Лабораторная работа 104
реклама

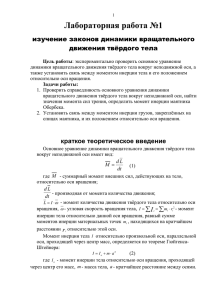
Федеральное агентство по образованию Волгоградский государственный технический университет Кафедра “Экспериментальная физика” ИЗУЧЕНИЕ ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА Методические указания к лабораторной работе №104 Волгоград 2007 УДК 53 (075.5) . Изучение динамики вращательного движения твердого тела: метод. указ. к лабораторной работе №104/ сост. А.А. Аксенов, А.В. Аршинов, А.С. Трусов; Волгоград. гос. техн. ун-т. – Волгоград, 2007. -14 с. Cодержат основные сведения и рекомендации по выполнению лабораторной работы № 104, представленной в практикуме кафедры экспериментальной физики Волгоградского государственного технического университета. Предназначены для студентов всех форм обучения. Ил. 5. Табл. 3. Библиогр.: 3 назв. Рецензент: доц. Е.Н. Свежинцев. Печатается по решению редакционно-издательского совета Волгоградского государственного технического университета Составители: Анатолий Александрович Аксенов Александр Викторович Аршинов Алексей Станиславович Трусов. ИЗУЧЕНИЕ ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА. Методические указания к лабораторной работе №104. Темплан 2007 г. поз. № Подписано в печать . Формат 60x84 1/16. Бумага газетная. Печать офсетная. Усл. печ. л. Тираж 300 экз. Заказ . Бесплатно. . Волгоградский государственный технический университет. 400131 Волгоград, просп. им. В.И. Ленина, 28. РПК “Политехник” Волгоградского государственного технического университета. 400131 Волгоград, ул. Советская, 35. © Волгоградский государственный технический университет, 2006. Лабораторная работа № 104. Изучение динамики вращательного движения твердого тела. 104.1. Цель работы. Экспериментальное изучение динамики вращательного движения твердого тела и определение момента инерции грузов маятника Обербека. 104.2. Содержание работы. Основной закон динамики вращательного движения можно записать в следующем виде: dL M (104.1) dt скорость изменения момента импульса L тела, вращающегося вокруг непод вижной точки, равна результирующему моменту M относительно этой точки всех внешних сил, приложенных к телу. Для отдельно взятой частицы (материальной точки) А (рис.104.1)моментом импульса Li относительно произвольно взятой точки О называется векторное произведение радиуса-вектора ri , проведенного из этой точки к частице А, на ее импульс p i : Li ri , pi (104.2) Рис 104.2. Момент силы Рис 104.1. Момент импульса Вектор Li направлен перпендикулярно плоскости, проведенной через векторы ri и p i (рис.104.1), и образует с ними правую тройку векторов (при наблюдении из конца Li видно, что вращение по кратчайшему расстоянию от ri к p i происходит против часовой стрелки). Моментом импульса любой системы частиц, в частности твердого тела, относительно точки называется геометрическая сумма моментов импульсов частиц, входящих в систему: L Li ri , pi (104.3) Векторное произведение радиуса-вектора ri и силы Fi , приложенной к частице А, называется моментом M i силы Fi относительно точки О: M i ri , Fi (104.4) Векторы ri , Fi и M i так же, как и ri , p i и Li образуют правую тройку век- торов (рис.104.2). Векторная сумма моментов M i всех внешних сил, приложенных к те-лу, называется результирующим (главным) моментом M внешних сил отно- сительно точки О: M Mi (104.5) Если спроецировать все величины, входящие в уравнение (104.1) на некото-рое направление z, то получим соотношение: dLz Mz dt (104.6) скорость изменения момента импульса системы частиц относительно направления z равна сумме моментов внешних сил относительно того же направления (за направление z часто выбирают направление оси вращения). Можно показать, что Lz I z (104.7) где I mi ri 2 - сумма произведений масс материальных точек на квадраты их расстояний до оси вращения (момент инерции системы частиц относи-тельно этой оси вращения), z - проекция угловой скорости на эту же ось. С учетом (104.7) перепишем (104.6) в виде: d Iz M z dt (104.8) Важным частным случаем является вращение твердого тела вокруг неподвижной оси. В этом случае момент инерции I при вращении остается постоянным. И уравнение (104.8) принимает вид: I d z I z M z dt (104.9) где z - проекция углового ускорения на ось вращения. Из уравнения (104.9) видно, что проекция на неподвижную ось враще-ния углового ускорения прямо пропорциональна результирующему моменту относительно этой оси всех внешних сил, действующих на тело. Уравнение (104.9) по своему содержанию аналогично второму закону Ньютона ma z Fz , поэтому его называют основным законом динамики для тела, вращающегося во- круг неподвижной оси. Как видно, при вращательном дви-жении роль силы играет момент силы, роль ускорения – угловое ускорение, а роль массы – момент инерции. В работе с помощью крестообразного