2.4.13. Алгоритмические способы повышения эффективности
реклама

2.4.13. Алгоритмические способы повышения эффективности
метода комбинирования эвристик
В сложных задачах структурного синтеза количественная
оценка
эффективности того или иного метода или алгоритмического приема, как
правило, выполняется на основе численных экспериментов на некоторых
тестовых задачах. Далее приведены результаты таких экспериментов.
Тестовой для синтеза многостадийных расписаний выбрана задача N105 с
исходными данными: число работ N=105, число стадий обслуживания каждой
работы q = 4, общее число обслуживающих аппаратов (серверов) М= 15. В
качестве тестовых использовались также две задачи меньшего размера N21 и
N25, отличающиеся от N105 числом работ, в них соответственно N равно 21 и
25.
Приведенные далее результаты численных экспериментов в случае маршрутизации транспортных средств получены в тестовых задачах VRP_37 и
VRP_80. Исходные данные для VRP_80: число узлов транспортной сети w =
80, число заказов g = 25, число узлов - источников продуктов z = 40, число
серверов (единиц транспортных средств) т = 12, число типов перевозимых
продуктов р = 2 (для VRP_37 соответственно w = 37, g = 10, z = 20, т = 12,
р = 2).
В известных генетических алгоритмах при решении сложных задач большой
размерности типичным является характер приближения к решению, в котором
скорость улучшения значений целевой функции в процессе поиска экстремума
постепенно уменьшается и может наступить стагнация популяции при значениях
целевой функции, существенно отличающихся от оптимальных. Поэтому
необходимо использовать различные способы как ускорения сходимости, так и
преодоления стагнации на уровнях, далеких от экстремума.
Наиболее радикальным направлением преодоления ранней стагнации
является применение многопопуляционных генетических алгоритмов и/или
гибридных алгоритмов.
В многопопуляционных генетических алгоритмах, иначе называемых
параллельными алгоритмами на уровне популяций, выполняется имитация
эволюции нескольких популяций при ограниченных связях между ними. Каждая
популяция размером N эволюционирует автономно на протяжении L поколений.
Затем происходит частичный обмен представителями между популяциями и
начинается новый цикл автономного развития. Циклы автономного развития и
межпопуляционного обмена повторяются до наступления признаков стагнации у
всех популяций.
Схемы межпопуляционного обмена могут быть довольно разнообразными.
Например, популяция с номером i передает своих k представителей в популяцию с
номером i + 1 (последняя популяция при этом посылает своих представителей в
первую популяцию). Чаще всего эти k представителей выбираются среди
лучших экземпляров хромосом. Числа L и k могут варьироваться.
Очевидно, что многопопуляционные генетические алгоритмы могут обеспечить
более высокую степень приближения к глобальному экстремуму хотя бы потому,
что при стагнации вблизи локальных экстремумов эти алгоритмы приводят в
лучший из r локальных экстремумов (r - число популяций). Платой за более высокую точность решения задач является увеличение вычислительных затрат. Так,
на однопроцессорной ЭВМ затраты машинного времени увеличиваются примерно
в г раз по сравнению с затратами при применении однопопуляционного
генетического алгоритма с одним и тем же значением размера популяции N.
Под гибридным алгоритмом понимают сочетание алгоритмов двух типов:
первый тип представлен генетическим алгоритмом, ко второму типу отнесены
алгоритмы локальной оптимизации, оперирующие единственной хромосомой (или
популяцией хромосом, но без применения кроссовера). Поэтому гибридные
алгоритмы называют также локально-генетическими.
В локально-генетических алгоритмах после каждого акта генерации двух
потомков к каждому из них (или только к лучшему) применяется процедура
локального поиска. Она заключается в выполнении макромутации и оценке
целевой функции F для мутированной хромосомы. Если F улучшилась, то
выполненная макромутация принимается, иначе делается новая попытка
улучшить хромосому с помощью новой макромутации. Локальный поиск
завершается после К неудачных попыток улучшения потомка.
