)n wn ;
∑
2r
r
1
∑ z n sin kx n при k нечетном;
2r
n= 0
b k=
r
1
∑ z ' sin kx n при k четном ;
2r n= 0 n
b2r = 0.
Возможны
два
подхода
реализации
контроля
пути.
Длительный,
нанесение
на
подошву
рельса
магнитных
меток
для
отслеживания
сканером.
Наиболее
перспективен, но трудоемок, осуществим и
внесением
изменений
в
технологию
изготовления рельс производителем. Второй
подход обусловлен использованием данных с
видеокамер
и
обработкой
алгоритмами
адаптивной фильтрации: Fast Kalman, Fast Transversal Filter,
Fast a Posteriori Error Sequential Technique, быстрые алгоритмы
на
основе
обратного
QR-разложения
с
операциями и извлечения квадратного корня
и без такого.
Для
показаний
оборудуем
подвижной
состав телескопической стрелой впереди и
сзади длиной 5м, по бокам приставной на 300мм
камерой с 4 сторон, на стрелах установим
щелевые фонари с неодимовой, ксеноновой
лампой, сканерами. Камеру возьмем Lytro. Для
видео обработки используем набор Igloo фирмы
Actel
project
Video
Muxing
с
генератором
видео
синхронизации камер 3-D Flash Ladar (laser detection and
ranging);
архитектуру
CUDA
параллельных
вычислений графическими процессорами.
Состояние пути за период эксплуатации
разбиваем на сезонные периоды, это упрощает
ведение непрерывного наблюдения, как за
подвижным составом, на детерминированные
участки.
Следовательно,
за
период
эксплуатации
12
лет
замеров
будет
48,
округляем 50.
За
оценку
состояния
берем
дорогу
шириной 12м, яму 0,6м, рельс 12м, волосовину 0,5м,
т. е. в одном направлении кратность сетки 1/20
— 1/24. По оси дороги столбы каждые 30м, деревья
5м, примыкания 50м, бордюры 1,25м; головка 0,075м,
между
костылями
0,015м,
между
закладными
болтами 0,021м; яма 0,1м, раковина 0,004м; т. е.
возьмем
кратность
сетки
1/17
—
1/13.
Для
уменьшения объемов измерений контрольные
точки возьмем х, у1, 2, 3, 4 на примыканиях,
пересечениях, с устройствами сигнализации,
на остановках.
Сеть
с
дефектами,
сооружениями
в
продольном направлении сканируем лазерами,
в поперечном камерами с отклонениями по
прозрачности, насыщенности, если в темное
время, то освещаем.
Координаты х, у в продольном поперечном
направлении
формируют
основную
систему
уравнений, которая решается в отношении
дефектов
сравнением
с
предыдущей
и
допускаемыми
размерами.
Для
повышения
скорости и контроля измеряем амплитуду и
частоту колебаний подвижного состава и при
недопустимых проверяем на участках дефекты
(рис. 2).
Рис. 2. Полотно пути
—
- координаты измеренные х,у,
—
- //
- сглаживающий тренд х, у,
- дефект пути, z - z.
Дефекты
на
дороге
указываем
отклонениями
превышающими
допустимые
x− x 0 <x max ; y− y 0 < y max ; дефекты по вертикали — ямы,
бугры обнаруживаем как z− z 0 <z max .
Первая
строка
уравнения
включает
разницу по возвышенностям привязку к GPS,
вторая строка уравнения включает разницу
по
низменностям
привязку
к
инженерным
сетям. Шаг сетки описан выше. Данные по
выделению
из
сканирования
дороги
прозрачных слоев округляем функцией round и
opacity lager и вносим в стек. Для внесения новых
данных,
измеренные
отправляем
в
сеть,
выполняем динамическую реконфигурацию и
заполняем программу участка пути. Загрузку
конфигурации
выполняем
через
последовательный
интерфейс.
Используем
память микроконтроллера. Программы вносим
и изменяем через среду MPLAB. Конвертер порта
USB дает возможность подсоединять компьютер.