маятника изучается динамика вращательного движения твердого тела. Анализ такого движения позволяет найти, используя экспериментальные данные, момент инерции грузов, закре-пленных на стержнях маятника. Этот же момент инерции может быть вычислен, если считать грузы материальными точками. В настоящей работе проводится сопоставление значений моментов инерции грузов, найденных этими двумя способами. Рис 104.3. Схема установки 104.3. Описание лабораторной установки. Лабораторная установка (маятник Обербека) (рис. 104.3) состоит из четырех стержней 1, закрепленных одним концом в ступице 2, которая, в свою очередь, укреплена со шкивом 3 на одной оси 4. По стержням могут перемещаться четыре (по одному на каждый стержень) груза 5 одинаковой массы m . На шкив наматывается нить 6, к свободному концу которой прикреплен груз 7 массой m. В верхнем положении, когда нить намотана на шкив, груз удерживается электромагнитом 8. При выключении электромагнита (при этом включается секундомер) груз начинает опускаться, приводя во вращение крестообразный маятник. В нижнем положении груз ударяется о контакт 9 и выключает секундомер, что дает возможность фиксировать время движения груза. 104.4. Методика эксперимента. На крестообразный маятник при его вращении действуют моменты сил создаваемых силой натяжения T (рис104.4) и силой трения в оси маятника (на рисунке сила не показана). Сила тяжести mм g маятника и сила Fp реакции его опор (подшипников) моментов сил относительно оси вращения не создают. Выберем направление z, совпадающее с осью вращения и направРис 104. Схема эксперимента ленное на нас. Тогда уравнения движения маятника в проекциях на это направление будет иметь вид: M M тр I (104.10) где M T r - проекция момента силы натяжения нити (r – радиус шкива); M тр - проекция момента силы трения; I - момент инерции маятника относительно оси вращения; - проекция углового ускорения на эту ось. Поступательное движение груза описывается вторым законом Ньютона в проекциях на направление у (рис.104.4): mg T ma (104.11) M M тр I Модуль a ускорения груза связан с высотой h, на которую он поднят, и временем t его движения соотношением: at 2 h 2 (104.12) Если считать нить нерастяжимой, то модули a ускорения груза и a тангенциального ускорения точек поверхности шкива будут равны. Тогда проекция углового ускорения на ось вращения маятника равна: a r (104.13) При опускании груза его потенциальная энергия переходит в кинетическую энергию системы груз – маятник, а часть энергии при этом расходуется на совершение работы против силы трения. Поэтому, для момента времени, когда груз достигнет крайнего нижнего положения, будет справедливо следующее уравнение: mgh Eк M тр (104.14) где mgh – потенциальная энергия груза на высоте h; E к - кинетическая энергия вращательного движения маятника в указанный выше момент времени (кинетическая энергия груза в этот момент времени равна нулю); M тр - работа против силы трения; - полный угол поворота маятника, выраженный в радианах. После указанного выше момента времени крестообразный маятник будет продолжать вращаться, и нить начнет наматываться на шкив, а груз подниматься. В результате этого он поднимется на максимальную высоту h1 , которая определяется по закону сохранения и превращения энергии из следующего выражения: Eк mgh1 M тр1 (104.15) где 1 - полный угол поворота маятника при подъеме на высоту h1 . Учитывая связь линейного и углового перемещений h r и h1 r1 из уравнений (104.14) и (104.15) находим: M тр mgrh h1 h h1 (104.16) Решение системы уравнений (104.10) – (104.13) и уравнения (104.16) с учетом соотношения T T дает выражение для момента инерции I маятника относительно оси вращения: h1 I mr 2 gt 2 1 hh h1 (104.17) Момент инерции обладает свойствами аддитивности, то есть момент инерции тела относительно какой-либо оси равен сумме моментов инерции его частей относительно той же оси. Поэтому момент инерции I маятника с грузами на стержнях можно представить как сумму моментов инерции I 0 маятника без грузов и момента инерции 4 I грузов относительно оси вращения: I I 0 4I (104.18) (чтобы равные по массе грузы имели одинаковые моменты инерции, их надо устанавливать на одинаковом расстоянии r от оси вращения). В настоящей работе I и I 0 определяются из экспериментальных данных, а Рис 104.5. К вычислению момента инерции значение 4 I находится из формулы (104.18). Момент инерции четырех грузов относительно оси вращения маятника можно вычислить, кроме того, с использованием параметров установки. Если расстояние R (рис.104.5) от центра масс груза до оси вращения больше его продольного размера l не менее, чем в 4-5 раз, то груз массой m можно приближенно считать материальной точкой. В этом случае момент инерции грузов вычисляется по формуле: 4I 4mR 2 (104.19) При этом (рис.104.5) R L Dст l 2 2 (104.20) где L - расстояние от поверхности ступицы до ближайшего к ней конца груза на ступице; Dст – диаметр ступицы l – продольный размер груза. Таким образом, в работе момент инерции четырех грузов определяется двумя способами, а полученные значения сравниваются между собой. 