Формализованное описание одного из вариантов локально-генетического
алгоритма - процедуры LGA1, реализующей эволюционный стохастический спуск
(stochastic hillclimbing), можно представить в следующем виде:
F = fitfun(CC); /*fitnui - процедура вычисления значения целевой функции,
реализует структурно-критериальную модель, СС - хромосома*/
i = 0;
while (i< К) /*К обычно составляет (0,2 ... 0,5)*n, где п - число генов в
хромосоме*/
{i++;
случайный выбор R локусов в хромосоме и новых случайных аллелей в них;
СС1 = текущая хромосома;
z = fitfun(CCl);
if (z < F) {СС = CC1; F = z; i = 0;}
}
Здесь К - глубина локального поиска, т.е. максимально допустимое число
идущих подряд безуспешных попыток улучшить результат локального поиска; R размер макромутации, т.е. число изменяемых генов на данном шаге локального
спуска.
Для иллюстрации преимуществ локально-генетического подхода сравнивались
результаты
решения
задач
с
помощью
генетических
алгоритмов
простого
однопопуляционного (ОГА), многопопуляционного (МГА) и локально-генетического
алгоритма (ЛГА). Сопоставление ОГА и ЛГА на задаче синтеза расписаний N21 при
ограничении числа вычислений целевой функции F в проводимых экспериментах
значением 10 000 дало значения F, приведенные в табл. 2.1, где Np - размер популяции.
Отметим, что в этой задаче синтеза расписаний F есть цена расписания, которая
минимизируется.
Таблица 2.1
Алгоритм
ОГА
Np=25
Np = 37
Np =75
8666
7755
7756
ЛГА:
при K=4
7747
7707
7711
при K=10
7740
7712
7699
=
Эксперименты на задаче синтеза расписаний N105 показали, что ЛГА по эффективности не уступает МГА. Исследование МГА проводилось с помощью программы
параллельного генетического поиска GALOPPS. Использовалось восемь параллельных
популяций с размером N , популяции обменивались своими представителями после
каждых пяти смен поколений. В каждом варианте расчета было выполнено 24 цикла по
пять смен поколений. Значение целевой функции F, усредненное по ряду вариантов
расчета с различными размерами популяции (от 27 до 60), оказалось равным 22 050.
В то же время десять вариантов решения той же задачиШ05 с помощью ЛГА при
использовании локально-генетического алгоритма LGA1 с К = 120 и размером
популяции 13 дало значения целевой функции F в диапазоне 21 956. ..22 053 со средним
значением 22 005.
Эффективность локально-генетических алгоритмов существенно зависит от
ряда факторов. Основными среди них следует назвать используемый набор
эвристик, вероятности их выбора в операторах мутации и формирования
начального поколения, глубину локального поиска, размер макромутаций.
Управление эвристиками включает, во-первых, формирование рабочего
набора эвристик из числа возможных сочетаний правил для разных частей
задач, во-вторых, выбор вероятностей использования эвристик в процессе
решения задачи.
Кандидатами на включение в рабочий набор при наличии S частей подзадач и
г правил для каждой из них являются rS разных эвристик. Однако на практике
используют
только
небольшое
число
возможных
эвристик.
Так,
в
экспериментах на задачах VRPTW в трех подзадачах использовались
соответственно три, два и три правила, т.е. общее число возможных эвристик
18. В рабочий набор были включены пять эвристик:
(S1Q2V1) , (S3,Q1V1(S1Q1y2, (S2,Q2,V2), (S1Q1V3).
В многостадийных задачах синтеза расписаний использовалось восемь
эвристик. Эвристики Э1, Э2, Э3, Э7 непосредственно ориентированы на снижение
цены обслуживания работ, Э4, Э5, Э6, Э8 - на сокращение времени обслуживания,
кроме того, эвристики Э7 и Э8 направлены на первоочередное снижение затрат
на переналадки серверов.
Часто первоначальное включение эвристик в рабочий набор выполняется
по субъективным предпочтениям. Однако в выбор эвристик можно вложить и
объективное содержание. В частности, можно руководствоваться результатами
применения приведенного далее алгоритма А1, т.е. сравнением результатов
автономного использования эвристик (см. такие результаты для задачи N25 в
табл. 2.2, а для задачи VRPTW - в табл. 2.3).