4. Координация решений некорректно
поставленных транспортных задач
При
постановке
новых
задач
предлагаемые
условия
ее
выражения
некорректны, не определяют однозначно пути
ее решения. Поэтому, описание таких задач
подробны до избыточности. Выразим задачу
повышения
плавности
пути
линейными
уравнениями, которые зависят от переменных
нагрузки
на
сеть:
количество
груза,
пассажиров, вагонов, густота потока, сети;
скорость движения можно рассматривать как
свободный радикал.
Плохо обусловленные задачи приближенно
вычисляем путем регуляризации, сводим к
решению или псевдо решению. Пускай для пары
{Ah , bδ} и дополнительном параметре есть
α
x ( Ah ;b δ) .
способ
построения
вектора
При
зависимости параметра (h) от ошибок
h
выходных
данных
такова,
что
lim ∥ x α(δ, h) ( Ah , bδ )− x̃ ∥= 0
δ→0
h→0
{x
(δ,h)( A ;b )}
α
h δ
множество
называют
регуляризованным семейством приближенных
решений [3], а сам способ построения вектора —
регуляризующим
алгоритмом
для
решения
системы
уравнений
раздела
3.
Задача
решается и на прерывной функции при больших
значениях А — факторах воздействия на путь и
при
малых
отклонениях
b.
Следовательно,
необходимо
при
увеличении
скорости,
стабильной нагрузке иметь малые отклонения
в геометрии пути, иначе задача не будет
сходится.
5. Заключение
Данный
подход
используем
для
этнических,
экологических,
экономических
исследований,
принимая
за
критерии
доходность,
выбросы,
интеграцию.
Как
правило,
это
выражается
в
интересах
в
отношении к собственности, принадлежности,
причастности к некоему множеству.
Литература.
1. Stefan Tappertzhofen Messen, Steuern und Regeln mit C-Control M-Unit 2.0.Franzis, 2005.-240S.
2. Большаков В.И. Технология термической и
комбинированной
обработки
металлопродукции.-Днепропетровск:Gaudeamus,
2002.-390с.
3. Tikhonov A.N. Nonlinear Ill-Posed Problems / A.N. Tikhonov, A.S. Leonov,
A.G. Yagola, Chapman and Hall, London, Weinheim, New York, Tokyo,
Melbourne, Madras, V. 1-2, 1998.
Anatoliy Bondarenko1
Resource capacity of the transport of industrial conglomerates.
Abstract
There are approaches to solving social, transport, technical problems on
the basis of harmonious analysis algorithm of ant colonies. The ways of forming
new objectives, goals using a simplified interface. Offered a productive
function in the analysis of movement of rolling stock and harmonious vibrations
path.
Keywords
Productive function, harmonic analysis, ant colony algorithm, the
fluctuations of the rolling stock, the smooth path.
AMS Subject Classification: Primary 68W25; Secondary 94D05.
1. Introduction
Analyzing the geographical territory of the resources necessary to treat
a variety of reasons and the surrounding water, which soften the impact of
humans on nature. However, nature is modified: melting glaciers, changing the
landscape, impoverished marine life. In such a transformation contributes water,
air and land transport.
Set theory covers this class of phenomena. Ant colonies assignment
algorithm functions to reduce the impact of the industrial model oscillations
rolling motion computation technique forms processing, evaluation of the
database from the measured parameters of amplitude and frequency. This extends
the service life of 25 meter Ukrainian Mariupol rail Azovsteel's.
To achieve the parameters of high-speed should be sufficient traction and
a smooth geometry of the path that supports the lifting, medium and overhaul the
way. In 2012, the Ukrainian Railways completed the modernization of 480 km, 818
km average repair, overhaul 735 km, spent 1.6 billion euros.
2. Variance analysis of objects in the operation
Automation is increased by 50% road capacity, flow rate 20% release
staff. Contribute to this: the introduction of the microprocessor component base
[1] in the management of processing, forming, traffic, packet with a group of
new channels of communication signals. Routes of administration are simulations
of the distribution, game theory in the centralized traffic control, detection
of overheated axle boxes, surface defects skating wheels.
Algorithmic structural diagrams show how the individual elements of their
relationship, subordination, which provides dynamic coordination process.
Functional concepts provide automatic control for variations in the performance
of a certain function.
Moving described by differential equations of motion of the rolling stock
and control the road conditions harmonious vibration equations:
S 0 +υ0 t +at 2− (A sin ϕ t +cosϕ t)= 0 .