104.5. Порядок выполнения работы. 1. Закрепите на стержнях крестообразного маятника четыре груза на максимально возможных расстояниях R от оси вращения так, чтобы маятник находился в безразличном равновесии. ВНИМАНИЕ! ВО ИЗБЕЖАНИЕ СОСКАЛЬЗЫВАНИЯ ГРУЗОВ СО СТЕРЖНЕЙ МАЯТНИКА НАДЕЖНО ЗАФИКСИРУЙТЕ ИХ СТОПОРНЫМИ ВИНТАМИ, А НА КОНЦЫ СТЕРЖНЕЙ НАВИНЧИВАЙТЕ ГАЙКИ. 2. Намотайте нить на шкив маятника так, чтобы груз удерживался электромагнитом. 3. Измерьте линейкой расстояние L от поверхности ступицы до ближайшего к ней конца груза (рис.104.5) и высоту h, на которую поднят груз. 4. Переключите тумблер, установленный рядом с электрическим секундомером, из положения «электромагнит» в положение «секундомер». Когда груз опустится и секундомер выключится, проследите за подъемом груза и измерьте с помощью линейки высоту h1 на которую он поднимется. После этого снимите показания секундомера. 5. Не изменяя условия опыта (оставляя грузы на том же расстоянии от оси вращения), повторите измерения еще два раза (перед каждым измерением времени движения груза необходимо сбрасывать показания секундомера). 6. Измените положение грузов, расположив их примерно посредине стержней маятника, проверьте, находится ли маятник в безразличном равновесии (см.п.1), и проведите 3 раза измерения указанные в пп.2-4. 7. Снимите грузы со стержней маятника и проведите 3 опыта, указанные в пп.2-4 для определения момента инерции маятника без грузов. 8. Результаты занесите в таблицу 1. 9. Занесите в таблицу 2 значения указанных на лабораторном столе параметров установки. 104.6. Обработка результатов измерений. 1. По данным трех опытов в каждом случае вычислите средние арифметические значения <t> и <h1>. 2. По формуле (104.17), используя соответствующие средние арифметические значения <t> и <h1>, вычислите момент инерции I маятника при двух положениях грузов на стержнях 3. По формуле (104.17), используя соответствующие средние арифметические значения <t> и <h1>, вычислите момент инерции I 0 маятника без грузов на стержнях 4. Используя формулу (104.18) определите момент инерции 4 I четырех грузов для двух их положений на стержнях. 5. Вычислите, пользуясь формулой (104.19), момент инерции этих же грузов. 6. Результаты расчетов по пп.2-5 занесите в таблицу 3. Сравните полученные в п.4 и п.5 значения моментов инерции грузов и сделайте вывод. 7. Укажите основные источники погрешностей при определении моментов инерции маятника и грузов на стержнях. Таблица 1. Экспериментальные данные Время движения груза Начальная вы- Максимальная вы- Расстояние от сота подъема сота подъема груза ступицы до гру- груза t, c <t>, c h1, м h, м зов на стержнях <h1>, м L, м 9 значений Таблица 2. Значения параметров установки Масса груза m, кг Масса грузов на стержнях Продольный Диаметр Радиус шкива, размер грузов на 4m', кг r, м ступиц, стержнях, Dст, м l, м Таблица 3. Результаты расчета моментов инерции маятника и грузов на стержнях Момент инерции Момент инерции Момент инер- Положение маятника с гру- ции маятника грузов зами без грузов I, кг∙м2 I0, кг∙м2 грузов 4I', кг∙м2 По По формуле формуле (104.19) (104.20) На максимальном расстоянии Посередине стержней 104.7. Контрольные вопросы. 1. Дайте определения момента силы. Моменты каких сил действуют на крестообразный маятник при его вращении? 2. Дайте определения момента инерции материальной точки, твердого тела. В чем заключается свойство аддитивности момента инерции? 3. Сформулируйте основной закон динамики вращательного движения твердого тела. Запишите уравнение вращательного движения маятника в проекциях на ось вращения. 4. Дайте определение момента импульса материальной точки относительно произвольной точки, произвольной оси, определение момента импульса твердого тела относительно произвольной точки, произвольной оси. 5. Определите момент инерции тонкого однородного стержня относительно оси, проходящей через центр масс перпендикулярно боковой поверхности стержня. 6. Определите момент инерции тонкого однородного обруча относительно оси, проходящей через центр масс перпендикулярно плоскости обруча. 7. Определите проекцию момента импульса Земли на собственную ось вращения, если считать Землю однородным шаром массы 6·1024 кг. Радиус Земли равен 6,4·106 м. Список рекомендуемой литературы: 1. Савельев И.В. Курс общей физики, т.1, М.: Наука, 1982. – 382 с. 2. Детлаф А.А., Яворский Б.М., Курс общей физики, т.1, М: Высшая школа, 1973. – 405 с. 3. Трофимова Т.И. Курс физики, М.: Высшая школа, 1990. – 291 с.