Если
прогнозируется
получение
решения
с
нарушением
ограничений,
приводящим к незначительным штрафам, то отбор эвристик в задачах синтеза
расписаний следует проводить, ориентируясь на значения Z (табл. 2.2). В противном
случае нужно усиливать роль эвристик с временной ориентацией. В задаче N25 прогноз
благоприятен, и в набор были включены эвристики Э1, Э2, Э6 и Э8. При этом
целесообразно для более перспективных эвристик увеличивать вероятности их выбора в
операторах мутаций и генерации начального поколения. В экспериментах в случае задачи
N25 вероятности выбора эвристик Э1, Э2, Э6 и Э8 взяты в отношениях 2:1:1:4. При этом
средний по нескольким вариантам результат применения простого генетического
алгоритма оказался F= 5371, в то время как равновероятное использование всех восьми
эвристик дало F = 5536.
Та б л ища 2.2
Эвристика
Э1
Э2
Э3
Э4
Э5
Э6
Э7
Э8
F в N25
Z в N25
(целевая функция)
(F без учета штрафов)
8848
6970
9179
10259
6091
6006
8076
12381
5678
5806
5970
6099
5951
5866
5946
5191
Аналогичные результаты получены и при решении задачи N105. Равновероятное
применение всех восьми эвристик в простом генетическом алгоритме дало после 100
смен поколений значение целевой функции F, усредненное по нескольким вариантам
расчета, равное 22 607, а использование набора из трех перспективных эвристик значение 22 424.
Использование фиксированных наборов эвристик не всегда приводит к
удовлетворительным результатам. Это прежде всего относится к задачам с
трудно выполнимыми жесткими ограничениями. Так, преобладание эвристик
с ценовой ориентацией не позволяет эти ограничения удовлетворить, а
преобладание эвристик с временной ориентацией приводит к стагнации при
значениях F, заметно отличающихся от оптимального. Поэтому полезен алгоритм, в котором вероятности эвристик меняются после удовлетворения
жестких ограничений.
Таким образом, необходимо иметь алгоритм определения рациональных
значений вероятностей использования эвристик в процедурах мутации и
генерации начального поколения. На роль такого алгоритма претендуют
следующие варианты.
А1 Алгоритм выбора вероятности qi использования i-й эвристики по
результатам применения каждой эвристики в отдельности. Вероятность qi
выбирается тем большей, чем лучше результат применения i-й эвристики:
где Fi. - значение целевой функции при использовании единственной i-й
эвристики; v - число эвристик.
Как показали результаты численных экспериментов, в случае синтеза
расписаний этот алгоритм можно использовать в задачах с нежесткими
ограничениями, причем при выборе q. штрафы за нарушение ограничений в Fi.
учитываться не должны.
А2..Алгоритм пробного прогона задачи, при котором
(2.6)
где li - число генов с номером i-й эвристики в лучшей хромосоме после
пробного просчета, соответствующего одному-двум поколениям; п - общее
число генов в хромосоме. Другими словами, q есть частость появления номера
i-й эвристики в лучшей из имеющихся хромосом.
А3..Самонастраивающийся алгоритм, при котором qi для k-го поколения
определяется по формуле (2.6), в которой li подсчитано по лучшей хромосоме
(k— 1)-го поколения.
Результаты расчетов целевой функции с помощью алгоритма А1 ,соответствующие
использованию каждой эвристики в отдельности, приведены в табл. 2.3, где Fi. и Zi.значения целевой функции при использовании i-й эвристики с учетом и без учета
штрафов соответственно.