Therefore, measuring the parameters of vibration А, , we study the
properties of displacement. However, we measure the electric and magnetic
1
Priazowskyi State Technical University, Mariupol, Ukraine, webmaster@comuniquehomut.com, hostmaster@6epii.com
signals through sensors: the amplitude and frequency of vibration, temperature,
which is transmitted wirelessly to a server, where these data are combined with
the parameters of motor control and power conversion braking.
When measuring the positional thermostat consider three components:
U= (T − T eq )+∫ (T − T eq )dT /t i +td (T − T eq )/dT
signal of control: how big is the
mismatch (proportional element), how long the mismatch (integral element) have a
rapid change mismatch (differential element).
Conversion of the input variable x is the output y at the expense of the
primary energy of the initial value. The desire to accelerate constrained by the
need to maintain balance. Ecological stability of territories is based on the
stability of the continent air and water. For an extensive analysis using
sensors: Parametric - contact, rheostat, potentiometer, strain gage,
thermistors, capacitive, inductive, electronic, photoresists; generator Thermoelectric, inductive, piezoelectric, photovoltaic cells gate; certified
analog-to-digital converters - microcontroller, microprocessor, a serial
interface .
The least complex devices with a serial interface is energetically less
costly, reliable, require low-level languages - Basic, computer codes, macros.
Sharks do not disdain residues and support the mobility of fish stocks. In the
Azov basin sharks are becoming increasingly rare due to depletion as a result of
the lack of large fish, the lack of availability of natural spawning grounds due
to the overlap of rivers by dams, without contours for the passage of fish, due
to industrial and agricultural needs. Turnover aquatic life slows down.
For industrial, transportation facilities most sensors are adjustable
parameters - static characteristics, sensitivity, threshold of sensitivity,
dynamic response, conversion error, the input power and resistance, in the form
of parameter tables and computer codes, macros. To measure the velocity of the
wheel pairs used generator, and to measure the vertical displacement, the
horizontal axis used in capacitive sensors.
In the codes ranks, starting with the oldest being compared and if the
same measured to the recorded bits of registers, the signal appears - a logic 1
is written. The signals are accumulated, evaluated, transferred, macros are
recorded graphically. Noise rejection eliminates the release of the range, which
leads to the transition process: departures at the wheels and the road, which
reduce speed, increase the accident rate and the impact on the environment. For
roads on the clay soil - Azov, swampy - the Dnieper, in the mountainous region the Crimean, the relevance of checking seasonal.
3. Productive easing function the way
Difficulties in automation include: the spread of the mass of empties to
heavy, prolixity, and delay in braking and acceleration, leading to skidding,
the need to maintain control rod driving modes, with a coefficient of
correlation of resistance, adhesion, so the choice for the most loaded areas,
streams.
Rail steels treated by induction heating during operation - flexible,
durable. To prevent the inside of the grain and coarse texture annealed
crystallization rails with heating above the austenite recrystallization
temperature and then normalized or quenched and tempered to the normal
temperature Ас3+500С [2]. In order to reduce the hydrogen content is below the
critical against hairline cracks in the treatment of aged 8 - 10 hours after
harvesting at 6500С transformation . Mode of heat hardening, Figure 1, is
regulated by microprocessors steel composition and curvature of the bend, to
ensure a smooth and reduce the residual stresses at the ends of the rails, and
then extend the wells up to 100 meters, which requires the construction of a new
rolling rail's.
The tare weight of the wagon, produced in Azovmash, weight bogie, wheel
pair is reduced, the load on the axle of the wagon increases, the heat treatment
by heating to a temperature of wheels 9000С performed two hours, sprayers knock
scale.
The control to provide operating parameters: speed, cost, execute based
on the algorithm of ant colonies. Step 1, we find reconciliation and conflict.
Let's say, to achieve the required rate of spending, if their size is large
enough, it is the mode of the agreement, unless there is a conflict. 2 step size
set oscillations, which reduces speed. 3 step, we determine the factors that
cause fluctuations - the wheel, the path, the way of driving. Step 4, set limits
on factors of influence. The cycle is repeated.