Таблица 2.3
Эвристика
Правила (VRPTW)
Fi. / Zi, (VRP-80)
Э1
S1, Q2, V1
Э2
S3 ,Q1 ,V1
1638/648
Э3
S1, Q1 ,V2
1407/1307
Э4
S2 ,Q2, V2
1516/1416
Э5
S1, Q1 ,V3
816/796
705/505
В табл. 2.4 приведены результаты нескольких вариантов решения задачи VRP-37,
полученные к 30-му поколению, EV ≈ 5400, NP = 21 (простой генетический алгоритм
выполнялся при NP = 100). В этой задаче наилучшие результаты зафиксированы при
использовании самонастраивающегося алгоритма A3. Отметим, что затраты машинного
времени на решение задачи невелики: на ЭВМ IBM Pentium 100 МГц - 1,7 с на 100
оценок целевой функции, т.е. не более 2 мин на полное решение задачи.
Таблица 2.4
Метод
Простой генетический алгоритм
Гибридный НСМ:
с равными значениями qi
для всех эвристик
с алгоритмом A1
с алгоритмом А2
с алгоритмом А3
Значения целевой функции F в
отдельных вариантах решения
Среднее
значение F
543; 578; 593; 598; 663
595
516; 529; 545; 548; 577
495; 495; 496; 506; 569
496; 503; 510; 522; 542
494; 495; 503; 504;504
543
512
515
500
Данные табл. 2.1-2.4 интересны также тем, что они свидетельствуют о преимуществе НСМ перед обычными эвристическими методами решения задач дискретной
оптимизации. Так, в задаче VRP_37 лучший из эвристических методов дал значение
целевой функции F = 705, в то время как НСМ с алгоритмом А3 обеспечивает получение
значений .F в диапазоне 494...504.
Интересно отметить, что зафиксированная в задаче N25 эффективность мало зависит
от параметра NP,варьируемого в пределах 13...70, и параметра .К, варьируемого в
пределах 20...90. Слабая зависимость эффективности от N в НСМ обусловлена наличием
локального поиска.
Макромутация - одновременное изменение в хромосоме значений более чем
одного гена. Макромутации лежат в основе локального поиска в эволюционногенетических алгоритмах, они предназначены для улучшения целевой функции
между операциями кроссовера.
Управление
макромутациями
подразумевает
принятие
решений
по
генов
в
следующим вопросам:
• позиционирование
расположение
-
мутируемых
хромосоме;
• размер
макромутации
R
число
-
мутируемых
генов
на
одном
шаге локального поиска;
• глубина
идущих
макромутаций
подряд
-
безуспешных
максимально
попыток
допустимое
улучшить
число
результат
К
локаль
ного поиска.
В большинстве задач возможны два основных способа позиционирования:
LGA1 - распределенный случайный и LGA2 - сосредоточенный регулярный. В
LGA1 позиция каждого мутируемого гена выбирается случайно с равной
вероятностью р - 1/п, п - число генов в хромосоме. В LGA2 множество
мутируемых генов составляют гены, расположенные в соседних локусах,
случайным образом выбирается лишь позиция первого гена последовательности среди п - R первых генов.
В некоторых задачах, имеющих то или иное секционирование, возможны
дополнительные схемы позиционирования. Примерами таких задач могут
служить многостадийные задачи синтеза расписаний. Для них используют
также локально-генетический алгоритм LGA3, реализующий распределенный
регулярный способ позиционирования.
Алгоритм LGA3 отличается от LGA1 тем, что R = rq, r = 1 или 2, q - число
стадий, случайно выбирается только локус среди первых N позиций, локусы
отстоят друг от друга на N позиций (N - число работ). Такой поиск назовем
вертикальным в отличие от горизонтального поиска в алгоритме LGA2.
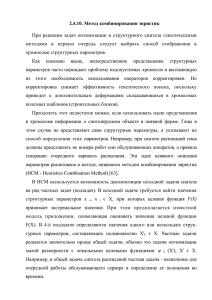
Пояснить все три способа позиционирования можно с помощью рис. 2.18, на
котором
хромосома
для
многостадийных
задач
синтеза
расписаний
представлена в виде матрицы С. Ее элемент Сki есть ген, относящийся к i-му
шагу синтеза на k-й стадии. В LGA2 одновременной мутации подвергается R
генов с последовательными номерами i, что и обусловливает название
«горизонтальный
поиск».
В
LGA3,
наоборот,
мутируют
гены
с
последовательными номерами k, т.е. вертикально расположенные в матрице С.
Обоснование алгоритмов LGA2 и LGA3 связано с понятиями эпистасиса и
хромосомных блоков (building blocks). Эпистасис определяется как нелинейная
зависимость, при которой на значение целевой функции влияют не только
значения некоторых i-го и j-го генов, взятых в отдельности, но и их совместное
наличие в определенных позициях (локусах) хромосомы. Хромосомный блок совокупность таких значений некоторых генов, связанных эпистасисом, задание
которых положительно влияет на целевую функцию.
*- LGA1
+-LGA2
- LGA3
Рис.2.18. Хромосома - матрица С и подмножества iмутируемых локусов в OSSP
при использовании
Успех генетического поиска определяется именно заполнением хромосомы
хромосомными блоками. Очевидно, что вероятность нахождения при локальном
поиске хромосомного блока повышается, если одновременно варьировать
значения тех генов, которые связаны эпистасисом. А такая связь наиболее
вероятна, во-первых, между генами в соседних локусах, что и учитывается в
LGA2, во-вторых, между генами в локусах, относящихся к одним и тем же
позициям в очередях работ на каждой стадии, что и определяет в алгоритме
LGA3 величину N, на которую локусы отстают друг от друга.
Важно отметить, что регулярный поиск оказывается более эффективным в
таких задачах, как синтез расписаний или упаковка грузов в контейнеры. В то
же время для задач VRPTW преимуществ LGA2 перед LGA1 не зафиксировано,
что свидетельствует о слабом влиянии позиции гена или отсутствии такового на
вхождение или невхождение гена в хромосомные блоки.
Преимущества LGA2 перед LGA1 зафиксированы при решении OSSP. В
табл. 2.5 приведены значения F (усредненные по нескольким вариантам решения задач N25 и N105 синтеза расписаний), полученные после 18 смен
поколений (около 36 тыс. оценок целевой функции) при размере популяции 13 и
значениях параметров К= 60 u R = 8. Следует отметить, что в задачах синтеза
расписаний для локально-генетических алгоритмов LGA1 и LGA2 не замечено
существенного влияния параметра R, выбираемого в диапазоне 4...12, на
результаты решения.
Для LGA3 предпочтительным оказалось R = 8.
Таблища 2.5
Задача
N25
N105
LGA1
5306
LGA2
5301 21932
LGA3
5298 21917
22005
Заметные погрешности решения некоторых задач, как правило, обусловлены
ранней стагнацией. Ее преодоление возможно путем существенного обновления
состава популяции с помощью принудительных макромутаций, называемых
Re-стартом. В рассмотренных генетических алгоритмах любая макромутация,
не приводящая к улучшению F для мутируемой хромосомы, отвергалась и не
отражалась в новом поколении. Принудительная макромутация отличается тем,
что ее результаты принимаются в любом случае.
Применение Re-старта затрагивает проблему элитизма. Под элитизмом
принято понимать принудительное включение в каждое очередное поколение
лучшего представителя предыдущего поколения. Очевидно, что элитизм
гарантирует сохранение уже достигнутой степени приближения к экстремуму,
но при этом затрудняет выход из областей притяжения промежуточных локальных экстремумов, т.е. увеличивает вероятность ранней стагнации. В алгоритмах
НСМ элитизм применяется в связи с небольшими значениями Np.Но в
процедуре Re-старта необходимо от элитиз ма отказаться и начинать отсчет
достигнутого минимального значения функции полезности заново после каждой
принудительной макромутации.
Что касается влияния глубины локального поиска К на эффективность
решения, то можно отметить не ярко выраженное повышение эффективности с
ростом К в диапазоне (0,1...0,8)n (но при этом, естественно, растут и затраты
времени на решение).
Фильтрация - один из способов повышения эффективности генетического поиска,
в частности преодоления ранней стагнации. Известен ряд схем фильтрации.