Thus, the objective function can be defined in a deterministic form of
the transition from conflict to agree. The data can be collected, evaluated,
analyzed, and move on to the next stages of the algorithm. To move from a
continuous function to use the deterministic values of harmonic analysis.
Periodic function f (x) with a period of 2 can be approximately
represented as a trigonometric polynomial. To calculate the coefficients of the
polynomial formulas should use the Fourier coefficients, which can be calculated
approximately by any one of formulas mechanical quadrature.
Figure 1. Heating mode rail
Dividing the interval (0,2) for 4r equal parts, denoting the abscissas
nπ
x n=
2r
of the points of division by х0, х1, х2, …, х4r
and the
corresponding ordinate graph y = f (x) through y0, y1, y2, …, y4r ( y4r = y0), we
obtain
an
approximate
representation
of
the
function
(
f (x)≈
f(x):
then
)
a0 2r
∑ (a cos kx+bk sin kx)
2 k= 1 k
.
If you use the formula for calculating the coefficients of the trapezoid,
4r
4r
1
1
a0 = ∑ y n
a k = ∑ y n coskx n (k = 1,2,... , 2r− 1)
2r n= 1 ;
2r n= 1
we
will
have
;
4r
1
a2r = ∑ (− 1)n y n
2r n= 1
;
4r
bk =
1
∑ y sin kx(k= 1,2,. .. ,2r− 1) b2r = 0
2r n= 1 n
;
.
The calculations are conveniently performed in the following sequence:
y1
y1
y1
...
y2r-1
y4r-1
y4r-2
y4r-3
...
y2r+1
Sum u0
u1
u2
u3
...
u2r-1
Difference
s
v1
v2
v3
...
v2r-1
u2r
u2r-1
u2r-2
...
ur+1
Sum
w0
w1
w2
...
wr-1
Difference
s
w'0
w'1
w'2
...
w'r-1
v1
v2
v3
...
vr-1
v2r-1
v2r-2
v2r-3
...
vr+1
Sum
z1
z2
z3
...
zr-1
Difference
s
z'1
z'2
z'3
...
z'r-1
y4r
The coefficients are determined with the following formulas:
r
a0 =
1
∑w
2r n= 0 n ;
y2r
u2r
wr
vr
zr
{
{
r
}
}
1
∑ w 'n cos kx n by k odd ;
a k = 2r n=r 0
1
∑ w coskxn by k even ;
2r n= 0 n
a2r =
b k=
1
(− 1)n wn ;
2r ∑
r
1
∑ z sin kx n by k odd ;
2r n= 0 n
r
1
∑ z ' sin kx n by k even ;
2r n= 0 n
b2r = 0.
There are two approaches of the control way. Long, applying to the rail
foot of magnetic labels for tracking scanner. The most promising, but labor
intensive feasible and changes in the technology of producing rail manufacturer.
The second approach is due to the use of data from cameras and processing
algorithms for adaptive filtering: Fast Kalman, Fast Transversal Filter, Fast a
Posteriori Error Sequential Technique, fast algorithms based on the inverse QRdecomposition of operations and taking the square root, and without this.
For reading equip rolling stock telescopic front and rear 5m, flanked by
addl 300mm camera with 4 sides, on booms to set the slotted neodymium lights,
xenon lamp, scanners. Take the camera Lytro. To use a set of video processing
Igloo company Actel project Video Muxing video sync generator with cameras 3-D
Flash Ladar (laser detection and ranging); CUDA parallel processing architecture
of the graphics processors.
Track condition for service life split into seasonal periods, it
simplifies the management of continuous monitoring, both for rolling stock on
the deterministic areas. Consequently, during the period of operation of 12
years of measurements is 48, 50 is rounded.
For the assessment of the state road take a 12 m wide and 0.6 m pit, rail
12m, check crack 0.5 m, that is in one direction the multiplicity of grid 1/20 1/24. On the road axis pillars every 30m, 5m trees, abutting 50m, curbs 1.25 m
head of 0,075 m, 0,015 m between the rail spikes, between tensioning bolted
0,021 m, 0.1 m pit, sink 0,004 m, that is we take the multiplicity of the grid
1/17 - 1/13. To reduce the volume measurement checkpoints take x, y1, 2, 3, 4 at
junctions, intersections, with alarm devices, at the stops.
Way with defects constructions in the longitudinal direction of the laser
scan in cross cameras with disabilities in the transparency, saturation, if in
the dark, then light up.
X, y coordinates in the longitudinal direction of the cross form the
basic system of equations which is solved for defects by comparison with the
previous and the permissible size. To increase the speed and control measure
amplitude and frequency of vibration of rolling stock and invalid check on plots
defects (Fig. 2).
Figure 2. The road surface of the railway
- the coordinates of the measured x, y,
- - - smoothing trend x0, y0,
/ / - defect in way, z - z0.
Defects on the road indicate the deviation exceeds the permissible
x− x 0 <x max ; y− y 0 < y max ; defects vertically - pits, hillocks find how z− z 0 <z max .
The first line of the equation involves the difference in elevations bind
to the GPS, the second line of the equation involves the difference in the
lowlands bind to utility services. Step grid described above. Release data from
scanning the road transparent layers rounding function round and opacity lager
and introduce into stack. For entering the new data measured send to the network
to perform dynamic reconfiguration and fill the program section of the path.
Loading configurations are performed through a serial interface. Use the memory
of the microcontroller. Programs are making and change through the medium of
MPLAB. Converter USB port allows you to connect your computer.
4. Coordination of transport solutions of incorrectly posed problems
In setting up new tasks proposed conditions of its expression is
incorrect, do not uniquely define its solution. Therefore, detailed description
of the tasks to redundancy. We express the task of improving the smoothness of
the way the linear equations that depend on the load on the network variables:
the amount of cargo, passengers, wagons, flux and network density, speed of
movement can be regarded as a free radical.
Poor conditionals of problem of approximation is calculated by
regularization, we reduce the resolution or pseudo solution. Let him for a
A ,b
couple { h δ } and an additional parameter is a method for constructing the
α
vector x ( Ah ;b δ) .
At the dependence of the parameter (h) of the errors h output data
lim ∥ x α(δ, h) ( Ah , bδ )− x̃ ∥= 0
δ→0
{x
(δ,h)( A ;b )}
α
h δ
such that the h→0
set
is called a regularized
family of approximate solutions [3], and the method of construction of the
vector - a regularizing algorithm for solving a system of equations in Section
3. The problem is solved by a discontinuous function at large values
A factors that impact on the way and for small deviations b. Consequently, it is
necessary for increasing the speed, stable load condition have small deviations
in the geometry of the path, otherwise the task is not convergent.
5. Conclusion
This approach is to use ethnic, environmental, economic research, taking
the criteria of profitability, emissions, integration. Typically, this is
expressed in the interest in relation to the property, belonging, implication to
a certain set.
References.
1. Stefan Tappertzhofen Messen, Steuern und Regeln mit C-Control M-Unit 2.0.Franzis, 2005.-240S.
2. Большаков В.И. Технология термической и
комбинированной
обработки
металлопродукции.-Днепропетровск:Gaudeamus,
2002.-390с.
3. Tikhonov A.N. Nonlinear Ill-Posed Problems / A.N. Tikhonov, A.S. Leonov,
A.G. Yagola, Chapman and Hall, London, Weinheim, New York, Tokyo,
Melbourne, Madras, V. 1-2, 1998.
Аннотация
Предусмотрены
подходы
в
решении
общественных,
транспортных,
технических
задач
на
основе
гармоничного
анализа,
алгоритма муравьиных колоний. Рассмотрены
пути формирования новых задач, достижений
целей
с
применением
упрощенного
интерфейса. Предлагается производительная
функция при анализе перемещения подвижного
состава и гармоничного колебания пути.
Abstract
There are approaches to solving social, transport, technical problems on
the basis of harmonious analysis algorithm of ant colonies. The ways of forming
new objectives, goals using a simplified interface. Offered a productive
function in the analysis of movement of rolling stock and harmonious vibrations
path.
Ключевые слова
Производительная функция, гармоничный
анализ,
алгоритм
муравьиных
колоний,
колебания
пути.
подвижного
состава,
Keywords
Productive function, harmonic analysis, ant
fluctuations of the rolling stock, the smooth path.
плавность
colony
algorithm,
the