Идея фильтрации используется достаточно широко. Например, такой
необходимый в генетическом алгоритме оператор, как селекция, фактически
реализует фильтрацию - отбрасывание неудачных хромосом, генерируемых в
операторах кроссовера или мутации. Одним из примеров фильтрации может
служить упомянутый выше макрооператор Re-старт, который предназначен для
преодоления ранней стагнации и заключается в переходе от текущего поколения к
новому начальному поколению путем полной или частичной замены значений
генов во всех хромосомах.
В разрабатываемых для НСМ локально-генетических алгоритмах можно
использовать несколько стадий фильтрации, причем одним из требований
является
экономичность
-
малые
затраты
времени
на
возникающие
дополнительные вычисления.
Сначала формируется исходное поколение. При этом фильтр Ф1 осуществляет
среди генерируемых случайным образом хромосом отбор тех, у которых целевая
функция лучше некоторого порогового значения TS1, т.е. F < TS1. Отобранные в
Ф1, хромосомы подвергаются процедуре П1 локального улучшения с некоторой
глубиной локального поиска Кнп и поступают на фильтр Ф2, в котором отбираются
члены исходного поколения по условию F < TS2.
В процессе локально-генетического поиска могут использоваться также фильтры
Ф3 и Ф4, аналогичные по своему назначению фильтрам Ф1 и Ф2. В Ф3 проходят
отбор дочерние хромосомы, получаемые в результате кроссовера, по условию F <
TS3. В Ф4 фильтруются хромосомы, которые после Ф3 прошли также через процедуру П2 локального спуска.
Результаты проведенных числовых экспериментов свидетельствуют в пользу
применения фильтров Ф1, Ф2 и Ф3. В Ф1 фигурировал постоянный порог TS1 = const
(для конкретной задачи). То же относится к Ф2, где TS2 < TS1. В Ф3 использовался
плавающий порог:
TS3=G + delta;
if(F < TS3)
{success; b = delta – a1*Fmin; if (Ъ >= 0) delta= b}
else
(
the
individual
is
discarded;
delta
=
delta
+a2*Fmin;}
Здесь G, a1 и a2 - постоянные коэффициенты; Fmin - лучшее из значений целевой
функции, достигнутое к данному моменту поиска.
Возможны и другие способы фильтрации, например отбор лучших экземпляров
среди множества полученных кандидатов.
В табл. 2.6 представлены результаты экспериментов, полученные после приблизительно
32,5 тыс. обращений к процедуре вычисления целевой функции F в каждом прогоне на задаче
синтеза расписаний N25 и после 30...36 тыс. обращений на задаче N105.
Таблица 2.6
№ п/п
1
2
3
4
Вариант задачи
N25
F Fср
N105
F
Fср
Обычный эвристический метод - 6006 _ 23377 _
использование единственной эвристики (лучшей из восьми)
Случайный выбор (метод Монте- 5585 _ 22747
Карло) со всеми восемью эвристиками
Простой генетический алгоритм 5524; 5536 _
22607
со всеми восемью эвристиками без
фильтрации: Np=70
Как в № 3, но с использованием
отобранного подмножества из че-
5547;
5538
5356; 5371
5366;
22424
тырех эвристик (q1: q2: q6: q8=2:1:1:4)
5390
Случайный выбор по методу
Монте-Карло с подмножеством из
четырех эвристик
5430; 5409
5387;
5409
6
Локальный поиск (hillclimbing) без
кроссовера
7
Как в № 4, но с использованием
фильтра Ф1и локального спуска П1
5401; 5419
5425;
5431
5355; 5385
5389;
8
Как в № 4, но с использованием
Ф1, П1 и Ф2
9
Как в № 4, но с использованием
также Ф3
5
10
LGA2 (используются Ф1,Ф2, Фз, П1
П2и алгоритм выбора эвристик A i)
11
Какв№ 10, но LGA3
№
п/п
_
_
_
_
22352
5412
5359; 5371
5397;
_
22283
5358
5345; 5347
5315,
5381
_
5310; 5301
5296;
5297
5300; 5309
5321;
5305
Вариант задачи
12
Как в № 10, но с комбинацией LGA2 и LGA3
(отношение вероятностей их применения 7:3)
_
_
_
Окончание табл. 2.6
N25
N105
F
Fср
F
Fср
5288;
5276;
5294;
5279;
21852;
21923;
5285 21933;
21936;
5286;
5284
21932
21953;
21960;
21968
Приведенные результаты экспериментов позволяют сделать следующие
выводы.
1.
Моноэвристичные
методы
существенно
уступают
по
точности
решения методам комбинирования эвристик.
Так, в четырехстадийной задаче OSSP с 105 работами и 15 серверами (задача
N105) использовалось восемь различных эвристик. При использовании одной
единственной эвристики лучшее из восьми вариантов моноэвристичного
решения задачи значение цены расписания оказалось F (X) = 23377 $, что
соответствует относительной погрешности 7,0 % по отношению к лучшему
известному в этой задаче результату F (X) = 21852 $ (полученному с помощью
НСМ). В задачах размещения и компоновки погрешности еще больше и
составляют десятки процентов.
2.
Случайная комбинация эвристик может дать результат лучше,чем в
моноэвристичном методе.
Так, в той же задаче OSSP в 1000 статистических испытаниях получен
лучший результат F (X) = 22747 $, т.е. погрешность составляет уже только 3,9
%. Однако по-прежнему в ряде других задач погрешности намного выше.
3.
Как генетический, так и локальный поиск по отдельности не
достаточно
эффективны.
повышается
при
Эффективность
использовании
решения
задач
локально-генетического
синтеза
метода.
В
соответствии с этим методом применяется локальная оптимизация по
отношению
к
каждой
хромосоме,
порождаемой
в
результате
кроссовера. Она заключается в случайном поиске лучшего решения в
окрестностях хромосомы потомка (при этом расстояния между хромосомами
измеряются числом позиций с неодинаковыми значениями).
Так, в задаче маршрутизации транспортных средств локально-генетический
метод позволил повысить точность решения примерно на 10 %. Локальногенетические алгоритмы также превосходят по эффективности случайный
метод поиска (метод Монте-Карло).
4.Погрешности
решения
генетическими
методами
снижаются
при удачном наборе эвристик. Поэтому в используемых алгорит мах
предусмотрена автоматическая настройка вероятностей использования
эвристик в операторах мутации, что порождает тенденцию к их оптимизации.
Если использовать предварительно
определенный
рациональный
набор
эвристик, то при случайном выборе последовательности эвристик из такого
набора и использовании локально-генетических алгоритмов погрешности
снижаются приблизительно до 3,0 % (после 1000 испытаний в соответствии с
методом Монте-Карло).
5. Типичные значения числа оценок целевой функции Nv , характеризующего
трудоемкость генетических алгоритмов, составляют десятки-сотни тысяч.
Благодаря НСМ трудоемкость можно существенно снизить.
Уже с помощью случайно выбираемых последовательностей эвристик (т.е. в
соответствии с методом Монте-Карло) после Nv = 20 испытаний (шагов) в задаче
N105 велика вероятность получения решения с погрешностью 3,9.. .4,5 %, после
100 испытаний — с погрешностью 3,1...3,7 %. Однако дальнейшее уменьшение
погрешности при применении метода Монте-Карло, в отличие от метода НСМ,
маловероятно.
6. Фильтрация способствует повышению эффективности решения задач.
Для решения с помощью НСМ упомянутой выше задачи N105 с 105 работами
требуется не более 15 мин работы ЭВМ Pentium-2-ЗЗО (при Nv = 36 тыс.).
Повышение
(степени
эффективности
приближения
к
выражается
экстремуму)
и/или
в
большей
в
большей
точности
скорости
сходимости к приемлемому результату. Так, в задаче синтеза расписаний с
помощью НСМ удавалось получать более точные результаты за отрезок
времени, оцениваемый 30...40 тыс. обращений к процедуре вычисления целевой
функции, чем в альтернативных генетических алгоритмах при в несколько раз
большей трудоемкости .